Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (6): 2002-2014.doi: 10.12305/j.issn.1001-506X.2025.06.28
• Guidance, Navigation and Control • Previous Articles Next Articles
Flight path following robust control method for stratospheric airship
Xinyun ZHAO, Chunlei XIE
- China Academy of Aerospace Science and Innovation, Beijing 100035, China
-
Received:2024-08-23Online:2025-06-25Published:2025-07-09 -
Contact:Chunlei XIE
CLC Number:
Cite this article
Xinyun ZHAO, Chunlei XIE. Flight path following robust control method for stratospheric airship[J]. Systems Engineering and Electronics, 2025, 47(6): 2002-2014.
share this article
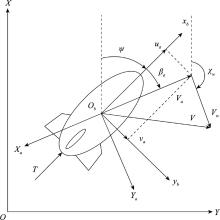
Fig.1
Force analysis diagram of stratospheric airship"
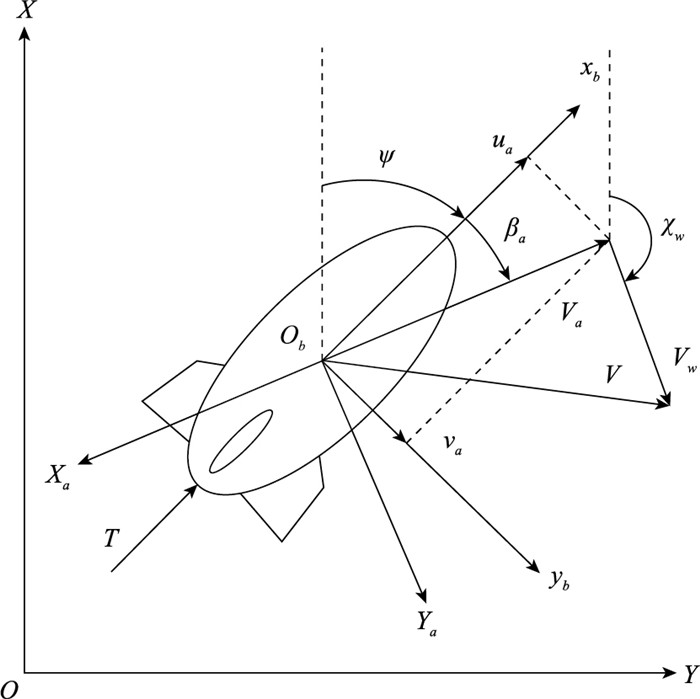
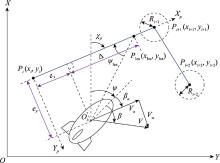
Fig.2
Guidance geometric relationship diagram of stratospheric airship"
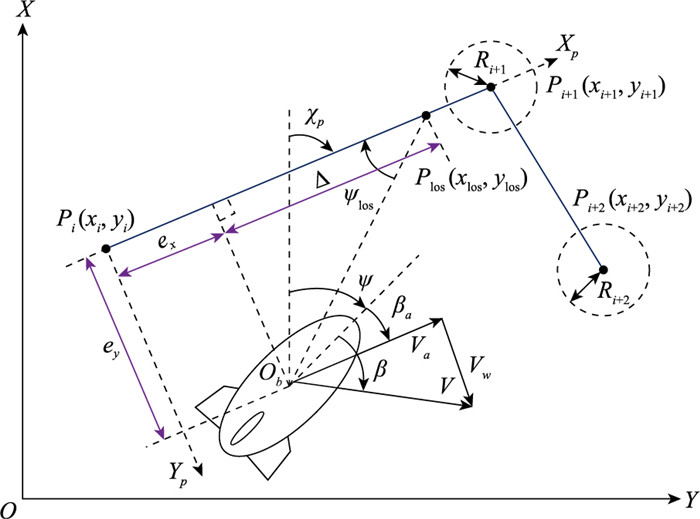
