Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (4): 1364-1371.doi: 10.12305/j.issn.1001-506X.2024.04.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Improved bi-directional rapidly-exploring random tree path planning for USV
Guixiang ZHAO1, Jian ZHOU2, Yunmiao LI1, Chenxu WANG1,*
- 1. School of Marine Science and Technology, Tianjin University, Tianjin 300110, China
2. Jiangsu Autonation Research Institute, Beijing 100036, China
-
Received:2023-03-13Online:2024-03-25Published:2024-03-25 -
Contact:Chenxu WANG
CLC Number:
Cite this article
Guixiang ZHAO, Jian ZHOU, Yunmiao LI, Chenxu WANG. Improved bi-directional rapidly-exploring random tree path planning for USV[J]. Systems Engineering and Electronics, 2024, 46(4): 1364-1371.
share this article
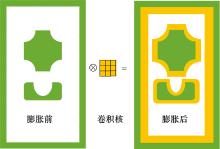
Fig.1
Schematic diagram of obstacle expansion"
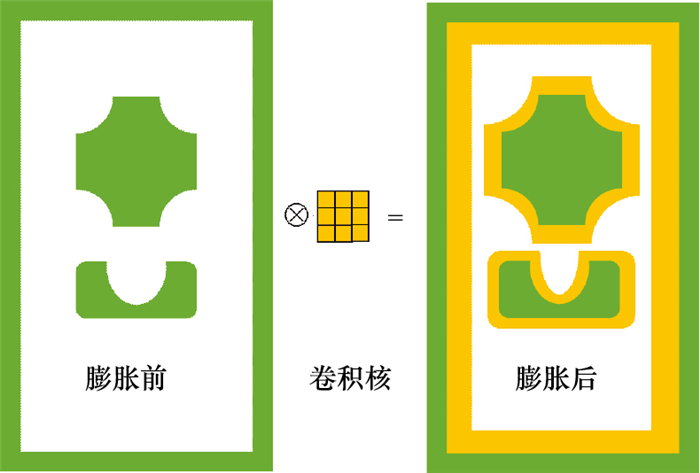

Fig.2
Schematic diagram of the BI-RRT"
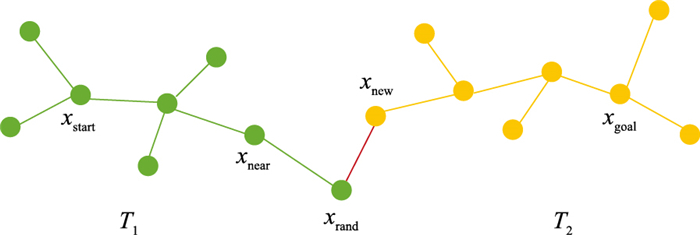

Fig.3
Random point distribution with different covariance matrixes"
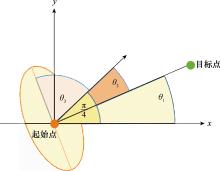
Fig.4
Schematic diagram of coordinate system conversion"
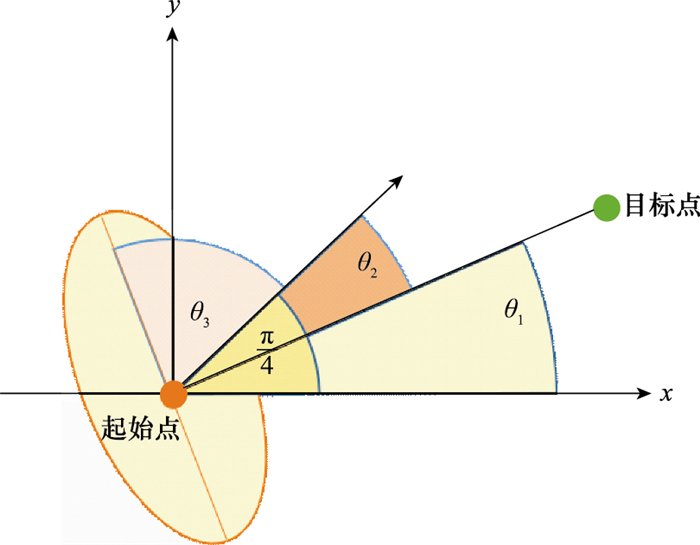
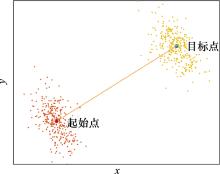
Fig.5
Distribution schematic diagram of Gaussian random points"
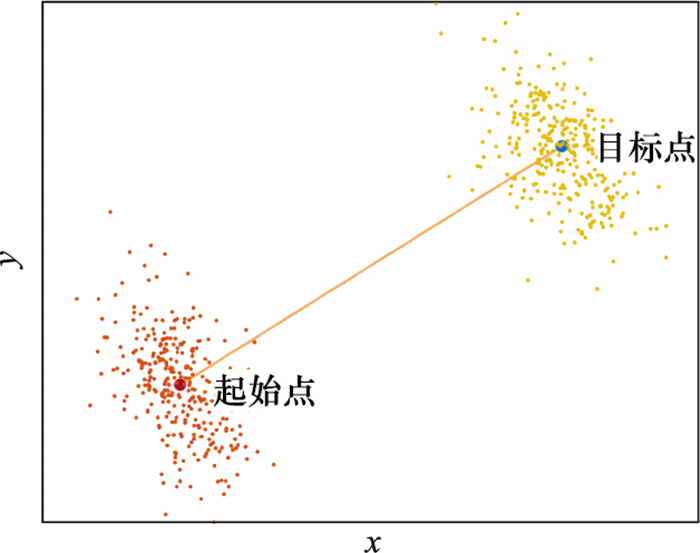

