Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (8): 2829-2840.doi: 10.12305/j.issn.1001-506X.2024.08.30
• Guidance, Navigation and Control • Previous Articles
Formation control of unmanned surface vehicle swarm in dense environment based on local perception
Hao LIU1,2, Yunfei ZHANG1,*, Jicheng ZHAO1
- 1. Yunzhou Intelligent Technology Co., Ltd., Zhuhai 519082, China
2. Shenzhen Research Institute, Yunzhou Innovation Technology Co., Ltd., Shenzhen 518106, China
-
Received:2023-01-31Online:2024-07-25Published:2024-08-07 -
Contact:Yunfei ZHANG
CLC Number:
Cite this article
Hao LIU, Yunfei ZHANG, Jicheng ZHAO. Formation control of unmanned surface vehicle swarm in dense environment based on local perception[J]. Systems Engineering and Electronics, 2024, 46(8): 2829-2840.
share this article
Table 1
Overall execution flow of algorithm"
| 阶段 | 触发条件 | 调用模块 | 预期结果 |
| 初始状态 | 从母艇释放 | 无 | 集群全部脱离母艇 |
| 组队阶段 | 各艇间距差异过大 | 自组队形算法 | 组成“蜂窝式”队形 |
| 行进阶段 | 队形组建成功 | 目标、方向、航速控制器 | 固定队形向目标行进 |
| 避障阶段 | 集群内某艇感知到障碍 | 障碍艇: 细菌游走避障算法、目标控制器; 其他艇:航速、航向控制器 | 最大化生存率条件下通过障碍 |
| 队形恢复阶段 | 集群内各艇感知不到障碍 | 自组队形算法 | 恢复“蜂窝式”队形 |
| 行进阶段 | 队形组建成功 | 目标、方向、航速控制器 | 固定队形向目标行进 |
| 收队阶段 | 收到“收队”指令 | 目标控制器 | 集群回归母艇 |

Fig.1
Flowchart of overall algorithm"


Fig.2
Schematic diagram of SGTC bypass obstacle avoidance"
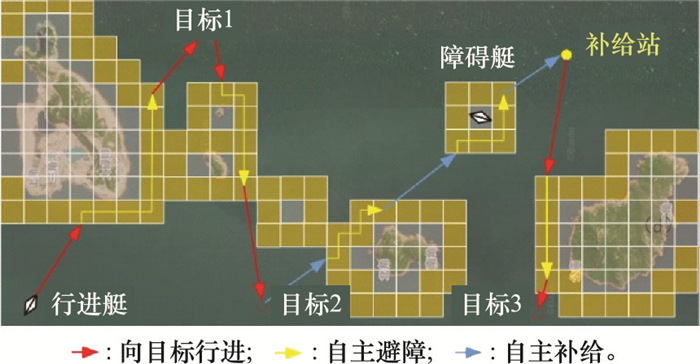

Fig.3
Flowchart of bacterial walking obstacle avoidance algorithm"


Fig.4
Collecting examples of 3×3 grid collection"


Fig.5
Self-organizing formation generation process"


Fig.6
"Self-organizing formation moving target" generation example"


Fig.7
Flowchart of self-organizing formation algorithm"


Fig.8
Phase division diagram of swarm's dense environment crossing"


Fig.9
State of the swarm's dense environment crossing at each moment"


Fig.10
Trajectory of each stage of dense environment crossing"


Fig.11
Variation of controller parameters in the group marching stage"