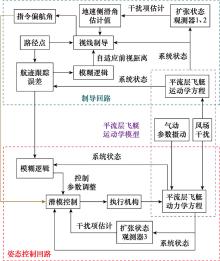
Fig.3
Principle block diagram of flight path following control of stratospheric airship"
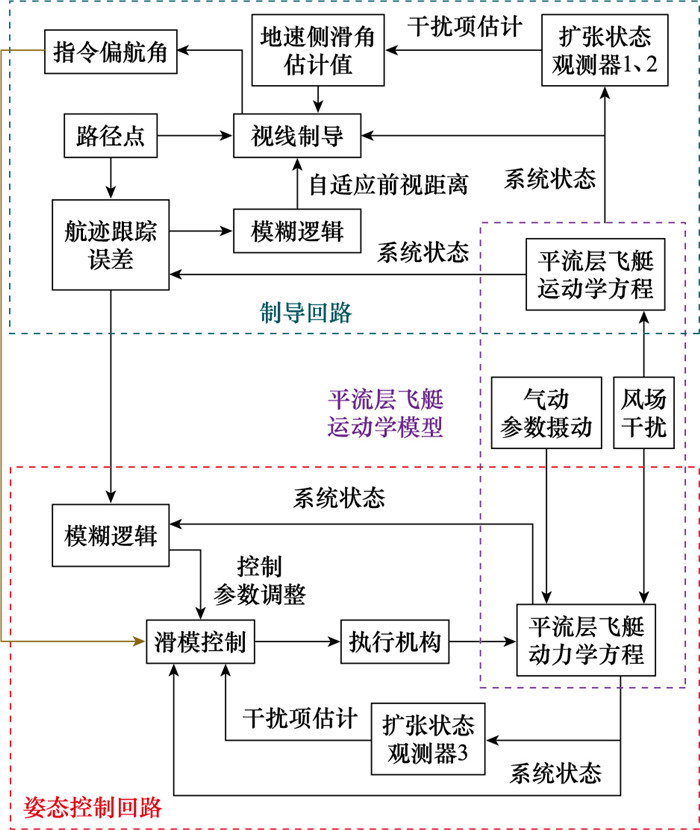
Table 1
Fuzzy rules for the parameter of kΔ"
| |ey| | kΔ |
| ZO | PS |
| PS | PM |
| PM | PB |
| PB | PB |
Table 2
Look-ahead distance parameters"
| 前视距离参数 | 集合元素 | 数值 |
| |ey| | ZO/m | 0 |
| PS/m | 500 | |
| PM/m | 1 000 | |
| PB/m | >1 000 | |
| kΔ | PS | 0.2 |
| PM | 1 | |
| PB | 2 | |
| aΔ | - | 0.000 5 |
| Δmin/m | - | 10 |
| Δmax/m | - | 800 |
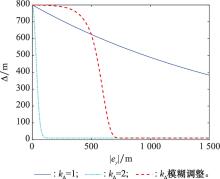
Fig.4
Look-ahead distance Δ change with different |ey|"
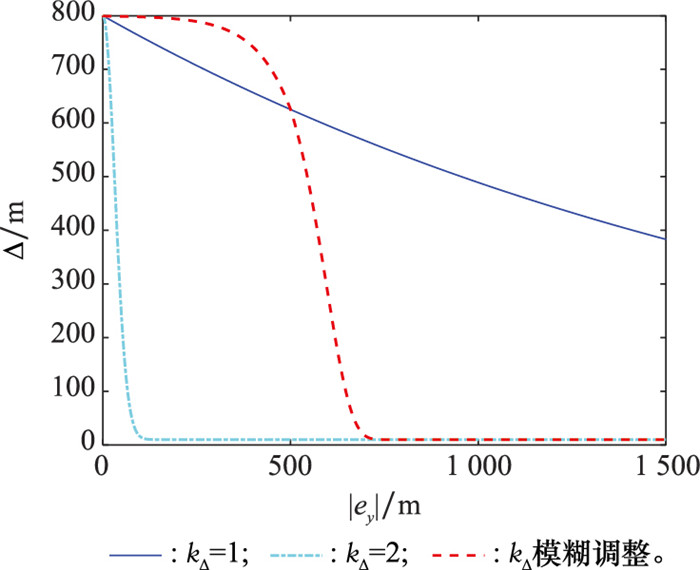
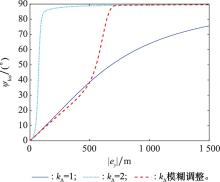
Fig.5
Look-ahead angle ψlos change with different |ey|"
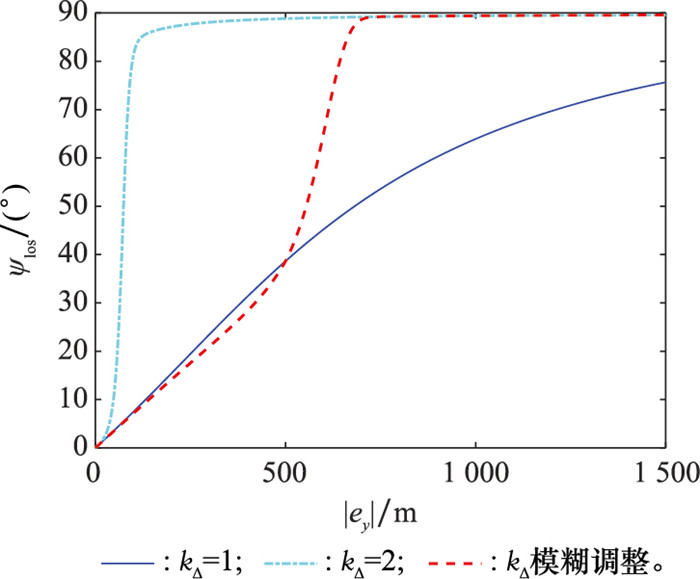
Table 3
Fuzzy rules for control parameter of kp"
| |ey| | |βa| | |||
| ZO | PS | PM | PB | |
| ZO | ZO | ZO | ZO | ZO |
| PS | PM | PS | ZO | ZO |
