Systems Engineering and Electronics ›› 2026, Vol. 48 ›› Issue (1): 301-311.doi: 10.12305/j.issn.1001-506X.2026.01.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Radio frequency stealth oriented multi-UAV trajectory optimization method for cooperative area coverage
Zhengjie LI1,2, Guangyuan LIU1, Haowei ZHANG3,*, Bin LIU4, Cheng QI3
- 1. High Speed Aerodynamic Institute,China Aerodynamics Research and Development Center,Mianyang 621000,China
2. National Key Laboratory of Aerospace Physics in Fluids,Mianyang 621000,China
3. Air and Missile Defense College,Air Force Engineering University,Xi’an 710051,China
4. Joint Operations College,National Defense University,Beijing 100091,China
-
Received:2024-11-22Online:2026-01-25Published:2026-02-11 -
Contact:Haowei ZHANG
CLC Number:
Cite this article
Zhengjie LI, Guangyuan LIU, Haowei ZHANG, Bin LIU, Cheng QI. Radio frequency stealth oriented multi-UAV trajectory optimization method for cooperative area coverage[J]. Systems Engineering and Electronics, 2026, 48(1): 301-311.
share this article
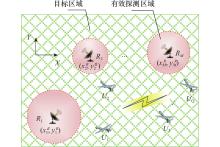
Fig.1
Illustration of multi-UAV cooperative search situation"

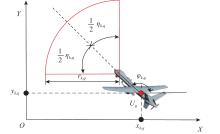
Fig.2
