Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (5): 1310-1315.doi: 10.12305/j.issn.1001-506X.2021.05.19
• Guidance, Navigation and Control • Previous Articles Next Articles
Initial alignment method based on information reuse and algorithm fusion
Zhihao XU1( ), Zhaofa ZHOU1,*(), Zhenjun CHANG1(), Qi GUO2()
), Zhaofa ZHOU1,*(), Zhenjun CHANG1(), Qi GUO2()
- 1. Missile Engineering Institute, Rocket Force University of Engineering, Xi'an 710025, China
2. Unit 96902 of the PLA, Beijing 100015, China
-
Received:2020-07-01Online:2021-05-01Published:2021-04-27 -
Contact:Zhaofa ZHOU E-mail:1500105885@qq.com;zhaofa_zhou@163.com;changzj2105@163.com;Guoqi_academic@163.com
CLC Number:
Cite this article
Zhihao XU, Zhaofa ZHOU, Zhenjun CHANG, Qi GUO. Initial alignment method based on information reuse and algorithm fusion[J]. Systems Engineering and Electronics, 2021, 43(5): 1310-1315.
share this article
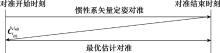
Fig.1
Initial alignment scheme based on information reuse"
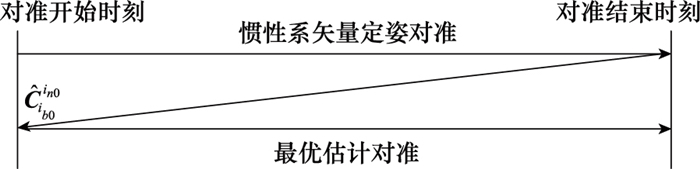

Fig.2
Indoor static base alignment test equipment"
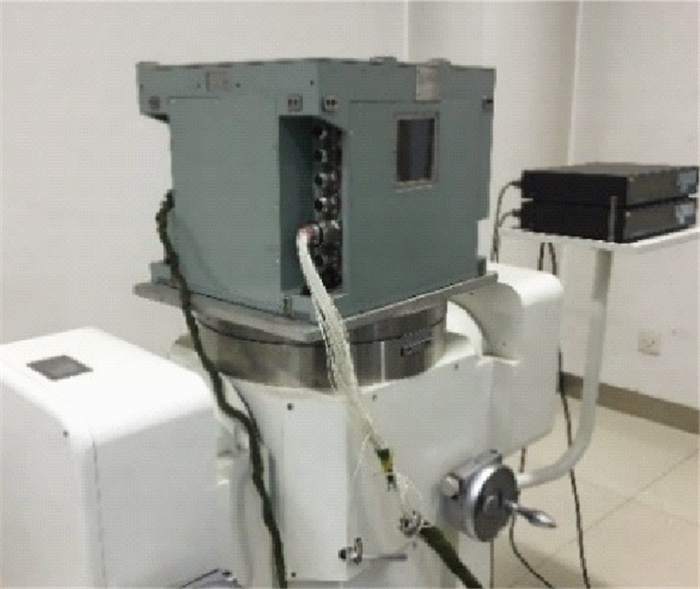
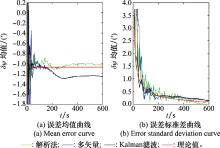
Fig.3
Test results of initial alignment turntable"

Fig.4
Vehicle alignment test equipment"

Table 1
Alignment results of different algorithms (°)"
| ψ | 多矢量 | 估计1 | 估计2 | 融合算法 |
| 1 | 9.650 7 | 9.655 9 | 9.652 7 | 9.651 7 |
| 2 | 9.638 4 | 9.625 7 | 9.631 3 | 9.634 9 |
| 3 | 9.667 9 | 9.698 2 | 9.676 1 | 9.672 0 |
| 4 | 9.650 0 | 9.678 4 | 9.658 5 | 9.654 2 |
| 5 | 9.647 4 | 9.649 8 | 9.645 9 | 9.646 7 |
| 6 | 9.639 1 | 9.642 0 | 9.639 0 | 9.639 1 |
| 7 | 9.641 1 | 9.640 7 | 9.644 1 | 9.642 6 |
| 8 | 9.632 6 | 9.616 0 | 9.629 4 | 9.631 0 |
| 9 | 9.633 4 | 9.629 8 | 9.638 7 | 9.636 0 |
| 10 | 9.640 3 | 9.645 5 | 9.643 1 | 9.641 7 |
| 均值 | 9.644 1 | 9.648 2 | 9.645 9 | 9.645 0 |
| 1σ (′) | 0.630 0 | 1.480 0 | 0.830 0 | 0.720 0 |
| 1 |
CHANG L B , HE H Y , QIN F J . In-motion initial alignment for odometer-aided strapdown inertial navigation system based on attitude estimation[J]. IEEE Sensors Journal, 2017, 17 (3): 766- 773.
