Systems Engineering and Electronics ›› 2022, Vol. 44 ›› Issue (5): 1615-1625.doi: 10.12305/j.issn.1001-506X.2022.05.23
• Systems Engineering • Previous Articles Next Articles
Cooperative region search of UAV swarm with limited communication distance
Ning WANG1,2, Zhe LI1,2,*, Xiaolong LIANG1,2, Yubing WANG3, Yueqi HOU1,2
- 1. Air Traffic Control and Navigation College, Air Force Engineering University, Xi'an 710051, China
2. Shaanxi Province Laboratory of Meta-Synthesis for Electronic & Information System, Xi'an 710051, China
3. Unit 95899 of the PLA, Beijing 100089, China
-
Received:2021-01-28Online:2022-05-01Published:2022-05-16 -
Contact:Zhe LI
CLC Number:
Cite this article
Ning WANG, Zhe LI, Xiaolong LIANG, Yubing WANG, Yueqi HOU. Cooperative region search of UAV swarm with limited communication distance[J]. Systems Engineering and Electronics, 2022, 44(5): 1615-1625.
share this article
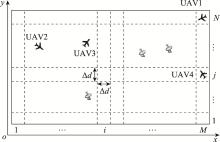
Fig.1
Task area rasterization"

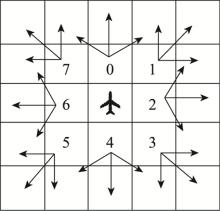
Fig.2
UAV flight decision set"
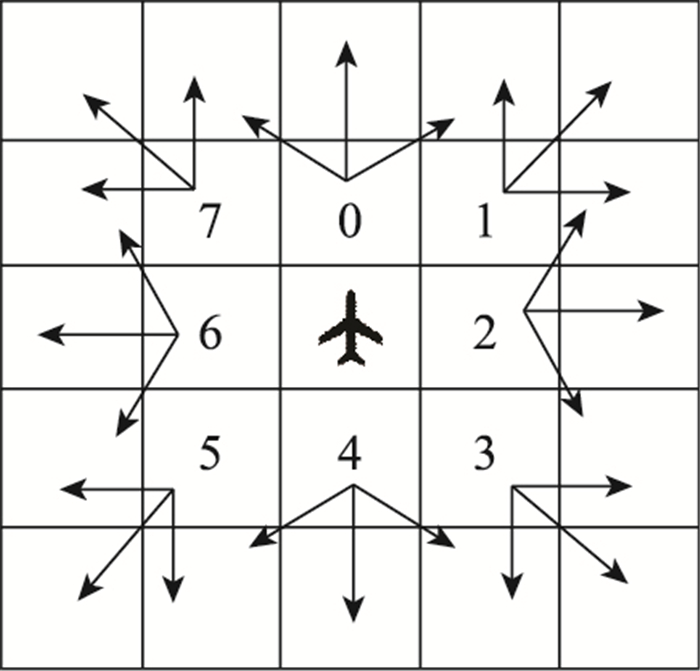
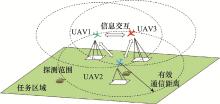
Fig.3
Information interaction under completely valid communication conditions"


Fig.4
Information interaction under partly valid communication conditions"


Fig.5
Information interaction under the condition of complete communication failure"

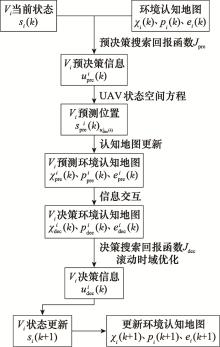
Fig.6
Process of IDMD-CSP algorithm"

Table 1
UAV initial state information and performance constraints"
| UAV序号 | 初始坐标km | 初始方向 | 固定飞行速度/(m/s) | 最大转弯角/(°) |
| 1 | (0, 0) | 0 | 20 | 45 |
| 2 | (4, 0) | 0 | 20 | 45 |
| 3 | (8, 0) | 0 | 20 | 45 |
| 4 | (12, 0) | 0 | 20 | 45 |
Table 2
Sensor performance parameters"
| 参数 | PD | PF | δp | 探测范围/km |
| 取值 | 0.9 | 0.05 | 0.8 | 1×1 |
Table 3
Environmental cognition map parameters"
| 参数 | μ | cn | vn | EA | PA | λ | dA |
| 取值 | 0.2 | 0.015 | 30 | 0.8 | 0.2 | 0.55 | 8 |
Table 4
Parameters of IDMD-CSP algorithm"
| 参数 | ω1 | ω2 | ω3 | ω4 |
| 取值 | 0.3 | 0.3 | 0.3 | 0.1 |

Fig.7
Initial distribution of target probabilities"


Fig.8
Initial distribution of environmental uncertainty maps"


Fig.9
Search planning results (t=1 200 s)"


Fig.10
Search planning results (t=3 600 s)"


Fig.11
Search planning results (t=6 000 s)"


