Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (10): 3265-3273.doi: 10.12305/j.issn.1001-506X.2023.10.31
• Guidance, Navigation and Control • Previous Articles
Analysis and comparison of Euler angles based-error model based on Lie groups of the strapdown inertial navigation system
Tiangao ZHU1, Yong LIU2, Kailong LI1,*, Renjie ZHAO3
- 1. College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China
2. College of Ship and Ocean, Naval University of Engineering, Wuhan 430033, China
3. Representative Bureau of Naval Armament Department in Beijing, Beijing 100071, China
-
Received:2022-01-14Online:2023-09-25Published:2023-10-11 -
Contact:Kailong LI
CLC Number:
Cite this article
Tiangao ZHU, Yong LIU, Kailong LI, Renjie ZHAO. Analysis and comparison of Euler angles based-error model based on Lie groups of the strapdown inertial navigation system[J]. Systems Engineering and Electronics, 2023, 45(10): 3265-3273.
share this article
Table 1
Specifications of MEMS"
| 参数 | 陀螺仪 | 加速度计 |
| 测量范围 | ±400°/s | ±10g |
| 更新频率 | 125 Hz | 125 Hz |
| 精度等级 | ≤0.5°/h | ≤0.05 mg |

Fig.1
Estimation error of attitude on [1° 1° 3°]"
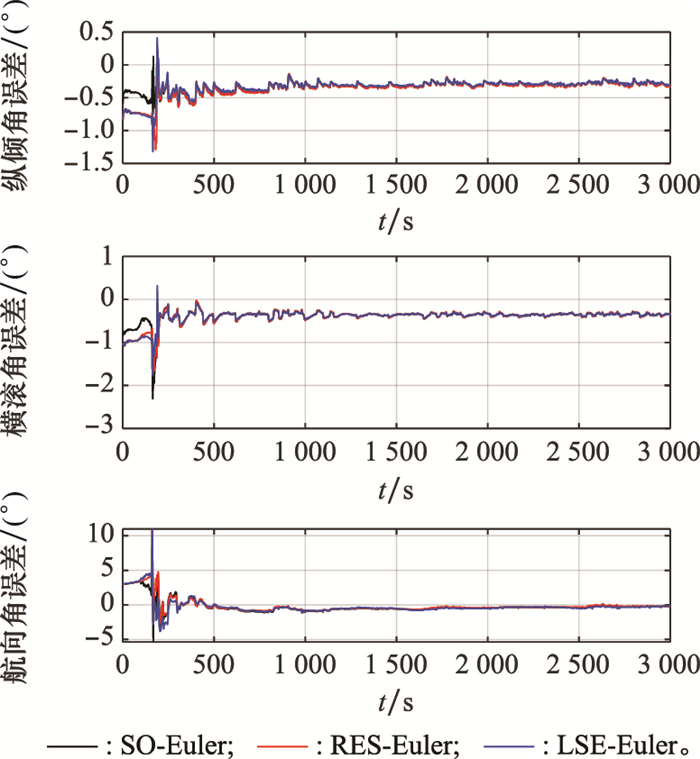
Fig.2
Estimation error of attitude on [3° 3° 9°]"
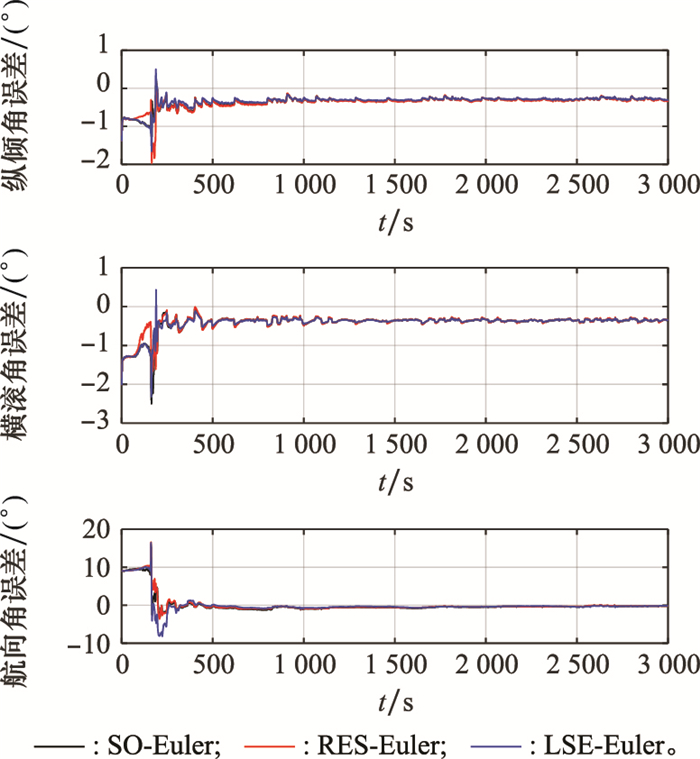
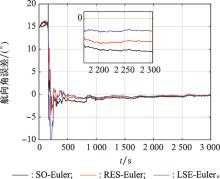
Fig.3
Estimation error of yaw on [5° 5° 15°]"
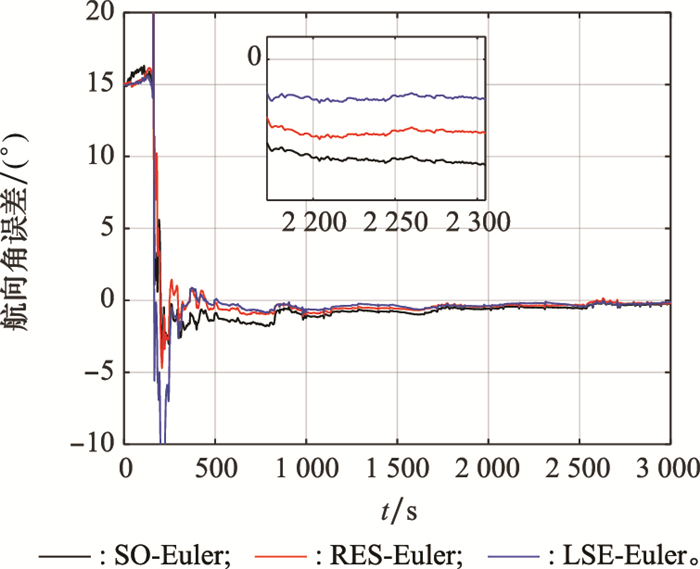
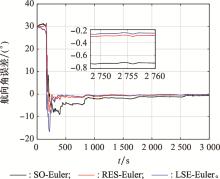
Fig.4
Estimation error of yaw on [10° 10° 30°]"
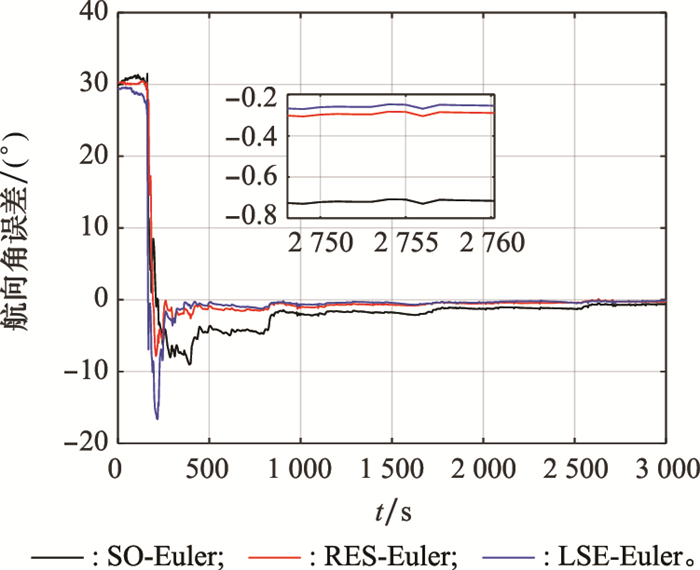
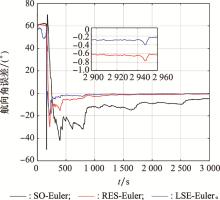
Fig.5
Estimation error of yaw on [20° 20° 60°]"
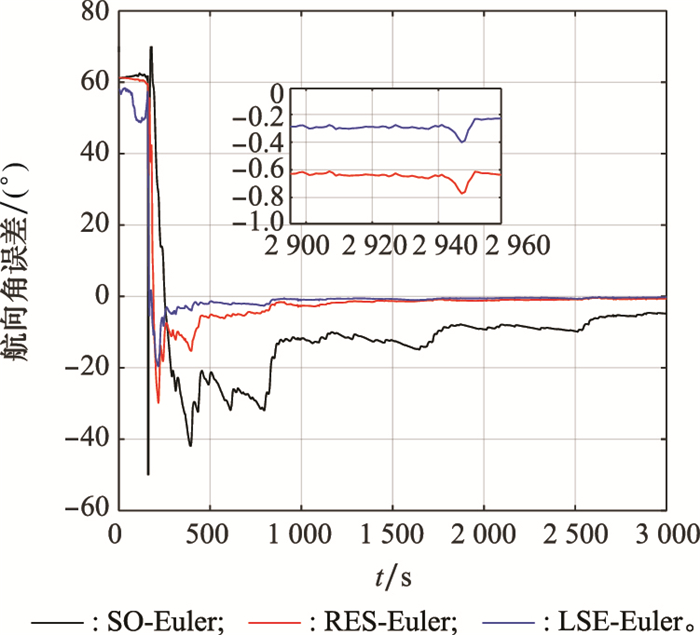
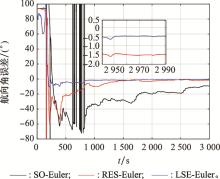
Fig.6
Estimation error of yaw on [30° 30° 90°]"
