Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (5): 1607-1618.doi: 10.12305/j.issn.1001-506X.2024.05.15
• Systems Engineering • Previous Articles
Design and experimental study of teleoperation system for emergency response in nuclear accident
Hang LI, Yanpeng HOU, Wusheng CHOU, Lingda MENG
- School of Mechanical Engineering & Automation, Beihang University, Beijing 100191, China
-
Received:2022-12-07Online:2024-04-30Published:2024-04-30 -
Contact:Hang LI
CLC Number:
Cite this article
Hang LI, Yanpeng HOU, Wusheng CHOU, Lingda MENG. Design and experimental study of teleoperation system for emergency response in nuclear accident[J]. Systems Engineering and Electronics, 2024, 46(5): 1607-1618.
share this article

Fig.1
Composition of the teleoperation system"
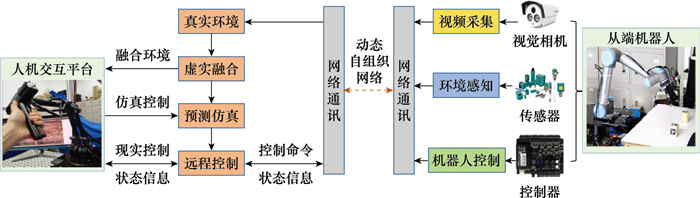

Fig.2
Series six degree of freedom master manipulator"
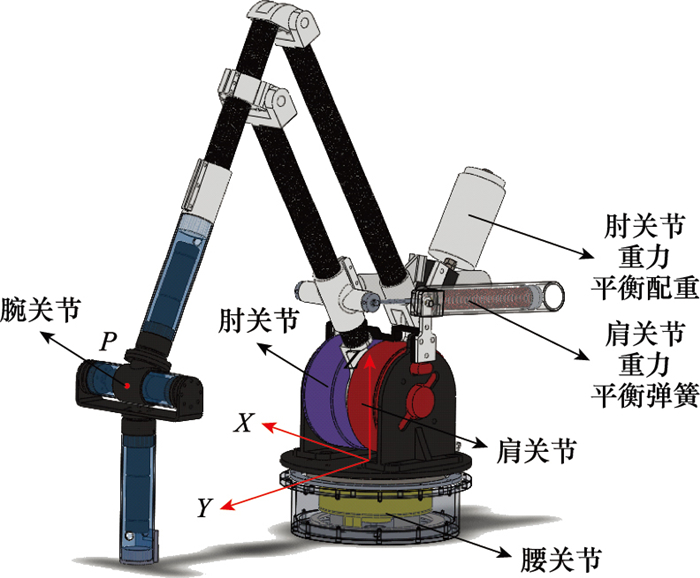
Table 1
Key parameters of master manipulator"
| 项目 | 参数 |
| 最大持续反馈力/N | 5.56 |
| 最大反馈力矩/Nm | 0.43 |
| 直线分辨率/mm | 1.02 |
| 角度分辨率/rad | 5.29e-05 |
| 工作空间/mm3 | >200×200×200 |
| 重量/kg | 15.78 |
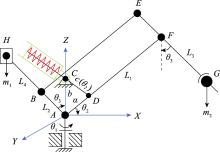
Fig.3
Schematic diagram of master manipulator"
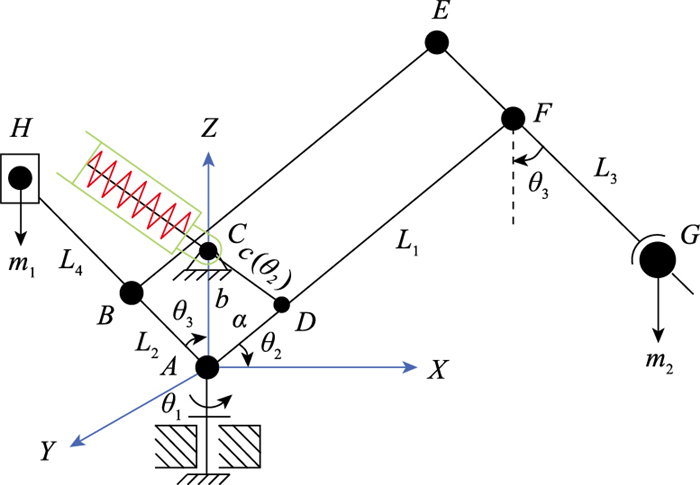