Fig.12
Effect of communication distance on search efficiency"


Fig.13
Effect of swarm size on search efficiency"

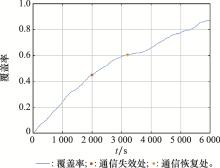
Fig.14
Coverage under communication interruption"

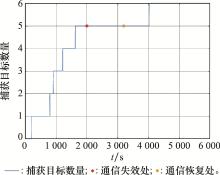
Fig.15
Number of captured targets under communication interruption"


Fig.16
Performance comparison with other methods"

| 1 | GRÉGOIRE D , MATTHIAS R , BRUST P B . Connectivity stability in autonomous multi-level UAV swarms for wide area monitoring[J]. Development and Analysis of Intelligent Vehicular Networks and Applications, 2015, 11 (6): 1- 8. |
| 2 |
YANG Y , POLYCSRPOU M , MINAI A . Multi-UAV cooperative search using an opportuneistic learning method[J]. Journal of Dynamic System, Measurement and Control, 2007, 129 (5): 716- 728.
doi: 10.1115/1.2764515 |
| 3 | 张哲璇, 龙腾, 徐广通, 等. 重访机制驱动的多无人机协同动目标搜索方法[J]. 航空学报, 2020, 41 (5): 323314. |
| ZHANG Z X , LONG T , XU G T , et al. Revisit mechanism driven multi-UAV cooperative search planning method for moving targets[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (5): 323314. | |
| 4 |
杨旭, 王锐, 张涛. 面向无人机集群路径规划的智能优化算法综述[J]. 控制理论与应用, 2020, 37 (11): 2291- 2302.
doi: 10.7641/CTA.2020.00105 |
|
YANG X , WANG R , ZHANG T . Review of unmanned aerial vehicle swarm path planning based on intelligent optimization[J]. Control Theory & Applications, 2020, 37 (11): 2291- 2302.
doi: 10.7641/CTA.2020.00105 |
|
| 5 | 轩永波, 黄长强, 吴文超, 等. 多无人机协同搜索随机目标决策[J]. 控制与决策, 2013, 28 (5): 711- 715. |
| XUAN Y B , HUANG C Q , WU W C , et al. Cooperative search strategies of multi-UAVs for random targets[J]. Control and Decision, 2013, 28 (5): 711- 715. | |
| 6 | 吴青坡, 周绍磊, 尹高扬, 等. 多无人机协同区域覆盖搜索算法的改进[J]. 电光与控制, 2016, 23 (1): 80- 84. |
| WU Q P , ZHOU S L , YIN G Y , et al. Improvement of multi-UAV cooperative coverage searching method[J]. Electronics Optics & Control, 2016, 23 (1): 80- 84. | |
| 7 |
BLASI L , DAMATO E , MATTEI M , et al. Path planning and real-time collision avoidance based on the essential visibility graph[J]. Applied Sciences, 2020, 10 (16): 5613.
doi: 10.3390/app10165613 |
| 8 | 谢朋志, 魏晨. 单侧区域分割的多无人机扫描线搜索方法研究[J]. 航空兵器, 2020, 27 (3): 67- 72. |
| XIE P Z , WEI C . Research on scanning line search method for multi-UAV based on unilateral region segmentation[J]. Aero Weaponry, 2020, 27 (3): 67- 72. | |
| 9 | 戴健, 许菲, 陈琪锋. 多无人机协同搜索区域划分与路径规划研究[J]. 航空学报, 2020, 41 (S1): 723770. |
| DAI J , XU F , CHEN Q F . Study on multi-UAV cooperative search on region division and path planning[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S1): 723770. | |
| 10 |
陈海, 何开锋, 钱炜祺. 多无人机协同覆盖路径规划[J]. 航空学报, 2016, 37 (3): 928- 935.
doi: 10.7527/S1000-6893.2015.0174 |
|
CHEN H , HE K F , QIAN W Q . Cooperative coverage path planning for multiple UAVs[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37 (3): 928- 935.
doi: 10.7527/S1000-6893.2015.0174 |
|
| 11 | 王宁, 李哲, 梁晓龙, 等. 基于搜索意图交互的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2022, 48 (3): 454- 463. |
| WANG N , LI Z , LIANG X L , et al. Cooperative search algorithm for UAV swarm based on search intention interaction[J]. Journal of Beijing University of Aeronautics and Astronautics, 2022, 48 (3): 454- 463. | |
| 12 | ERIGNAC C A. An exhaustive swarming search strategy based on distributed pheromone maps[C]//Proc. of the AIAA Infotech@Aerospace Conference and Exhibit, 2007. |
| 13 | 吴傲, 杨任农, 梁晓龙, 等. 基于信息素决策的无人机集群协同搜索算法[J]. 北京航空航天大学学报, 2021, 47 (4): 814- 827. |
| WU A , YANG R N , LIANG X L , et al. Cooperative search algorithm based on pheromone decision for UAV swarm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47 (4): 814- 827. | |
