
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (3): 1000-1009.doi: 10.12305/j.issn.1001-506X.2026.03.24
• 制导、导航与控制 • 上一篇
孟祥瑞1, 王常虹1,*, 马广程1, 夏红伟1, 钟佳朋1, 崔总泽2
收稿日期:2025-03-17
出版日期:2026-03-25
发布日期:2026-04-13
通讯作者:
王常虹
作者简介:孟祥瑞(1989—),男,博士研究生,主要研究方向为洛伦兹力电机和磁轴承设计、超精密运动控制Xiangrui MENG1, Changhong WANG1,*, Guangcheng MA1, Hongwei XIA1, Jiapeng ZHONG1, Zongze CUI2
Received:2025-03-17
Online:2026-03-25
Published:2026-04-13
Contact:
Changhong WANG
摘要:
针对微重力环境下空间光学载荷地面测试对超精密轴向定位平台(ultra-precision axial positioning platform,UAPP)提出的短行程、高精度、高动态响应、强抗干扰等要求,提出一种将驱动/支撑构型与高性能控制算法有机集成的UAPP方案。采用三维有限元方法深入研究四象限永磁体阵列洛伦兹力电机和非等宽Halbach阵列磁轴承随位移变化的力和刚度特性,为建立准确动力学模型及性能分析奠定基础。同时,提出基于名义辅助模型的复合非线性反馈自抗扰控制(composite nonlinear feedback active disturbance rejection control based on a nominal auxiliary model,NAM-CNFADRC)算法。仿真和实验结果均表明,与比例-积分-微分和经典二阶线性自抗扰控制算法相比,NAM-CNFADRC在跟踪精度、最大超调量、调节时间以及扰动抑制方面均表现出显著优势。