Fig.6
Schematic diagram of smooth connection of search tree"
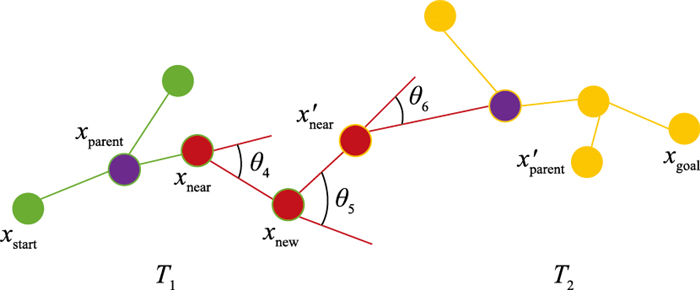
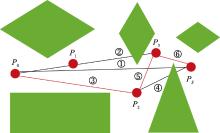
Fig.7
Schematic diagram of path cuttings"
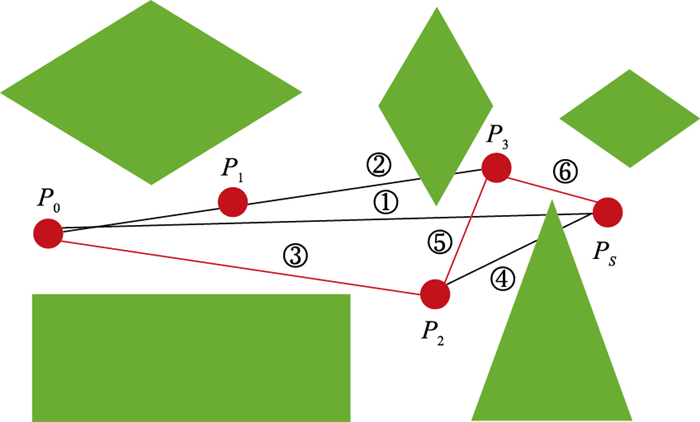
Fig.8
Schematic diagram of path cuttings"

Fig.9
Comparative experiments in narrow-passage waters"

Table 1
Comparison of simulation data in narrow-passage waters"
| 参数 | BI-RRT | BI-RRTstar | IB-RRTstar | 改进BI-RRT |
| 平均时间/s | 0.44 | 2.17 | 1.72 | 0.28 |
| 平均采样点数/个 | 83 | 1 500 | 1 500 | 38 |
| 平均拐点数/个 | 30 | 18 | 6 | 0 |
| 平均路径长度/m | 898.60 | 642.54 | 637.70 | 640.45 |

Fig.10
Comparative experiments in complex waters"

