Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (5): 1626-1635.doi: 10.12305/j.issn.1001-506X.2022.05.24
• Guidance, Navigation and Control • Previous Articles Next Articles
Generalized super-twisting finite-time control for the ascent phase of parallel carrier
Shibin LUO1, Xiaodong LI1, Zhongsen WANG1, Cheng XU2,*
- 1. School of Aeronautics and Astronautics, Central South University, Changsha 410083 China
2. Key Laboratory of Complex System Control and Intelligent Collaboration Technology, Beijing 100074, China
-
Received:2021-07-15Online:2022-05-01Published:2022-05-16 -
Contact:Cheng XU
CLC Number:
Cite this article
Shibin LUO, Xiaodong LI, Zhongsen WANG, Cheng XU. Generalized super-twisting finite-time control for the ascent phase of parallel carrier[J]. Systems Engineering and Electronics, 2022, 44(5): 1626-1635.
share this article
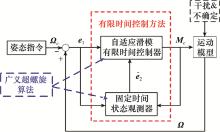
Fig.1
Structure of control system"

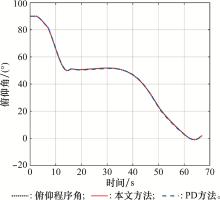
Fig.2
Pitch angle tracking"

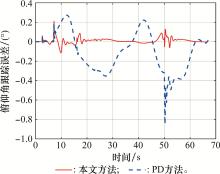
Fig.3
Pitch angle tracking error"
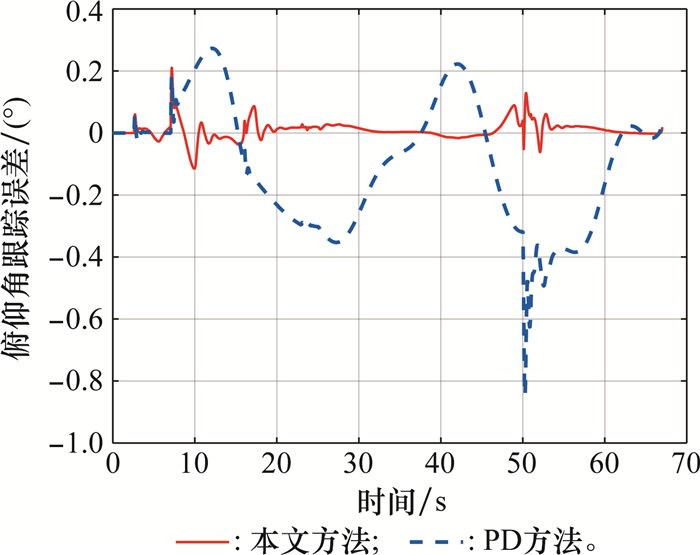
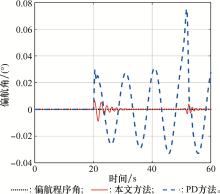
Fig.4
Yaw angle tracking"

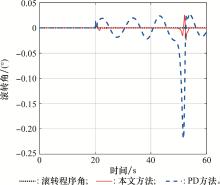
Fig.5
Roll angle tracking"

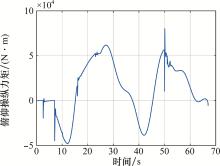
Fig.6
Pitch control moment"

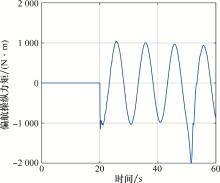
Fig.7
Yaw control moment"

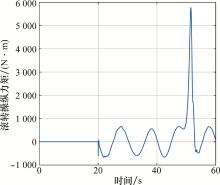
Fig.8
Roll control moment"

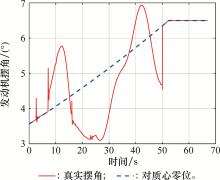
Fig.9
Engine swing angle"

Fig.10
Pitch rudder angle"

Fig.11
Yaw rudder angle"