中图分类号:
孟祥瑞, 王常虹, 马广程, 夏红伟, 钟佳朋, 崔总泽. 超精密轴向定位平台力特性分析及自抗扰控制[J]. 系统工程与电子技术, 2026, 48(3): 1000-1009.
Xiangrui MENG, Changhong WANG, Guangcheng MA, Hongwei XIA, Jiapeng ZHONG, Zongze CUI. Force characteristics analysis and active disturbance rejection control of ultra-precision axial positioning platform[J]. Systems Engineering and Electronics, 2026, 48(3): 1000-1009.
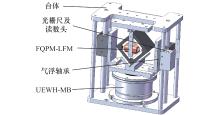
图1
UAPP总装图"
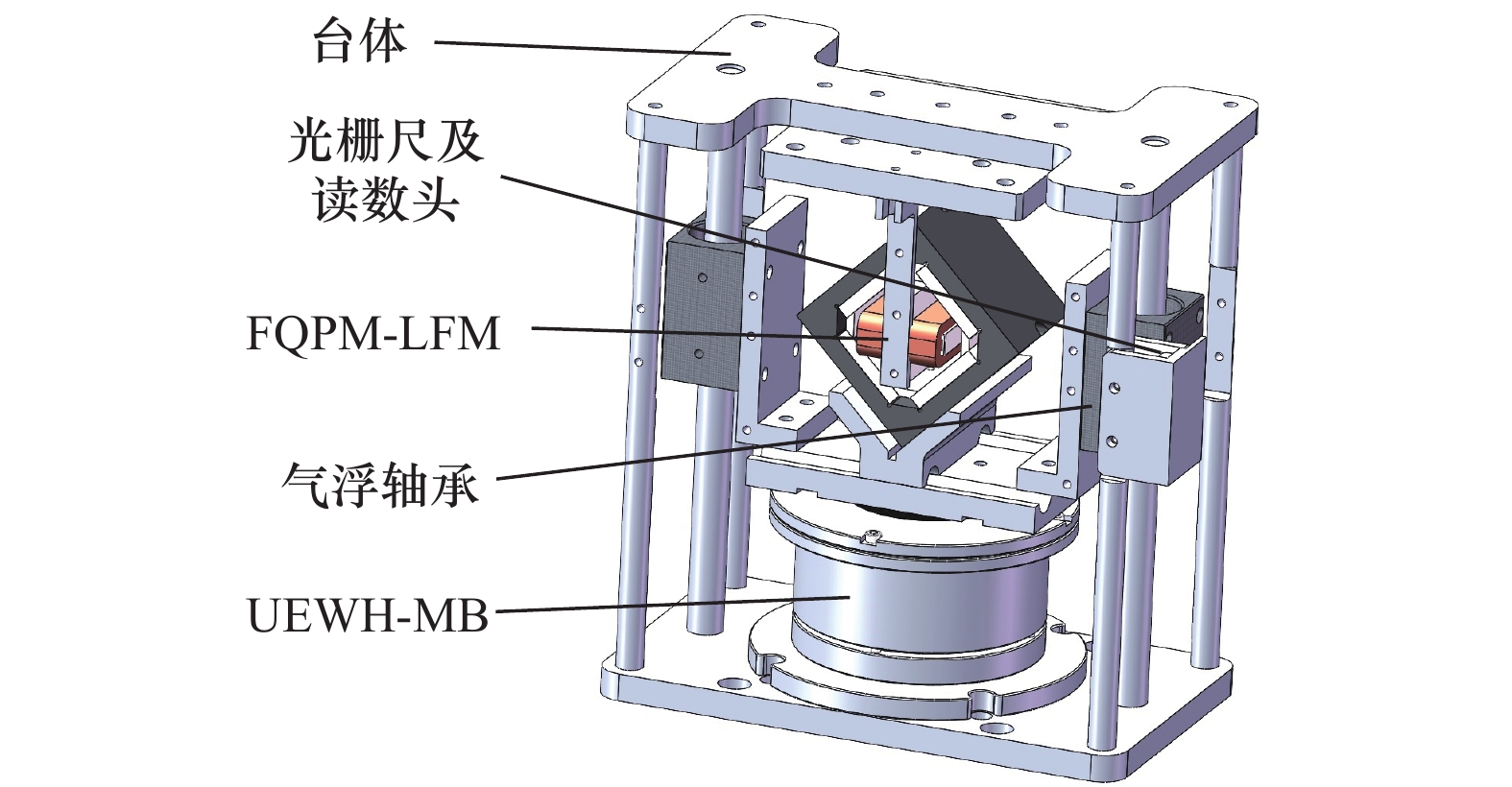
图2
FQPM-LFM和UEWH-MB结构图"

图3
FQPM-LFM结构示意图及磁场分布"
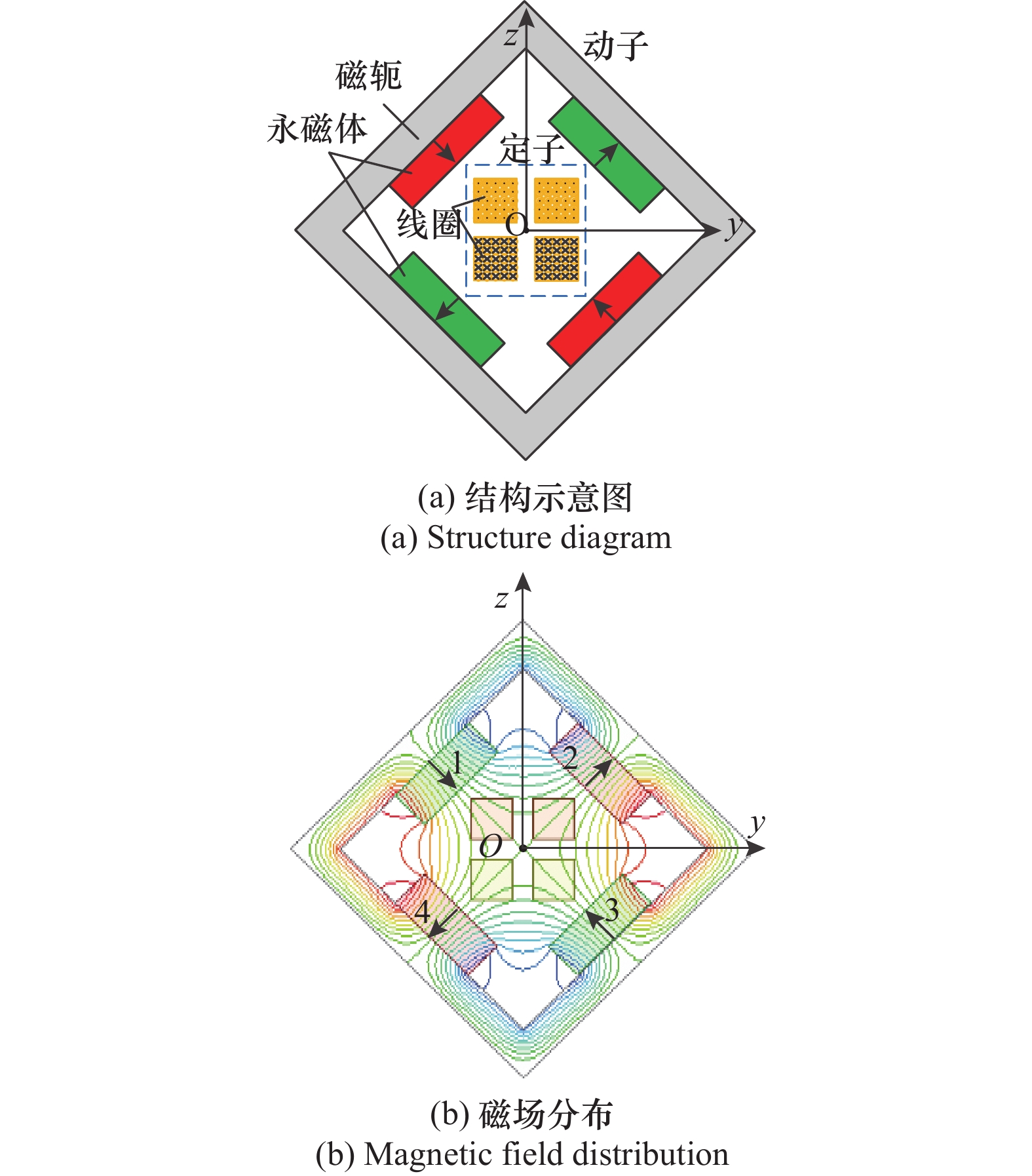

图4
FQPM-LFM不同电流和位移下电磁推力分布曲线"
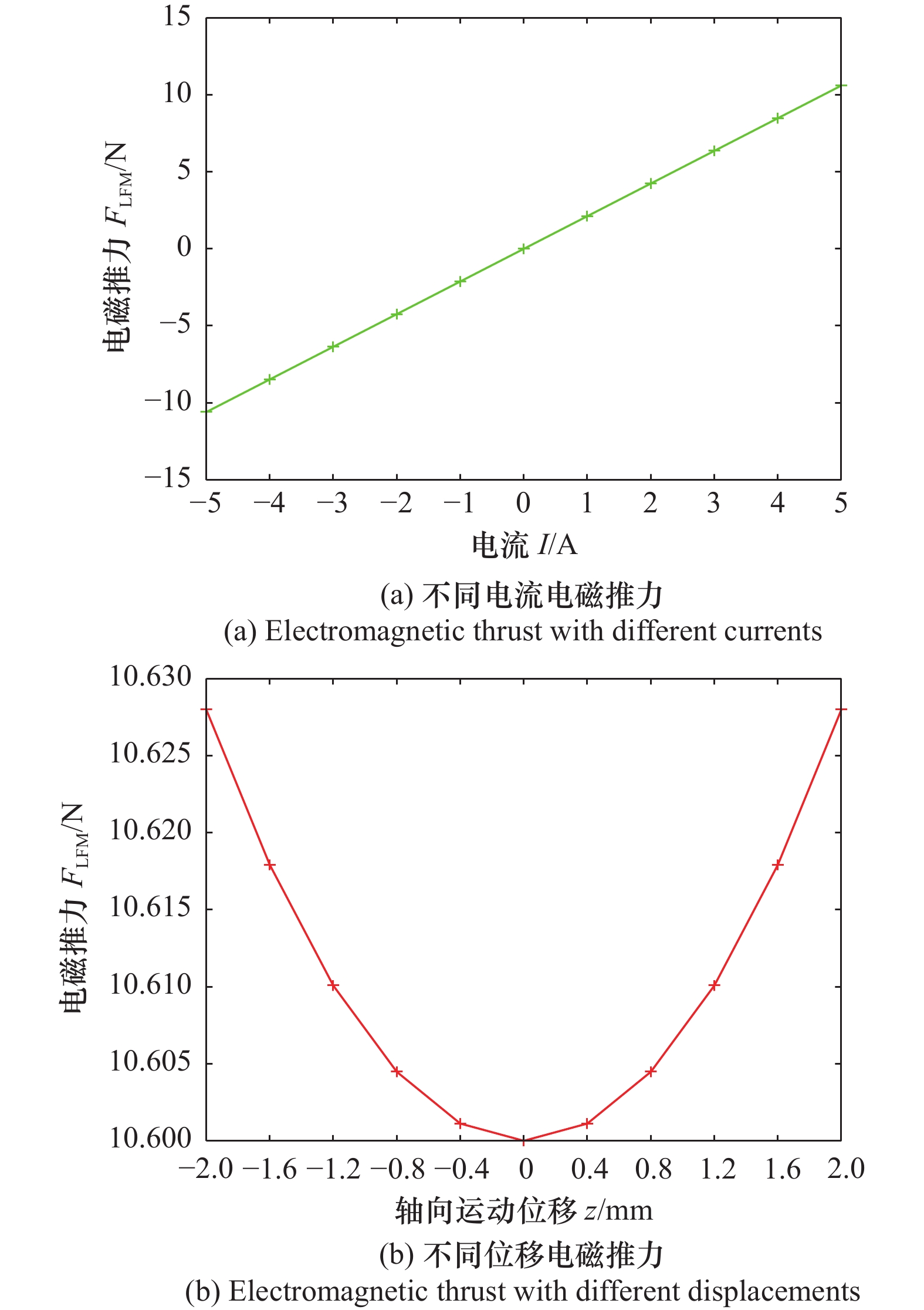
图5
UEWH-MB结构示意图及磁场分布"
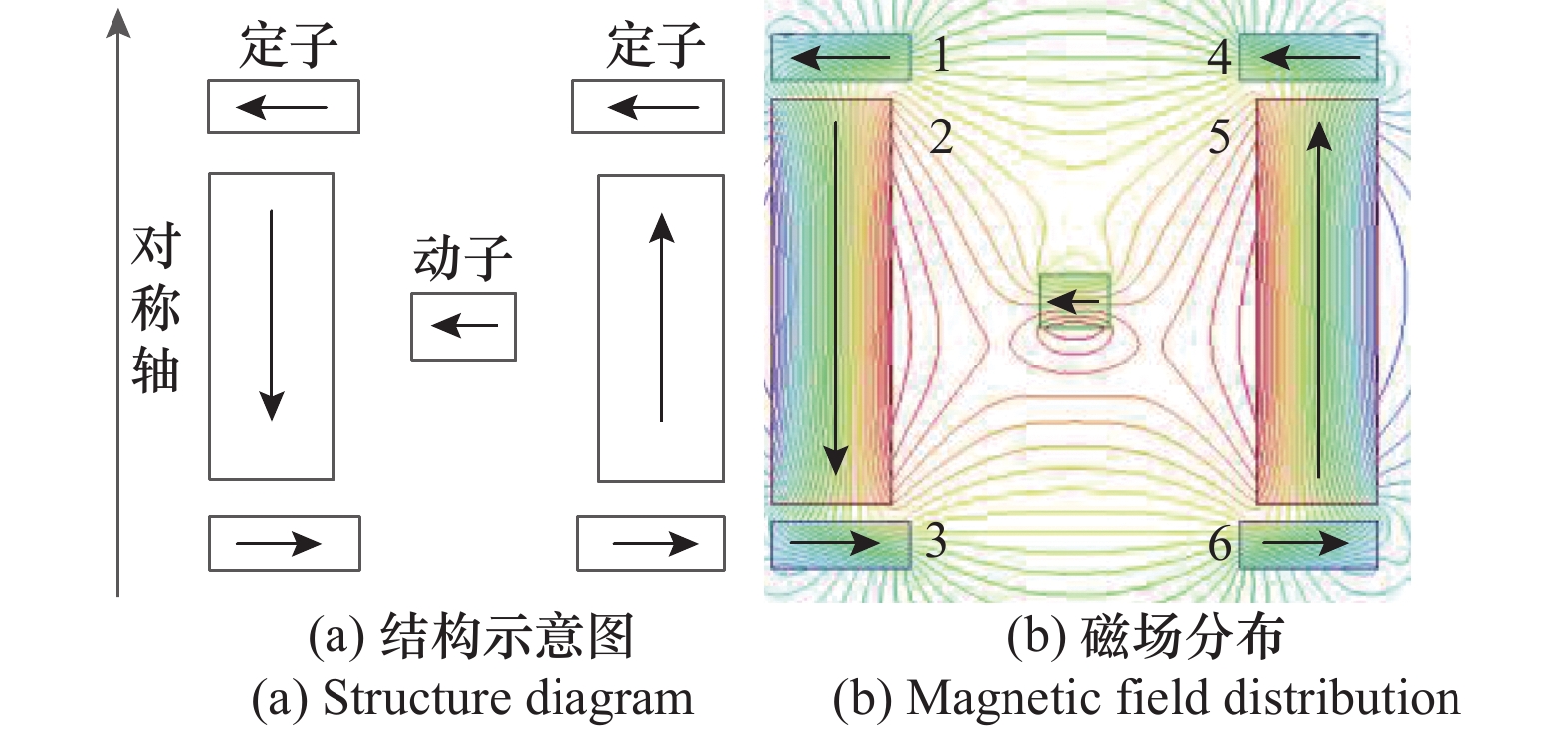

图6
UEWH-MB不同位移下悬浮力和悬浮力刚度曲线"
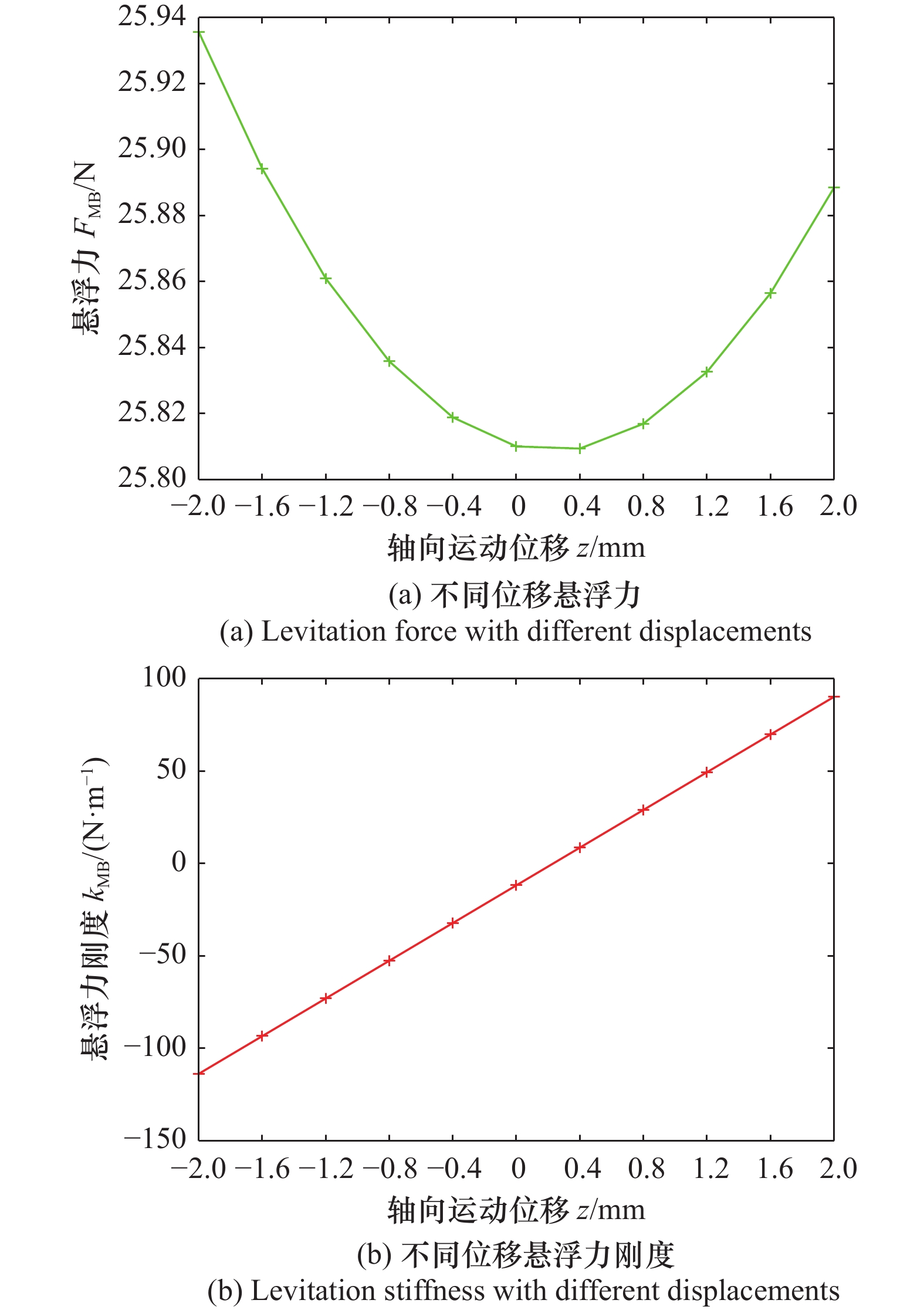

图7
UAPP的系统框图"