Fig.4
Gravity compensation effect of master manipulator"

Fig.5
Dynamic ad-hoc network scheme"
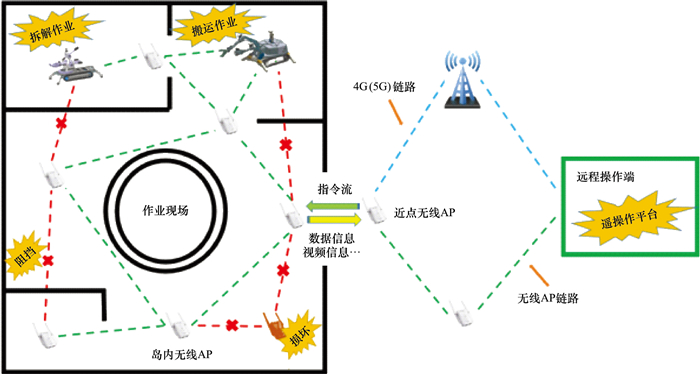
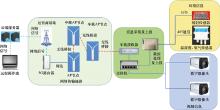
Fig.6
Dynamic ad-hoc network framework"
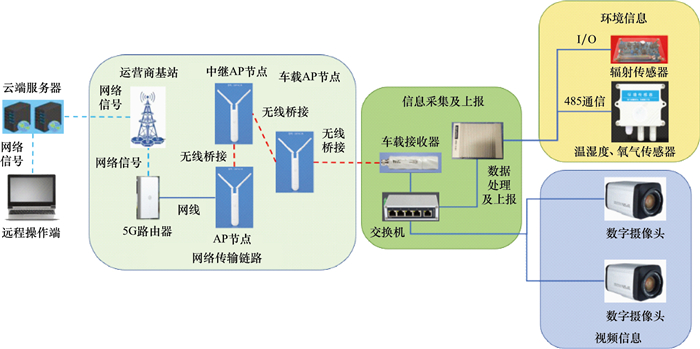

Fig.7
Topology diagram of AP node chain networking"

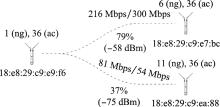
Fig.8
Topology diagram of AP node Mesh networking"
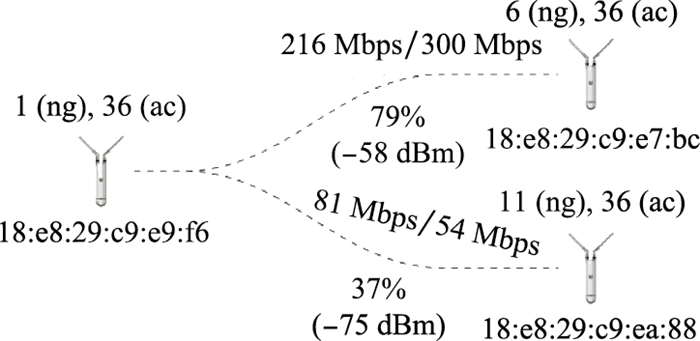
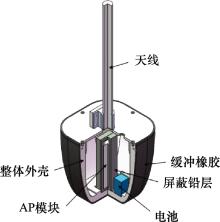
Fig.9
Radiation-resistant encapsulation of AP node"
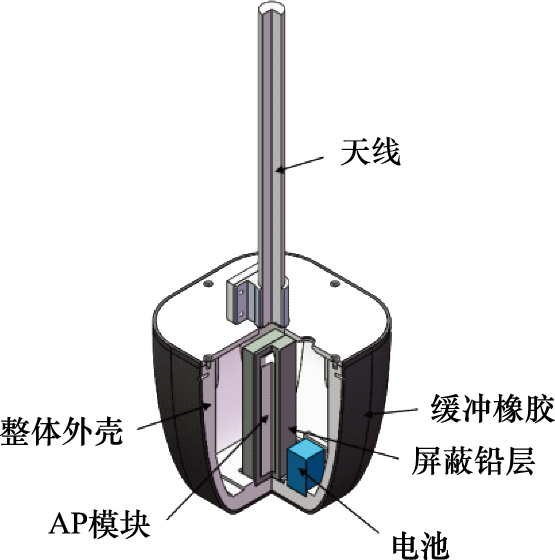
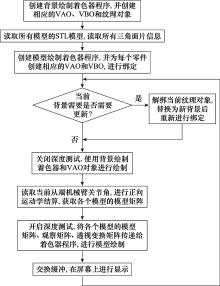
Fig.10
Flowchat of virtual interaction superposition system"
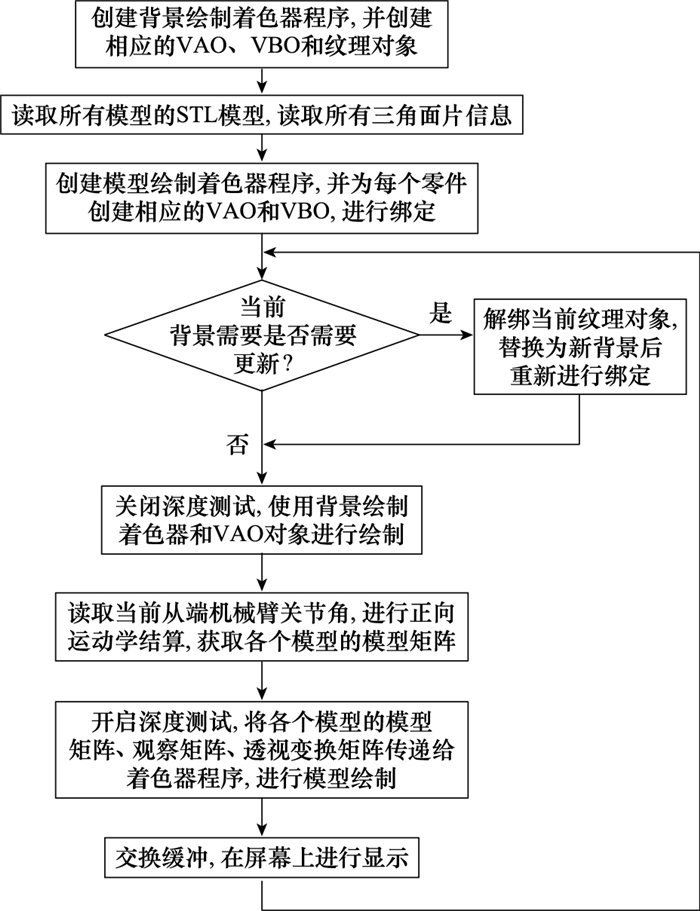
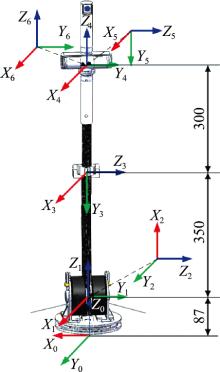
Fig.11
DH coordinate system of master manipulator"
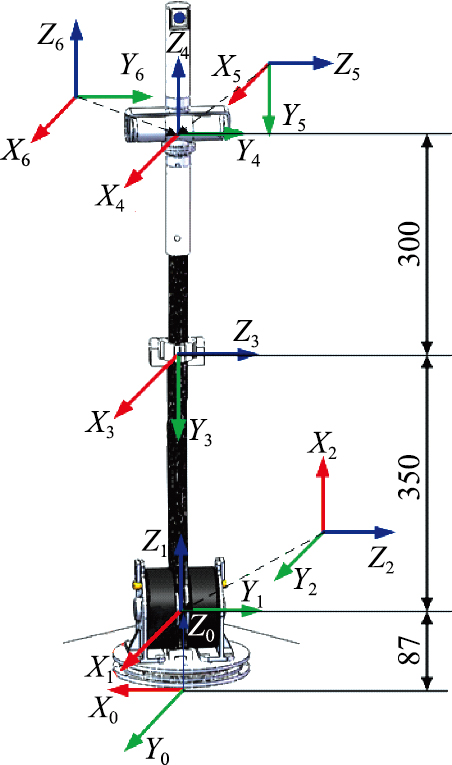
Table 2
DH parameters of master manipulator"
| 关节i | αi-1/(°) | ai-1/m | di/m | θi/(°) |
| 1 | 0 | 0 | l1 | 90+θ1 |
| 2 | -90 | 0 | 0 | -90+θ2 |
| 3 | 0 | l2 | 0 | 90+θ3 |
| 4 | 90 | 0 | l34 | θ4 |
| 5 | -90 | 0 | 0 | θ5 |
| 6 | 90 | 0 | 0 | θ6 |
Fig.12
Layout diagram of teleoperation system"
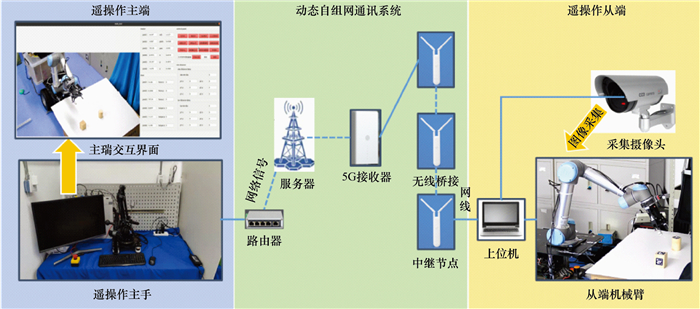
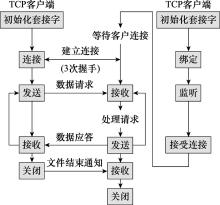