doi: 10.1109/JSEN.2016.2633428 |
| 2 | WU Y , PAN X . Velocity/position integration formula part Ⅰ: application to in-flight coarse alignment[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 49 (2): 1006- 1023. |
| 3 | WU Y , PAN X . Velocity/position integration formula part Ⅱ: application to strapdown inertial navigation computation[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 49 (2): 1024- 1034. |
| 4 | CHANG L B , LI J S , CHEN S Y . Initial alignment by attitude estimation for strapdown inertial navigation systems[J]. IEEE Trans.on Instrumentation & Measurement, 2015, 64 (3): 784- 794. |
| 5 |
SILVA F O , HEMERLY E M , LEITE F W . On the error state selection for stationary SINS alignment and calibration Kalman filters-part Ⅰ: estimation algorithms[J]. Aerospace Science and Technology, 2017, 61, 45- 56.
doi: 10.1016/j.ast.2016.11.019 |
| 6 |
XU X , XU X S , ZHANG T , et al. ln-Motion Filter-QUEST alignment for strapdown inertial navigation systems[J]. IEEE Trans.on Instrumentation and Measurement, 2018, 67 (8): 1979- 1993.
doi: 10.1109/TIM.2018.2805978 |
| 7 | 严恭敏, 陈若彤, 郭鹍. 多矢量定姿的SVD和QUEST算法等价性分析[J]. 中国惯性技术学报, 2019, 27 (5): 568- 572. |
| YAN G M , CHEN R T , GUO K . Equivalence analysis between SVD and QUEST for multi-vector attitude determination[J]. Journal of Chinese Inertial Technology, 2019, 27 (5): 568- 572. | |
| 8 | CHANG L B , HU B Q , LI Y . Backtracking integration for fast attitude determination-based initial alignment[J]. IEEE Trans.on Instrumentation & Measurement, 2015, 64 (3): 795- 803. |
| 9 |
CHE Y T , WANG Q Y , GAO W , et al. An improved inertial frame alignment algorithm based on horizontal alignment information for marine SINS[J]. Sensors, 2015, 15 (10): 25520- 25545.
doi: 10.3390/s151025520 |
| 10 | MARKLEY F L . Attitude determination using vector observations: a fast optimal matrix algorithm[J]. The Journal of Astronautical Sciences, 1993, 41 (2): 261- 280. |
| 11 |
LIU X X , XU X S , ZHAO Y , et al. An initial alignment method for strapdown gyrocompass based on gravitational apparent motion in inertial frame[J]. Measurement, 2014, 55, 593- 604.
doi: 10.1016/j.measurement.2014.06.004 |
| 12 |
LIU Y T , XU X S , LIU X X , et al. A self-alignment algorithm for SINS based on gravitational apparent motion and sensor data de-nosing[J]. Sensors, 2015, 15 (5): 9827- 9853.