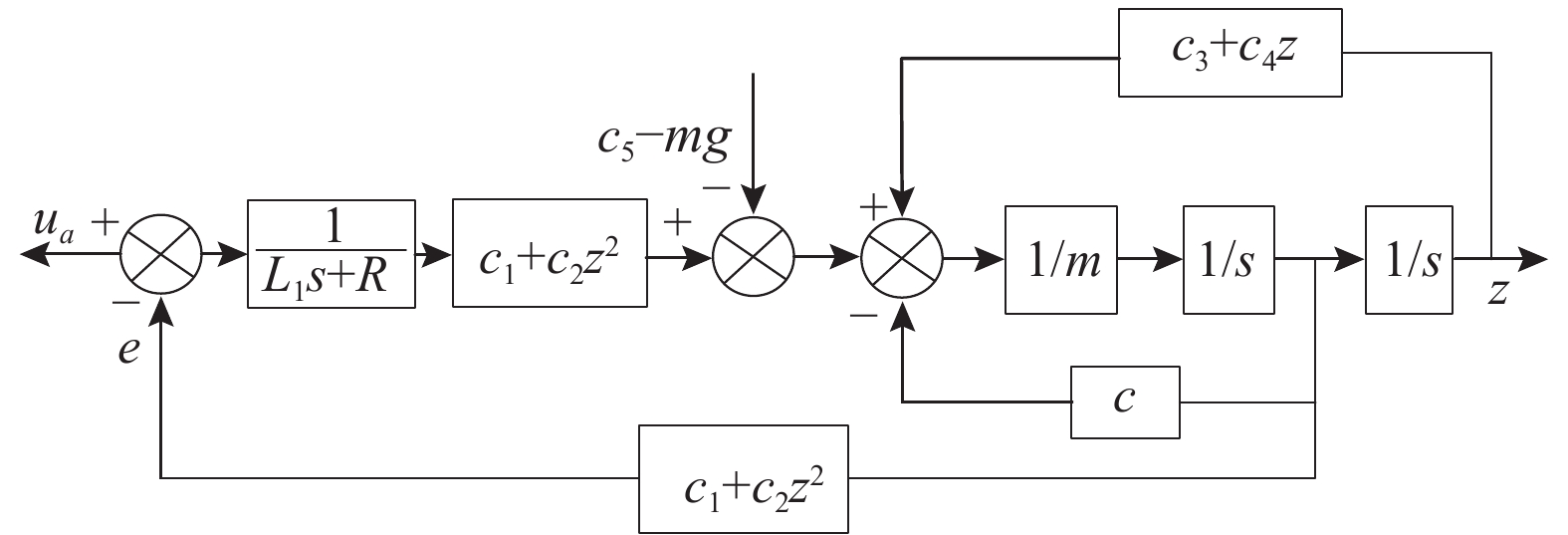
图8
不同推力波动系数下s型规划的位置响应曲线"
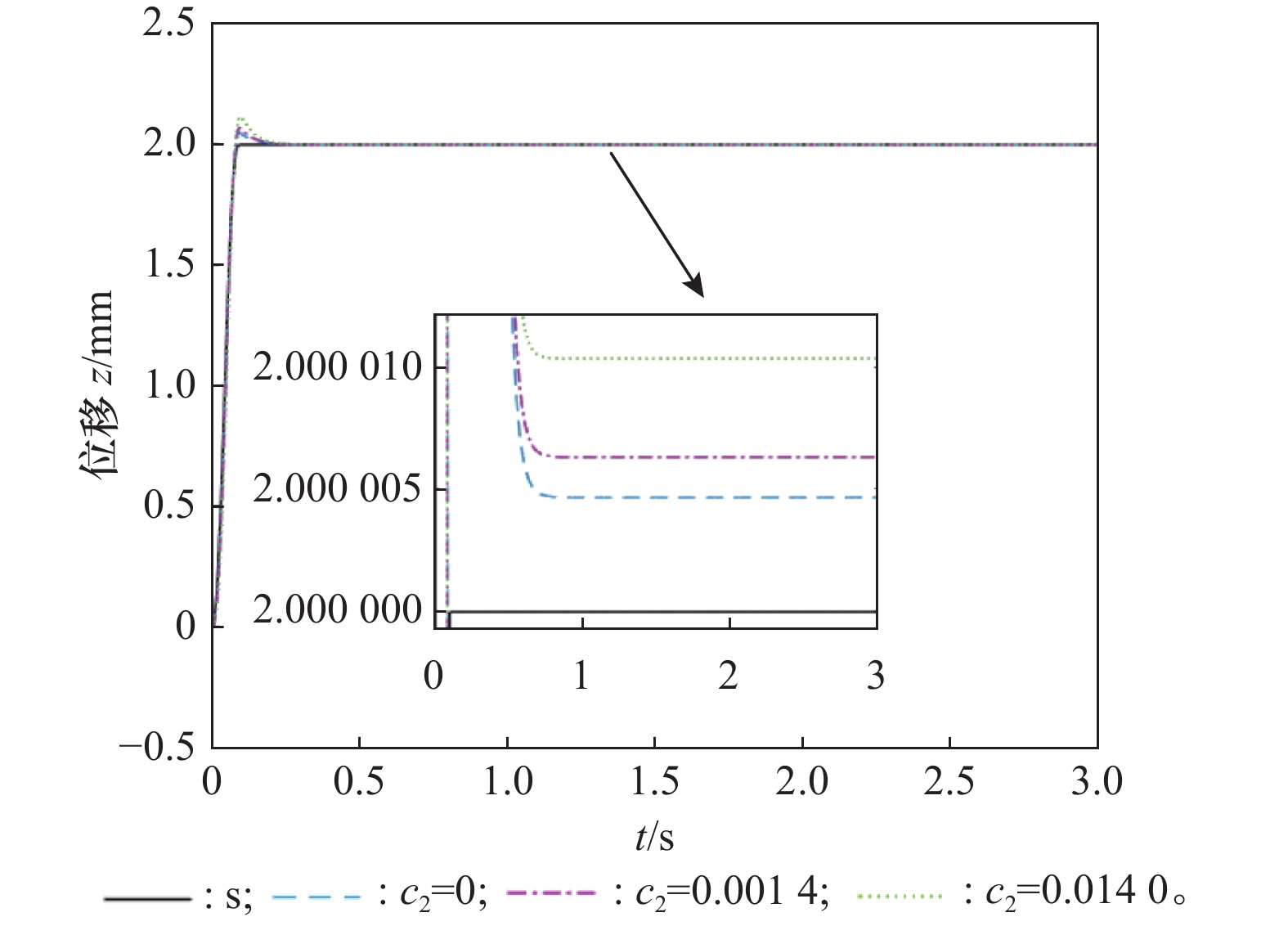
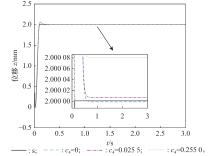
图9
不同悬浮力刚度系数下s型规划的位置响应曲线"
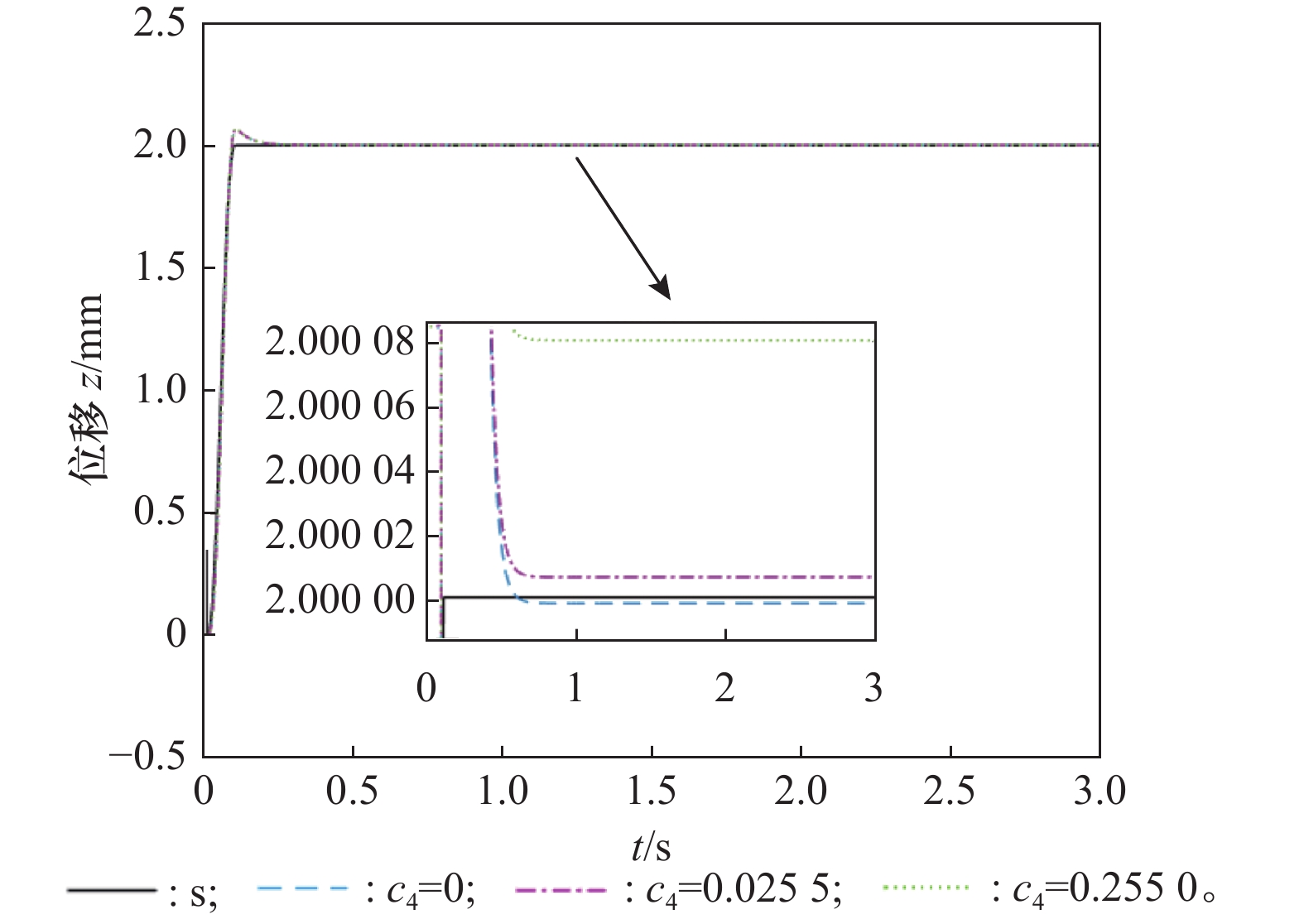
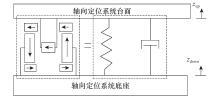
图10
UAPP串扰模型"
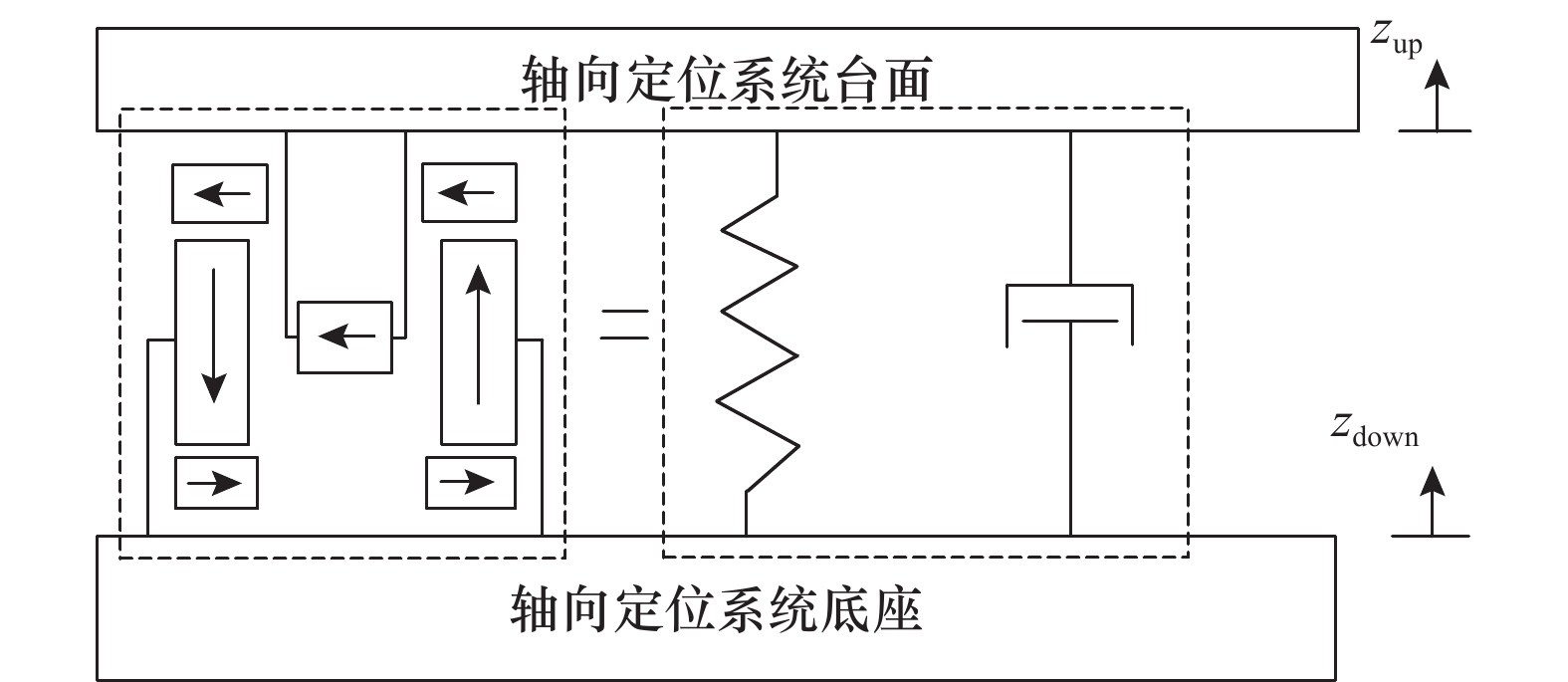
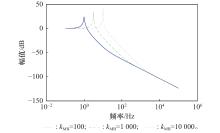
图11
不同悬浮力刚度下振动传递速率的波特图"
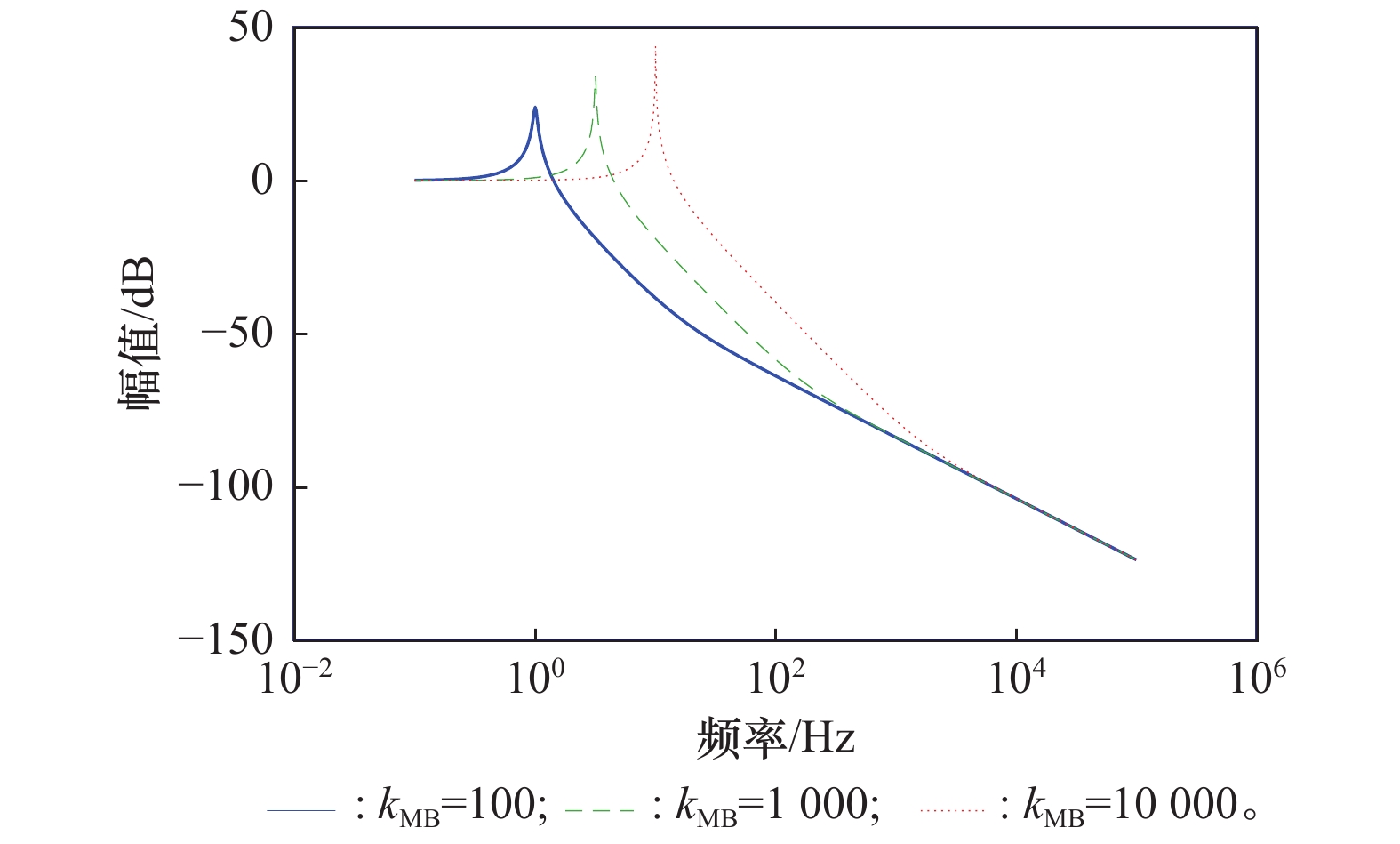

图12
UAPP的NAM-CNFADRC算法下总体框图"
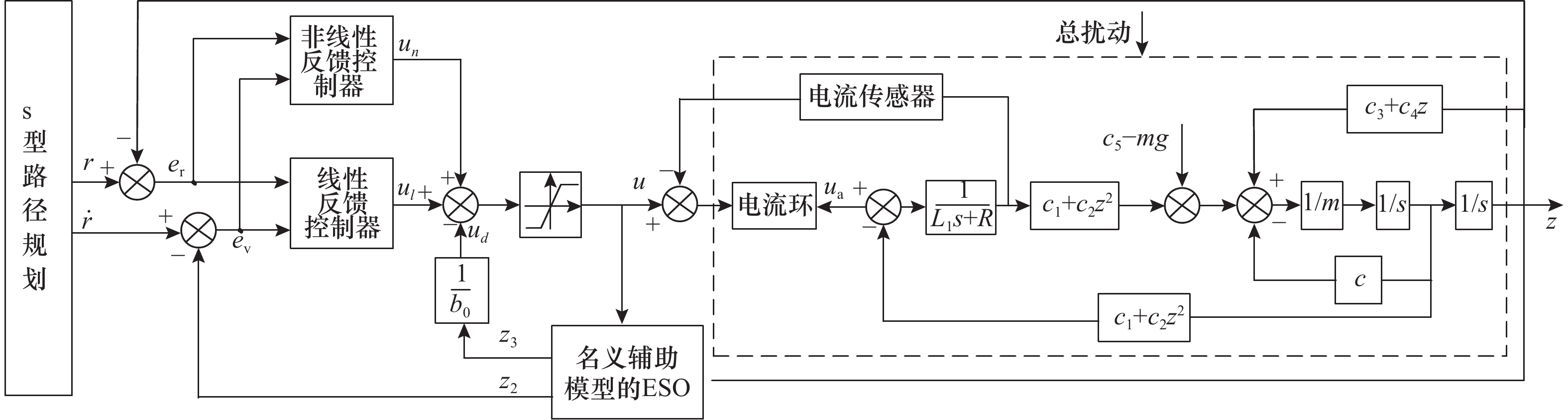
图13
3种控制方法s型规划指令的位置仿真曲线"
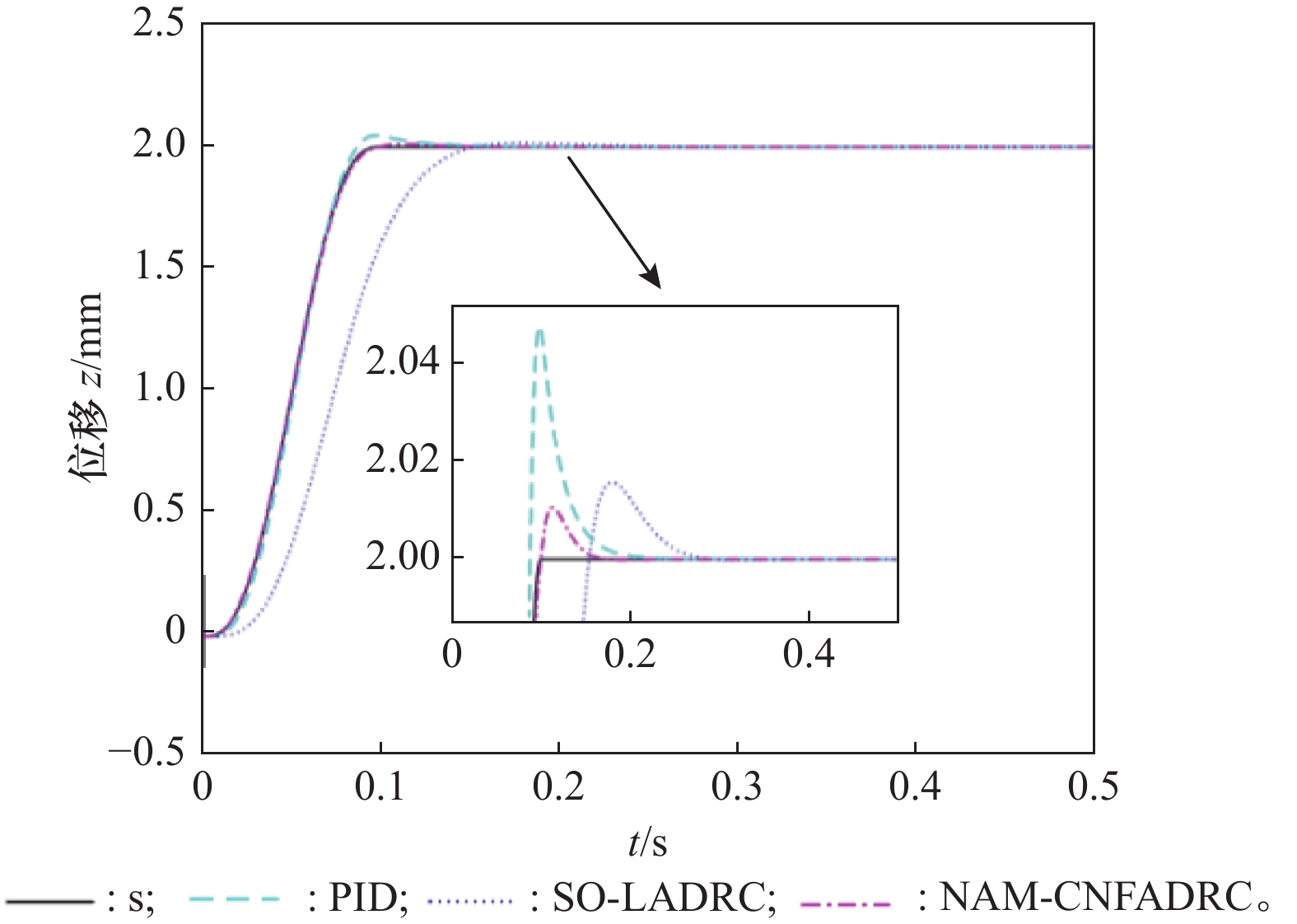
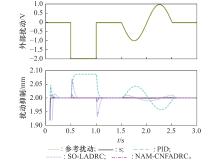
图14
3种控制方法下不同扰动的仿真结果"
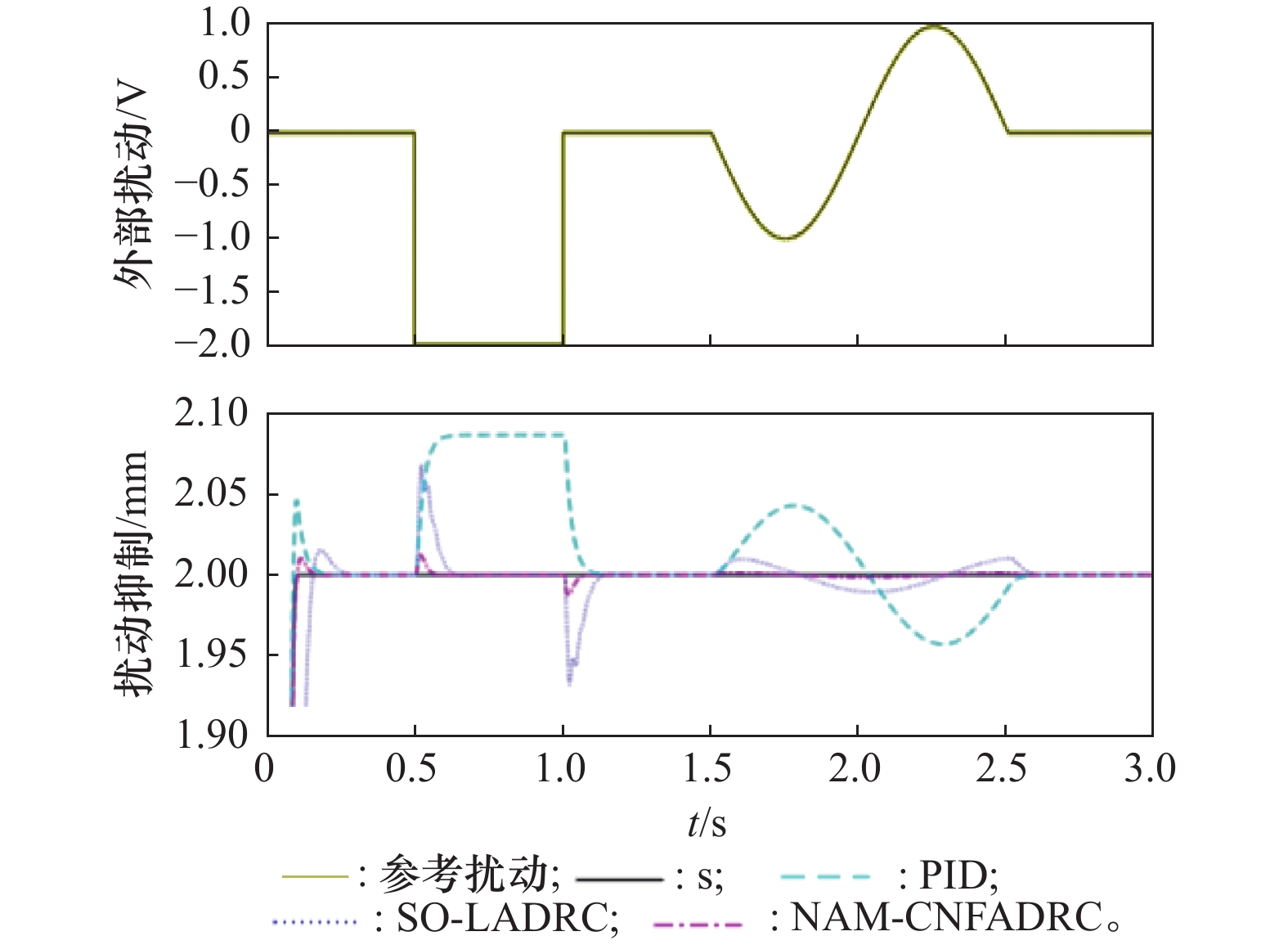

图15
FQPM-LFM和UEWH-MB力特性测试实验平台"
表1
FQPM-LFM、UEWH-MB结构参数和力特性系数"
| 方法 | 参数 | 取值 |
| FQPM-LFM | 推力常数c1/(N/A) | 2.07 |
| 系数c2/(N/(A·mm2)) | 0.002 | |
| 电阻R/Ω | 1.35 | |
| 电感L1/mH | 0.63 | |