Illustration of trajectory control and maximum scan region"
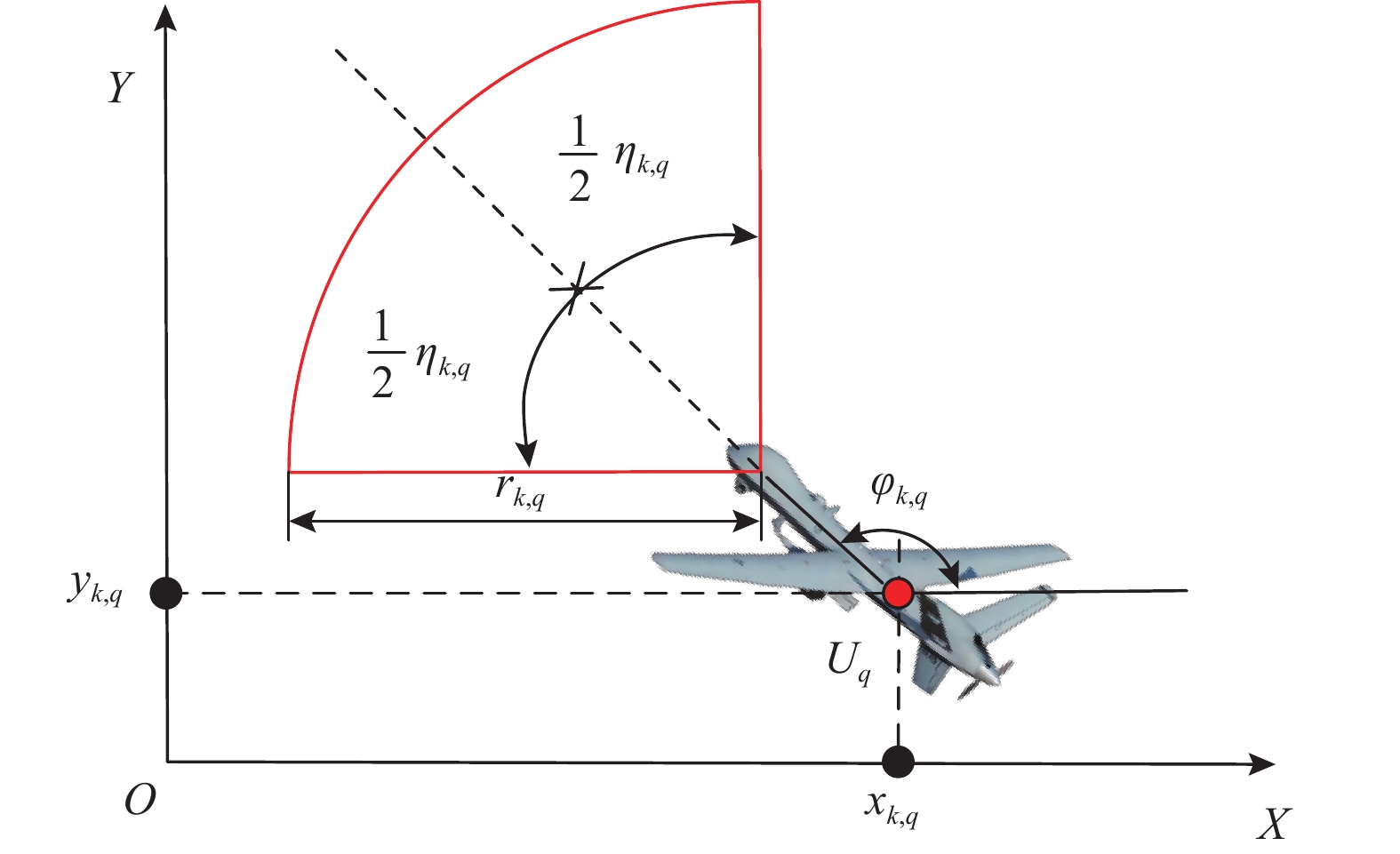
Table 1
Parameter setting of airborne radar and flight control"
| 参数 | 数值 | 参数 | 数值 | |
| 300 | 800 | |||
| 2.1 | 0.1 | |||
| 600 | 80 | |||
| 13 | 150 | |||
| 1 | 1 |
Table 2
Parameter setting of passive radar receiver"
| 参数 | 数值 | 参数 | 数值 | |
| 4 | 10 | |||
| 3 | 6 | |||
| 600 |
Fig.3
Illustration of trajectory control and situation of different UAV formations at the initial time"
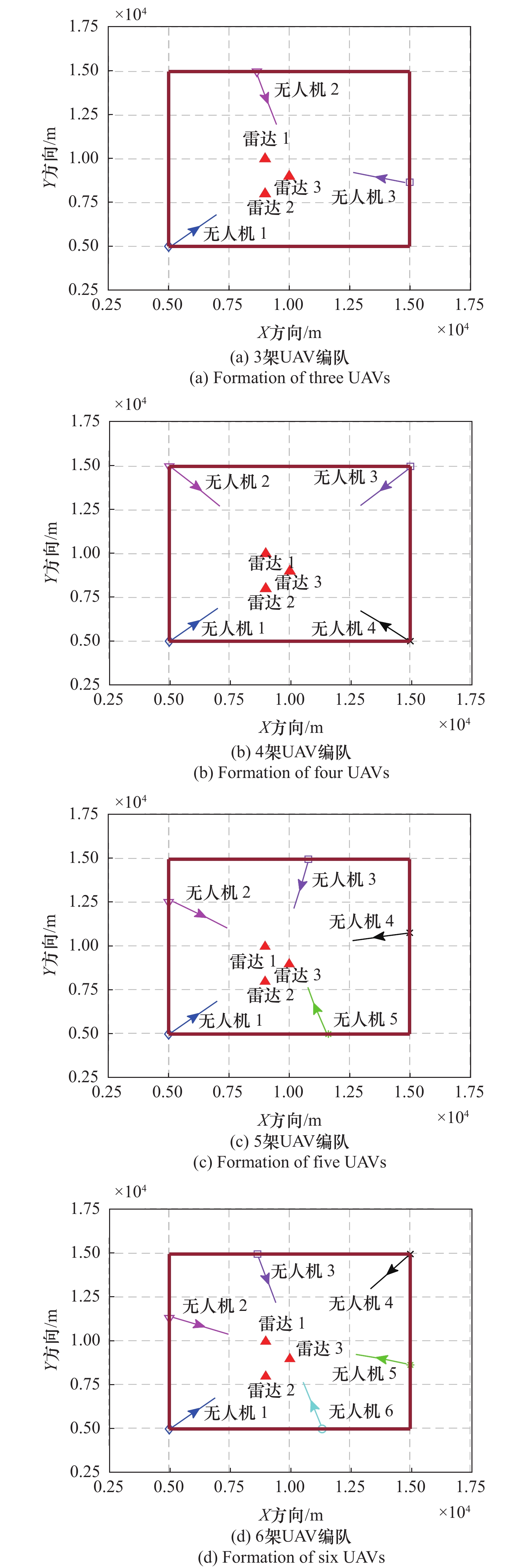
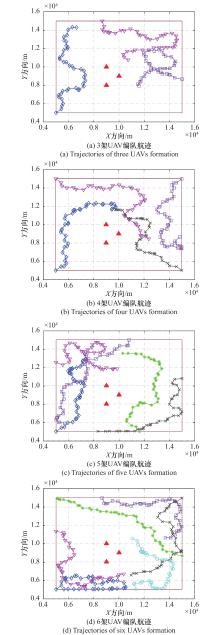
Fig.4
Illustration of approximate trajectories of different UAV formations in case 1"