Fig.13
Network performance test procedure"
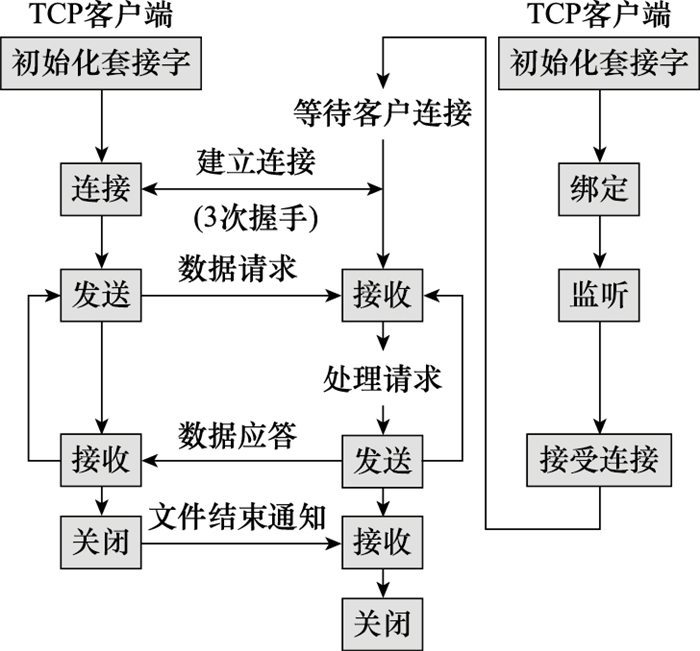
Table 3
Communication rate of AP under different conditions"
| 距离 | 数据类型 | 局域网 | 5G | |||||||
| 数据1 | 数据2 | 数据3 | 平均值 | 数据1 | 数据2 | 数据3 | 平均值 | |||
| 0 m无AP | 上传/Mbps | - | - | - | - | 6.39 | 6.50 | 7.72 | 6.87 | |
| 下载/Mbps | - | - | - | - | 65.41 | 67.37 | 56.78 | 63.19 | ||
| 时延/ms | - | - | - | - | 28.00 | 40.00 | 20.00 | 29.33 | ||
| 0 m双AP | 上传/Mbps | 174.00 | 171.00 | 172.00 | 172.33 | 7.97 | 8.70 | 8.12 | 8.26 | |
| 下载/Mbps | 174.00 | 171.00 | 172.00 | 172.33 | 60.07 | 55.96 | 63.30 | 59.78 | ||
| 时延/ms | 1.00 | 1.00 | 1.00 | 1.00 | 29.00 | 23.00 | 24.00 | 25.33 | ||
| 65 m双AP | 上传/Mbps | 97.70 | 103.00 | 99.90 | 100.20 | 8.02 | 7.85 | 7.93 | 7.93 | |
| 下载/Mbps | 97.70 | 103.00 | 99.90 | 100.20 | 55.43 | 57.81 | 56.43 | 56.56 | ||
| 时延/ms | 2.00 | 3.00 | 2.00 | 2.33 | 28.00 | 24.00 | 26.00 | 26.00 | ||
| 130 m 3AP 自由组网 | 上传/Mbps | 55.80 | 56.40 | 56.50 | 56.23 | 7.47 | 8.03 | 7.33 | 7.61 | |
| 下载/Mbps | 55.80 | 56.40 | 56.50 | 56.23 | 55.76 | 51.83 | 54.55 | 54.05 | ||
| 时延/ms | 3.00 | 3.00 | 2.00 | 2.67 | 24.00 | 29.00 | 24.00 | 25.67 | ||
| 130 m 3AP 链式组网 | 上传/Mbps | 43.20 | 45.30 | 43.10 | 43.87 | 7.29 | 8.41 | 7.65 | 7.78 | |