| PM | PB | PB | PM | PM |
| PB | PB | PB | PM | PM |
Table 4
Initial state of stratospheric airship"
| 初始状态 | 数值 | 初始状态 | 数值 | |
| ua/(m/s) | 15 | x/m | 0 | |
| va/(m/s) | 0 | y/m | 0 | |
| r/(°/s) | 0 | ψ/(°) | 50 |
Table 5
Structural parameters of stratospheric airship"
| 参数 | 数值 | 参数 | 数值 | |
| 飞行高度/km | 20 | 表观系数k11 | 0.11 | |
| 质量/kg | 7 000 | 表观系数k22 | 0.83 | |
| 转动惯量/(kg·m2) | 5.1×106 | 表观系数k66 | 0.10 | |
| 体积/m3 | 7.5×104 | - | - |
Table 6
Aerodynamic parameters of stratospheric airship"
| 气动参数 | 数值 | 气动参数 | 数值 | |
| Cnr | -0.25 | CX | 0.045 | |
| Cnβ | 1.18 | CYβ | -11.23 |
Table 7
Attitude control law parameters"
| 控制参数 | 集合元素 | 数值 |
| |βa|/(°) | ZO | 0 |
| PS | 1 | |
| PM | 3 | |
| PB | >3 | |
| kp | ZO | 0 |
| PS | 1 | |
| PM | 2 | |
| PB | 3 | |
| k0 | - | 5 |
| k1 | - | 0.5 |
| k2 | - | 0.5 |
| k3 | - | 0.5 |
| k4 | - | 0.5 |
| p | - | 7 |
| q | - | 5 |
| a1 | - | 1.5 |
| a2 | - | 0.58 |
| D | - | 0.5 |
Table 8