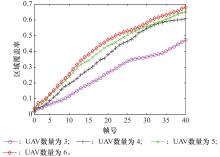
Fig.5
Area coverage rate curves of different UAV formations in case 1"
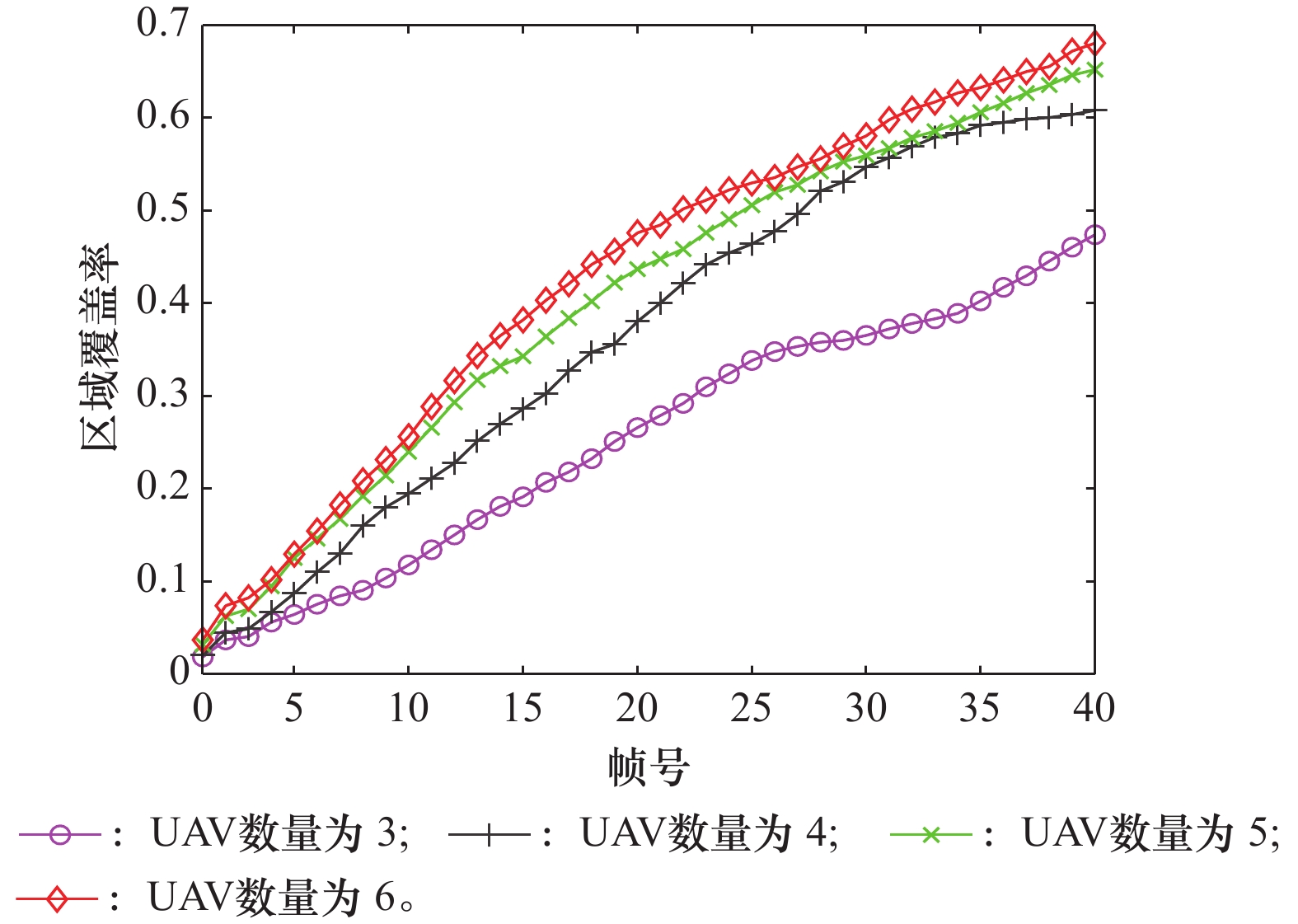
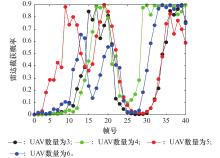
Fig.6
The maximum interception probability curves of different UAV formations in case 1"
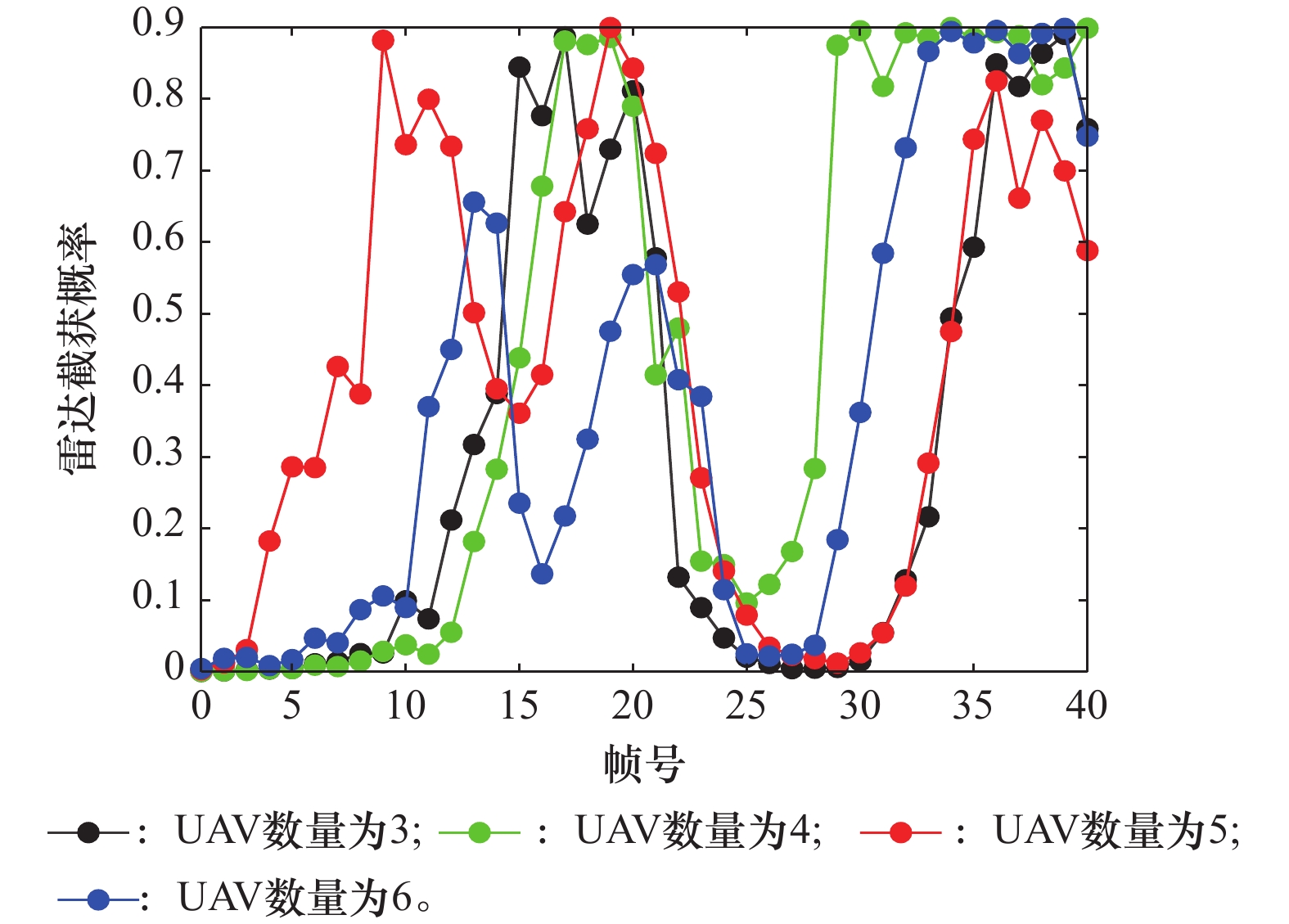
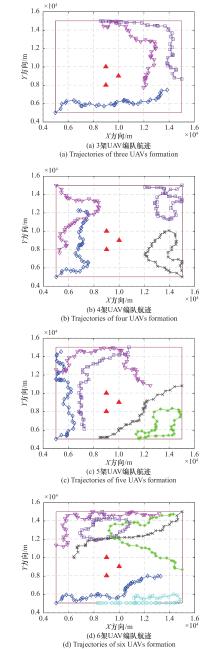
Fig.7
Illustration of approximate trajectories of different UAV formations in case 2"
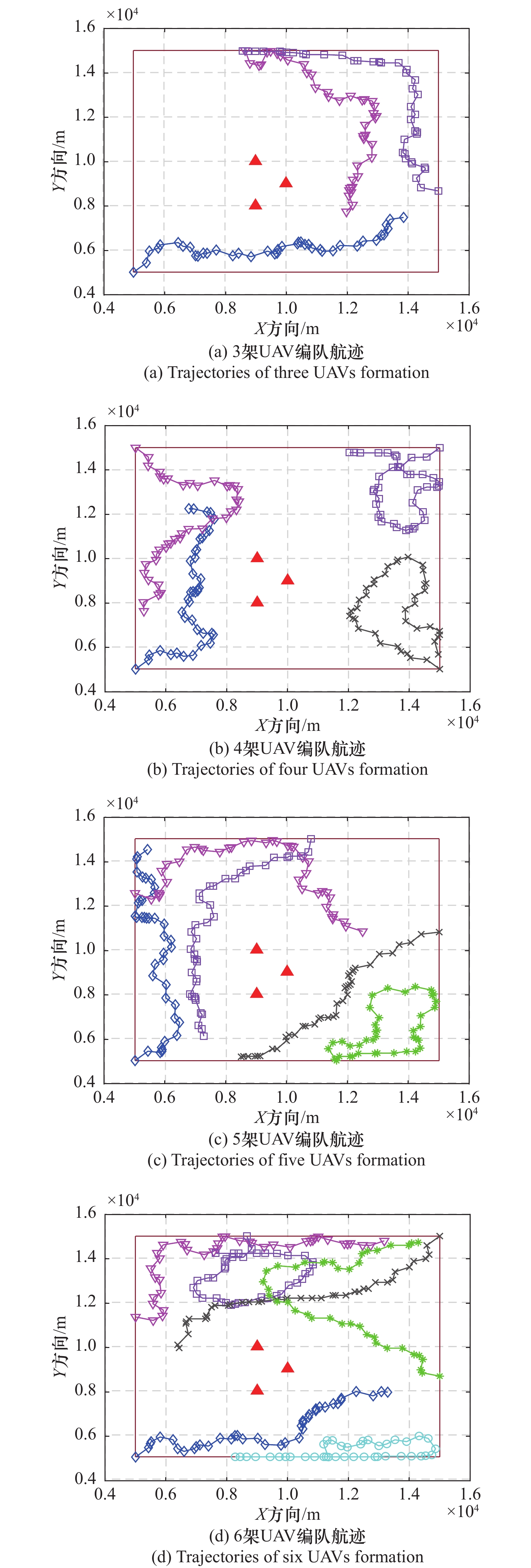
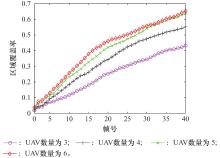
Fig.8