| 下载/Mbps | 43.20 | 45.30 | 43.10 | 43.87 | 53.75 | 53.22 | 52.45 | 53.14 | ||
| 时延/ms | 3.00 | 3.00 | 2.00 | 2.67 | 29.00 | 26.00 | 71.00 | 42.00 | ||
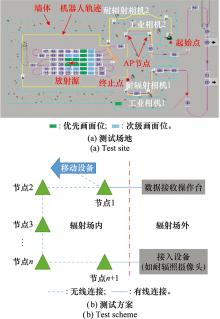
Fig.14
Lagout of nuclear radiation site test scheme"
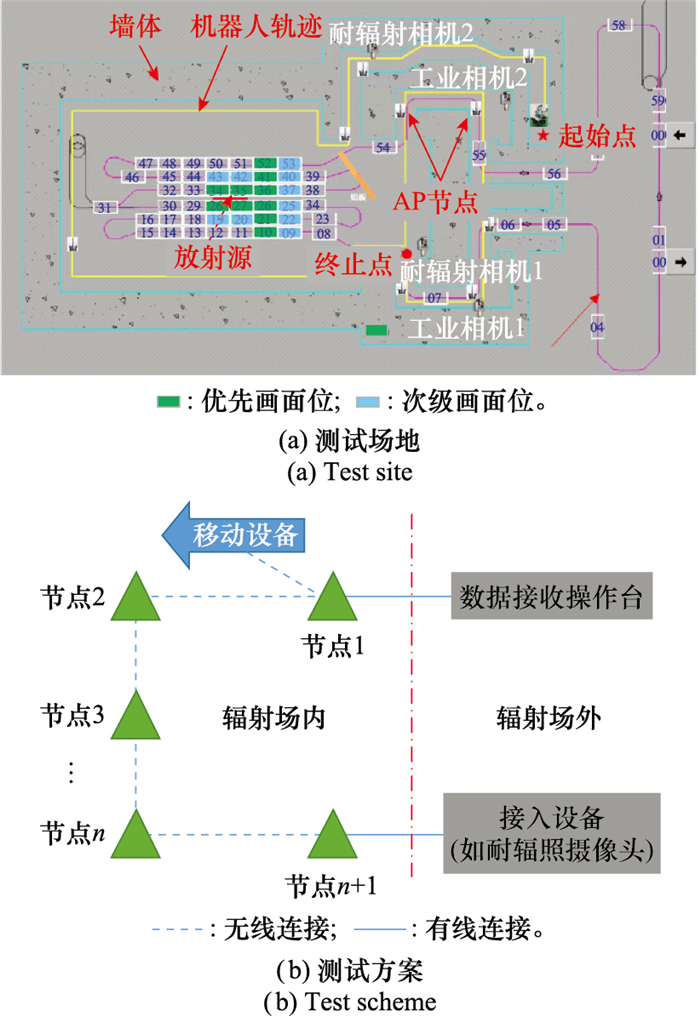
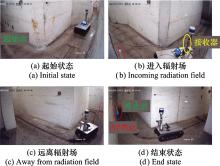
Fig.15
Bridging situation between slave and ad-hoc network at different positions in the experiment"
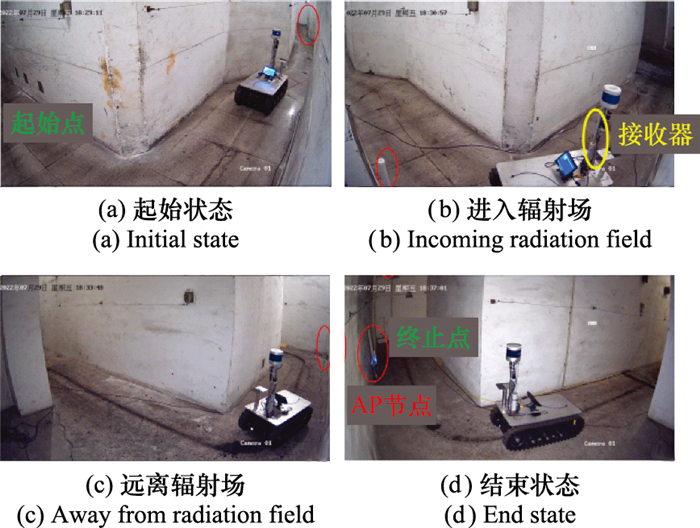
Table 4
Communication delay of ad-hoc network"
| 次数 | 时延/ms | 次数 | 时延/ms | 次数 | 时延/ms | 次数 | 时延/ms | |||
| 1 | 7.38 | 9 | 9.57 | 17 | 4.77 | 25 | 7.65 | |||
| 2 | 1.94 | 10 | 1.82 | 18 | 1.75 | 26 | 1.42 | |||
| 3 | 2.29 | 11 | 1.80 | 19 | 3.64 | 27 | 6.35 | |||
| 4 | 1.75 | 12 | 1.94 | 20 | 8.65 | 28 | 13.88 | |||
| 5 | 3.57 | 13 | 1.86 | 21 | 10.44 | 29 | 5.78 | |||
| 6 | 10.9 | 14 | 1.84 | 22 | 7.65 | 30 | 4.21 | |||
| 7 | 6.20 | 15 | 4.50 | 23 | 4.69 | 31 | 2.97 | |||
| 8 | 3.46 | 16 | 4.70 | 24 | 6.99 | 32 | 2.94 |

Fig.16
Video image feedback in experiment"

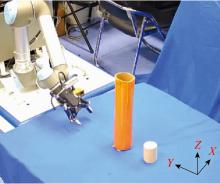
Fig.17
Layout of obstacle-avoidance grasping experiment"
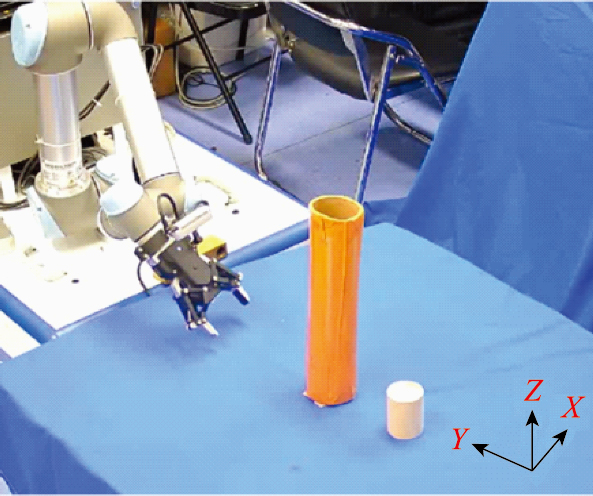
