
系统工程与电子技术 ›› 2022, Vol. 44 ›› Issue (1): 117-126.doi: 10.12305/j.issn.1001-506X.2022.01.16
方澄*, 路稳, 姬菁颖, 宋玉蒙, 梁斐菲, 罗志伟
收稿日期:2020-11-17
出版日期:2022-01-01
发布日期:2022-01-19
通讯作者:
方澄
作者简介:方澄(1980—), 男, 讲师, 博士, 主要研究方向为数据挖掘、大数据、计算机视觉|路稳(1995—), 女, 硕士研究生, 主要研究方向为计算机视觉、目标跟踪|姬菁颖(1996—), 女, 硕士研究生, 主要研究方向为计算机视觉、目标跟踪|宋玉蒙(1998—), 男, 硕士研究生, 主要研究方向为计算机视觉|梁斐菲(1996—), 女, 硕士研究生, 主要研究方向为计算机视觉|罗志伟(1997—), 男, 硕士研究生, 主要研究方向为计算机视觉
基金资助:Cheng FANG*, Wen LU, Jingying JI, Yumeng SONG, Feifei LIANG, Zhiwei LUO
Received:2020-11-17
Online:2022-01-01
Published:2022-01-19
Contact:
Cheng FANG
摘要:
针对核相关滤波(kernel correlation filter, KCF)算法在目标旋转、形变等复杂环境中容易产生模型漂移的问题, 提出了一种基于KCF自适应更新的目标跟踪算法(adaptive updating target tracking algorithm based on KCF, AUKCF)。该方法首先对响应进行多峰判断, 然后针对多峰现象使用显著性检测进行目标的重新定位, 减少模型漂移。为了保证显著性检测的准确性, 使用重检测手段进行显著性检测结果的校准。最后, 使用斯皮尔曼相关性判断目标是否存在遮挡、严重形变等问题, 并根据斯皮尔曼相关性结果决定是否进行模型的更新, 减少模型退化, 提高更新效率。在目标跟踪数据集OTB2015上进行测试, 实验结果表明, AUKCF相比KCF算法的精度和成功率分别提高14%和11.8%, 并且AUKCF算法比目前流行的深度学习算法更加简洁, 对设备性能要求更低, 算法实时性可以达到93.84 fps。
中图分类号:
方澄, 路稳, 姬菁颖, 宋玉蒙, 梁斐菲, 罗志伟. 基于外观相似性更新的相关滤波跟踪算法[J]. 系统工程与电子技术, 2022, 44(1): 117-126.
Cheng FANG, Wen LU, Jingying JI, Yumeng SONG, Feifei LIANG, Zhiwei LUO. Correlation filter-tracking algorithm based on appearance similarity update[J]. Systems Engineering and Electronics, 2022, 44(1): 117-126.

图1
AUKCF算法总框架"

图2
斯皮尔曼相似性"
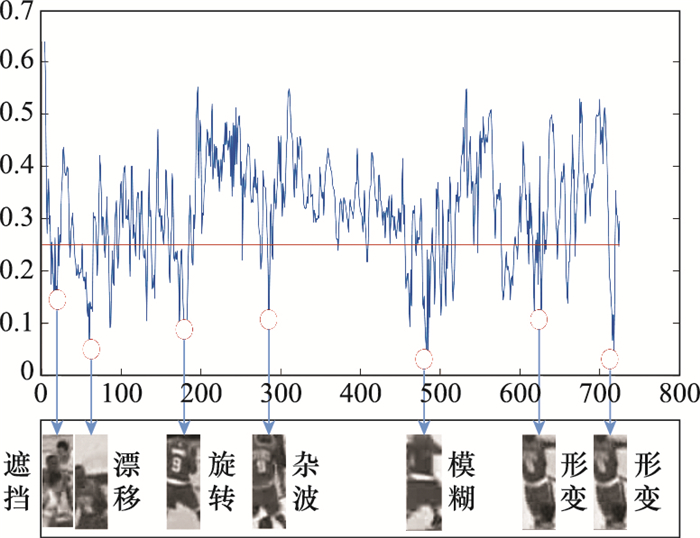
表1
消融实验设置"
| 算法名称 | 显著性检测调节 | 自适应更新 |
| KCF | - | - |
| KCFup | - | √ |
| KCFsd | √ | - |
| AUKCF | √ | √ |
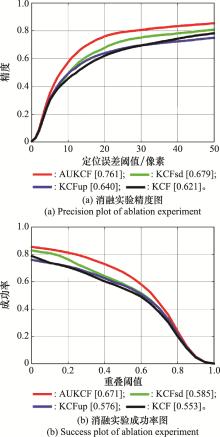
图3
消融实验精度图和成功率图"


图4
部分视频序列跟踪结果"

表2
VOT2018实验结果"
| 算法 | 相机抖动(准确率) | 超出视野(准确率) | 光照变化(准确率) | 快速运动(准确率) | 遮挡(准确率) | 尺度变化(准确率) | 准确率均值 | 准确率加权 | 准确率合并方差 | EAO |
| AUKCF | 0.522 8 | 0.464 6 | 0.476 6 | 0.461 0 | 0.425 7 | 0.363 5 | 0.452 4 | 0.465 4 | 0.469 0 | 0.119 9 |