doi: 10.3390/s150509827 |
| 13 | 常振军, 张志利, 周召发, 等. 捷联惯导行进间对准位置更新与误差分析[J]. 系统工程与电子技术, 2020, 42 (1): 172- 178. |
| CHANU Z J , ZHANU Z L , ZHOU Z F , et al. Position updating and error analysis of SINS alignment for moving base[J]. Systems Engineering and Electronics, 2020, 42 (1): 172- 178. | |
| 14 | GAO F Q, DING C H, LIU J F. Initial alignment of strap down inertial navigation system using Kalman filter[C]//Proc. of the International Conference on Computer Application and System Modeling, 2010: 629-633. |
| 15 | MA Y F. Application of fault tolerant and federated strong tracking Kalman algorithm in integrated navigation system[C]//Proc. of the IEEE Conference on Consumer Electronics, Communications and Networks, 2011: 3946-3949. |
| 16 | 王琦, 高春峰, 应智慧, 等. 捷联惯导系统单位置初始对准可观测性分析[J]. 中国激光, 2018, 45 (1): 24- 29. |
| WANG Q , GAO C F , YING Z H , et al. Observability analysis of fixed position initial alignment of strapdown inertial navigation system[J]. Chinese Journal of Lasers, 2018, 45 (1): 24- 29. | |
| 17 |
LI J L , WANG Y , GU B , et al. State parameter adjustment filtering method of airborne POS based on instantaneous observable degree model[J]. IEEE Trans.on Insfirurree-nlafiion and Measurement, 2018, 67 (9): 2153- 2159.
doi: 10.1109/TIM.2018.2811262 |
| 18 |
SILVA F O , HEMERLY E M , LEITE F W . On the error state selection for stationary sins alignment and calibration Kalman filters-part Ⅱ: observability/estimability analysis[J]. Sensors, 2017, 17 (3): 439.
doi: 10.3390/s17030439 |
| 19 | 高亢, 任顺清, 陈希军, 等. 车载激光捷联惯导系统初始对准可观测性分析[J]. 中国激光, 2018, 45 (12): 47- 53. |
| GAO K , REN S Q , CHEN X J , et al. Observability analysis of vehicle-based-laser strapdown inertial navigation system initial alignment[J]. Chinese Journal of Lasers, 2018, 45 (12): 47- 53. | |
| 20 |
XU J N , HE H Y , QIN F J , et al. A novel autonomous initial alignment method for strap-down inertial navigation system[J]. IEEE Trans.on Instrumentation and Measurement, 2017, 66 (9): 2274- 2282.
doi: 10.1109/TIM.2017.2692311 |
| 21 |
LIU X X , XU X S , WANG L H , et al. A fast compass alignment method for SINS based on saved data and repeated navigation solution[J]. Measurement, 2013, 46 (10): 3836- 3846.
doi: 10.1016/j.measurement.2013.07.013 |
| 22 |
LIU X X , XU X S , LIU Y T , et al. A fast and high-accuracy transfer alignment method between M/S INS for ship based on iterative calculation[J]. Measurement, 2014, 51, 297- 309.
doi: 10.1016/j.measurement.2014.02.019 |
| 23 |
LI W L , WU W Q , WANG J L , et al. A novel backtracking navigation scheme for autonomous underwater vehicles[J]. Measurement, 2014, 47, 496- 504.
doi: 10.1016/j.measurement.2013.09.022 |
| 24 | YU H P , WU W Q , WU M P , et al. Stochastic observability-based analytic optimization of SINS multiposition alignment[J]. IEEE Trans.on Aerospace and Electronic Systems, 2015, 31 (3): 2181- 2192. |
| 25 | WAHBA G . A least squares estimate of satellite attitude[J]. SIAM Review, 1965, 7 (3): 409- 409. |
| 26 |
WU J , ZHOU Z B , GAO B , et al. Fast linear quaternion attitude estimator using vector observations[J]. IEEE Trans.on Automation Science and Engineering, 2018, 15 (1): 307- 319.
