Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (11): 3820-3826.doi: 10.12305/j.issn.1001-506X.2024.11.24
• Guidance, Navigation and Control • Previous Articles Next Articles
Incremental dynamic inverse control based on improved tracking differentiator
Shikang FU1,2, Junhui LIU1,2,*, Hao CHEN3, Jiayuan SHAN1,2
- 1. School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China
2. Key Laboratory of Dynamics and Control of Flight Vehicle, Ministry of Education, Beijing Institute of Technology, Beijing 100081, China
3. Beijing Institute of Electronic Engineering, Beijing 100093, China
-
Received:2023-12-18Online:2024-10-28Published:2024-11-30 -
Contact:Junhui LIU
CLC Number:
Cite this article
Shikang FU, Junhui LIU, Hao CHEN, Jiayuan SHAN. Incremental dynamic inverse control based on improved tracking differentiator[J]. Systems Engineering and Electronics, 2024, 46(11): 3820-3826.
share this article

Fig.1
Block diagram of high angle of attack control for aircraft based on tracking differentiator"
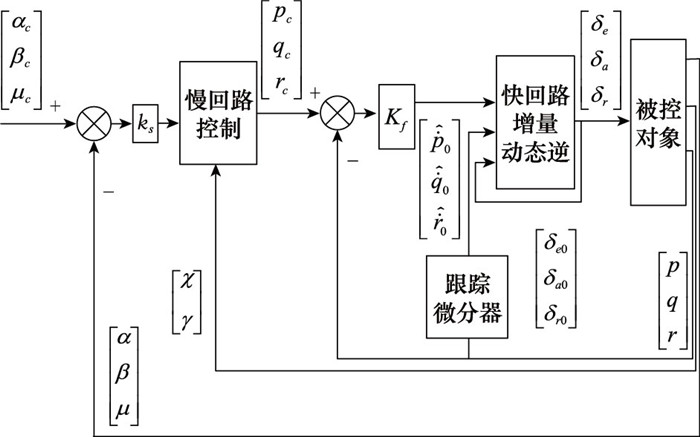

Fig.2
Comparison of effect of tracking differentiators on tracking input values"


Fig.3
Comparison of differential signals for tracking differentiators"


Fig.4
Aerodynamic angle tracking curve for aerodynamic parameters without perturbation"


Fig.5
Aerodynamic angle tracking curve under 30% perturbation of aerodynamic parameters"


Fig.6
Comparison diagram of aerodynamic angle signal tracking between two incremental dynamic inversion methods"