ESO parameters of stratospheric airship"
| ESO参数 | 数值 | ESO参数 | 数值 | |
| m1、m3 | 0.9 | m5 | 0.95 | |
| σ1、σ3 | 10 | σ5 | 1.1 | |
| σ2、σ4 | 100 | σ6 | 1.2 | |
| c1、c3 | 0.05 | c5 | 0.9 | |
| c2、c4 | 1 | c6 | 0.02 | |
| μ | 0.05 | τ | 100 |
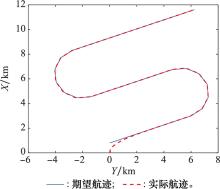
Fig.6
Curves of flight path following"
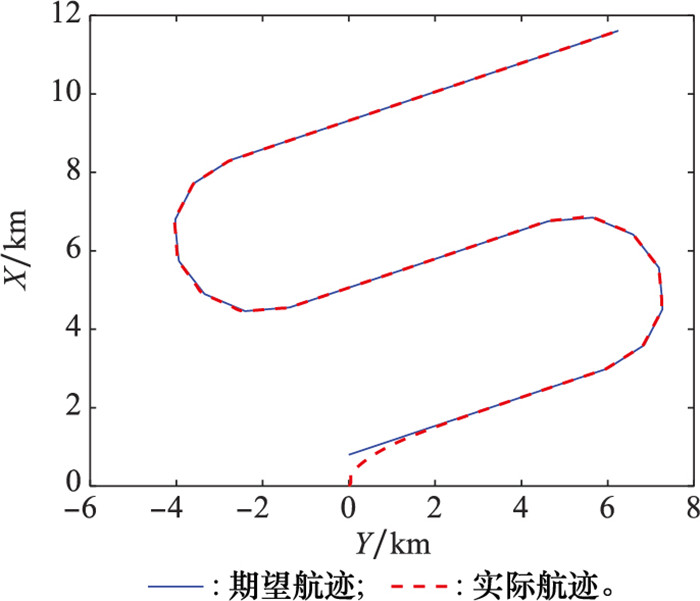
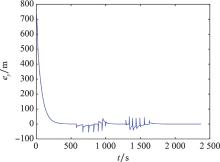
Fig.7
Curves of normal flight path following error"
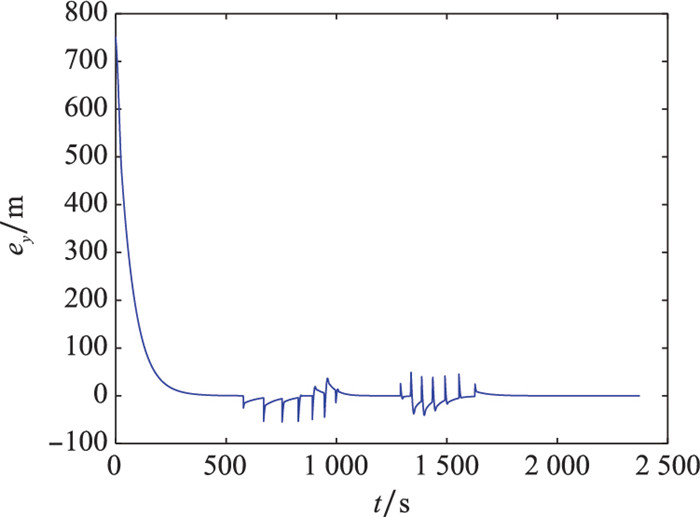
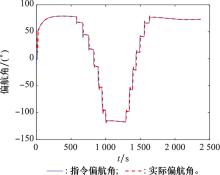
Fig.8
Curves of command yaw angle and real yaw angle"
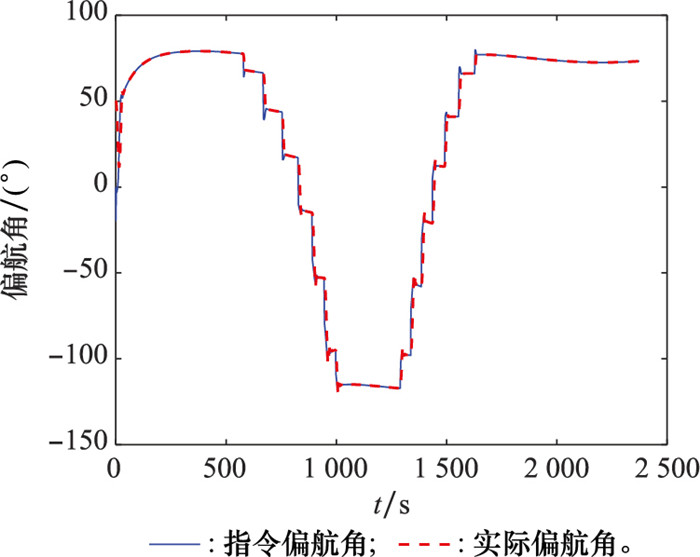
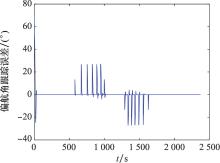
Fig.9
Curves of yaw angle following error"
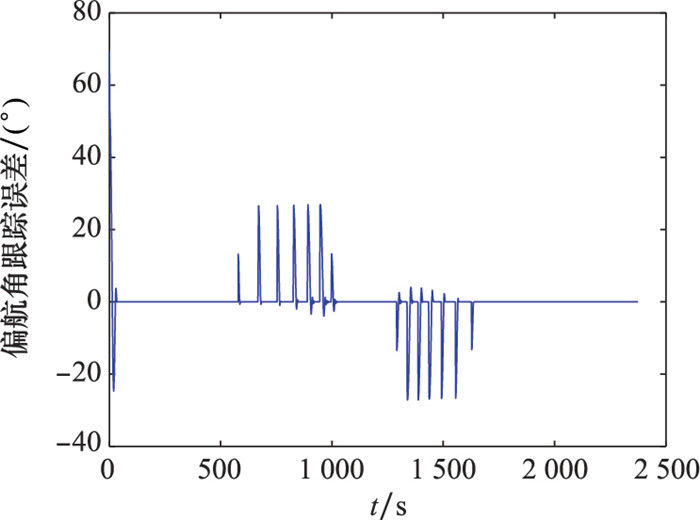
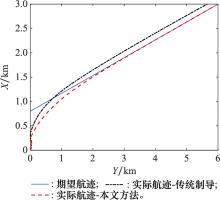
Fig.10
Curves of flight path following"
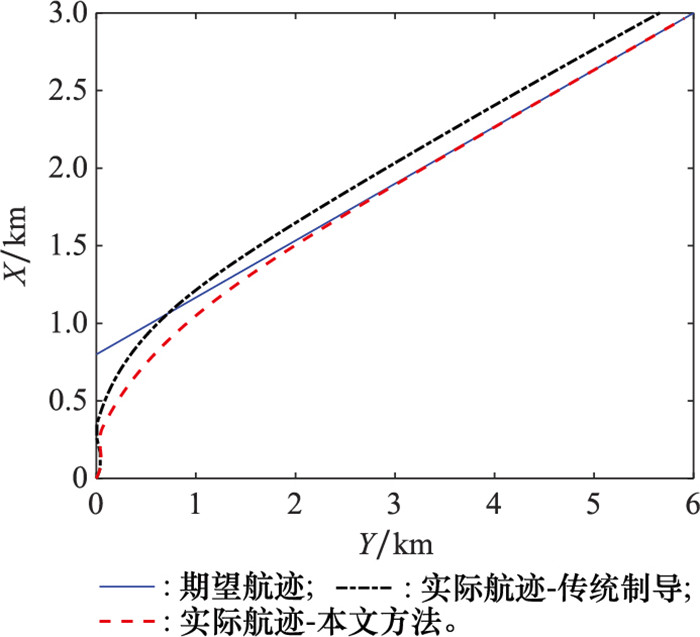
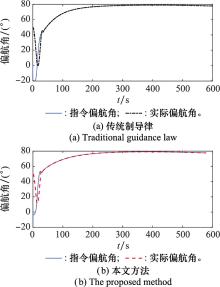
Fig.11
Curves of yaw angle"