| DensSiam[ | 0.468 7 | 0.472 2 | 0.486 9 | 0.441 5 | 0.420 2 | 0.348 5 | 0.439 7 | 0.445 7 | 0.456 5 | 0.167 8 |
| PBTS[ | 0.389 0 | 0.386 8 | 0.361 4 | 0.347 3 | 0.312 7 | 0.335 8 | 0.355 5 | 0.367 8 | 0.375 3 | 0.147 2 |
| MIL[ | 0.377 0 | 0.410 7 | 0.380 3 | 0.360 0 | 0.358 0 | 0.291 4 | 0.362 9 | 0.371 4 | 0.385 2 | 0.113 8 |
| BST[ | 0.242 0 | 0.308 2 | 0.270 6 | 0.236 8 | 0.260 8 | 0.236 8 | 0.259 2 | 0.262 5 | 0.272 6 | 0.113 7 |
| struck2011[ | 0.437 3 | 0.409 0 | 0.420 2 | 0.408 3 | 0.378 0 | 0.312 4 | 0.394 2 | 0.402 3 | 0.410 4 | 0.093 0 |
| BDF[ | 0.379 0 | 0.361 5 | 0.400 5 | 0.355 7 | 0.378 8 | 0.309 4 | 0.364 1 | 0.361 2 | 0.365 2 | 0.091 5 |
| Matflow | 0.402 9 | 0.416 9 | 0.405 5 | 0.354 9 | 0.360 8 | 0.314 1 | 0.375 8 | 0.384 3 | 0.398 2 | 0.090 0 |
| MRSNCC | 0.318 1 | 0.357 1 | 0.359 9 | 0.277 0 | 0.285 1 | 0.295 1 | 0.315 4 | 0.318 5 | 0.328 2 | 0.079 7 |
| DSST[ | 0.407 5 | 0.418 2 | 0.474 8 | 0.354 6 | 0.349 7 | 0.301 4 | 0.384 4 | 0.384 9 | 0.396 7 | 0.078 0 |
| IVT[ | 0.377 2 | 0.431 4 | 0.421 9 | 0.325 8 | 0.361 6 | 0.330 1 | 0.374 7 | 0.378 8 | 0.396 4 | 0.075 0 |
| CPOINT | 0.295 9 | 0.326 3 | 0.281 1 | 0.261 7 | 0.283 9 | 0.310 6 | 0.293 2 | 0.300 4 | 0.308 8 | 0.069 4 |
| L1APG[ | 0.420 3 | 0.467 1 | 0.391 0 | 0.378 5 | 0.382 1 | 0.299 7 | 0.389 8 | 0.407 8 | 0.428 3 | 0.068 6 |
| FragTrack | 0.392 2 | 0.403 7 | 0.373 5 | 0.348 0 | 0.325 0 | 0.328 4 | 0.361 8 | 0.374 3 | 0.390 1 | 0.068 2 |
| Matrioska[ | 0.431 3 | 0.437 5 | 0.428 9 | 0.383 5 | 0.364 8 | 0.295 8 | 0.390 3 | 0.402 0 | 0.416 0 | 0.064 2 |
| 1 | MAGGIO E , CAVALLARO A . Video tracking: theory and practice[M]. Oxford: Wiley, 2011. |
| 2 |
ZHOU Y , WANG T , HU R , et al. Multiple kernelized correlation filters (MKCF) for extended object tracking using X-band marine radar data[J]. IEEE Trans.on Signal Processing, 2019, 67 (14): 3676- 3688.