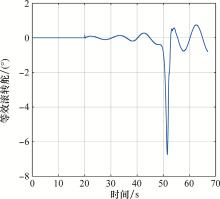
Fig.12
Roll rudder angle"
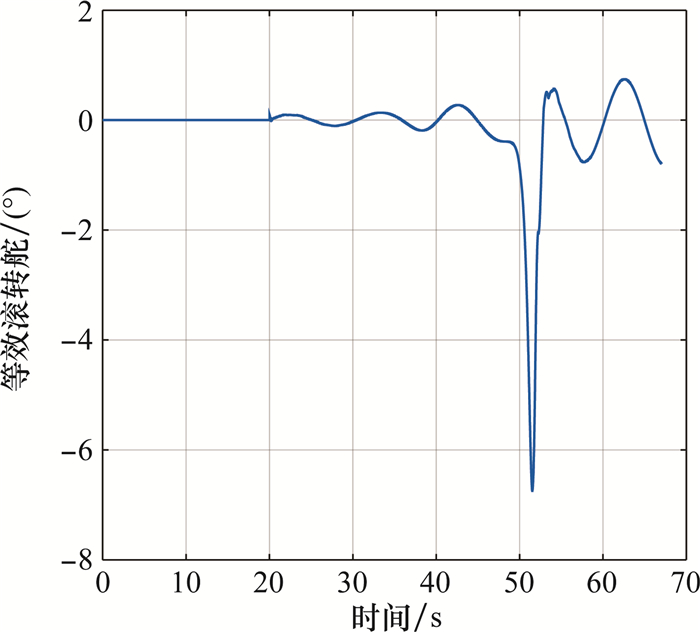
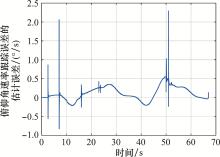
Fig.13
Estimation error of pitch rate tracking error"

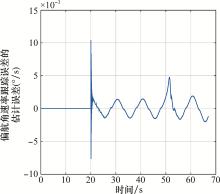
Fig.14
Estimation error of yaw rate tracking error"

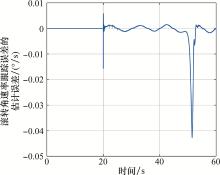
Fig.15
Estimation error of roll rate tracking error"

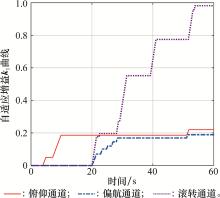
Fig.16
Adaptive gains k1"


Fig.17
Adaptive gains k2"