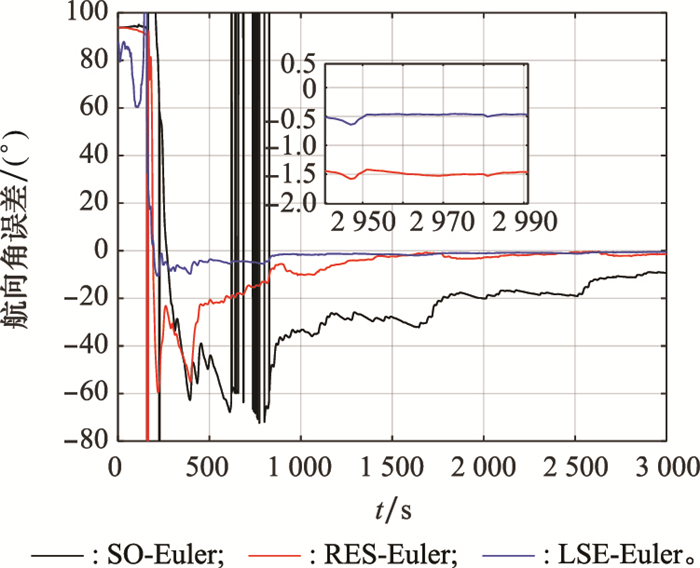
Table 2
Specifications of IMU"
| 参数 | 陀螺仪 | 加速度计 |
| 测量范围 | ±200°/s | ±15g |
| 更新频率/Hz | 200 | 200 |
| 精度等级 | ≤0.02°/h | ≤50 μg |
| 标度因数重复性 | ≤30×10-6 | ≤50×10-6 |
Table 3
Specifications of DVL"
| 参数 | DVL |
| 测速精度/(cm/s) | 0.05%V±0.5 |
| 测速范围/(m/s) | -5.144~10.288 |
| 更新频率/Hz | 1 |
| 底跟踪深度/m | 300 |
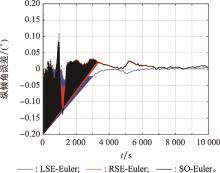
Fig.7
Estimation error of pitch angle"

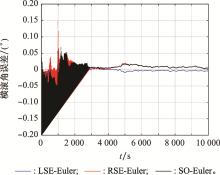
Fig.8
Estimation error of roll angle"
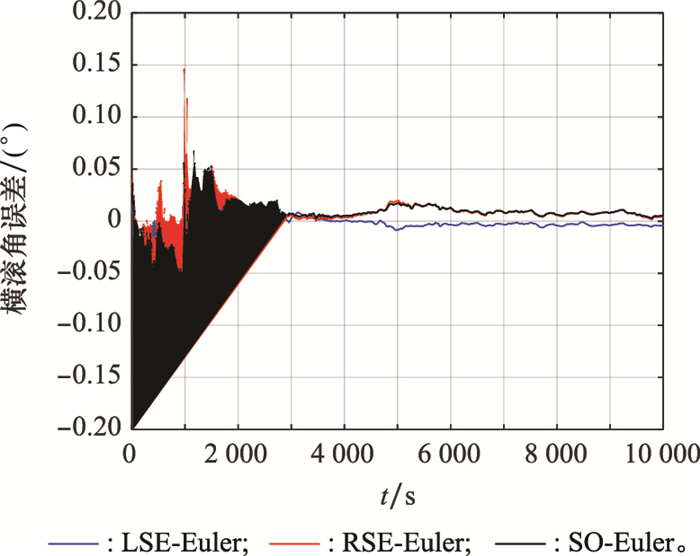
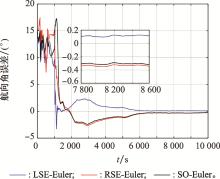
Fig.9
Estimation error of yaw angle"
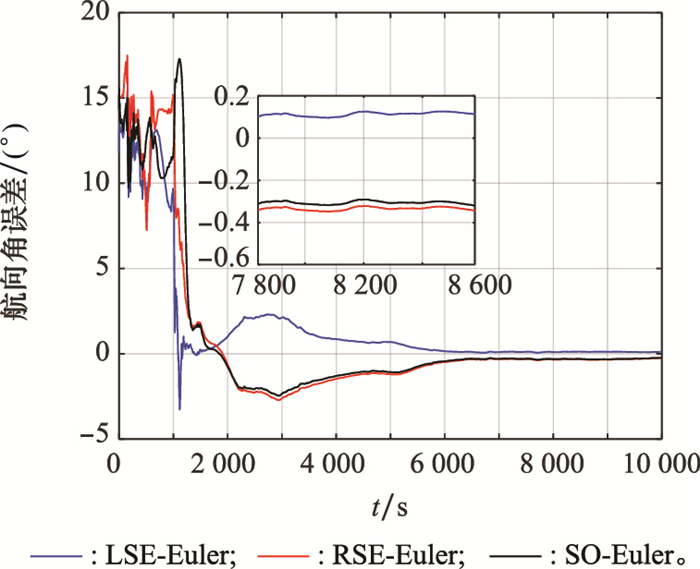
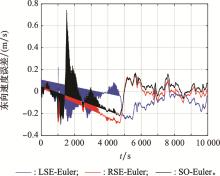
Fig.10
Estimation error of east velocity"
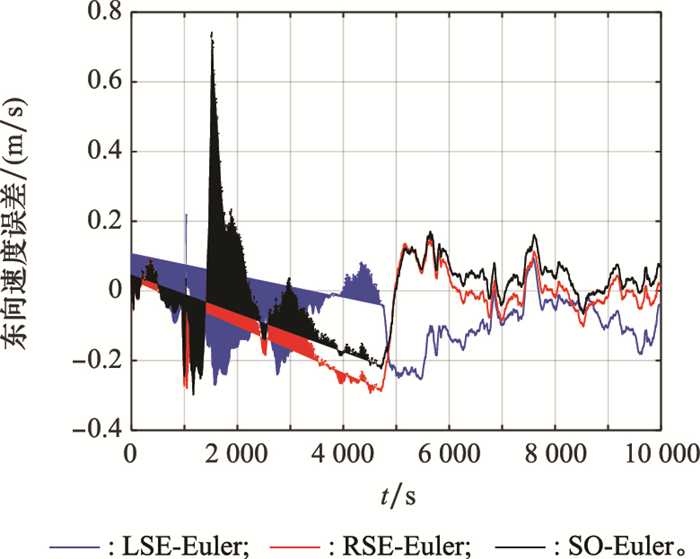
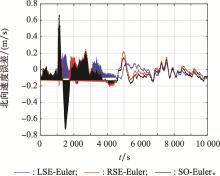
Fig.11
Estimation error of north velocity"

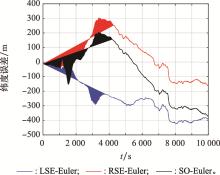