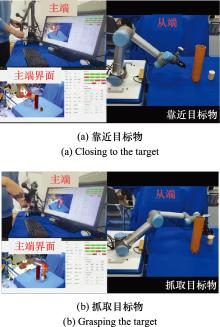
Fig.18
Obstacle-avoidance grasping process"
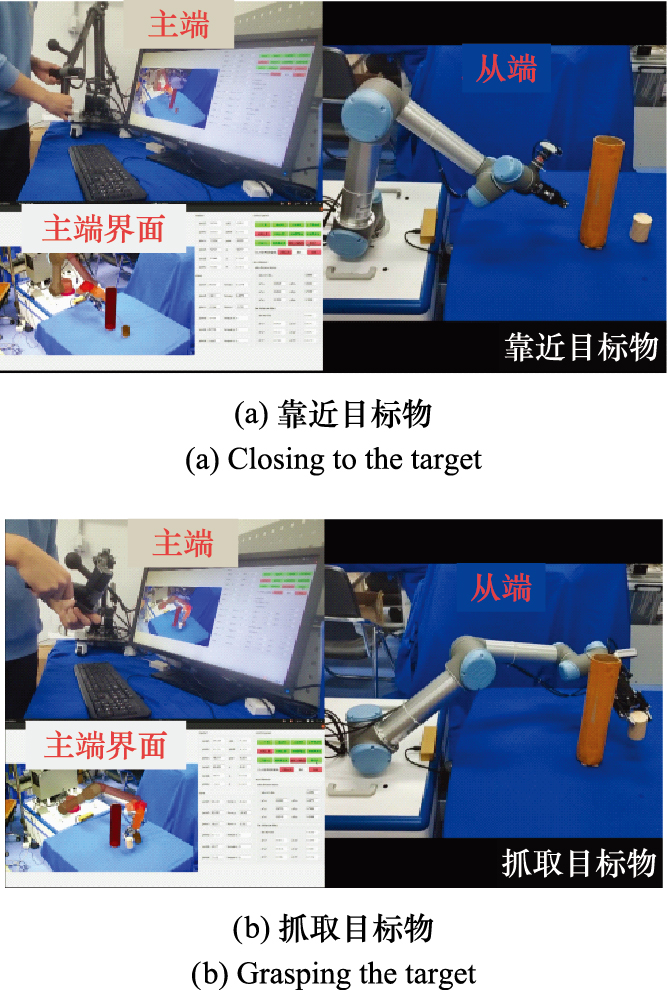
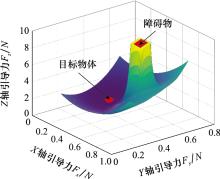
Fig.19
Schematic diagram of guiding force at different positions on the horizontal plane of the object"
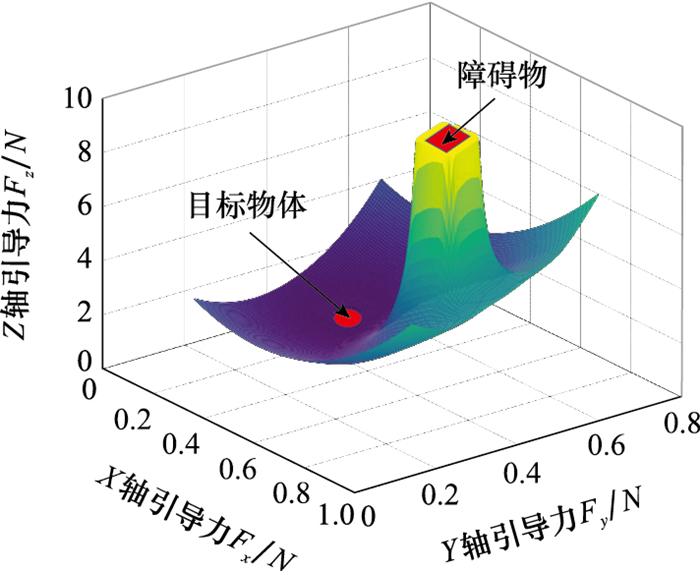

Fig.20
Top view of end trajectory during grasping process"
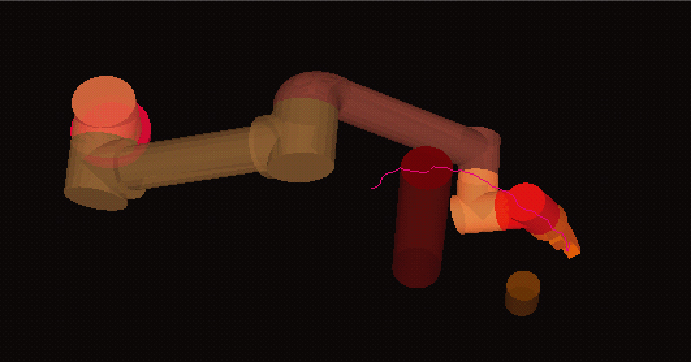
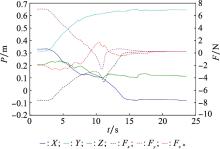
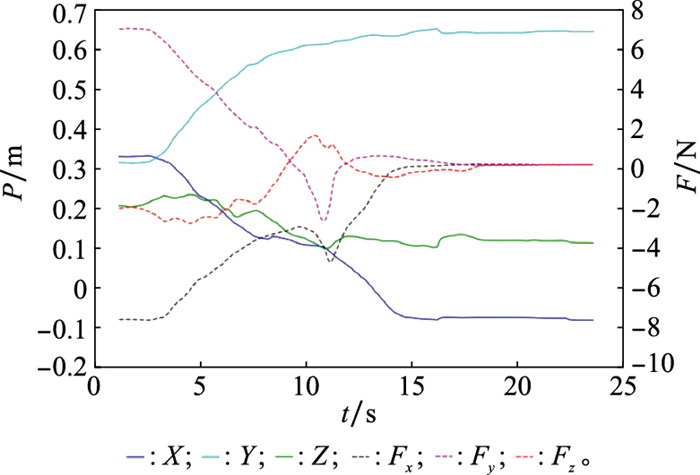
Fig.21
Schematic diagram of end position and guiding force"
| 1 | CUI J, TOSUNOGLU S, ROBERTS R, et al. A review of teleoperation system control[C]//Proc. of the Florida Conference Recent Advances in Robotics, 2003. |
| 2 |
BOGUE R . Robots in the nuclear industry: a review of technologies and applications[J]. Industrial Robot, 2011, 38 (2): 113- 118.
doi: 10.1108/01439911111106327 |
| 3 | 陈涛. 遥操作排爆机器人研制及其运动控制研究[D]. 济南: 山东大学, 2019. |
| CHEN T. Development and motion control research of teleoperation explosive ordnance disposal robot[D]. Jinan: Shandong University, 2019. | |
| 4 |
AKAHANE K , YONAI S , FUKUDA S , et al. The Fukushima nuclear power plant accident and exposures in the environment[J]. Environmentalist, 2012, 32 (2): 136- 143.