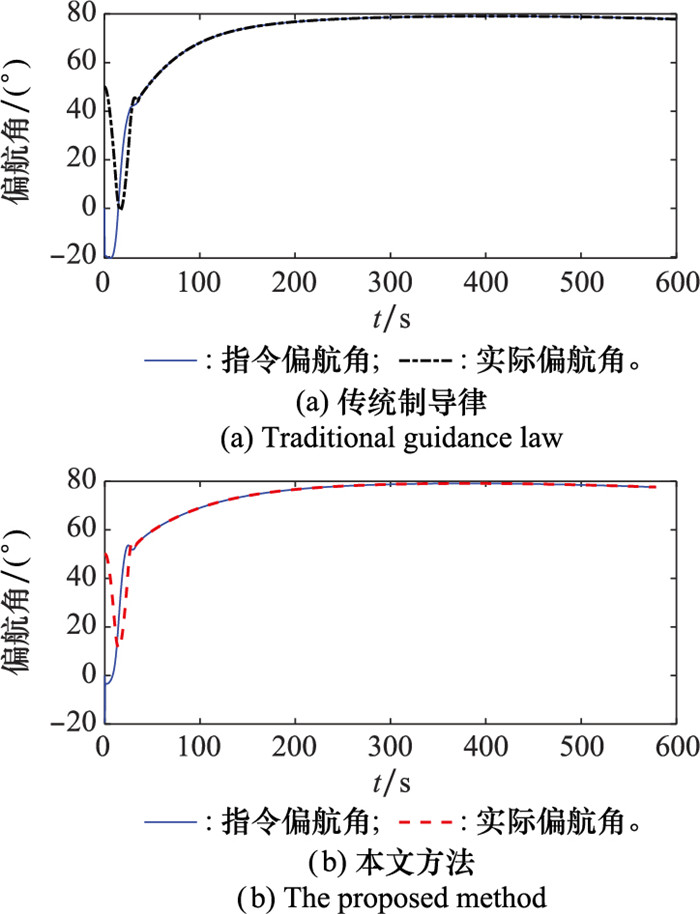
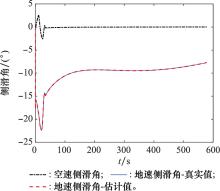
Fig.12
Curves of side slip angle"
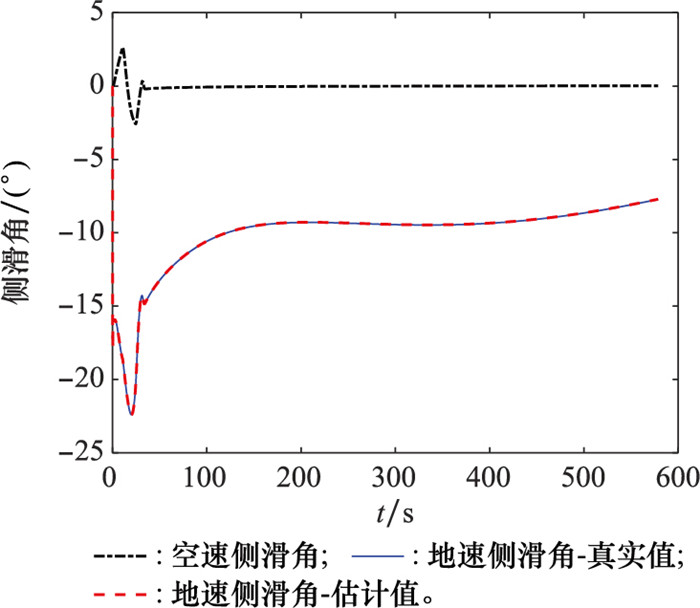
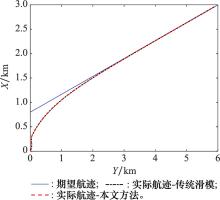
Fig.13
Curves of flight path following"
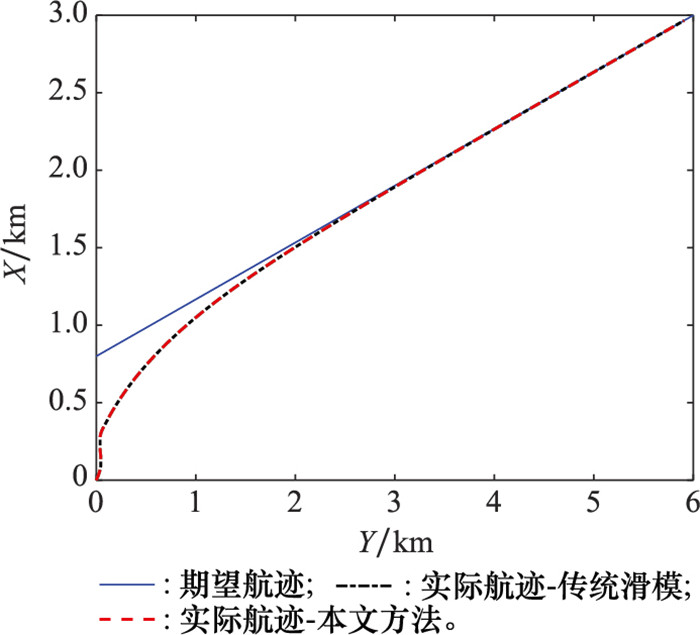
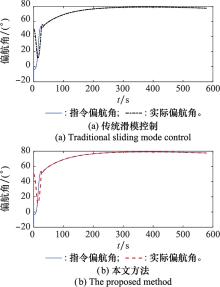
Fig.14
Curves of yaw angle"
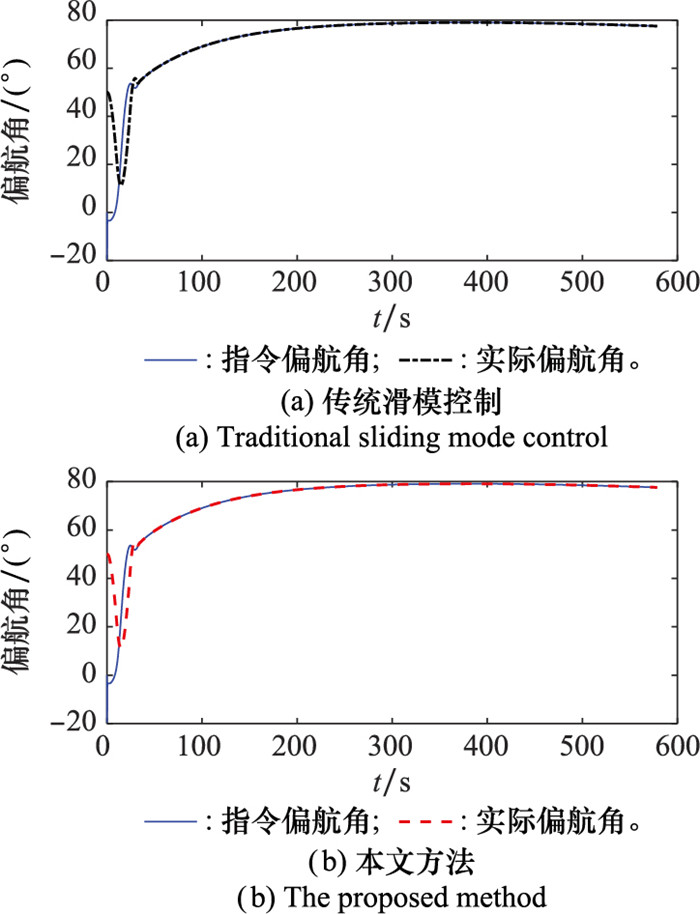

Fig.15
Curves of yaw angle acceleration"
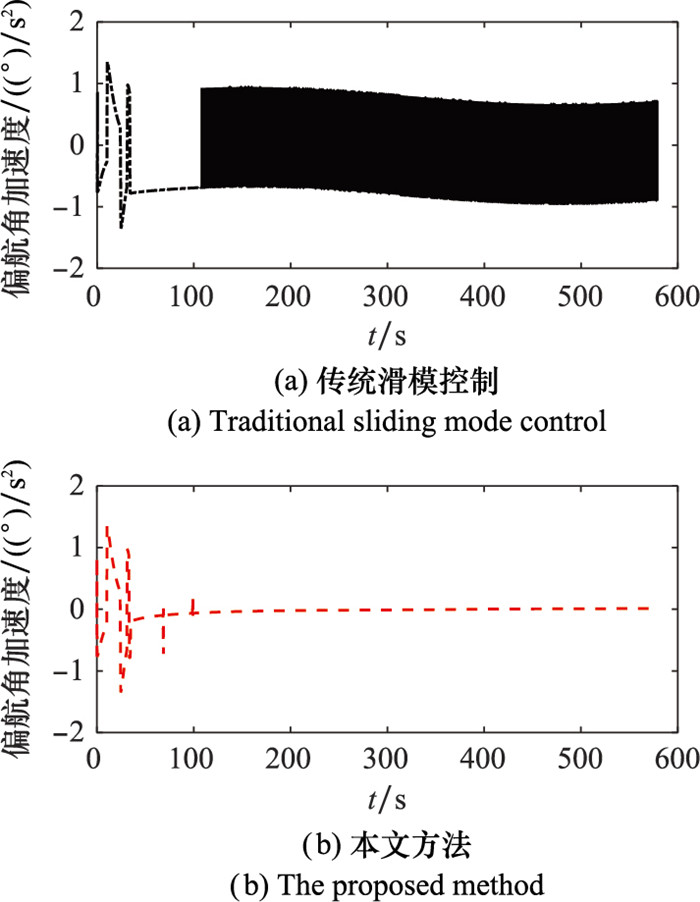
Fig.16
Curves of thrust moment"
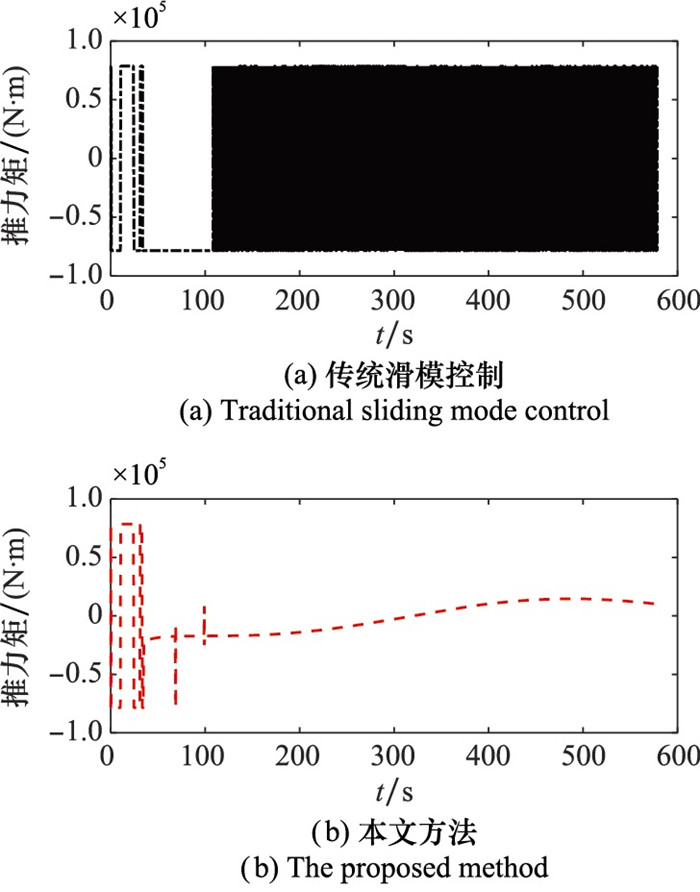
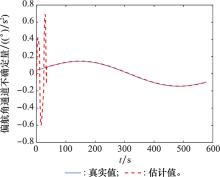
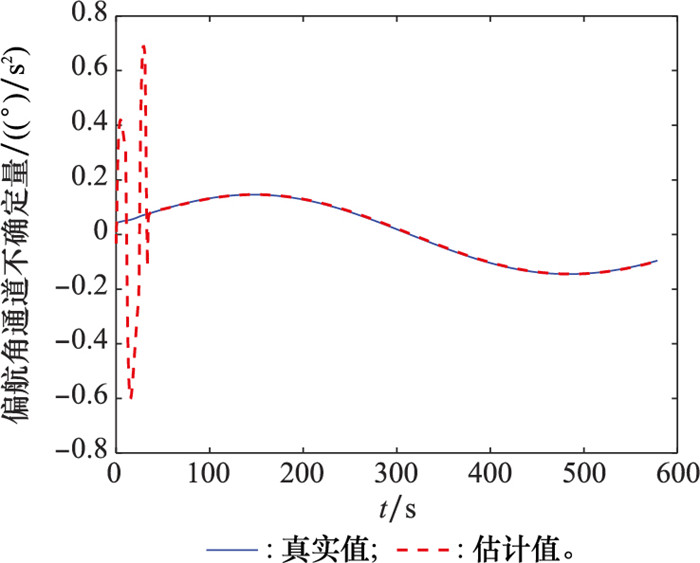
Fig.17
Curves of uncertainty of yaw angle channel"
| 2 | 杨晓伟. 风场中平流层飞艇轨迹智能控制方法[D]. 长沙: 国防科技大学, 2020. |
| YANG X W. Intelligent trajectory control methods for stratospheric airships in wind field[D]. Changsha: National University of Defense Technology, 2020. | |
| 3 | 赵达, 刘东旭, 孙康文, 等. 平流层飞艇研制现状、技术难点及发展趋势[J]. 航空学报, 2016, 37 (1): 45- 56. |
| ZHAO D , LIU D X , SUN K W , et al. Research status, technical difficulties and development trend of stratospheric airship[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37 (1): 45- 56. | |
| 4 | 杨希祥, 杨晓伟, 邓小龙. 反步法与神经网络融合的平流层飞艇轨迹鲁棒控制方法[J]. 宇航学报, 2021, 42 (3): 351- 358. |
| YANG X X , YANG X W , DENG X L . Robust trajectory control method for stratopheric airships with combintion of backstepping and neural network[J]. Acta Astronautica, 2021, 42 (3): 351- 358. | |
| 5 | 杨希祥, 张家实. 风场中平流层飞艇轨迹跟踪的滑模控制方法[J]. 国防科技大学学报, 2019, 41 (1): 1- 4. |
| YANG X X , ZHANG J S . Sliding mode control for trajectory tracking of stratospheric airships in wind field[J]. Journal of National University of Defense Technology, 2019, 41 (1): 1- 4. | |
| 6 |
CHENG L , ZUO Z Y , SONG J W , et al. Robust three-dimensional path-following control for an under-actuated stratospheric airship[J]. Advances in Space Research, 2019, 63 (1): 526- 538.