| UEWH-MB | 悬浮力常数c5/N | 24.4 |
| 系数c3/(N/mm) | −0.012 | |
| 系数c4/(N/mm2) | 0.022 |
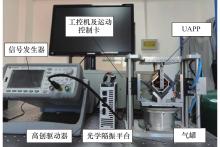
图16
UAPP实验平台"
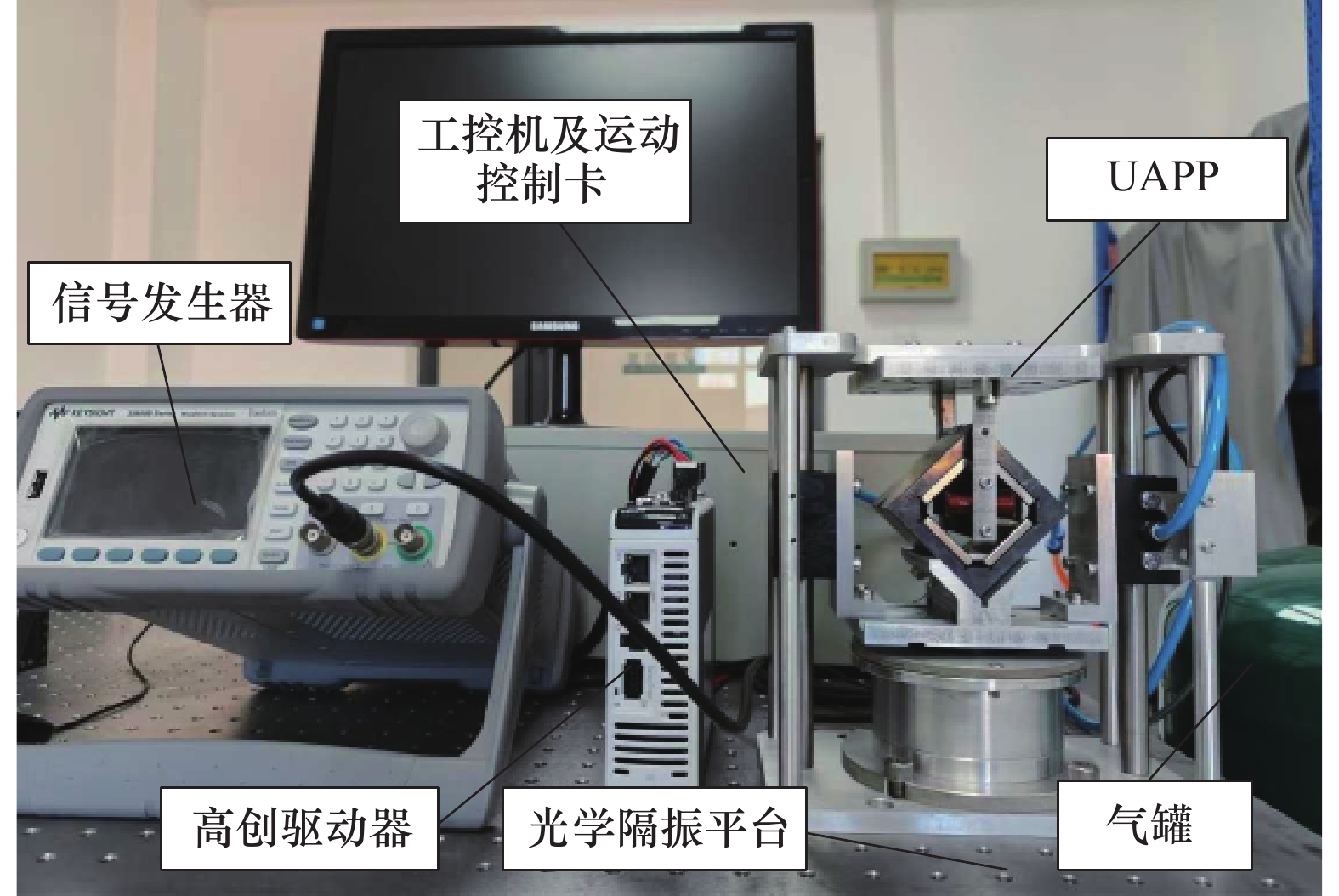
图17
3种控制方法下位置实验曲线"
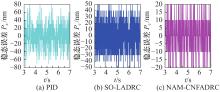
图18
3种控制方法下稳态误差实验曲线"
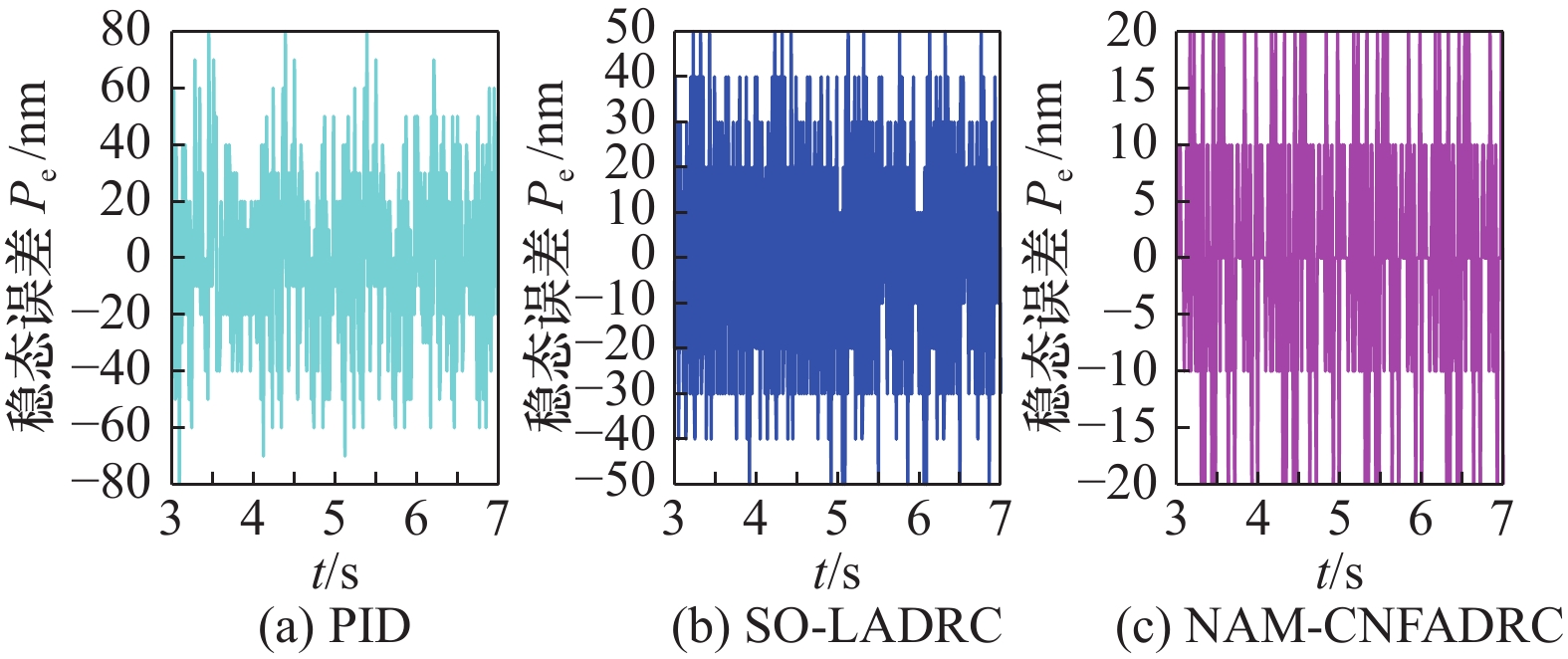
表2
3种控制方法的定位实验结果"
| 控制方法 | 定位性能 | ||
| Mp/μm | ts/s | Pemax/nm | |
| PID | 73 | 0.4 | ±80 |
| SO-LADRC | 17.5 | 0.5 | ±50 |
| NAM-CNFADRC | 14.9 | 0.28 | ±20 |
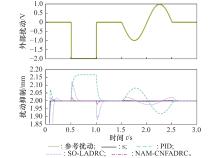
图19
3种控制方法下不同扰动的实验结果"
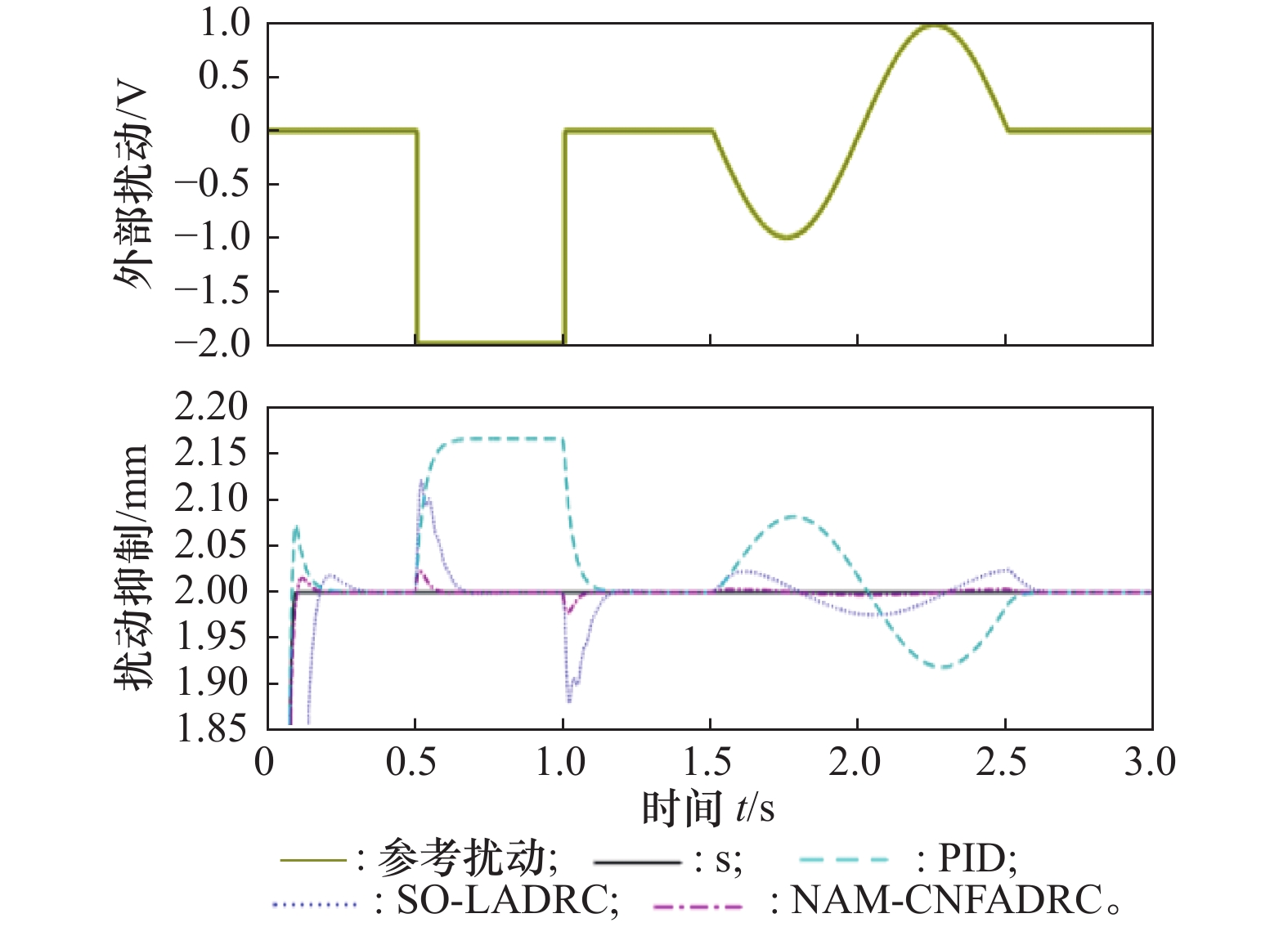
表3
3种控制方法对不同扰动作用的实验结果"
| 控制方法 | 阶跃扰动 | 正弦扰动 | |||
| MED/μm | STD/s | MED/μm | STD/s | ||
| PID | 166 | 0.85 | 80 | 1.3 | |
| SO-LADRC | 120 | 0.9 | 22 | 1.25 | |
| NAM-CNFADRC | 22.5 | 0.7 | 2.5 | 1.1 | |