| 1 |
BRIESE L E , ACQUATELLA P , SCHNEPPER K . Multidisciplinary modeling and simulation framework for launch vehicle system dynamics and control[J]. Acta Astronautica, 2020, 170, 652- 664.
doi: 10.1016/j.actaastro.2019.08.022 |
| 2 | 尹永鑫, 杨明, 王子才. 并联式运载器的垂直发射建模与控制[J]. 北京航空航天大学学报, 2008, 34 (4): 369- 372, 376. |
| YI Y X , YANG M , WANG Z C . Vertical launch modeling and control of parallel carrier[J]. Journal of Beijing University of Aeronautics and Astronautics, 2008, 34 (4): 369- 372, 376. | |
| 3 |
SHTESSEL Y , HALL C , JACKSON M . Reusable launch vehicle control in multiple time scale sliding modes[J]. Journal of Guidance, Control, and Dynamics, 2000, 23 (6): 1013- 1020.
doi: 10.2514/2.4669 |
| 4 |
GAO Z F , JIANG B , SHI P , et al. Active fault tolerant control design for reusable launch vehicle using adaptive sliding mode technique[J]. Journal of the Franklin Institute, 2012, 349 (4): 1543- 1560.
doi: 10.1016/j.jfranklin.2011.11.003 |
| 5 | MAO Q , DOU L Q , YANG Z S , et al. Fuzzy disturbance observer-based adaptive sliding mode control for reusable launch vehicles with aeroservoelastic characteristic[J]. IEEE Trans.on Industrial Informatics, 2019, 16 (2): 1214- 1223. |
| 6 | SARKAR R, MUKHERJEE J, PATIL D, et al. Artificial time delay based adaptive robust fault tolerant control for RLV during re-entry phase[C]//Proc. of the IEEE 28th Mediterranean Conference on Control and Automation, 2020: 56-61. |
| 7 |
NGUYEN N P , MUNG N X , THANH H L N N , et al. Adaptive sliding mode control for attitude and altitude system of a quadcopter UAV via neural network[J]. IEEE Access, 2021, 9, 40076- 40085.
doi: 10.1109/ACCESS.2021.3064883 |
| 8 |
SONG X J , YUE B Z , WU W J . Investigation on attitude disturbance control and vibration suppression for fuel-filled flexible spacecraft[J]. Acta Mechanica Sinica, 2015, 31 (4): 581- 588.
doi: 10.1007/s10409-015-0431-8 |
| 9 | WANG Z, WANG Q, ZHANG X J. An adaptive fuzzy sliding-mode technique for attitude control of launch vehicle[C]//Proc. of the IEEE International Conference on Mechatronics and Automation, 2007: 1587-1592. |
| 10 | ARUN K V V , LAILA B M . Adaptive backstepping sliding mode control for roll channel of launch vehicle[J]. International Journal of Aeronautical Science and Aerospace Research, 2015, 2 (5): 58- 64. |
| 11 | TURNER B J, WILLIAMS J R, SHTESSEL Y B. Integral sliding mode autopilot for rocket stabilization with unmatched disturbances[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2012: 1-14. |
| 12 |
HU C F , GAO Z F , REN Y L , et al. A robust adaptive nonlinear fault-tolerant controller via norm estimation for reusable launch vehicles[J]. Acta Astronautica, 2016, 128, 685- 695.
doi: 10.1016/j.actaastro.2016.08.020 |
| 13 |
WANG Z , WU Z , DU Y J . Robust adaptive backstepping control for reentry reusable launch vehicles[J]. Acta Astronautica, 2016, 126, 258- 264.
doi: 10.1016/j.actaastro.2016.04.015 |
| 14 |
TIAN B L , LU H C , ZUO Z Y , et al. Multivariable uniform finite-time output feedback reentry attitude control for RLV with mismatched disturbance[J]. Journal of the Franklin Institute, 2018, 355 (8): 3470- 3487.
doi: 10.1016/j.jfranklin.2018.01.042 |
| 15 | LI K, ZONG Q, ZHANG R L, et al. Real-time simulation platform verification for RLV attitude control[C]//Proc. of the IEEE 39th Chinese Control Conference, 2020: 6768-6773. |
| 16 |
SHENG Y Z , GENG J , LIU X D , et al. Nonsingular finite-time second order sliding mode attitude control for reentry vehicle[J]. International Journal of Control, Automation and Systems, 2015, 13 (4): 853- 866.