doi: 10.1016/j.asr.2018.09.008 |
| 7 |
WANG J , MENG X Y , WU G H . Path following of the autonomous airship with compensation of unknown wind and modeling uncertainties[J]. Aerospace Science and Technology, 2019, 93, 105349.
doi: 10.1016/j.ast.2019.105349 |
| 8 |
LIU S Q , SANG Y J . Underactuated stratospheric airship trajectory control using an adaptive integral backstepping approach[J]. Journal of Aircraft, 2018, 55 (6): 2357- 2371.
doi: 10.2514/1.C034923 |
| 9 |
ADAMSKI W , PAZDERSKI D , HERMAN P . Robust 3D tracking control of an underactuated autonomous airship[J]. IEEE Robo-tics and Automation Letters, 2020, 5 (3): 4281- 4288.
doi: 10.1109/LRA.2020.2994484 |
| 10 |
LOU W J , ZHU M , GUO X , et al. Command filtered sliding mode trajectory tracking control for unmanned airships based on RBFNN approximation[J]. Advances in Space Research, 2019, 63 (3): 1111- 1121.
doi: 10.1016/j.asr.2018.10.017 |
| 11 |
YANG Y N , YAN Y . Neural network approximation-based nonsingular terminal sliding mode control for trajectory tracking of robotic airships[J]. Aerospace Science and Technology, 2016, 54, 192- 197.
doi: 10.1016/j.ast.2016.04.021 |
| 12 |
SAEED A , LIU Y , SHAH M Z , et al. Higher order sliding mode based lateral guidance and control of finless airship[J]. Aerospace Science and Technology, 2021, 113, 106670.
doi: 10.1016/j.ast.2021.106670 |
| 13 |
LIU S Q , SANG Y J , WHIDBORNE J F . Adaptive sliding-mode- backstepping trajectory tracking control of underactuated airships[J]. Aerospace Science and Technology, 2020, 97, 105610.
doi: 10.1016/j.ast.2019.105610 |
| 14 |
LIU S Q , WHIDBORNE J F , HE L . Backstepping sliding-mode control of stratospheric airships using disturbance-observer[J]. Advances in Space Research, 2021, 67 (3): 1174- 1187.
doi: 10.1016/j.asr.2020.10.047 |
| 15 |
LIU Y , SAEED A , SHAH M Z , et al. Sliding mode lateral stand-off tracking control of finless airship[J]. Aerospace Science and Technology, 2021, 119, 107164.
doi: 10.1016/j.ast.2021.107164 |
| 16 |
GOU H B , ZHU M , ZHENG Z W , et al. Adaptive fault-tole-rant control for stratospheric airships with full-state constraints, input saturation, and external disturbances[J]. Advances in Space Research, 2022, 69 (1): 701- 717.
doi: 10.1016/j.asr.2021.09.015 |
| 17 |
YUAN J C , GUO X , ZHENG Z W , et al. Error-constrained fixed-time trajectory tracking control for a stratospheric airship with disturbances[J]. Aerospace Science and Technology, 2021, 118, 107055.
doi: 10.1016/j.ast.2021.107055 |
| 18 |
CHEN T , ZHU M , ZHENG Z W . Adaptive path following control of a stratospheric airship with full-state constraint and actuator saturation[J]. Aerospace Science and Technology, 2019, 95, 105457.
doi: 10.1016/j.ast.2019.105457 |
| 1 |
洪陆合, 林献武, 兰维瑶. 基于奇异摄动法的平流层飞艇水平面轨迹优化[J]. 系统工程与电子技术, 2014, 36 (4): 728- 733.
doi: 10.3969/j.issn.1001-506X.2014.04.20 |
|
HONG L H , LIN X W , LAN W Y . Trajectory optimization of stratosphere airship in horizontal based on singular perturbation metod[J]. Systems Engineering and Electronics, 2014, 36 (4): 728- 733.
doi: 10.3969/j.issn.1001-506X.2014.04.20 |
|
| 19 |
YANG X W , YANG X X , DENG X L . Horizontal trajectory control of stratospheric airships in wind field using Q-learning algorithm[J]. Aerospace Science and Technology, 2020, 106, 106100.