doi: 10.1109/TSP.2019.2917812 |
| 3 | BOLME D S, BEVERIDGE J R, DRAPER B A, et al. Visual object tracking using adaptive correlation filters[C]//Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2010: 2544-2550. |
| 4 | HENRIQUES J F, CASEIRO R, MARTINS P, et al. Exploiting the circulant structure of tracking-by-detection with kernels[C]// Proc. of the European Conference on Computer Vision, 2012: 702-715. |
| 5 | ZHANG K H, ZHANG L, LIU Q S, et al. Fast visual tracking via dense spatio-temporal context learning[C]//Proc. of the European Conference on Computer Vision, 2014: 127-141. |
| 6 | DANELLJAN M, SHAHBAZ K F, FELSBERG M, et al. Adaptive color attributes for real-time visual tracking[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2014: 1090-1097. |
| 7 | POSSEGGER H, MAUTHNER T, BISCHOF H. In defense of color-based model-free tracking[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2015: 2113-2120. |
| 8 | DALAL N, TRIGGS B. Histograms of oriented gradients for human detection[C]//Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2005: 886-893. |
| 9 | HENRIQUES J F , CASEIRO R , MARTINS P , et al. High-speed tracking with kernelized correlation filters[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2014, 37 (3): 583- 596. |
| 10 | WANG N, LI S, GUPTA A, et al. Transferring rich feature hierarchies for robust visual tracking[J]. arXiv preprint arXiv: 1501.04587, 2015. |
| 11 | WANG M M, LIU Y, HUANG Z Y. Large margin object tracking with circulant feature maps[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 4021-4029. |
| 12 | WANG N, SHI J, YEUNG D Y, et al. Understanding and diagnosing visual tracking systems[C]//Proce. of the IEEE International Conference on Computer Vision, 2015: 3101-3109. |
| 13 | CHOI J, JIN C H, JEONG J, et al. Visual tracking using attention-modulated disintegration and integration[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 4321-4330. |
| 14 | LI Y, ZHU J, HOI S C H, et al. Robust estimation of similarity transformation for visual object tracking[C]//Proc. of the AAAI Conference on Artificial Intelligence, 2019: 8666-8673. |
| 15 | BERTINETTO L, VALMADRE J, GOLODETZ S, et al. Staple: complementary learners for real-time tracking[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 1401-1409. |
| 16 | MA C , HUANG J B , YANG X , et al. Robust visual tracking via hierarchical convolutional features[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2018, 41 (11): 2709- 2723. |
| 17 | VALMADRE J, BERTINETTO L, HENRIQUES J, et al. End-to-end representation learning for correlation filter based tracking[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 2805-2813. |
| 18 | MA C, HUANG J B, YANG X, et al. Hierarchical convolutional features for visual tracking[C]//Proc. of the IEEE International Conference on Computer Vision, 2015: 3074-3082. |
| 19 | LUKEZIC A, MATAS J, KRISTAN M. D3S-A discriminative single shot segmentation tracker[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 7133-7142. |
| 20 | YANG T Y, XU P F, HU R B, et al. ROAM: recurrently optimizing tracking model[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 6718-6727. |
| 21 | DANELLJAN M, GOOL L V, TIMOFTE R. Probabilistic regression for visual tracking[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 7183-7192. |
| 22 | BERTINETTO L, VALMADRE J, HENRIQUES J F, et al. Fully-convolutional siamese networks for object tracking[C]//Proc. of the European Conference on Computer Vision, 2016: 850-865. |
| 23 | WANG Q, ZHANG L, BERTINETTO L, et al. Fast online object tracking and segmentation: a unifying approach[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2019: 1328-1338. |
| 24 | VOIGTLAENDER P, LUITEN J, TORR P H S, et al. Siam R-CNN: visual tracking by re-detection[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 6578-6588. |
| 25 | XU Y D, WANG Z Y, LI Z X, et al. SiamFC++: towards robust and accurate visual tracking with target estimation guidelines[C]//Proc. of the AAAI Conference on Artificial Intelligence, 2020: 12549-12556. |
| 26 | XU T, FENG Z H, WU X J, et al. Joint group feature selection and discriminative filter learning for robust visual object tracking[C]//Proc. of the IEEE International Conference on Computer Vision, 2019: 7950-7960. |
| 27 |
ITTI L , KOCH C , NIEBUR E . A model of saliency-based visual attention for rapid scene analysis[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 1998, 20 (11): 1254- 1259.