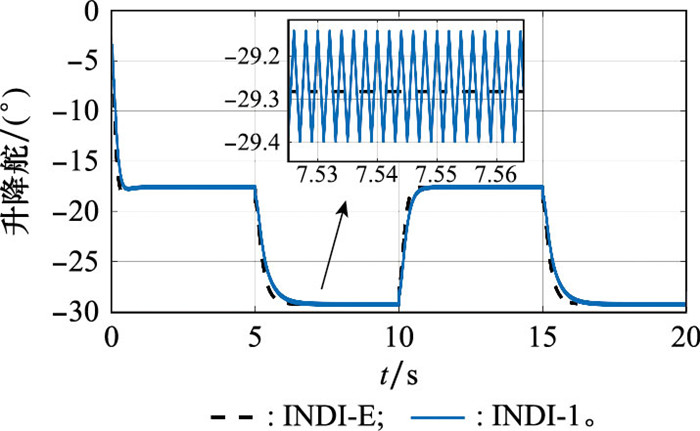
Fig.7
Comparison of incremental dynamic inverse control effects"
| 1 | LEE Y G, JONGHO P, KIM Y. High angle of attack missile control for agile turn based on reinforcement learning[C]//Proc. of the AIAA SCITECH Forum, 2024: 2391-2400. |
| 2 |
LIU J J , SUN M W , CHEN Z Q , et al. High AOA decoupling control for aircraft based on ADRC[J]. Journal of Systems Engineering and Electronics, 2020, 31 (2): 393- 402.
doi: 10.23919/JSEE.2020.000016 |
| 3 |
LIU J J , SUN M W , CHEN Z Q , et al. Super-twisting sliding mode control for aircraft at high angle of attack based on finite-time extended state observer[J]. Non-linear Dynamics, 2020, 99 (4): 2785- 2799.
doi: 10.1007/s11071-020-05481-1 |
| 4 | MUKHERJEE B K, THOMAS P R, SINHA M. Automatic recovery of a combat aircraft from a completed Cobra and Herbst maneuver: a sliding mode control based scheme[C]//Proc. of the IEEE Indian Control Conference, 2016: 1247-1257. |
| 5 | LOMBAERTS T, KANESHIGE J, SCHUET S, et al. Dynamic inversion based full envelope flight control for an eVTOL vehicle using a unified framework[C]//Proc. of the AIAA SCITECH Forum, 2020: 1619-1627. |
| 6 | LUNGU M . Auto-landing of UAVs with variable center of mass using the backstepping and dynamic inversion control[J]. Aerospace Science and Technology, 2020, 11 (2): 103- 112. |
| 7 |
SAHA D , VALASEK J , LESHIKAR C , et al. Multiple-timescale nonlinear control of aircraft with model uncertainties[J]. Journal of Guidance, Control, and Dynamics, 2020, 43 (3): 536- 552.
doi: 10.2514/1.G004303 |
| 8 | STEVEN T , THEODOULIS S , THAI S , et al. Nonlinear dynamic inversion flight control design for guided projectiles[J]. Journal of Guidance, Control, and Dynamics, 2020, 43 (12): 11- 16. |
| 9 |
WANG X R , MKHOYAN T , BREUKER D R . Nonlinear incremental control for flexible aircraft trajectory tracking and load alleviation[J]. Journal of Guidance, Control, and Dynamics, 2022, 45 (1): 39- 57.
doi: 10.2514/1.G005921 |
| 10 | LEE J , KIM Y . Neural network-based nonlinear dynamic inversion control of variable-span morphing aircraft[J]. Journal of Aerospace Engineering, 2020, 234 (10): 1624- 1437. |
| 11 | SMEUR E , CHU Q , CROON G C . Adaptive incremental nonlinear dynamic inversion for attitude control of micro air vehicles[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (3): 11- 22. |
| 12 | VANKAMPEN E, POLLACK T. Robust stability and performance analysis of incremental dynamic inversion-based flight control laws[C]//Proc. of the AIAA SCITECH Forum, 2022: 105-116. |
| 13 | SAFWAT E, KAMEL A, ABBAS M K. Robust nonlinear flight controller for small unmanned aircraft vehicle based on incremental backstepping[C]//Proc. of the AIAA SCITECH Forum, 2020: 154-169. |
| 14 | LIU J H , SHAN J Y , WANG J N , et al. Incremental sliding-mode control and allocation for morphing-wing aircraft fast maneuverings[J]. Aerospace Science and Technology, 2022, 131 (2): 56- 66. |
| 15 |
郑积仕, 蒋新华, 陈兴武. 增量非线性动态逆小型无人机速度控制[J]. 系统工程与电子技术, 2013, 35 (9): 1923- 1927.
doi: 10.3969/j.issn.1001-506X.2013.09.20 |
|
ZHENG J S , JIANG X H , CHEN X W . Velocity control design for the small UAV based on the incremental nonlinear dynamic inversion[J]. Journal of Systems Engineering and Electronics, 2013, 35 (9): 1923- 1927.
doi: 10.3969/j.issn.1001-506X.2013.09.20 |
|
| 16 |