Area coverage rate curves of different UAV formations in case 2"
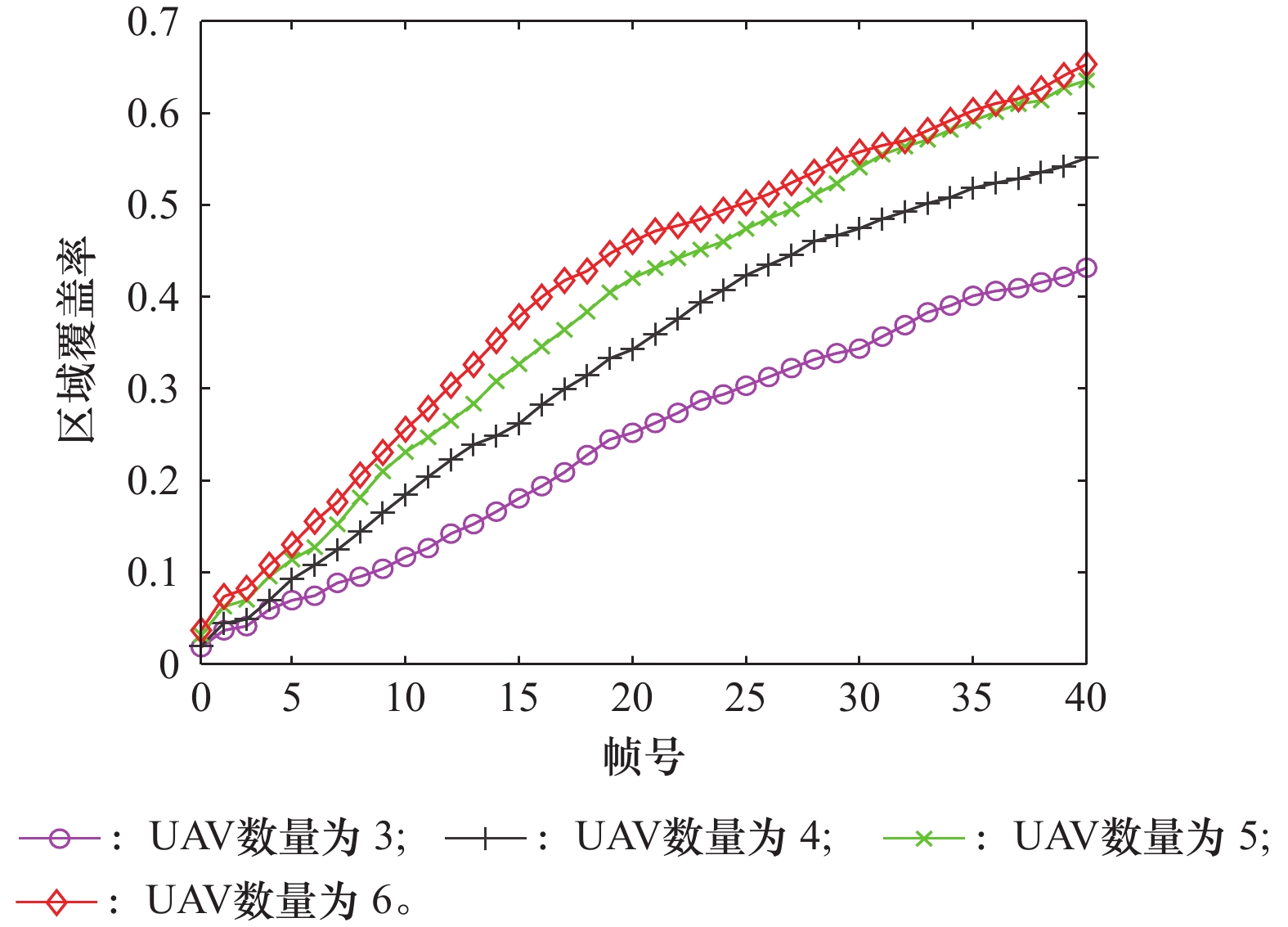
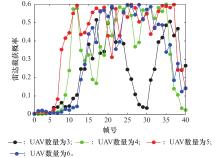
Fig.9
The maximum interception probability curves of different UAV formations in case 2"
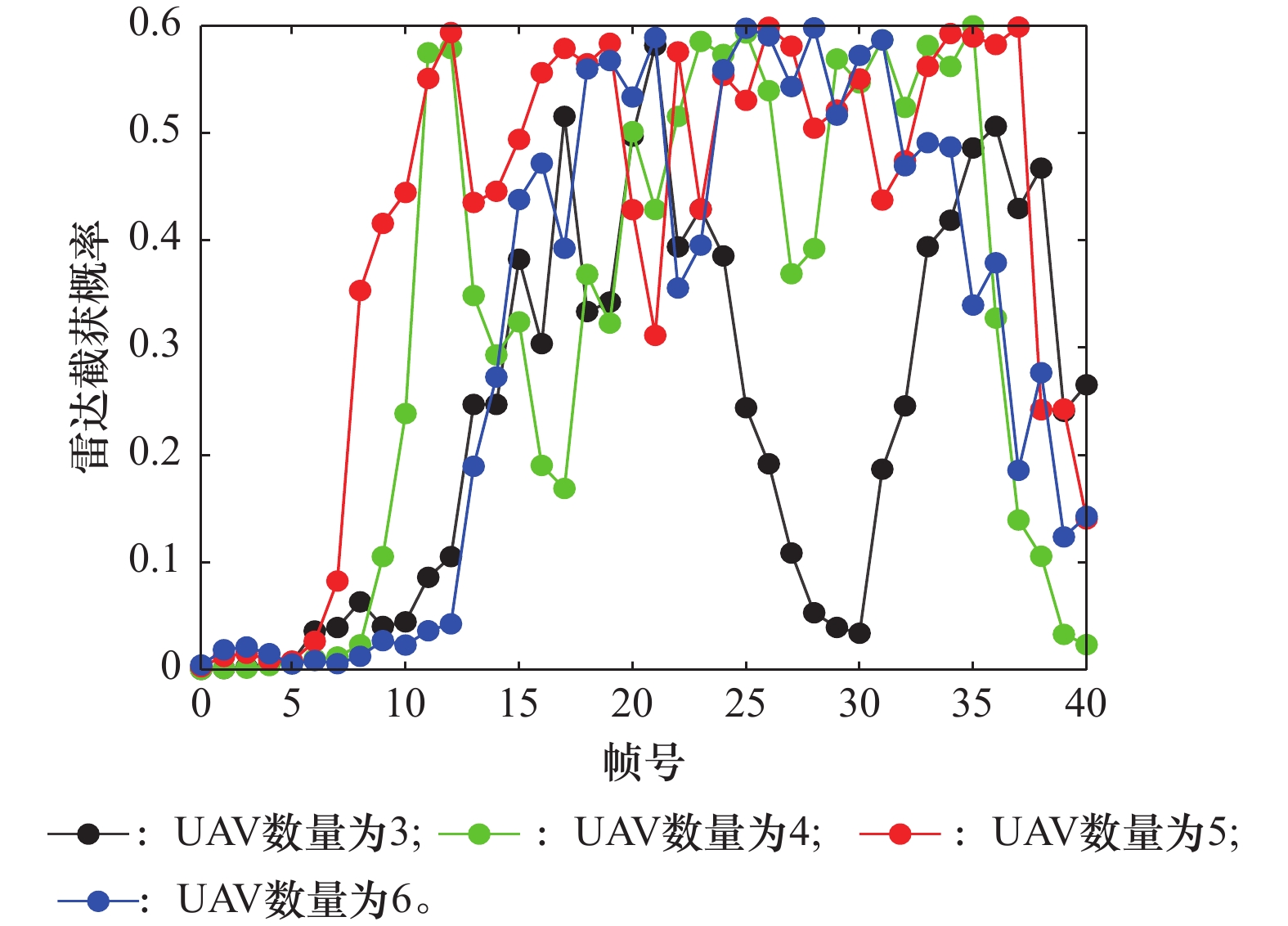
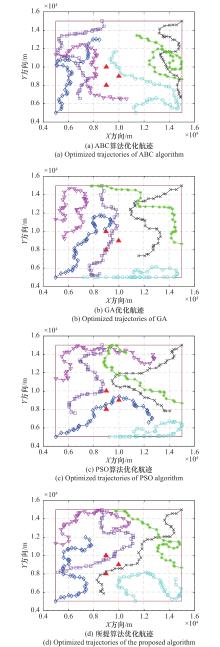
Fig.10
Illustration of approximate trajectories obtained by different optimization algorithms based on search performance-driven of six UAVs formation"
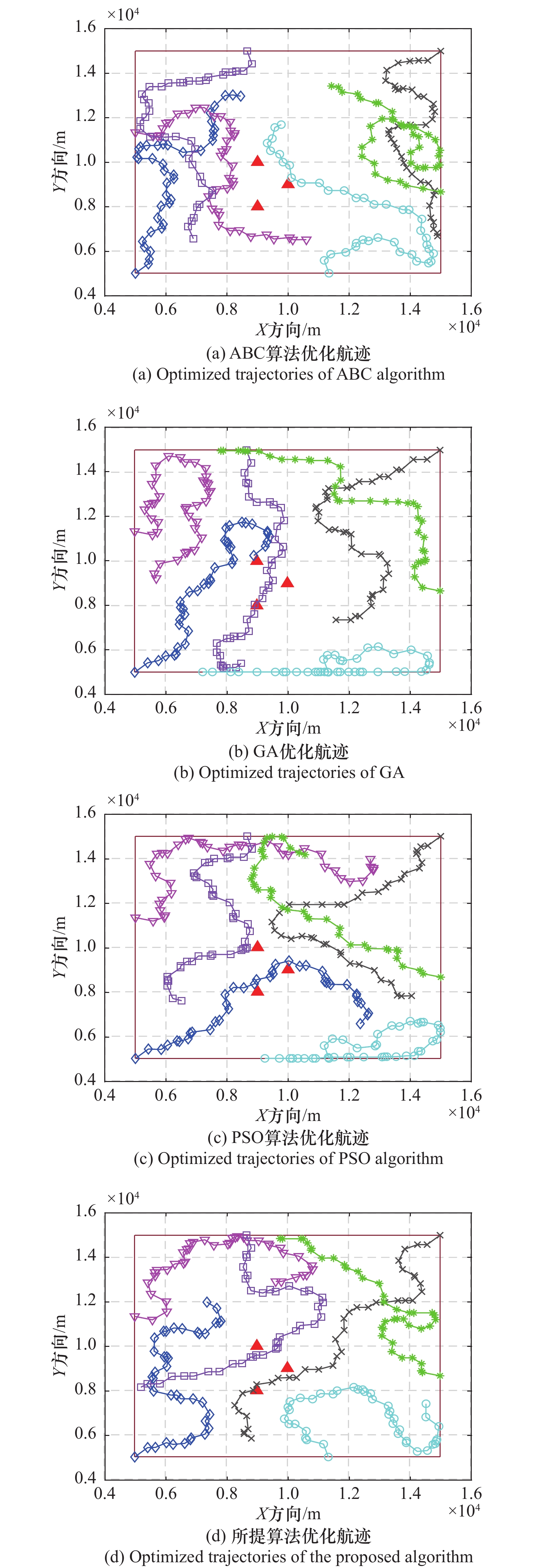
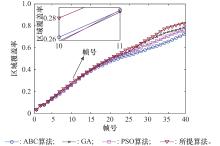
Fig.11
Area coverage rate curves of different optimization algorithms under search performance-driven model"