doi: 10.1109/TASE.2017.2699221 |
| 27 | SILSON P M G . Coarse alignment of a ship's strapdown inertial attitude reference system using velocity loci[J]. IEEE Trans.on Aerospace and Electronic Systems, 2011, 60 (6): 1930- 1941. |
| 28 | MARKLEY F L , CRASSIDIS J I . Fundamentals of spacecraft attitude determination and control[M]. New York: Springer, 2014. |
| 29 | WU M P , WU Y X , HU X P , et al. Optimization-based alignment for inertial navigation systems; theory and algorithm[J]. Aerospace Science and Technology, 2011, 15 (1): 1- 17. |
| 30 | 常振军, 张志利, 周召发, 等. 旋转捷联惯导抗晃动对准方法[J]. 系统工程与电子技术, 2019, 41 (9): 2087- 2091. |
| CHANU Z J , ZHANU Z L , ZHOU Z F , et al. Alignment method of rotating SINS with swinging base[J]. Systems Engineering and Electronics, 2019, 41 (9): 2087- 2091. |
| [1] | Zhe LIANG, Zhaofa ZHOU, Zhihao XU, Wenting LYU, Hui DUAN. Angular rate attitude algorithm based on multi-interval information correction [J]. Systems Engineering and Electronics, 2022, 44(5): 1636-1643. |
| [2] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| [3] | Renjie ZHAO, Kailong LI, Baiqing HU, Jiayu TIAN. SINS initial alignment algorithm based on improved quaternion damping error model [J]. Systems Engineering and Electronics, 2021, 43(11): 3330-3337. |
| [4] | Shiwen HAO, Zhili ZHANG, Zhaofa ZHOU, Zhenjun CHANG, Xianyi LIU. Influence of gravity disturbance on initial alignment of inertial navigation system [J]. Systems Engineering and Electronics, 2020, 42(7): 1575-1581. |
| [5] | Zhenjun CHANG, Zhili ZHANG, Zhaofa ZHOU, He CHEN. Position updating and error analysis of SINS alignment for moving base [J]. Systems Engineering and Electronics, 2020, 42(1): 172-178. |
| [6] | CHANG Zhenjun, ZHANG Zhili, ZHOU Zhaofa, CHEN He, ZHAO Junyang. Alignment method of rotating SINS with swinging base [J]. Systems Engineering and Electronics, 2019, 41(9): 2087-2091. |
| [7] | WU Huali, XIAO Zhicai, ZHOU Dawang, WANG Lingling. SINS installation error matrix decoupling method based on matrix decomposition [J]. Systems Engineering and Electronics, 2018, 40(5): 1091-1097. |
| [8] | CHEN He, ZHANG Zhili, ZHOU Zhaofa, LIU Pengpeng, ZHAO Junyang. Equivalence analysis between two quaternion based coarse alignment algorithms for SINS with inertial frame [J]. Systems Engineering and Electronics, 2018, 40(5): 1098-1103. |
| [9] | WANG Jian, ZHANG Tao, TONG Jinwu, YAN Yaxiong. Application of KF/UPF in initial alignment of large azimuth misalignment of SINS#br# [J]. Systems Engineering and Electronics, 2018, 40(12): 2775-2781. |
| [10] |
BEN Yueyang, SUN Yan, WANG Xiangyu, CHEN Hainan, YANG Lisheng, LIU Zhenghao.
Method of coarse alignment during voyages of vessel SINS aided by satellites
[J]. Systems Engineering and Electronics, 2018, 40(12): 2797-2803.
|
| [11] | CHENG Jianhua, MOU Hongjie, SUN Xiangyu, CHEN Daidai. Dual axis rotational modulation method based on SINS tetrahedron redundancy configuration [J]. Systems Engineering and Electronics, 2017, 39(8): 1801-1807. |
| [12] | XUE Haijian, GUO Xiaosong, ZHOU Zhaofa. SINS initial alignment method based on adaptive multiple fading factors Kalman filter [J]. Systems Engineering and Electronics, 2017, 39(3): 620-626. |
| [13] | HUANG Xiang-yuan, TANG Xia-qing, WU Meng. Research on moving base initial alignment of SINS/OD with reduced dimension CKF and smoother [J]. Systems Engineering and Electronics, 2016, 38(9): 2135-2141. |
| [14] | CHENG Jianhua, WANG Tongda, SONG Chunyu, YU Dongwei. Modified adaptive filter algorithm for shipborne SINS transfer alignment [J]. Systems Engineering and Electronics, 2016, 38(3): 638-643. |
| [15] | ZHAO Lin, LI Jiu-shun, CHENG Jian-hua, JIA Chun, WANG Qiu-fan. Schuler oscillation restriction of shipborne SINS#br# based on delayed alignment [J]. Systems Engineering and Electronics, 2016, 38(10): 2375-2380. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||