WANG X R , ERIK K P , CHU Q P , et al. Stability analysis for incremental nonlinear dynamic inversion control[J]. Journal of Guidance, Control, and Dynamics, 2019, 42 (5): 1116- 1129.
doi: 10.2514/1.G003791 |
| 17 | GRONDMAN F, LOOYE G H N, KUCHAR R O, et al. Design and flight testing of incremental nonlinear dynamic inversion-based control laws for a passenger aircraft[C]//Proc. of the AIAA Guidance Navigation and Control Conference, 2018: 385-387. |
| 18 | POLLACK T S C, LOOYE G H N, LINDEN F L J. Design and flight testing of flight control laws integrating incremental nonlinear dynamic inversion and servo current control[C]//Proc. of the AIAA SCITECH Forum and Exposition, 2019: 26-49. |
| 19 |
EZRA T , SERTAC K . Accurate tracking of aggressive quadrotor trajectories using incremental nonlinear dynamic inversion and differential flatness[J]. IEEE Trans.on Control Systems Technology, 2021, 29 (3): 1203- 1218.
doi: 10.1109/TCST.2020.3001117 |
| 20 |
SIMPLICIO P , PAVEL M D , VAN KAMPEN E , et al. An acce-leration measurements-based approach for helicopter nonlinear flight control using incremental nonlinear dynamic inversion[J]. Control Engineering Practice, 2013, 21 (8): 1065- 1077.
doi: 10.1016/j.conengprac.2013.03.009 |
| 21 | 刘达, 赵暾, 张占月. 高超声速飞行器三通道耦合制导律与鲁棒控制律设计[J]. 战术导弹技术, 2023, 6 (5): 97-103, 123. |
| LIU D , ZHAO T , ZHANG Z Y . A design of three-channel coupling guidance and robust control system for hypersonic vehicle[J]. Tactical Missile Technology, 2023, 6 (5): 97-103, 123. | |
| 22 | LI Y , LIU X X , LU P , et al. Angular acceleration estimation-based incremental nonlinear dynamic inversion for robust flight control[J]. Control Engineering Practice, 2021, 10 (2): 117- 129. |
| 23 | LIU J , SUN L G , TAN W Q , et al. Finite time observer based incremental nonlinear fault-tolerant flight control[J]. Aerospace Science and Technology, 2020, 11 (2): 104- 116. |
| 24 | CERVANTES T J L , CHOI S H , KIM B S . Flight control design using incremental nonlinear dynamic inversion with fixed-lag smoothing estimation[J]. International Journal of Aeronautical and Space Sciences, 2020, 20 (5): 120- 129. |
| 25 | 韩京清, 王伟. 非线性跟踪─微分器[J]. 系统科学与数学, 1994, (2): 177- 183. |
| HAN J Q , WANG W . Nonlinear tracking-differentiator[J]. System Science and Mathematics, 1994, (2): 177- 183. | |
| 26 | 董飞垚, 雷虎民, 李炯, 等. 带有跟踪微分器的导弹增量动态逆控制律设计[J]. 宇航学报, 2012, 33 (10): 1439- 1444. |
| DONG F Y , LEI H M , LI J , et al. Design of incremental dynamic inversion control law for missiles with tracking differentiator[J]. Journal of Astronautics, 2012, 33 (10): 1439- 1444. | |
| 27 | 史永丽, 侯朝桢. 改进的非线性跟踪微分器设计[J]. 控制与决策, 2008, (6): 647-650, 659. |
| SHI Y L , HOU C Z . Design of improved nonlinear tracking differentiator[J]. Control and Decision, 2008, (6): 647-650, 659. | |
| 28 | 张奕群, 董德发. 非线性跟踪-微分器噪声抑制能力的改进[C]// 1996中国控制与决策学术年会, 1997: 58-64. |
| ZHANG Y Q, DONG D F. Improvement of nonlinear tracking differentiator noise suppression ability[C]//Proc. of the 1996 China Academic Annual Conference on Control and Decision Making, 1997: 58-64. | |
| 29 | SINHA N K , ANANTHKRISHNAN N . Elementary flight dynamics with an introduction to bifurcation and continuation methods[M]. Boca Raton: Taylor and Francis Group, 2021. |
| 30 | HUANG Y Z , ZHANG Y , POOL D M , et al. Time-delay margin and robustness of incremental nonlinear dynamic inversion control[J]. Journal of Guidance, Control, and Dynamics, 2020, 45 (2): 394- 404. |