doi: 10.1007/s10669-011-9381-2 |
| 5 | GEORTZ R C , THOMPSON W M . Electronically controlled manipulator[J]. Nucleonics Ceased Publication, 1954, 12 (11): 46- 47. |
| 6 | TOKYO ELECTRIC POWER COMPANY. Decommissioning plan of Fukushima Daiichi nuclear power[EB/OL]. [2022-11-10]. http://www.tepco.co.jp/en/decommision/index-e.html, 2017. |
| 7 |
SHANG L , WANG H B , SI H Q , et al. Investigating the obstacle climbing ability of a coal mine search-and-rescue robot with a hydraulic mechanism[J]. Applied Sciences, 2022, 12 (20): 10485- 10489.
doi: 10.3390/app122010485 |
| 8 |
NAGATANI K , KIRIBAYASHI S , OKADA Y , et al. Emergency response to the nuclear accident at the Fukushima Daiichi nuclear power plants using mobile rescue robots[J]. Journal of Field Robotics, 2013, 30 (1): 44- 63.
doi: 10.1002/rob.21439 |
| 9 |
MAGNUSON S . Search-and-rescue robots needed, but market has yet to develop[J]. National Defense, 2011, 96 (10): 24- 26.
doi: 10.3969/j.issn.1002-4484.2011.10.011 |
| 10 | WU J W , ZHENG X M , CHEN J S , et al. Distributions and impacts of plutonium in the environment originating from the Fukushima Daiichi nuclear power plant accident: an overview of a decade of studies[J]. Journal of Environmental Radioactivity, 2022, 12 (6): 248- 253. |