| 1 | TANG J, YANG Y, DOU C H, et al. Micro-vibration control of spaceborne payload with smart parallel struts[J]. Mechanics of Advanced Materials and Structures, 2023, 31 (30): 12939- 12953. |
| 2 | 袁利, 姜甜甜, 魏春岭, 等. 空间控制技术发展与展望[J]. 自动化学报, 2023, 49 (3): 476- 493. |
| YUAN L, JIANG T T, WEI C L, et al. Advances and perspectives of space control technology[J]. Journal of Automation, 2023, 49 (3): 476- 493. | |
| 3 | LI Z C, GUO J L, QIN T, et al. Investigation on micro-vibration test and image stabilization of a high-precision space optical payload[J]. Applied Sciences, 2025, 15 (3): 1- 22. |
| 4 | CHATTERJEE A, MITRA S, KUMAR Y, et al. Free space optical interconnect for short range data transfer between imaging payload subsystems[C]// Proc. of the International Conference on Microwave, Optical, and Communication Engineering, 2023. |
| 5 | 孙洪雨, 张雷, 陈善搏, 等. 飞轮微振动的组合隔振装置设计及实验研究[J]. 宇航学报, 2020, 41 (10): 1288- 1294. |
| SUN H Y, ZHANG L, CHEN S B, et al. Design and experimental research of a combined vibration isolation device for flywheel micro-vibration[J]. Journal of Astronautics, 2020, 41 (10): 1288- 1294. | |
| 6 | 姜晓明, 王岩, 王程, 等. 鲁棒迭代学习控制及在高精密平台中的应用[J]. 系统工程与电子技术, 2013, 35 (3): 601- 608. |
| JIANG X M, WANG Y, WANG C, et al. Robust iterative learning control and its application to high precision test bench[J]. Journal of Systems Engineering and Electronics, 2013, 35 (3): 601- 608. | |
| 7 | FAN Y, SHUAI F, XUE Q C, et al. Effects of structural design on the performance of low-temperature co-fired multilayer piezoelectric ceramic actuators[J]. Materials Science and Engineering: B, 2025, 312, 1- 8. |
| 8 | QU L, WANG Y, HUANG Y. Establishment of rate-dependent hysteresis model and control method of piezoelectric ceramic actuator[C]// Proc. of the 7th International Conference on Electronics Technology, 2024: 587−592. |
| 9 |
BEN T, YIN B, CHEN L, et al. Lower vibration topology optimization for switched reluctance motor stator based on negative magnetostrictive material[J]. Power Electronics, 2025, 25, 909- 918.
doi: 10.1007/s43236-024-00933-y |
| 10 |
JIN H N, GAO X Y, REN K, et al. Review on piezoelectric actuators based on high-performance piezoelectric materials[J]. IEEE Trans. on Ultrasonics, Ferroelectrics, and Frequency Control, 2022, 69 (11): 3057- 3069.
doi: 10.1109/TUFFC.2022.3175853 |
| 11 |
CHEN X, LIU Y, ZHANG L Y, et al. Event-triggered adaptive control design with prescribed performance for macro-micro composite positioning stage[J]. IEEE Trans. on Industrial Electronics, 2021, 68 (10): 9963- 9971.