Table 2
Comparison of simulation data in complex waters"
| 参数 | BI-RRT | BI-RRTstar | IB-RRTstar | 改进BI-RRT |
| 平均时间/s | 0.43 | 0.72 | 0.97 | 0.24 |
| 平均采样点数/个 | 370 | 1 500 | 1 500 | 88 |
| 平均拐点数/个 | 55 | 19 | 13 | 0 |
| 平均路径长度/m | 1 054.50 | 860.90 | 847.41 | 850.21 |
| 1 |
YIN L L , ZHANG R B , GU H W , et al. Research on cooperative perception of MUSVs in complex ocean conditions[J]. Sensors, 2021, 21 (5): 1657.
doi: 10.3390/s21051657 |
| 2 |
HAN S , WANG L , WANG Y T , et al. An efficient motion planning based on grid map: predicted trajectory approach with global path guiding[J]. Ocean Engineering, 2021, 238, 109696.
doi: 10.1016/j.oceaneng.2021.109696 |
| 3 |
WANG J , WANG R T , LU D H , et al. USV dynamic accurate obstacle avoidance based on improved velocity obstacle method[J]. Electronics, 2022, 11 (17): 2720.
doi: 10.3390/electronics11172720 |
| 4 |
WU M Y , ZHANG A M , GAO M , et al. Ship motion planning for MASS based on a multi-objective optimization HA * algorithm in complex navigation conditions[J]. Journal of Marine Science and Engineering, 2021, 9 (10): 1126.
doi: 10.3390/jmse9101126 |
| 5 |
PARK J A , KIM S A , NOH G A , et al. Mission planning and performance verification of an unmanned surface vehicle using a genetic algorithm[J]. International Journal of Naval Architecture and Ocean Engineering, 2021, 13, 575- 584.
doi: 10.1016/j.ijnaoe.2021.07.002 |
| 6 | GUO X H , JI M J , ZHAO Z W , et al. Global path planning and multi-objective path control for unmanned surface vehicle based on modified particle swarm optimization (PSO) algorithm[J]. Ocean Engineering, 2020, 216 (1): 107693. |
| 7 |
程谦, 高嵩, 曹凯, 等. 基于PRM优化算法的移动机器人路径规划[J]. 计算机应用与软件, 2020, 37 (12): 254-259, 296.
doi: 10.3969/j.issn.1000-386x.2020.12.040 |
|
CHENG Q , GAO S , CAO K , et al. Path planning of mobile robot based on PRM optimization algotithm[J]. Computer Applications and Software, 2020, 37 (12): 254-259, 296.
doi: 10.3969/j.issn.1000-386x.2020.12.040 |
|
| 8 | WANG W , ZUO L , XU X . A learning-based multi-RRT approach for robot path planning in narrow passages[J]. Journal of Intelligent & Robotic Systems, 2018, 90 (1): 81- 100. |
| 9 |
JEOONG I B , LEE S J , KIM J H . Quick-RRTA * : triangular inequality-based implementation of RRT * with improved initial solution and convergence rate[J]. Expert Systems with Applications, 2019, 123, 82- 90.
doi: 10.1016/j.eswa.2019.01.032 |
| 10 | 高升, 艾剑良, 王之豪. 混合种群RRT无人机航迹规划方法[J]. 系统工程与电子技术, 2020, 42 (1): 101- 107. |
| GAO S , AI J L , WANG Z H . Mixed population RRT algorithm for UAV path pianning[J]. Systems Engineering and Electronics, 2020, 42 (1): 101- 107. | |
| 11 | LAVALLE S M , KUFFNER J J . Rapidly-exploring random trees: progress and prospects[J]. Algorithmic & Computational Robotics New Directions, 2001, 5, 303- 307. |
| 12 |
XIN P , WANG X M , LIU X L , et al. Improved bidirectional RRT * algorithm for robot path planning[J]. Sensors, 2023, 23 (2): 1041.
doi: 10.3390/s23021041 |
| 13 |
文龙贻彬, 刘友, 穆京京, 等. 无人艇航行规则及运动学约束下的改进RRT轨迹规划方法[J]. 导航与控制, 2020, 19 (1): 105-115, 124.
doi: 10.3969/j.issn.1674-5558.2020.01.012 |
|
WENGLONG Y B , LIU Y , MU J J , et al. Improved RRT trajectory planning methed under unmanned surface vehicle rules and kinematic constraints[J]. Navigation and Control, 2020, 19 (1): 105-115, 124.
doi: 10.3969/j.issn.1674-5558.2020.01.012 |
|
| 14 |
向金林, 王鸿东, 欧阳子路, 等. 基于改进双向RRT的无人艇局部路径规划算法研究[J]. 中国造船, 2020, 61 (1): 157- 166.
doi: 10.3969/j.issn.1000-4882.2020.01.016 |
|
XIANG J L , WANG H D , OUYANG Z L , et al. Algorithm of local path planning for unmanned surface vehicles based on improved Bi-RRT[J]. Shipbuilding of China, 2020, 61 (1): 157- 166.
doi: 10.3969/j.issn.1000-4882.2020.01.016 |