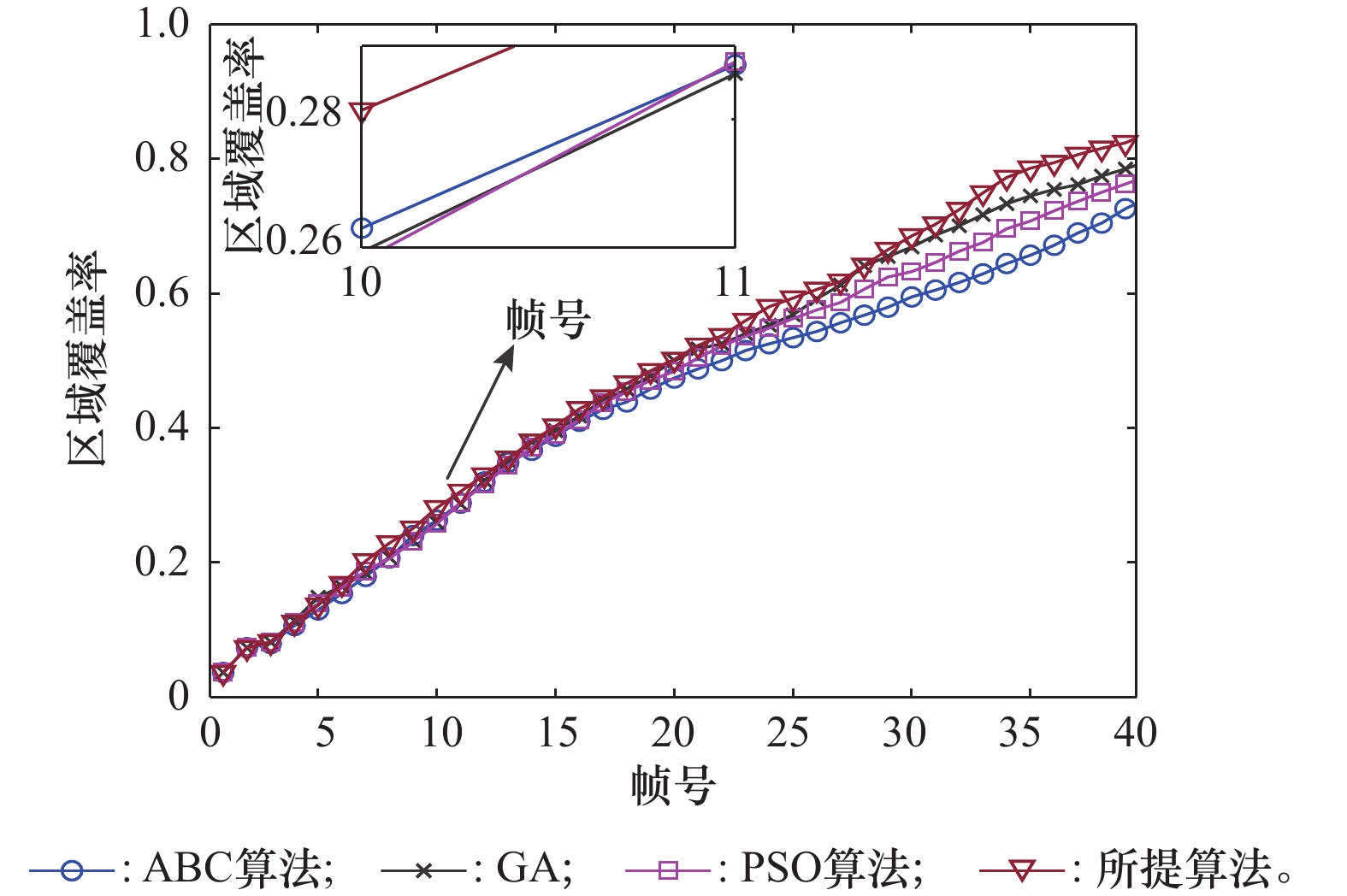
Fig.12
The maximum interception probability curves of different optimization algorithms under search performance-driven model"
| 1 | 兰天鸽, 陈璐. 面向无人机集群的协同识别资源管控设计[J]. 现代雷达, 2023, 45 (6): 63- 66. |
| LAN T G, CHEN L. Design of cooperative identification resource control for UAV swarm[J]. Modern Radar, 2023, 45 (6): 63- 66. | |
| 2 |
QIN P, FU Y, ZHANG J, et al. DRL-based resource allocation and trajectory planning for NOMA-enabled multi-UAV collaborative caching 6G network[J]. IEEE Trans. on Vehicular Technology, 2024, 73 (6): 8750- 8764.