Fig.12
Variation of controller parameters in the dense environment crossing stage"
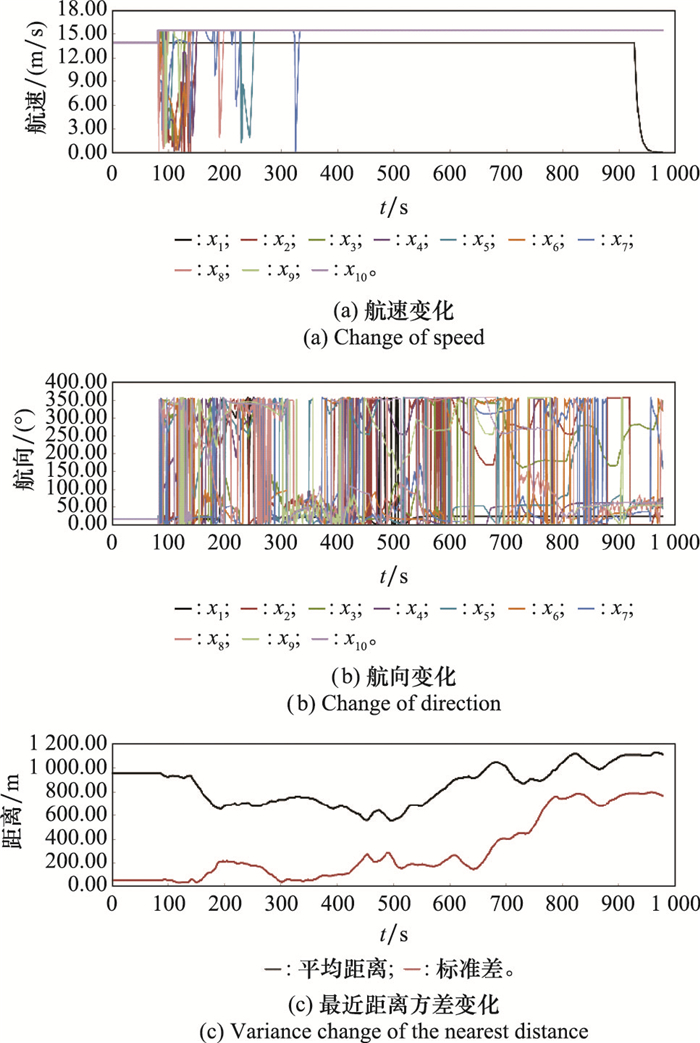

Fig.13
Variation of controller parameters in formation recovery stage"

Table 2
Corresponding control model of similar algorithms"
| 对比算法 | 对比控制模型 |
| NSGAIII | RSCMTP模型[ |
| MOEA/D | Reynolds模型[ |
| NSGAII | APF(Kala)模型[ |
| SPEA2 | APF(Yang)模型[ |

Fig.14
Trajectories comparison of multi-obstacle scene crossing by similar methods"