| 11 |
KAWATSUMA S , MIMURA R , ASAMA H . Unitization for portability of emergency response surveillance robot system: experiences and lessons learned from the deployment of the JAEA-3 emergency response robot at the Fukushima Daiichi nuclear power plants[J]. Robomech Journal, 2017, 4, 6.
doi: 10.1186/s40648-017-0073-7 |
| 12 | DINH Q T , BUI N M T , NGUYEN T T , et al. Force reflecting joystick control for applications to bilateral teleoperation in construction machinery[J]. International Journal of Precision Engineering, 2017, 18 (3): 301- 315. |
| 13 |
SOYGUDER S , ABUT T . Haptic industrial robot control with variable time delayed bilateral teleoperation[J]. Industrial Robot, 2016, 43 (4): 390- 402.
doi: 10.1108/IR-12-2015-0213 |
| 14 |
TUGAL H , CARRASCO J . Teleoperation with nonlinear environments: multiplier approach[J]. IFAC-PapersOnLine, 2016, 49 (30): 308- 313.
doi: 10.1016/j.ifacol.2016.11.153 |
| 15 |
MATHESON A , DONMEZ B , REHMATULLAH F , et al. The effects of predictive displays on performance in driving tasks with multi-second latency aiding tele operation of lunar rovers[J]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 2013, 57 (1): 21- 25.