doi: 10.1007/s12555-013-0181-y |
| 17 |
MU R J , CHEN J Y , PENG K K , et al. Finite-time super-twisting controller based on SESO design for RLV re-entry phase[J]. IEEE Access, 2019, 7, 37371- 37380.
doi: 10.1109/ACCESS.2019.2905371 |
| 18 |
BHAT S P , BERNSTEIN D S . Continuous finite-time stabilization of the translational and rotational double integrators[J]. IEEE Trans.on Automatic Control, 1998, 43 (5): 678- 682.
doi: 10.1109/9.668834 |
| 19 | 崔乃刚, 吴荣, 韦常柱, 等. 火箭垂直返回双幂次固定时间收敛滑模控制方法[J]. 哈尔滨工业大学学报, 2020, 52 (4): 15- 24. |
| CUI N G , WU R , WEI C Z , et al. Rocket vertical return double-power fixed-time convergence sliding mode control method[J]. Journal of Harbin Institute of Technology, 2020, 52 (4): 15- 24. | |
| 20 |
ZHANG L , WEI C Z , WU R , et al. Fixed-time extended state observer based non-singular fast terminal sliding mode control for a VTVL reusable launch vehicle[J]. Aerospace Science and Technology, 2018, 82-83, 70- 79.
doi: 10.1016/j.ast.2018.08.028 |
| 21 | 梁小辉, 胡昌华, 周志杰, 等. 基于自适应动态规划的运载火箭智能姿态容错控制[J]. 航空学报, 2021, 42 (4): 511- 524. |
| LIANG X H , HU C H , ZHOU Z J , et al. Intelligent attitude fault tolerant control of launch vehicle based on adaptive dynamic programming[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (4): 511- 524. | |
| 22 |
LIANG X H , WANG Q , HU C H , et al. Fixed-time observer based fault tolerant attitude control for reusable launch vehicle with actuator faults[J]. Aerospace Science and Technology, 2020, 107, 106314.
doi: 10.1016/j.ast.2020.106314 |
| 23 |
ZHANG L , WEI C Z , WU R , et al. Adaptive fault-tolerant control for a VTVL reusable launch vehicle[J]. Acta Astronautica, 2019, 159, 362- 370.
doi: 10.1016/j.actaastro.2019.03.078 |
| 24 |
LEVANT A . High order sliding modes, differentiation and output feedback control[J]. International Journal of Control, 2003, 76 (9): 924- 941.
doi: 10.1080/0020717031000099029 |
| 25 |
DERAFA L , BENALLEGUE A , FRIDMAN L . Super twisting control algorithm for the attitude tracking of a four rotors UAV[J]. Journal of the Franklin Institute, 2012, 349 (2): 685- 699.
doi: 10.1016/j.jfranklin.2011.10.011 |
| 26 |
LI Z Y , WU S Y , TIAN B L , et al. Event-triggered-based adaptive super-twisting attitude tracking for RLV in reentry phase[J]. Journal of the Franklin Institute, 2020, 357 (18): 13430- 13448.
doi: 10.1016/j.jfranklin.2020.09.041 |
| 27 | ZHANG Y , TANG S J , GUO J . Adaptive-gain fast super-twisting sliding mode fault tolerant control for a reusable launch vehicle in reentry phase[J]. ISA Transactions, 2017, 71 (2): 380- 390. |
| 28 |
DONG Q , ZONG Q , TIAN B , et al. Adaptive-gain multivariable super-twisting sliding mode control for reentry RLV with torque perturbation[J]. International Journal of Robust and Nonlinear Control, 2017, 27 (4): 620- 638.
doi: 10.1002/rnc.3589 |
| 29 |
CHEN A J , SUN M J , WANG Z H , et al. Attitude trajectory tracking of quadrotor UAV using super-twisting observer-based adaptive controller[J]. Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, 2021, 235 (10): 1146- 1157.
doi: 10.1177/0954410020966476 |
| 30 | 李晓栋, 廖宇新, 廖俊, 等. 可重复使用运载火箭一子级垂直回收有限时间滑模控制[J]. 中南大学学报(自然科学版), 2020, 51 (4): 979- 988. |
| LI X D , LIAO Y X , LIAO J , et al. Limited time sliding mode control for one-stage vertical recovery of reusable launch vehicle[J]. Journal of Central South University (Natural Science Edition), 2020, 51 (4): 979- 988. | |
| 31 |
TRAN X T , OH H . A modified generic second order algorithm with fixed-time stability[J]. ISA Transactions, 2020, 109 (9): 72- 80.