doi: 10.1109/TVT.2024.3357086 |
| 3 | 周鹤翔, 徐扬, 罗德林. 针对动态目标的多无人机协同组合差分进化搜索方法[J]. 控制与决策, 2023, 38 (11): 3128- 3136. |
| ZHOU H X, XU Y, LUO D L. A composite differential evolution algorithm for multi-UAV cooperative dynamic target search[J]. Control and Decision, 2023, 38 (11): 3128- 3136. | |
| 4 | 严俊坤, 白舸, 黄佳沁, 等. 多机雷达协同区域动态覆盖航迹优化方法[J]. 雷达学报, 2023, 12 (3): 541- 549. |
| YAN J K, BAI G, HUANG J Q, et al. Flight path optimization method for dynamic area coverage based on multi-aircraft radars[J]. Journal of Radars, 2023, 12 (3): 541- 549. | |
| 5 | 黄湘松, 于日龙, 潘大鹏. 面向目标定位精度的主从式无人机编队航迹规划方法[J]. 电子学报, 2023, 51 (9): 2289- 2300. |
| HUANG X S, YU R L, PAN D P. Route planning method of master-slave UAV formation for target positioning accuracy[J]. Acta Electronica Sinica, 2023, 51 (9): 2289- 2300. | |
| 6 |
DING L T, SHI C G, ZHOU J J. Joint beam pattern design and online route planning for multitarget tracking in airborne radar system[J]. IEEE Trans. on Aerospace and Electronic Systems, 2024, 60 (1): 774- 788.
doi: 10.1109/TAES.2023.3328799 |
| 7 |
DAI J H, YAN J K, PU W Q, et al. Integrated trajectory planning and resource scheduling for multiple target tracking in airborne radar network[J]. IEEE Sensors Journal, 2024, 24 (9): 15434- 15445.
doi: 10.1109/JSEN.2024.3379384 |
| 8 | 韩统, 汤安迪, 周欢, 等. 基于LASSA算法的多无人机协同航迹规划方法[J]. 系统工程与电子技术, 2022, 44 (1): 233- 241. |
| HAN T, TANG A D, ZHOU H, et al. Multiple UAV cooperative path planning based on LASSA method[J]. Systems Engineering and Electronics, 2022, 44 (1): 233- 241. | |
| 9 |
程凝怡, 刘志乾, 李昱奇. 一种基于Dijkstra的多约束条件下智能飞行器航迹规划算法[J]. 西北工业大学学报, 2020, 38 (6): 1284- 1290.
doi: 10.1051/jnwpu/20203861284 |
|
CHENG N Y, LIU Z Q, LI Y Q. A Dijkstra-based algorithm for intelligent vehicle trajectory planning under multiple constraints[J]. Journal of Northwestern Polytechnical University, 2020, 38 (6): 1284- 1290.
doi: 10.1051/jnwpu/20203861284 |
|
| 10 | 王生印, 龙腾, 王祝, 等. 基于即时修复式稀疏A*算法的动态航迹规划[J]. 系统工程与电子学报, 2018, 40 (12): 2714- 2721. |
| WANG S Y, LONG T, WANG Z, et al. Dynamic path planning using anytime repairing sparse A* algorithm[J]. Systems Engineering and Electronics, 2018, 40 (12): 2714- 2721. | |
| 11 |
ZHANG R, GUO H, ANDRIUKAITIS D. , et al. Intelligent path planning by an improved RRT algorithm with dual grad map[J]. Alexandria Engineering Journal, 2024, 88, 91- 104.
doi: 10.1016/j.aej.2023.12.044 |
| 12 |
LI X, WANG L, WANG H, et al. A warm-started trajectory planner for fixed-wing unmanned aerial vehicle formation[J]. Applied Mathematical Modelling, 2023, 122, 200- 219.
doi: 10.1016/j.apm.2023.05.035 |
| 13 | 徐杰, 吴蔚楠, 龚春林. 多无人机任务分配/航迹规划的一体化求解方法[J]. 宇航学报, 2023, 44 (12): 1860- 1870. |
| XU J, WU W N, GONG C L. Integrated solution method for multi-UAV task assignment and trajectory planning[J]. Journal of Astronautics, 2023, 44 (12): 1860- 1870. | |
| 14 |
HAN Z L, CHEN M, SHAO S Y, et al. Improved artificial bee colony algorithm-based path planning of unmanned autonomous helicopter using multi-strategy evolutionary learning[J]. Aerospace Science and Technology, 2022, 122, 107374.
doi: 10.1016/j.ast.2022.107374 |
| 15 |
LIU J, ANAVATTI S, GARRATT M. Modified continuous ant colony optimisation for multiple unmanned ground vehicle path planning[J]. Expert Systems with Applications, 2022, 196, 116605.
doi: 10.1016/j.eswa.2022.116605 |
| 16 |
PHUNG M D, HA Q P. Safety-enhanced UAV path planning with spherical vector-based particle swarm optimization[J]. Applied Soft Computing Journal, 2021, 107, 107376.
doi: 10.1016/j.asoc.2021.107376 |
| 17 | 高泽伦, 郑少秋, 梁汝鹏, 等. 超网络体系下的打击目标优选模型[J]. 系统工程与电子技术, 2023, 46 (1): 182- 189. |
| GAO Z L, ZHENG S Q, LIANG R P, et al. Model of strike target preference under super-network system operation[J]. Systems Engineering and Electronics, 2023, 46 (1): 182- 189. | |
| 18 | 夏雨奇, 黄炎焱, 陈怡. 基于深度Q网络的无人车侦察路径规划[J]. 系统工程与电子技术, 2024, 46 (9): 3070- 3081. |
| XIA Y Q, HUANG Y Y, CHEN Y. Path planning for unmanned vehicle reconnaissance based on deep Q-network[J]. Systems Engineering and Electronics, 2024, 46 (9): 3070- 3081. | |
| 19 |
HU Z J, GAO X G, WAN K F, et al. Relevant experience learning: a deep reinforcement learning method for UAV autonomous motion planning in complex unknown environments[J]. Chinese Journal of Aeronautics, 2021, 34 (12): 187- 204.
doi: 10.1016/j.cja.2020.12.027 |
| 20 | 傅晋博, 张栋, 王孟阳, 等. 面向目标定位精度提升的无人机航迹规划[J]. 兵工学报, 2023, 44 (11): 3394- 3406. |
| FU J B, ZHANG D, WANG M Y, et al. Unmanned aerial vehicle path planning for improved target positioning accuracy[J]. Acta Armamentarii, 2023, 44 (11): 3394- 3406. | |
| 21 | 时晨光, 王奕杰, 代向荣, 等 面向目标跟踪的机载组网雷达辐射参数与航迹规划联合优化算法[J]. 雷达学报, 2022, 11(5): 778−793. |
| SHI C G, WANG Y J, DAI X R, et al. Joint transmit resources and trajectory planning for target tracking in airborne radar networks[J]. Journal of Radars, 2022, 11(5): 778−793. | |
| 22 |
SHI C G, WANG F, SELLATHURAI M, et al. Low probability of intercept-based optimal power allocation scheme for an integrated multistatic radar and communication system[J]. IEEE Systems Journal, 2020, 14 (1): 983- 994.