Fig.12
Estimation error of latitude"
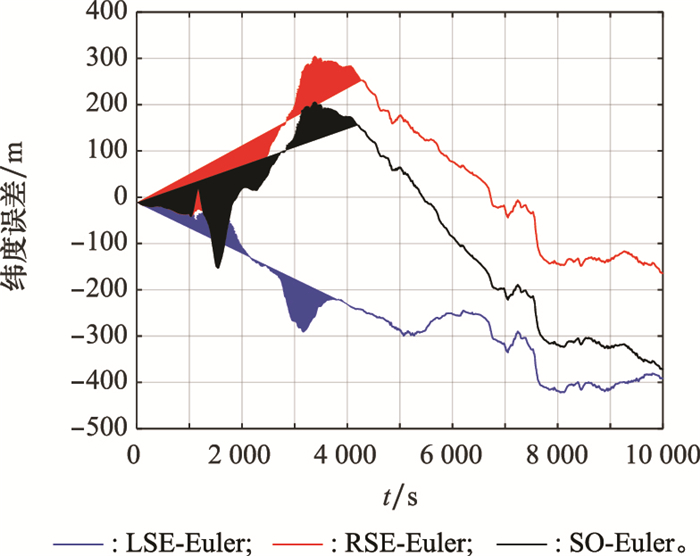
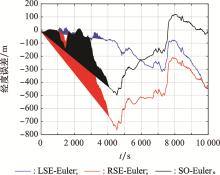
Fig.13
Estimation error of longitude"
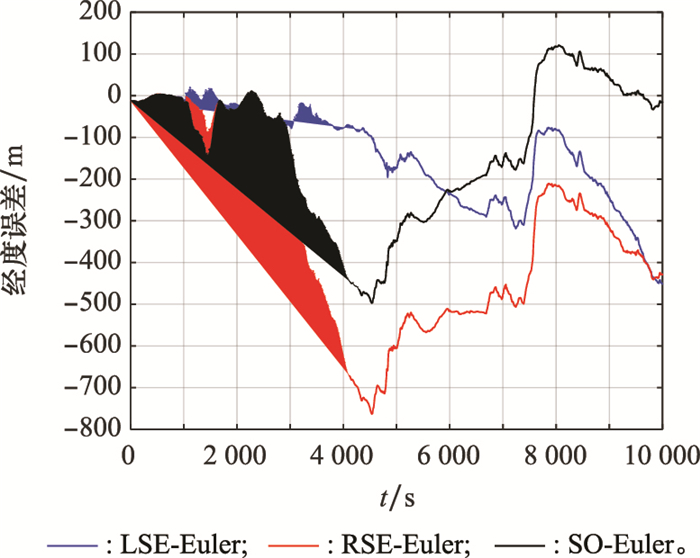
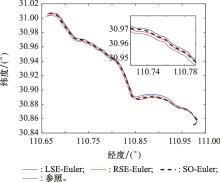
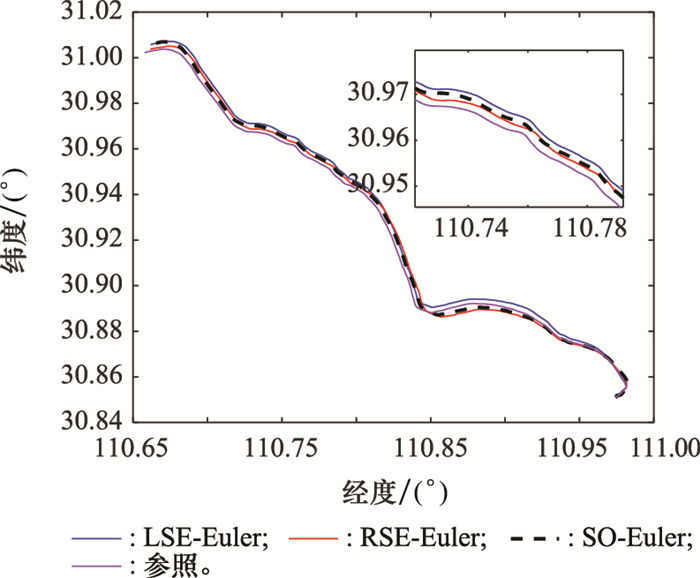
Fig.14
Comparison of motion trajectory"
| 1 | 赵仁杰, 李开龙, 胡柏青, 等. 基于改进四元数阻尼误差模型的SINS初始对准算法[J]. 系统工程与电子技术, 2021, 43 (11): 3330- 3337. |
| ZHAO R J , LI K L , HU B Q , et al. SINS initial alignment algorithm based on inproved quaternion damping error model[J]. Systems Engineering and Electronics, 2021, 43 (11): 3330- 3337. | |
| 2 | 严恭敏. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019. |
| YAN G M . Strapdown inertial navigation system algorithm and integrated navigation principle[M]. Xi'an: Northwestern Polytechnology University Press, 2019. | |