doi: 10.1177/1541931213571007 |
| 16 | YASUYOSHI Y . The use of robots to respond to nuclear accidents: applying the lessons of the past to the Fukushima Daiichi nuclear power station[J]. Annual Review of Control, Robotics, & Autonomous Systems, 2021, 33 (4): 681- 710. |
| 17 | SATO N. Evaluation exercise in the seminar for standard test method of ground robot at fukushima robot test field[C]//Proc. of the IEEE International Conference on Intelligence and Safety for Robotics, 2021. |
| 18 | 刘青松, 张一心, 向文元, 等. 核电站机器人技术应用现状及发展趋势[J]. 机器人技术与应用, 2011, (3): 12- 16. |
| LIU Q S , ZHANG Y X , XIANG W Y , et al. Application status and development trend of robot technology in nuclear power plant[J]. Robot Technique and Application, 2011, (3): 12- 16. | |
| 19 | 杨汝清, 宋克威. "勇士号"遥控移动式作业机器人[J]. 高技术通讯, 1997, 7 (2): 4- 8. |
| YANG R Q , SONG K W . A "Warrior" teleoperation mobile robot[J]. High Technology Communications, 1997, 7 (2): 4- 8. | |
| 20 |
宋爱国. 力觉临场感遥操作机器人(1): 技术发展与现状[J]. 南京信息工程大学学报, 2013, 5 (1): 1- 19.
doi: 10.3969/j.issn.1674-7070.2013.01.001 |
|
SONG A G . Force teleoperation telerobot (1): review of the history and development[J]. Journal of Nanjing University of Information Science and Technology, 2013, 5 (1): 1- 19.
doi: 10.3969/j.issn.1674-7070.2013.01.001 |
|
| 21 | XIA Y, WAN Y, CHEN T. Investigation on bifurcation and chaos control for a spur pair gear system with and without nonlinear suspension[C]//Proc. of the 37th Chinese Control Conference, 2018. |
| 22 | 崔建伟. 东南大学研制成功小型核化探测与应急处理遥操作机器人[J]. 机器人技术与应用, 2012, (1): 2- 6. |
| CUI J W . Southeast university developed a small nuclear detection and emergency handling teleoperated Robot[J]. Robot Technology and Application, 2012, (1): 2- 6. | |
| 23 | SHEN S B , SONG A G , LI T . Bilateral motion prediction and control for teleoperation under long time-varying delays[J]. ISA Transactions, 2021, 23 (115): 61- 70. |
| 24 | 张小俊, 李满宏, 张明路, 等. 核电站多功能水下机器人结构设计与分析[J]. 机械设计, 2016, 33 (6): 7- 16. |
| ZHANG X J , LI M H , ZHANG M L , et al. Structure design and analysis of multi-function underwater vehicle in nuclear power plant[J]. Journal of Machine Design, 2016, 33 (6): 7- 16. | |
| 25 | WANG Y H, GUAN C, LIU G Y, et al. Haptic-based isomorphic teleoperation system for nuclear spent fuel post-process[C]//Proc. of the World Conference on Intelligent and 3-D Technologies, 2022: 591-609. |
| 26 | KIM J H, LEE J C, CHOI Y R. Development of an underwater robot for nuclear reactor vessel[C]//Proc. of the IEEE International Conference on Robotics and Biomimetics, 2013: 1699-1703. |
| 27 | SATOSHI O , KATSHIKO H , RYOSUKE K , et al. Development and application of robotics for decommissioning of Fukushima Daiichi nuclear power plant[J]. Journal of the Robotics Society of Japan, 2022, 4 (8): 89- 94. |
| 28 | ZHAO F, MA Y G, SUN Y S. Application and standardization trend of maintenance and inspection robot(MIR) in nuclear power station[C]//Proc. of the 3rd International Symposium on Mechatronics and Industrial Informatics, 2017. |
| 29 | HUANG P F , DAI P , LU Z Y , et al. Asymmetric wave variable compensation method in dual-master-dual-slave multilateral teleoperation system[J]. Mechatronics, 2018, 49, 1- 10. |
| 30 | 沈华亚, 朱万宁, 董强敏, 等. 耐强辐射遥控探测机器人研制[J]. 核电子学与探测技术, 2015, 35 (1): 5- 11. |
| SHEN H Y , ZHU W N , DONG Q M , et al. Development of radiation-resistant remote sensing robot[J]. Nuclear Electronics and Detection Technology, 2015, 35 (1): 5- 11. |
| [1] | Youbin FU, Qiaoyan KANG, Jianfeng WANG, Haiyan HU, Shuo ZHAO. Intelligent deployment method of software-defined flying ad-hoc network controller based on label segmentation [J]. Systems Engineering and Electronics, 2022, 44(10): 3249-3257. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||