|
| 15 | 徐秉超, 严华. 一种改进的双向快速搜索随机树算法[J]. 科学技术与工程, 2020, 20 (19): 7765- 7771. |
| XU B C , YAN H . An improved bidirectional rapid-exploring random tree algorithm[J]. Science Technology and Engineering, 2020, 20 (19): 7765- 7771. | |
| 16 |
MA G J , DUAN Y L , LI M E , et al. A probability smoothing Bi-RRT path planning algorithm for indoor robot[J]. Future Generation Computer Systems, 2023, 143, 349- 360.
doi: 10.1016/j.future.2023.02.004 |
| 17 |
MASEKO B B , VAN DAALEN C E , TREURNICHT J . Optimised informed RRTs for mobile robot path planning[J]. IFAC-PapersOnLine, 2021, 54 (21): 157- 162.
doi: 10.1016/j.ifacol.2021.12.027 |
| 18 |
KARAMAN S , FRAZZOLI E . Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30 (7): 846- 894.
doi: 10.1177/0278364911406761 |
| 19 |
QURESHI A H , AYAZ Y . Potential functions based sampling heuristic for optimal path planning[J]. Autonomous Robots, 2016, 40 (6): 1079- 1093.
doi: 10.1007/s10514-015-9518-0 |
| 20 | AKGUN B, STILMAN M. Sampling heuristics for optimal motion planning in high dimensions[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2011: 2640-2645. |
| 21 |
QURESHI A H , AYAZ Y . Intelligent bidirectional rapidly-exploring random trees for optimal motion planning in complex cluttered environments[J]. Robotics and Autonomous Systems, 2015, 68, 1- 11.
doi: 10.1016/j.robot.2015.02.007 |
| 22 |
LIU H Y , ZHANG X B , WEN J , et al. Goal-biased bidirectional RRT based on curve-smoothing[J]. IFAC-PapersOnLine, 2019, 52 (24): 255- 260.
doi: 10.1016/j.ifacol.2019.12.417 |
| [1] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [2] | Zihao CHEN, Juan LI, Chang LIU, Jie LI, Xiaoyu LIU. Task planning method for coordinated attacks on ground targets under time constraints [J]. Systems Engineering and Electronics, 2023, 45(8): 2353-2360. |
| [3] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| [4] | Liyao WU, Xichao SU, Lei WANG, Zishuang PAN. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. |
| [5] | Yao LIU, Yangsheng XIA, Jianmai SHI, Chao CHEN, Jincai HUANG. Path planning method for multi-area coverage by cooperated ground vehicle multi-drone [J]. Systems Engineering and Electronics, 2023, 45(5): 1380-1390. |
| [6] | Qinglu WANG, Fengguo WU, Chengchen ZHENG, Hui LI. UAV path planning based on optimized artificial potential field method [J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468. |
| [7] | Wei HAN, Zixuan LIU, Xichao SU, Kaikai CUI, Jie LIU. Deck path planning algorithm of carrier-based aircraft based on heuristic and optimal control [J]. Systems Engineering and Electronics, 2023, 45(4): 1098-1110. |
| [8] | Haojie ZHANG, Yudong ZHANG, Rongmin LIANG, Tiantian YANG. Energy-efficient path planning method for robots based on improved A* algorithm [J]. Systems Engineering and Electronics, 2023, 45(2): 513-520. |
| [9] | Jingyu WU, Shiqiang ZHU, Wei SONG, Haolei SHI, Zenan WU. Coverage path planning based on improved cellular decomposition [J]. Systems Engineering and Electronics, 2023, 45(12): 3949-3957. |
| [10] | Guixiang ZHAO, Chenxu WANG, Heping WANG, Yunmiao LI. Local path planning for unmanned surface vehicle using improved velocity obstacle method [J]. Systems Engineering and Electronics, 2023, 45(12): 3975-3983. |
| [11] | Zhi REN, Dong ZHANG, Shuo TANG. Improved three-dimensional A* algorithm of real-time path planning based on reinforcement learning [J]. Systems Engineering and Electronics, 2023, 45(1): 193-201. |
| [12] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [13] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [14] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| [15] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||