doi: 10.1109/TIE.2020.3020010 |
| 12 |
CHEN Z, LI C, YAO B, et al. Integrated coordinated/synchronized contouring control of a dual-linear-motor-driven gantry[J]. IEEE Trans. on Industrial Electronics, 2020, 67 (5): 3944- 3954.
doi: 10.1109/TIE.2019.2921287 |
| 13 | SONG Y, WANG J, YANG K, et al. A dual-stage control system for high-speed, ultra-precise linear motion[J]. International Journal of Advanced Manufacturing Technology, 2009, 48 (8): 633- 643. |
| 14 | 柴嘉伟, 贵献国. 音圈电机结构优化及应用综述[J]. 电工技术学报, 2021, 36 (6): 1113- 1125. |
| CHAI J W, GUI X G. Overview of structure optimization and application of voice coil motor[J]. Transaction of China Electrotechnical Society, 2021, 36 (6): 1113- 1125. | |
| 15 |
ZHANG L Y, GAO J, HE Y B, et al. A VCM active actuation method for bonding time reduction in chip packaging process[J]. IEEE Trans. on Industrial Electronics, 2021, 68 (8): 7252- 7262.
doi: 10.1109/TIE.2020.3020018 |
| 16 | 王彤. 磁浮重力补偿器构型参数化与优化设计[D]. 重庆: 重庆大学, 2022. |
| WANG T. Configuration parameterization and optimization design of a magnetic levitation gravity compensator[D]. Chongqing: Chongqing University, 2022. | |
| 17 | LOU Y, ZHANG H, CAI H, et al. A dual-layer mover magnetic levitation gravity compensator and method for its rapid analytical modeling[J]. IEEE Trans. on Instrumentation and Measurement, 2025, 74, 1- 10. |
| 18 |
ZHANG H, LOU Y, ZHOU L, et al. Modeling and optimization of a large-load magnetic levitation gravity compensator[J]. IEEE Trans. on Industrial Electronics, 2023, 70 (5): 5055- 5064.
doi: 10.1109/TIE.2022.3183365 |
| 19 |
LI L Y, PAN D H, HUANG X Z. Analysis and optimization of ironless permanent-magnet linear motor for improving thrust[J]. IEEE Trans. on Plasma Science, 2013, 41 (5): 1188- 1192.
doi: 10.1109/TPS.2013.2245425 |
| 20 |
ZHANG H, KOU B Q, ZHOU Y H. Analysis and design of a novel magnetic levitation gravity compensator with low passive force variation in a large vertical displacement[J]. IEEE Trans. on Industrial Electronics, 2020, 67 (6): 4797- 4805.
doi: 10.1109/TIE.2019.2924858 |
| 21 |
LIU Y C, GAO J, ZHONG Y, et al. Extended state observer-based IMC-PID tracking control of PMLSM servo systems[J]. IEEE Access, 2021, 9, 49036- 49046.
doi: 10.1109/ACCESS.2021.3068747 |
| 22 |
ZHANG H, KOU B C, GE Q, et al. Design and analysis of a high thrust linear voice coil motor using for the stiffness test of linear motor servo system[J]. IEEE Trans. on Magnetics, 2022, 58 (2): 1- 5.
doi: 10.1109/TMAG.2021.3140011 |
| 23 |
WANG B C, LIU C, WU Z W, et al. LCL filter design and implementation for improving transient position tracking control performance of voice coil motor[J]. IEEE Access, 2020, 8, 4963- 4971.
doi: 10.1109/ACCESS.2019.2963095 |
| 24 | ZHANG H, KOU B Q, JIN Y, et al. Modeling and analysis of a new cylindrical magnetic levitation gravity compensator with low stiffness for the 6-DOF fine stage[J]. IEEE Trans. on Industrial Electronics, 2015, 62 (6): 3629- 3639. |
| 25 | ZHOU Y C, KOU B Q, ZHANG H, et al. Force characteristic analysis of a linear magnetic bearing with rhombus magnet array for magnetic levitation positioning system[J]. IEEE Trans. on Magnetics, 2017, 53 (11): 1- 7. |
| 26 |
YUAN Y B, ZHANG K. Design of a robust guidance law via active disturbance rejection control[J]. Journal of Systems Engineering and Electronics, 2015, 26 (2): 353- 358.
doi: 10.1109/JSEE.2015.00041 |
| 27 |
ZHOU R, FU C F, TAN W. Implementation of linear controllers via active disturbance rejection control structure[J]. IEEE Trans. on Industrial Electronics, 2021, 68 (7): 6217- 6226.
doi: 10.1109/TIE.2020.2992951 |
| 28 | 莫昱, 唐旭东. 基于改进自抗扰控制的电动伺服系统机械谐振抑制方法[J]. 系统工程与电子技术, 2024, 46 (1): 309- 317. |
| MO Y, TANG X D. Research on mechanical resonance suppression of electric servo system based on an improved ADRC[J]. Systems Engineering and Electronics, 2024, 46 (1): 309- 317. | |
| 29 |
GUO B, JIN F. Sliding mode and active disturbance rejection control to stabilization of one-dimensional anti-stable wave equations subject to disturbance in boundary input[J]. IEEE Trans. on Automatic Control, 2013, 58 (5): 1269- 1274.
doi: 10.1109/TAC.2012.2218669 |
| 30 |
LIU J, WANG J. Active disturbance rejection control and sliding mode control of one-dimensional unstable heat equation with boundary uncertainties[J]. IMA Journal of Mathematical Control and Information, 2015, 32 (1): 97- 117.
doi: 10.1093/imamci/dnt034 |
| 31 | LIN H, YAN L, SHI C, et al. Comparative study of active disturbance rejection control methods for PMSM systems[C]//Proc. of the 43rd Chinese Control Conference, 2024: 2744-2749. |
| 32 | ZHAI Y G, ZHOU H C. Active disturbance rejection control and disturbance observer-based control approach to 1-d flexible string system[C]//Proc. of the 40th Chinese Control Conference, 2021: 855-860. |
| 33 | 刘亚超. 面向大行程宏微精密运动平台的直线电机自抗扰控制方法研究与实验[D]. 广州: 广东工业大学, 2021. |
| LIU Y C. Research and experiment on active disturbance rejection control method for linear motor of macro-micro motion platform with large stroke[D]. Guangzhou: Guangdong University of Technology, 2021. |
| [1] | 邓柏海, 徐锦法. 复合式无人直升机姿态控制半物理仿真验证[J]. 系统工程与电子技术, 2025, 47(2): 608-620. |
| [2] | 冯建鑫, 李昊阳, 巩建雄, 龚柏春. 基于改进鲸鱼优化算法的超声电机自抗扰控制[J]. 系统工程与电子技术, 2025, 47(12): 4166-4173. |
| [3] | 赵昱宇, 索超, 王雨潇. 基于微分平坦的高超声速飞行器跟踪控制方法[J]. 系统工程与电子技术, 2024, 46(3): 1084-1092. |
| [4] | 莫昱, 唐旭东. 基于改进自抗扰控制的电动伺服系统机械谐振抑制方法[J]. 系统工程与电子技术, 2024, 46(1): 309-317. |
| [5] | 杨文奇, 卢建华, 姜旭, 王元鑫. 基于改进ESO的四旋翼姿态自抗扰控制器设计[J]. 系统工程与电子技术, 2022, 44(12): 3792-3799. |
| [6] | 冯建鑫, 王雅雷, 王强, 胥彪. 基于改进粒子群算法的快速反射镜自抗扰控制[J]. 系统工程与电子技术, 2021, 43(12): 3675-3682. |
| [7] | 杨立本, 魏文军, 杨剑锋, 李泰国, 王栋. 横列式双旋翼矢量飞行器的改进ADRC姿态控制算法[J]. 系统工程与电子技术, 2021, 43(10): 2976-2983. |
| [8] | 王彪, 唐超颖, 姚振楠. 基于串级LADRC设计的旋翼无人机航迹跟踪控制[J]. 系统工程与电子技术, 2019, 41(6): 1358-1365. |
| [9] | 王青, 刘雨昂, 刘晨, 董朝阳. 基于扩张状态观测器的变形机翼抗饱和控制[J]. 系统工程与电子技术, 2019, 41(3): 619-625. |
| [10] | 郭亭亭, 宋大雷, 李娟, 臧文川. 大排量水下滑翔机建模与扰动抑制方法[J]. 系统工程与电子技术, 2019, 41(12): 2855-2863. |
| [11] | 张勇, 陈增强, 张兴会, 孙明玮, 孙青林. 四旋翼无人机系统PD-ADRC串级控制[J]. 系统工程与电子技术, 2018, 40(9): 2055-2061. |
| [12] | 赵坤, 曹登庆, 黄文虎. 突防导弹机动、制导与控制一体化设计[J]. 系统工程与电子技术, 2018, 40(9): 2040-2047. |
| [13] | 肖支才, 程春华. 具有不可测动态不确定性非线性系统的控制[J]. 系统工程与电子技术, 2016, 38(4): 909-914. |
| [14] | 邓志红, 蔡山波, 王博, 付梦印. 一种旋转调制惯导系统的复合旋转控制算法[J]. 系统工程与电子技术, 2016, 38(11): 2610-2616. |
| [15] | 董朝阳, 程昊宇, 王青. 基于自抗扰的反步滑模制导控制一体化设计[J]. 系统工程与电子技术, 2015, 37(7): 1604-1610. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||