doi: 10.1109/34.730558 |
| 28 | HAREL J, KOCH C, PERONA P. Graph-based visual saliency[C]//Proc. of the Advances in Neural Information Processing Systems, 2007: 545-552. |
| 29 |
余汉蓉, 林彬, 俞增林. 结合SAMF和视觉显著性的目标跟踪算法[J]. 电光与控制, 2021, 28 (1): 1- 5.
doi: 10.3969/j.issn.1671-637X.2021.01.001 |
|
YU H R , LIN B , YU Z L . Object tracking algorithm combining SAMF and visual saliency[J]. Electronics Optics & Control, 2021, 28 (1): 1- 5.
doi: 10.3969/j.issn.1671-637X.2021.01.001 |
|
| 30 |
谢瑜, 陈莹. 融合稀疏重构图像显著性的相关滤波跟踪[J]. 计算机工程与应用, 2019, 55 (22): 106- 113, 224.
doi: 10.3778/j.issn.1002-8331.1807-0234 |
|
XIE Y , CHEN Y . Correlation filter tracking algorithm fusing image saliency via sparse reconstruction[J]. Computer Engineering and Applications, 2019, 55 (22): 106- 113, 224.
doi: 10.3778/j.issn.1002-8331.1807-0234 |
|
| 31 | DANELLJAN M, HAGER G, SHAHBAZ K F, et al. Learning spatially regularized correlation filters for visual tracking[C]//Proc. of the IEEE International Conference on Computer Vision, 2015: 4310-4318. |
| 32 | LI F, TIAN C, ZUO W M, et al. Learning spatial-temporal regularized correlation filters for visual tracking[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2018: 4904-4913. |
| 33 | HUANG Z Y, FU C H, LI Y M, et al. Learning aberrance repressed correlation filters for real-time UAV tracking[C]//Proc. of the IEEE International Conference on Computer Vision, 2019: 2891-2900. |
| 34 | LI Y, FU C, DING F, et al. Autotrack: towards high-performance visual tracking for UAV with automatic spatio-temporal regularization[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020: 11923-11932. |
| 35 |
WU Y , LIM J , YANG M H . Object tracking benchmark[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2015, 37 (9): 1834- 1848.
doi: 10.1109/TPAMI.2014.2388226 |
| 36 | KRISTAN M, LEONARDIS A, MATAS J, et al. The sixth visual object tracking VOT2018 challenge results[C]//Proc. of the European Conference on Computer Vision Workshops, 2018. |
| 37 | DANELLJAN M, HÄGER G, KHAN F, et al. Accurate scale estimation for robust visual tracking[C]//Proc. of the British Machine Vision Conference, 2014. |
| 38 | LI Y, ZHU J K. A scale adaptive kernel correlation filter tracker with feature integration[C]//Proc. of the European Conference on Computer Vision, 2014: 254-265. |
| 39 | CHOI J, JIN C H, YUN S, et al. Attentional correlation filter network for adaptive visual tracking[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 4807-4816. |
| 40 | WANG N, SONG Y, MA C, et al. Unsupervised deep tracking[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2019: 1308-1317. |
| 41 | LI P X, CHEN B Y, OUYANG W L, et al. Gradnet: gradient-guided network for visual object tracking[C]//Proc. of the IEEE International Conference on Computer Vision, 2019: 6162-6171. |
| 42 | ABDELPAKEY M H, SHEHATA M S, MOHAMED M M. Denssiam: end-to-end densely-siamese network with self-attention model for object tracking[C]//Proc. of the International Symposium on Visual Computing, 2018: 463-473. |
| 43 | DE A G, EVERSON R M. Part-based tracking by sampling[EB-OL]. [2020-11-10]https://arxiv-org/pdt/1805.08511. |
| 44 | BABENKO B , YANG M H , BELONGIE S . Robust object tracking with online multiple instance learning[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2010, 33 (8): 1619- 1632. |
| 45 |
BATTISTONE F , PETROSINO A , SANTOPIETRO V . Watch out: embedded video tracking with BST for unmanned aerial vehicles[J]. Journal of Signal Processing Systems, 2018, 90 (6): 891- 900.