doi: 10.1016/j.isatra.2020.10.021 |
| 32 | 刘洋, 井元伟, 刘晓平, 等. 非线性系统有限时间控制研究综述[J]. 控制理论与应用, 2020, 37 (1): 1- 12. |
| LIU Y , JING Y W , LIU X P , et al. Summary of research on finite time control of nonlinear system[J]. Control Theory & Applications, 2020, 37 (1): 1- 12. | |
| 33 |
BHAT S P , BERNSTEIN D S . Geometric homogeneity with applications to finite-time stability[J]. Mathematics of Control Signals and Systems, 2005, 17 (2): 101- 127.
doi: 10.1007/s00498-005-0151-x |
| [1] | Yong ZHANG, Changjiu LI, Xichao SU, Rongwei CUI. Maintenance task scheduling of carrier-based aircraft fleet in hangar based on HTLBO algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2858-2868. |
| [2] | Haowei CHANG, Chunlei PANG, Zehui GUO, Liang ZAHNG, Minmin LYU, Chuang ZHANG. Spoofing signal detection method based on adaptive immunity algorithm [J]. Systems Engineering and Electronics, 2022, 44(8): 2419-2426. |
| [3] | Zhenduo WANG, Yunfei ZHU, Xiaoyan NING, Ming DIAO. Combined ICI self-cancellation scheme for FrFT-OFDM system [J]. Systems Engineering and Electronics, 2022, 44(8): 2645-2651. |
| [4] | Zukun LU, Haiyu GUO, Jie SONG, Yifan SUN, Baiyu LI. Optimal front-end gain of anti-jamming satellite navigation receiver [J]. Systems Engineering and Electronics, 2022, 44(7): 2270-2275. |
| [5] | Fengyi WANG, Zhibin XIAO, Pengpeng LI, Ke ZHANG, Shaojie NI. Receiver group delay measurement technology based on carrier phase [J]. Systems Engineering and Electronics, 2022, 44(4): 1078-1084. |
| [6] | Lanhua LI, Xiaoxia HUANG. Spectrum and energy efficiency tradeoff in MC-NOMA enhanced backscatter networks [J]. Systems Engineering and Electronics, 2022, 44(2): 651-661. |
| [7] | Yi LIU, Xiaoxiong ZHOU, Guangjun CHENG. High dynamic carrier tracking technology in frequency hopping systems [J]. Systems Engineering and Electronics, 2022, 44(2): 677-683. |
| [8] | Xianyu ZHANG, Tao LIANG, Kang AN. High-resolution multiple microwave frequency measurement based on stimulated Brillouin scattering [J]. Systems Engineering and Electronics, 2022, 44(11): 3291-3297. |
| [9] | Jianing DENG, Yu WU, Shuting XU, Jinzhan GOU. Comprehensive evaluation of carrier aircraft's dispatch and recovery based on fuzzy Bayesian-ANP [J]. Systems Engineering and Electronics, 2022, 44(11): 3423-3432. |
| [10] | Yonglei QI, Xihong CHEN, Dizhe YUAN. Joint channel estimation and equalization algorithm based on UW for SC-FDE system [J]. Systems Engineering and Electronics, 2022, 44(10): 3258-3265. |
| [11] | Jiali FAN, Shaobing TIAN, Kui HUANG, Xingdong ZHU. Multi-scale object detection algorithm for aircraft carrier surface based on Faster R-CNN [J]. Systems Engineering and Electronics, 2022, 44(1): 40-46. |
| [12] | Shuangshuang WANG, Chuntao LI, Zhen WANG, Zikang SU, Fei DAI. Design of carrier landing controller based on adaptive dynamic inversion [J]. Systems Engineering and Electronics, 2022, 44(1): 218-225. |
| [13] | Wei HAN, Kaikai CUI, Jie LIU, Xinwei WANG, Yong ZHANG. Carrier landing control technology based on self-tuning MPC [J]. Systems Engineering and Electronics, 2022, 44(1): 250-261. |
| [14] | Tianqi ZHANG, Yangliu BAI, Yanping HU, Xiaoyan ZHANG. Multi-parameters blind estimation of AltBOC signal [J]. Systems Engineering and Electronics, 2021, 43(9): 2665-2672. |
| [15] | Rui LIU, Zhiwei YANG, Qidong CHEN, Guisheng LIAO, Weimin ZHEN. Centroid localization method of GNSS jamming source based on signal propagation correction [J]. Systems Engineering and Electronics, 2021, 43(8): 2083-2089. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||