| 14 |
AGGARWAL S , KUMAR N . Path planning techniques for unmanned aerial vehicles: a review, solutions, and challenges[J]. Computer Communications, 2020, 149 (10): 270- 299.
doi: 10.1016/j.comcom.2019.10.014 |
| 15 | TRODDENP, RICHARDS A G. Multi-vehicle cooperative search using distributed model predictive control[C]//Proc. of the AIAA Guidance, Navigation and Control Conference and Exhibit, 2008. |
| 16 | 祁晓明, 魏瑞轩, 沈东, 等. 基于运动目标预测的多无人机分布式协同搜索[J]. 系统工程与电子技术, 2014, 36 (12): 2417- 2425. |
| QI X M , WEI R X , SHEN D , et al. Distributed cooperative search methods of multi-UAV based prediction of moving targets[J]. Systems Engineering and Electronics, 2014, 36 (12): 2417- 2452. | |
| 17 | 侯岳奇, 梁晓龙, 何吕龙, 等. 未知环境下无人机集群协同区域搜索算法[J]. 北京航空航天大学学报, 2019, 45 (2): 347- 356. |
| HOU Y Q , LIANG X L , HE L L , et al. Cooperative area search algorithm for UAV swarm in unknown environment[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45 (2): 347- 356. | |
| 18 | 沈东, 魏瑞轩, 祁晓明, 等. 基于MTPM和DPM的多无人机协同广域目标搜索滚动时域决策[J]. 自动化学报, 2014, 40 (7): 1391- 1403. |
| SHEN D , WEI R X , QI X M , et al. Receding horizon decision method based on MTPM and DPM for multi-UAVs cooperative large area target search[J]. Acta Automatica Sinica, 2014, 40 (7): 1391- 1403. | |
| 19 |
ZHEN Z Y , ZHU P , XUE Y X , et al. Distributed intelligent self organized mission planning of multi-UAV for dynamic targets cooperative search-attack[J]. Chinese Journal of Aeronautics, 2019, 32 (12): 2706- 2716.
doi: 10.1016/j.cja.2019.05.012 |
| 20 | 王瑞, 肖冰松. 基于改进鸽群优化和马尔可夫链的多无人机协同搜索方法[J]. 工程科学学报, 2019, 41 (10): 1342- 1350. |
| WANG R , XIAO B S . Cooperative search for multi-UAVs via an improved pigeon-inspired optimization and Markov chain approach[J]. Chinese Journal of Engineering, 2019, 41 (10): 1342- 1350. | |
| 21 |
ZHEN Z Y , CHEN Y , WEN L D , et al. An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100, 105826.
doi: 10.1016/j.ast.2020.105826 |
| 22 | DOEBBLER J, GESTING P, VALASEK J. Real-time path planning and terrain obstacle avoidance for general aviation aircraft[C]//Proc. of the AIAA Guidance, Navigation, & Control Conference & Exhibit, 2006. |
| 23 |
TIRUMALAI A P , SCHUNCK B G , JAIN R C . Evidential reasoning for building environment maps[J]. IEEE Trans.on Systems Man Cybernetics, 2002, 25 (1): 10- 20.
doi: 10.1109/21.362968 |
| 24 |
轩永波, 黄长强, 吴文超, 等. 运动目标的多无人机编队覆盖搜索决策[J]. 系统工程与电子技术, 2013, 35 (3): 539- 544.
doi: 10.3969/j.issn.1001-506X.2013.03.15 |
|
XUAN Y B , HUANG C Q , WU W C , et al. Coverage search strategies for moving targets using multiple unmanned aerial vehicle teams[J]. Systems Engineering and Electronics, 2013, 35 (3): 539- 544.
doi: 10.3969/j.issn.1001-506X.2013.03.15 |
|
| 25 |
NI J J , TANG G Y , MO Z P , et al. An improved potential game theory based method for multi-UAV cooperative search[J]. IEEE Access, 2020, 8, 47787- 47795.
doi: 10.1109/ACCESS.2020.2978853 |
| 26 |
WANG X , YADAV V , BALAKRISHNAN S N . Cooperative UAV formation flying with obstacle/collision avoidance[J]. IEEE Trans.on Control Systems Technology, 2007, 15 (4): 672- 679.
doi: 10.1109/TCST.2007.899191 |
| 27 | GEOFFREY W . Scale: the universal laws of growth, innovation, sustainability, and the pace of life in organisms, cities, economies and companies[M]. London: Penguin Press, 2017: 100- 113. |
| [1] | XIONG Zheng-xiang, KANG Feng-ju, SUN Yong-kan, ZHAO Guo-gang. Design and implementation of information interaction in warship operation system simulation [J]. Journal of Systems Engineering and Electronics, 2009, 31(5): 1142-1146. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||