| 1 |
张婷婷, 蓝羽石, 宋爱国.无人集群系统自主协同技术综述[J].指挥与控制学报,2021,7(2):127-136.
doi: 10.3969/j.issn.2096-0204.2021.02.0127 |
|
ZHANG T T , LAN Y S , SONG A G .An overview of autonomous collaboration technologies for unmanned swarm systems[J].Journal of Command and Control,2021,7(2):127-136.
doi: 10.3969/j.issn.2096-0204.2021.02.0127 |
|
| 2 | 黄长强, 翁兴伟, 王勇, 等.多无人机协同作战技术[M].北京: 国防工业出版社,2012. |
| HUANG C Q , WENG X W , WANG Y , et al.Cooperative combat technology for multi-UAVs[M].Beijing: National Defense Industry Press,2012. | |
| 3 |
王原, 邢立宁, 陈盈果, 等.基于多目标优化的自组织无人机集群航迹规划方法[J].指挥与控制学报,2021,7(3):257-268.
doi: 10.3969/j.issn.2096-0204.2021.03.0257 |
|
WANG Y , XING L N , CHEN Y G , et al.Path planning method of self-organizing UAV swarm based on multi-objective optimization[J].Journal of Command and Control,2021,7(3):257-268.
doi: 10.3969/j.issn.2096-0204.2021.03.0257 |
|
| 4 | 贾高伟, 王建峰.无人机集群任务规划方法研究综述[J].系统工程与电子技术,2021,43(1):105-117. |
| JIA G W , WANG J F .Research review of UAV swarm mission planning method[J].System Engineering and Electronics,2021,43(1):105-117. | |
| 5 |
REYNOLDS C W .Flocks, herds, and schools: a distributed behavioral model[J].Computer Graphics,1987,21(4):25-34.
doi: 10.1145/37402.37406 |
| 6 |
TONER J , TU Y .Flocks, herds, schools: a quantitative theory of flocking[J].Physical Review E,1998,58(4):4828-4832.
doi: 10.1103/PhysRevE.58.4828 |
| 7 | COUZIN I D , KRAUSE J , JAMES R , et al.Collective memory and spatial sorting in animal groups[J].Journal of Theoretical Biology,2002,218(1):1023-1030. |
| 8 |
VICSEK T , CZIRÓK A , BEN-JACOB E , et al.Novel type of phase transition in a system of self-driven particles[J].Physical Review Letters,1995,75(6):1226-1235.
doi: 10.1103/PhysRevLett.75.1226 |
| 9 |
张超省, 王健, 张林, 等.面向复杂障碍场的多智能体系统集群避障模型[J].兵工学报,2021,42(1):141-150.
doi: 10.3969/j.issn.1000-1093.2021.01.016 |
|
ZHANG C S , WANG J , ZHANG L , et al.A multi-agent system flocking model with obstacle avoidance in complex obstacle field[J].Acta Armamentarii,2021,42(1):141-150.
doi: 10.3969/j.issn.1000-1093.2021.01.016 |
|
| 10 | KWONG H, JACOB C. Evolutionary exploration of dynamic swarm behavior[C]//Proc. of the IEEE Congress on Evolutionary Computation, 2003: 367-374. |
| 11 | WANG L, SHI H, CHU T G. Flocking control of groups of mobile autonomous agents via local feedback[C]//Proc. of the IEEE International Symposium on Intelligent Control, 2005: 441-446. |
| 12 |
CUCKER F , SMALE S .Emergent behavior in flocks[J].IEEE Trans.on Automatic Control,2007,52(5):852-862.
doi: 10.1109/TAC.2007.895842 |
| 13 | CAVAGNA A , GIARDINA I , GRIGERA T S , et al.Silent flocks: constraints on signal propagation across biological groups[J].Physical Review Letters,2015,114(21):1278-1286. |
| 14 | HEREFORD J, BLUM C. FlockOpt: a new swarm optimization algorithm based on collective behavior of starlingbirds[C]//Proc. of the 3rd World Congress on Nature and Biologically Inspired Computing, 2011: 17-22. |
| 15 |
KHATIB O .Real-time obstacle avoidance for manipulators and mobile robots[J].International Journal of Robotics Research,1986,5(1):90-98.
doi: 10.1177/027836498600500106 |
| 16 |
FIORINI P , SHILLER Z .Motion planning in dynamic environments using velocity obstacles[J].International Journal of Robotics Research,1998,17(7):760-772.
doi: 10.1177/027836499801700706 |
| 17 | SANTOS V , CAMPOS M , CHAIMOWICZ L .On segregative behaviors using flocking and velocity obstacles[J].Springer Tracts in Advanced Robotics,2014,104(3):121-133. |
| 18 | WOODS A, LA H. Dynamic target tracking and obstacle avoidance using a drone[C]//Proc. of the International Symposium on Visual Computing: Advances in Visual Computing, 2015: 857-866. |
| 19 | HARDER S .Formation specification for control of active agents using artificial potential fields[J].Journal of Intelligent & Robotic Systems,2019,95(2):279-290. |
| 20 | 郭褚冰, 张锴, 张永平.基于生物智能的无人集群协同控制[J].指挥与控制学报,2021,7(1):76-82. |