doi: 10.1007/s11265-017-1279-x |
| 46 | HARE S , GOLODETZ S , SAFFARI A , et al. Struck: structured output tracking with kernels[J]. IEEE Trans.on Pattern Analysis and Machine Intelligence, 2015, 38 (10): 2096- 2109. |
| 47 | MARESCA M E, PETROSINO A. Clustering local motion estimates for robust and efficient object tracking[C]//Proc. of the European Conference on Computer Vision, 2014: 244-253. |
| 48 | ROSS D A , LIM J , LIN R S , et al. Incremental learning for robust visual tracking[J]. International Journal of Computer Vision, 2008, 77 (1/3): 125- 141. |
| 49 | ADAM A, RIVLIN E, SHIMSHONI I. Robust fragments-based tracking using the integral histogram[C]//Proc. of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 2006: 798-805. |
| 50 | MARESCA M E, PETROSINO A. Matrioska: a multi-level approach to fast tracking by learning[C]//Proc. of the International Conference on Image Analysis and Processing, 2013: 419-428. |
| [1] | 仇祝令, 查宇飞, 李振宇, 李禹铭, 张鹏, 朱川. 基于多模型蒸馏的时间正则化相关滤波跟踪算法[J]. 系统工程与电子技术, 2022, 44(8): 2448-2456. |
| [2] | 侯子林, 程婷, 彭瀚. 基于量测转换序贯滤波的GMPHD机动目标跟踪[J]. 系统工程与电子技术, 2022, 44(8): 2474-2482. |
| [3] | 史浩然, 卢发兴, 祁江鑫, 杨光. 基于辅助信标的无人机协同目标跟踪[J]. 系统工程与电子技术, 2022, 44(7): 2302-2310. |
| [4] | 金国栋, 薛远亮, 谭力宁, 许剑锟. 基于孪生神经网络的目标跟踪算法进展研究[J]. 系统工程与电子技术, 2022, 44(6): 1805-1822. |
| [5] | 翟光, 王妍欣, 孙一勇. 基于低轨星网的多目标协同跟踪滤波技术[J]. 系统工程与电子技术, 2022, 44(6): 1957-1967. |
| [6] | 王帅, 向建军, 彭芳, 唐书娟. 基于新最速下降法的目标跟踪算法[J]. 系统工程与电子技术, 2022, 44(5): 1512-1519. |
| [7] | 辛怀声, 曹晨. 基于交互多模型的分组δ-广义标签多伯努利算法[J]. 系统工程与电子技术, 2022, 44(4): 1128-1138. |
| [8] | 谢家豪, 黄树彩, 韦道知, 张曌宇, 王文豪. 基于PEV准则的不确定混合多传感器联盟求解[J]. 系统工程与电子技术, 2022, 44(3): 819-826. |
| [9] | 宋子壮, 杨嘉伟, 张东方, 王诗强, 张硕. 基于无锚框的红外多类别多目标实时跟踪网络[J]. 系统工程与电子技术, 2022, 44(2): 401-409. |
| [10] | 姚云翔, 陈莹. 注意力机制下双模态交互融合的目标跟踪网络[J]. 系统工程与电子技术, 2022, 44(2): 410-419. |
| [11] | 辛怀声, 宋鹏汉, 曹晨. 多模型广义标签多伯努利滤波器[J]. 系统工程与电子技术, 2022, 44(12): 3603-3613. |
| [12] | 刘浩楠, 宋骊平. 基于核Fisher判别的群结构更新模型及群目标跟踪算法[J]. 系统工程与电子技术, 2022, 44(10): 3012-3019. |
| [13] | 黄月平, 李小锋, 杨小冈, 齐乃新, 卢瑞涛, 张胜修. 基于相关滤波的视觉目标跟踪算法新进展[J]. 系统工程与电子技术, 2021, 43(8): 2051-2065. |
| [14] | 赵跃新, 齐望东, 刘鹏, 袁恩, 徐兵. 三维AoA目标跟踪的二次约束卡尔曼滤波算法[J]. 系统工程与电子技术, 2021, 43(8): 2263-2272. |
| [15] | 孙明杰, 周林, 顾金玲, 李培庚. 基于多域网络的红外目标跟踪算法[J]. 系统工程与电子技术, 2021, 43(5): 1176-1183. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||