| 3 | CHANG L B , QIN F J , LI A . A novel backtracking scheme for attitude determination-based initial alignment[J]. IEEE Trans. on Automation Science and Engineering, 2014, 12 (1): 384- 390. |
| 4 | ZHANG X Y , NING K W . A preferable airborne integrated navigation method based on INS and GPS[J]. Journal of Sensors, 2018, 2018, 7342896. |
| 5 |
MASARU N , YUSUKE G , HENRI W , et al. Application of inertial and GNSS integrated navigation to seabird biologging[J]. Journal of Robotics and Mechatronics, 2021, 33 (3): 526- 536.
doi: 10.20965/jrm.2021.p0526 |
| 6 |
SUN J , WANG F . An effective LS-SVM/AKF aided SINS/DVL integrated navigation system for underwater vehicles[J]. Peer-to-Peer Networking and Applications, 2022, 15 (3): 1437- 1451.
doi: 10.1007/s12083-022-01310-x |
| 7 |
ZHANG G , HSU L T . Intelligent GNSS/INS integrated navigation system for a commercial UAV flight control system[J]. Aerospace Science and Technology, 2018, 80, 368- 380.
doi: 10.1016/j.ast.2018.07.026 |
| 8 |
EL-SHEIMY N , YOUSSEF A . Inertial sensors technologies for navigation applications: state of the art and future trends[J]. Satellite Navigation, 2020, 1, 2.
doi: 10.1186/s43020-019-0001-5 |
| 9 | HU G G , NI L Q , GAO B B , et al. Model predictive based unscented Kalman filter for hypersonic vehicle navigation with INS/GNSS integration[J]. IEEE Access, 2019, 8, 4814- 4823. |
| 10 |
RAFATNIA S , NOURMOHAMMADI H , KEIGHOBADI J . Fuzzy-adaptive constrained data fusion algorithm for indirect centralized integrated SINS/GNSS navigation system[J]. GPS Solutions, 2019, 23 (3): 62.
doi: 10.1007/s10291-019-0845-z |
| 11 |
LIU Y H , FAN X Q , LYU C , et al. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles[J]. Mechanical Systems and Signal Processing, 2018, 100, 605- 616.