| 31 | ENNS D , BUGAJSKI D , HENDRICK R , et al. Dynamic inversion: an evolving methodology for flight control design[J]. International Journal of Control, 1994, 59 (1): 71- 91. |
| 32 | 秦天成, 刘世前, 桑元俊, 等. 基于增量动态逆的大型民用飞机容错控制策略[J]. 科学技术与工程, 2021, 21 (2): 839- 844. |
| QIN T C , LIU S Q , SANG Y J , et al. Fault tolerant strategy for a large civil aircraft based on incremental nonlinear dynamic inversion[J]. Science Technology and Engineering, 2021, 21 (2): 839- 844. |
| [1] | Zhongkai ZHAO, Zeyue GUAN, Hu LI. Nonlinear self-interference cancellation technique based on spline interpolation [J]. Systems Engineering and Electronics, 2024, 46(9): 2916-2925. |
| [2] | Ping YAN, Chaochang LI. Motion stability analysis of fin-controlled small supercavitating vehicle [J]. Systems Engineering and Electronics, 2024, 46(7): 2456-2464. |
| [3] | Cancan TAO, Rui ZHOU. A method of UAV motion control to optimize air-ground relay network [J]. Systems Engineering and Electronics, 2024, 46(5): 1712-1723. |
| [4] | Yang GUI, Bochao ZHENG, Peng GAO. Sliding mode attitude control of quadrotor UAV based on NESO-LFDC [J]. Systems Engineering and Electronics, 2024, 46(3): 1075-1083. |
| [5] | Zhengwei LIU, Ying CHEN, Yaobing LU. A study on high resolution radar tracking method for space target [J]. Systems Engineering and Electronics, 2024, 46(2): 488-496. |
| [6] | Kun WANG, Xinran DUAN, Zheng CHEN, Jun LI. Nonlinear optimal guidance method with constraints on overload and impact time [J]. Systems Engineering and Electronics, 2024, 46(2): 649-657. |
| [7] | Yingjie ZHANG, Hongmeng CHEN, Wenquan GAO, Jian LAN, Chunmao YE, Yan CHEN. High accuracy cooperative tracking and power allocation method in networked radar system [J]. Systems Engineering and Electronics, 2024, 46(11): 3726-3735. |
| [8] | Liyao WU, Xichao SU, Lei WANG, Zishuang PAN. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. |
| [9] | Zhongpu CUI, Songhu GE, Yaxing LI, Yu GUO, Jinling XING, Jin MENG. Partially decoupling based nonlinear digital interference cancellation algorithm [J]. Systems Engineering and Electronics, 2023, 45(4): 973-981. |
| [10] | Yang CHEN, Bo TIAN, Chunyang WANG, Jian GONG, Ming TAN, Yingjian ZHAO. FDA platform external interference suppression based on MVDR beamforming [J]. Systems Engineering and Electronics, 2023, 45(1): 32-40. |
| [11] | Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters [J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913. |
| [12] | Zilin HOU, Ting CHENG, Han PENG. GMPHD based on measurement conversion sequential filtering for maneuvering target tracking [J]. Systems Engineering and Electronics, 2022, 44(8): 2474-2482. |
| [13] | Xiaofeng ZHAO, Fei WU, Yebin XU, Jiahui NIU, Wei CAI, Zhili ZHANG. Evaluation method of infrared camouflage effect based on background restoration [J]. Systems Engineering and Electronics, 2022, 44(8): 2554-2561. |
| [14] | Sheng GAO, Guangfu MA, Yanning GUO. Fast reconstruction of multiple faults based on adaptive unknown input observer [J]. Systems Engineering and Electronics, 2022, 44(7): 2364-2373. |
| [15] | Yan JIN, Dadi ZHAO, Hongbing JI. Parameter estimation of LFM signals based on NAT functions in impulsive noise [J]. Systems Engineering and Electronics, 2022, 44(3): 762-770. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||