| GUO C B , ZHANG K , ZHANG Y P .Unmanned swarm coope- rative control based on biological intelligence[J].Journal of Command and Control,2021,7(1):76-82. | |
| 21 | MITCHELL M .An introduction to genetic algorithms[J].Principles of Adaptive Filters and Self-learning Systems,1998,24(4):325-336. |
| 22 | KENNEDY J, EBERHART R. Particle swarm optimization[C] //Proc. of IEEE International Conference on Neural Networks, 1995: 1942-1948. |
| 23 | DORIGO M. Optimization, learning and natural algorithms[D]. Milano: Politecnico di Milano, 1992. |
| 24 | 谢榕, 顾村锋.一种欧椋鸟群协同算法[J].武汉大学学报(理学版),2019,65(3):229-237. |
| XIE R , GU C F .A starling swarm coordination algorithm[J].Journal of Wuhan University (Science Edition),2019,65(3):229-237. | |
| 25 | REYNOLDS C .Flocks, herds and schools: a distributed behavioral model[J].ACM Siggraph Computer Graphics,1987,21(4):25-34. |
| 26 | KALA R. Code for robot path planning using artificial potential fields[EB/OL]. [2022-10-26]. http://rkala.in/codes.html. |
| 27 | YANG Y, LIU M Y, CUI H Y, et al. Research on formation behavior off lock with visual guidance algorithm[C]//Proc. of the IEEE International Conference on Robotics and Biomimetics, 2018: 2360-2365. |
| [1] | Xiantao SUN, Wangyang JIANG, Wenjie CHEN, Weihai CHEN, Yali ZHI. Object grasp pose detection based on the region of interest [J]. Systems Engineering and Electronics, 2024, 46(6): 1867-1877. |
| [2] | Chang CAI, Jianfeng CHEN, Qingli YAN, Fen LIU. Discrete area partitioning method considering special regions [J]. Systems Engineering and Electronics, 2024, 46(5): 1656-1664. |
| [3] | Hang LI, Yanpeng HOU, Wusheng CHOU, Lingda MENG. Design and experimental study of teleoperation system for emergency response in nuclear accident [J]. Systems Engineering and Electronics, 2024, 46(5): 1607-1618. |
| [4] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [5] | Wanyan HUANG, Wanhe DU, Shuzhen YANG, Tao YU. Trajectory prediction algorithm based on improved polynomial curve fitting [J]. Systems Engineering and Electronics, 2024, 46(1): 280-289. |
| [6] | Jingyu WU, Shiqiang ZHU, Wei SONG, Haolei SHI, Zenan WU. Coverage path planning based on improved cellular decomposition [J]. Systems Engineering and Electronics, 2023, 45(12): 3949-3957. |
| [7] | Ying ZENG, Yanfeng LI, Hongyi WANG, Huaming QIAN, Hongzhong HUANG. Reliability analysis of industrial robot driver combining MRGP and PSO [J]. Systems Engineering and Electronics, 2023, 45(8): 2643-2650. |
| [8] | Qian SU, Yuanfu ZHONG, Zhiqin CAO, Yingchao ZHANG. Target threat assessment model based on operational situation and improved CRITIC-TOPSIS [J]. Systems Engineering and Electronics, 2023, 45(8): 2343-2352. |
| [9] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| [10] | Keke LU, Chao WANG, Junfeng WU, Feng QIAN. Visual-inertial odometry based on exposure controlled by gradient information [J]. Systems Engineering and Electronics, 2023, 45(5): 1496-1502. |
| [11] | Kaifeng CHEN, Borui TIAN, Heqing LI, Chenyang ZHAO, Zuxing LU, Xinde LI, Yong DENG. Research on DDPG-based motion control of two-wheel-legged robot [J]. Systems Engineering and Electronics, 2023, 45(4): 1144-1151. |
| [12] | Haojie ZHANG, Yudong ZHANG, Rongmin LIANG, Tiantian YANG. Energy-efficient path planning method for robots based on improved A* algorithm [J]. Systems Engineering and Electronics, 2023, 45(2): 513-520. |
| [13] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [14] | Yongqi GAO, Weiqiang MA, Linsen ZHANG, Peng WANG, Miao ZHAO. Distributed multi-AUVs cooperative search method [J]. Systems Engineering and Electronics, 2022, 44(5): 1670-1676. |
| [15] | Wengang LI, Liujiang WANG, Dexiang FANG, Yuwei LI, Jun Huang. Path planning algorithm combining A* with DWA [J]. Systems Engineering and Electronics, 2021, 43(12): 3694-3702. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||