doi: 10.1016/j.ymssp.2017.07.051 |
| 12 |
OUYANG W , WU Y X . A trident quaternion framework for inertial-based navigation Part Ⅱ: error models and application to initial alignment[J]. IEEE Trans.on Aerospace and Electronic Systems, 2022, 58 (3): 2421- 2437.
doi: 10.1109/TAES.2021.3133219 |
| 13 |
XIONG H L , BIAN R C , LI Y J , et al. Fault-tolerant GNSS/SINS/DVL/CNS integrated navigation and positioning mechanism based on adaptive information sharing factors[J]. IEEE Systems Journal, 2020, 14 (3): 3744- 3754.
doi: 10.1109/JSYST.2020.2981366 |
| 14 | LI K L , HU B Q , GAO J D , et al. Directnavigation mode and indirect navigation mode for integrated SINS/GPS[J]. Applied Mechanics and Materials, 2014, 568 (2): 958- 963. |
| 15 |
LI K L , LU X , LI W K . Nonlinear error model based Quaternion for INS: analysis and compensation[J]. IEEE Trans.on Vehicular Technology, 2021, 70 (1): 263- 272.
doi: 10.1109/TVT.2020.3046680 |
| 16 |
毛玉良, 陈家斌, 宋春雷, 等. 捷联惯导姿态误差模型分析[J]. 中国惯性技术学报, 2013, 21 (2): 182- 185.
doi: 10.13695/j.cnki.12-1222/o3.2013.02.011 |
|
MAO Y L , CHEN J B , SONG C L , et al. Analysis of attitude error models of strapdown inertial navigation system[J]. Journal of Chinese Inertial Technology, 2013, 21 (2): 182- 185.
doi: 10.13695/j.cnki.12-1222/o3.2013.02.011 |
|
| 17 |
MAO J , LIAN J X , HU X P . Strapdown inertial navigation algorithms based on Lie group[J]. The Journal of Navigation, 2017, 70 (1): 165- 183.
doi: 10.1017/S037346331600045X |
| 18 | CHANG L B . SE(3) based extended Kalman filter for attitude estimation[J]. Journal of Chinese Inertial Technology, 2020, 28 (4): 499-504, 550. |
| 19 | 蒋宁. 基于李群描述的捷联惯性导航系统研究[D]. 北京: 北京工业大学, 2019. |
| JIANG N. An application algorithm for strapdown inertial navigation system using Lie group[D]. Beijing: Beijing University of Technology, 2019. | |
| 20 |
廖涛涛, 敬忠良, 李旻哲, 等. 基于李群的视觉/惯性自适应组合导航算法[J]. 信息与控制, 2020, 49 (5): 585-590, 597.
doi: 10.13976/j.cnki.xk.2020.9507 |
|
LIAO T T , JING Z L , LI W Z , et al. An adaptive visual/inertial integrated navigation algorithm based on Lie groups[J]. Information and Control, 2020, 49 (5): 585-590, 597.
doi: 10.13976/j.cnki.xk.2020.9507 |
|
| 21 |
CUI J R , WANG M S , WU Y Q , et al. Lie group based nonlinear state errors for MEMS-IMU/GNSS/magnetometer integrated navigation[J]. The Journal of Navigation, 2021, 74 (4): 887- 900.
doi: 10.1017/S037346332100014X |
| 22 |
WANG M S , WU W Q , ZHOU P Y , et al. State transformation extended Kalman filter GPS/SINS tightly coupled integration[J]. GPS Solutions, 2018, 22, 112.
doi: 10.1007/s10291-018-0773-3 |
| 23 |
BARRAU A , BONNABEL S . The inveriant extended Kalman filter as a stable observer[J]. IEEE Trans.on Automatic Control, 2017, 62 (4): 1797- 1812.
doi: 10.1109/TAC.2016.2594085 |
| 24 |
HARTLEY R , GHAFFARI M , EUSTICE R M , et al. Contact-aided invariant extended Kalman filtering for robot state estimation[J]. The Inertional Journal of Robotics Research, 2020, 39 (4): 402- 430.