doi: 10.1016/j.ast.2020.106100 |
| 20 |
AZINHEIRA J R , PAIVA E C , BUENO S S . Influence of wind speed on airship dynamics[J]. Journal of Guidance, Control and Dynamics, 2002, 25 (6): 1116- 1124.
doi: 10.2514/2.4991 |
| 21 |
FOSSEN T I , PETTERSEN K Y . On uniform semiglobal exponential stability (USGES) of proportional line-of-sight gui-dance laws[J]. Automatica, 2014, 50 (11): 2912- 2917.
doi: 10.1016/j.automatica.2014.10.018 |
| 22 |
LEKKAS A M , FOSSEN T I . Integral LOS path following for curved paths based on a monotone cubic hermite spline parametrization[J]. IEEE Trans.on Control Systems Technology, 2014, 22 (6): 2287- 2301.
doi: 10.1109/TCST.2014.2306774 |
| 23 |
LIU L , WANG D , PENG Z H . ESO-based line-of-sight gui-dance law for path following of underactuated marine surface vehicles with exact sideslip compensation[J]. IEEE Journal of Oceanic Engineering, 2017, 42 (2): 477- 487.
doi: 10.1109/JOE.2016.2569218 |
| 24 |
LIU L , WANG D , PENG Z H . Coordinated path following of multiple underacutated marine surface vehicles along one curve[J]. ISA Transactions, 2016, 64, 258- 268.
doi: 10.1016/j.isatra.2016.04.013 |
| 25 |
XIONG S F , WANG W H , LIU X D , et al. A novel extended state observer[J]. ISA Transactions, 2015, 58, 309- 317.
doi: 10.1016/j.isatra.2015.07.012 |
| 26 |
FENG Y , YU X H , MAN Z H . Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38 (12): 2159- 2167.
doi: 10.1016/S0005-1098(02)00147-4 |
| 27 | 梅红, 王勇. 快速收敛的机器人滑模变结构控制[J]. 信息与控制, 2009, 38 (5): 552- 557. |
| MEI H , WANG Y . Fast convergent sliding mode variable structure control of robot[J]. Information and Control, 2009, 38 (5): 552- 557. |
| [1] | Zhengliang LU, Jiatong LI, Yuandong HU, Wenhe LIAO. Attitude dynamics and aerodynamic compensation control of low-orbit mass moment spacecraft [J]. Systems Engineering and Electronics, 2025, 47(6): 1975-1984. |
| [2] | Bo GUO, Ming TIE, Wenhui FAN, Chuanxu LI. Cooperative guidance method of high lift-to-drag ratio aircraft based on sliding mode control [J]. Systems Engineering and Electronics, 2025, 47(2): 580-590. |
| [3] | Wenwen ZHANG, Cheng ZHANG, Chenming ZHENG, Runbei CHENG, Tianle CHEN. Design of improved line-of-sight guidance law based on aircraft visual information [J]. Systems Engineering and Electronics, 2024, 46(8): 2779-2788. |
| [4] | Dengfeng YANG, Xiaodong YAN. Cooperative active defense guidance strategy for aircraft-defenders based on cooperative LOS and DMPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1724-1733. |
| [5] | Xinyun ZHAO, Jianqiao YU. Multi-source force combined control method for novel agile projectiles [J]. Systems Engineering and Electronics, 2024, 46(5): 1734-1744. |
| [6] | Qiushi ZHENG, Weichun XU, Minghan ZHAO, Naixing LI, Xuxin BAO. Research on roll control technology of trajectory correction fuse with active-canards [J]. Systems Engineering and Electronics, 2024, 46(4): 1412-1421. |
| [7] | Yang GUI, Bochao ZHENG, Peng GAO. Sliding mode attitude control of quadrotor UAV based on NESO-LFDC [J]. Systems Engineering and Electronics, 2024, 46(3): 1075-1083. |
| [8] | Yushi JIANG, Yang CHEN, Lu GAO, Ligen CAI, Jixing LYU. Predefined-time adaptive control for heavy-lift launch vehicles [J]. Systems Engineering and Electronics, 2023, 45(8): 2570-2577. |
| [9] | Fangjun LI, Shengjie WANG, Junfeng LI, Hao LI, Chenjun CUI. Robust control of servo system with backlash based on new reaching law [J]. Systems Engineering and Electronics, 2023, 45(4): 1177-1184. |
| [10] | Haoran LU, Wei ZHENG, Xiaohua CHANG. Fractional order sliding mode guidance law based on robust exact differentiator [J]. Systems Engineering and Electronics, 2023, 45(1): 175-183. |
| [11] | Shibin LUO, Xiaodong LI, Zhongsen WANG, Cheng XU. Generalized super-twisting finite-time control for the ascent phase of parallel carrier [J]. Systems Engineering and Electronics, 2022, 44(5): 1626-1635. |
| [12] | Junbao WEI, Haiyan LI, Jing LI. Novel backstepping control for hypersonic vehicle with angle of attack constraint [J]. Systems Engineering and Electronics, 2022, 44(4): 1310-1317. |
| [13] | Xiao TANG, Jikun YE, Xu LI. Design of 3D nonlinear prescribed performance guidance law [J]. Systems Engineering and Electronics, 2022, 44(2): 619-627. |
| [14] | Wenqi YANG, Jianhua LU, Xu JIANG, Yuanxin WANG. Design of quadrotor attitude active disturbance rejection controller based on improved ESO [J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799. |
| [15] | Haixiang XU, Cong HU, Wenzhao YU, Guoquan YAO. Variable depth control of buoyancy regulated UUV with input constraints [J]. Systems Engineering and Electronics, 2022, 44(11): 3496-3504. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||