doi: 10.1109/JSYST.2019.2931754 |
| 23 | 刘永坚, 司伟建, 杨承志. 现代电子战支援侦察系统分析与设计[M]. 北京: 国防工业出版社, 2016: 43−47. |
| LIU Y J, SI W J, YANG C Z. Analysis and design of reconnaissance systems in modern ESM[M]. Beijing: National Defense Industry Press, 2016: 43−47. | |
| 24 | 陈小龙, 薛永华, 张林, 等. 机载雷达系统与信息处理[M]. 北京: 电子工业出版社, 2021: 150−163. |
| CHEN X L, XUE Y H, ZHANG L, et al. Airborne radar system and information processing[M]. Beijing: Publishing House of Electronics Industry, 2021: 150−163. | |
| 25 |
SHI C G, WANG Y J, SALOUS S, et al. Joint transmit resource management and waveform selection strategy for target tracking in distributed phased array radar network[J]. IEEE Trans. on Aerospace Electronic Systems, 2022, 58 (4): 2762- 2778.
doi: 10.1109/TAES.2021.3138869 |
| 26 | SINGH M, MAHAPATRA S. A quantum behaved particle swarm optimization for flexible job shop scheduling[J]. Computers & Industrial Engineering, 2016, 93, 36- 44. |
| 27 |
XU X, RONG H, TROVATI M, et al. CS-PSO: chaotic particle swarm optimization algorithm for solving combinatorial optimization problems[J]. Soft Computing, 2018, 22 (3): 783- 795.
doi: 10.1007/s00500-016-2383-8 |
| 28 |
ISMAIL K. A comprehensive analysis of grid-based wind turbine layout using an efficient binary invasive weed optimization algorithm with levy flight[J]. Expert Systems with Applications, 2022, 198, 116835.
doi: 10.1016/j.eswa.2022.116835 |
| 29 |
JENSI R, JIJI G W. An enhanced particle swarm optimization with Levy flight for global optimization[J]. Applied Soft Computing, 2016, 43, 248- 261.
doi: 10.1016/j.asoc.2016.02.018 |
| 30 | PANG H Y, FAN W F, LIU F, et al. Design of highly uniform field coils based on the magnetic field coupling model and improved PSO algorithm in atomic sensors[J]. IEEE Trans. on Instrumentation and Measurement, 2022, 71, 1- 11. |
| [1] | Xun HUANG, Boyi CHEN, Shouyong PENG, Yanbin LIU, Ben YANG, Haoran PANG. Trajectory optimization strategy for hypersonic vehicle under control constraints [J]. Systems Engineering and Electronics, 2025, 47(5): 1646-1654. |
| [2] | Ruibin ZHANG, Mengtao ZHU, Yunjie LI. Radar transmitting signal generation method for modulation recognition network stealth [J]. Systems Engineering and Electronics, 2024, 46(7): 2256-2268. |
| [3] | Jinwei JIA, Zhuangzhi HAN, Limin LIU, Hui XIE. Design principle of radar radio frequency stealth signal based on SDIF threshold failure [J]. Systems Engineering and Electronics, 2023, 45(6): 1693-1701. |
| [4] | Yao LIU, Yangsheng XIA, Jianmai SHI, Chao CHEN, Jincai HUANG. Path planning method for multi-area coverage by cooperated ground vehicle multi-drone [J]. Systems Engineering and Electronics, 2023, 45(5): 1380-1390. |
| [5] | Peichen WANG, Xunliang YAN, Kuan WANG, Xiong ZHENG. Robust trajectory optimization method based on stochastic response surface and polynomial chaos [J]. Systems Engineering and Electronics, 2023, 45(10): 3226-3239. |
| [6] | Shaolong YANG, Jin HUANG, Xianbo XIANG, Weichao LI. Optimization of USV area coverage path planning based on confidence ellipsoid [J]. Systems Engineering and Electronics, 2022, 44(7): 2263-2269. |
| [7] | Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon [J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310. |
| [8] | Tengafei ZHANG, Chunlin GONG, Hua SU, Pengfei XUE. Trajectory optimization based on heat-augmented model and analysis of thermal protection structure [J]. Systems Engineering and Electronics, 2022, 44(3): 929-938. |
| [9] | Xiaotong ZHAO, Jianjiang ZHOU. Improved MUSIC algorithm for MIMO radar with low intercept [J]. Systems Engineering and Electronics, 2022, 44(2): 490-497. |
| [10] | Shanyue DOU, Fei WANG, Weiqiang YU, Jianjiang ZHOU, Jun CHEN. Design of Doppler beam sharpening altimeter based on FDA [J]. Systems Engineering and Electronics, 2021, 43(9): 2383-2391. |
| [11] | Caihong YUE, Shengjing TANG, Jie GUO, Xiao WANG, Haoqiang ZHANG. Reentry trajectory rapid optimization for hypersonic telescopic deformable vehicle [J]. Systems Engineering and Electronics, 2021, 43(8): 2232-2243. |
| [12] | Chengxiu YANG, Qianzhe WANG, Jie ZHU, Ang LI. Evaluation method of radio frequency stealth performance of aircraft swarm in air combat mode [J]. Systems Engineering and Electronics, 2020, 42(12): 2811-2818. |
| [13] | Gaoyue WANG, Huijun ZHANG, Xian CHEN, Hao LI. Prediction method of spacecraft flight capability in atmospheric entry phase based on Gaussian process regression [J]. Systems Engineering and Electronics, 2020, 42(10): 2334-2339. |
| [14] | PANG Qiangwei, HU Yongjiang, LI Wenguang. UAV coverage track planning based on decomposition along the direction of perpendicular to the width of the area [J]. Systems Engineering and Electronics, 2019, 41(11): 2550-2558. |
| [15] | XU Qiangqiang, GE Jianquan, YANG Tao, TAO Ye, HUANG Hao. Multi-constraints glide trajectory design optimization toward penetration [J]. Systems Engineering and Electronics, 2018, 40(6): 1331-1336. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||