doi: 10.1177/0278364919894385 |
| 25 |
ZHU T G , LIU Y , LI W K , et al. The quaternion-based attitude error for the nonlinear error model of the INS[J]. IEEE Sensors Journal, 2021, 21 (22): 25782- 25795.
doi: 10.1109/JSEN.2021.3118039 |
| 26 |
LUO Y R , GUO C , LIU J N . Equivariant filtering framework for inertial-integrated navigation[J]. Satellite Navigation, 2021, 2, 30.
doi: 10.1186/s43020-021-00061-z |
| 27 | LUO Y R, GUO C, YOU S Y, et al. SE3(2) based extended Kalman filtering and smoothing framework for inertial-integrated navigation[EB/OL]. [2022-01-10]. https://doi.org/10.48550/arXiv.2102.12897. |
| 28 | CHANG L B , DI J B , QIN F J , et al. Inertial based integration with transformed INS mechanization in earth frame[J]. IEEE/ASME Trans.on Mechatronics, 2021, 27 (3): 1738- 1749. |
| 29 |
FU J P , PEI F , XU H , et al. A novel in-motion alignment method for underwater SINS using a state-dependent Lie group filter[J]. Navigation, 2020, 67 (3): 451- 470.
doi: 10.1002/navi.387 |
| 30 | CHANG L , QIN F , XU J . Strapdown inertial navigation system initial alignment based on group of double direct spatial isometries[J]. IEEE Sensors Journal, 2021, 22 (1): 803- 818. |
| 31 | TORRISI V, NUCCI M C. Application of Lie group analysis to a mathematical model[C]//Proc. of the Geometrical Study of Differential Equations: NSF-CBMS Conference on the Geometrical Study of Differential Equations, 2001, 285: 11. |
| 32 | 一组STIM300-GNSS跑车数据[EB/OL]. [2021-12-20]. http://www.psins.org.cn/newsinfo/958984.html. |
| A set of STIM300-GNSS sports car data[EB/OL]. [2021-12-20]. http://www.psins.org.cn/newsinfo/958984.html. |
| [1] | Haijian XUE, Tao WANG, Xinghui CAI, Jintao WANG, Ying JIANG. In-motion alignment method for vehicle carried SINS aided by odometer [J]. Systems Engineering and Electronics, 2023, 45(6): 1805-1813. |
| [2] | Lichun GAO, Mingyang GAO, Xiaofang CHEN, Jianbing RAO, Zesong FEI, Shaojie NI. High precision approach-and-landing navigation technology based on SINS/GBAS integrated navigation [J]. Systems Engineering and Electronics, 2023, 45(1): 210-220. |
| [3] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [4] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [5] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [6] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [7] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [8] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [9] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| [10] | Zhihao XU, Zhaofa ZHOU, Zhenjun CHANG, Qi GUO. Initial alignment method based on information reuse and algorithm fusion [J]. Systems Engineering and Electronics, 2021, 43(5): 1310-1315. |
| [11] | Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting [J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353. |
| [12] | Jing SU, Huafeng HE, Yaomin HE, Yifan WANG, Xiaofei HAN. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics [J]. Systems Engineering and Electronics, 2021, 43(4): 1044-1049. |
| [13] | Renjie ZHAO, Kailong LI, Baiqing HU, Jiayu TIAN. SINS initial alignment algorithm based on improved quaternion damping error model [J]. Systems Engineering and Electronics, 2021, 43(11): 3330-3337. |
| [14] | Xu LYU, Baiqing HU, Yongbin DAI, Renjie ZHAO. Application of USQUE based on PSO in attitude estimation of integrated navigation [J]. Systems Engineering and Electronics, 2020, 42(6): 1366-1371. |
| [15] | Kaixin LUO, Meiping WU, Ying FAN. Robust adaptive filtering based on maximum entropy method and its application [J]. Systems Engineering and Electronics, 2020, 42(3): 667-673. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||