Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (6): 2099-2106.doi: 10.12305/j.issn.1001-506X.2024.06.28
• Guidance, Navigation and Control • Previous Articles
Independent error compensation method of attitude and heading system based on motion constraints
Bo YANG1,*, Feng LIU1, Liang XUE1, Yunfeng LIU2
- 1. School of Missile Engineering, Rocket Force University of Engineering, Xi'an 710025, China
2. The 4th Military Representative Office of Rocket Force Equipment Department in Chengdu Area, Chengdu 610052, China
-
Received:2023-04-12Online:2024-05-25Published:2024-06-04 -
Contact:Bo YANG
CLC Number:
Cite this article
Bo YANG, Feng LIU, Liang XUE, Yunfeng LIU. Independent error compensation method of attitude and heading system based on motion constraints[J]. Systems Engineering and Electronics, 2024, 46(6): 2099-2106.
share this article

Fig.1
Theory of independent error compensation for vehicle attitude and heading system"
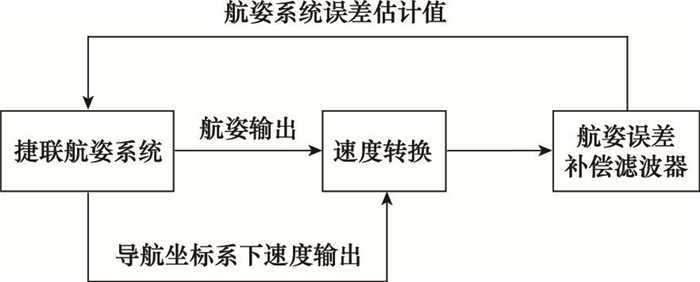

Fig.2
Vehicle motion trajectory 1"
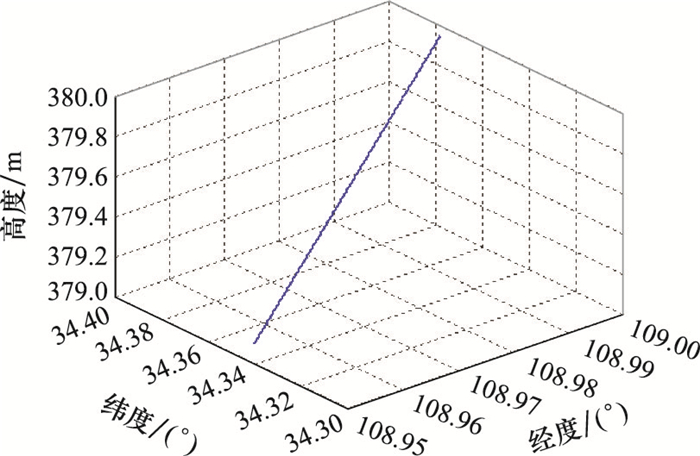
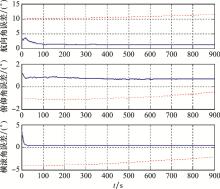
Fig.3
Heading and attitude error curves based on motion trajectory 1"
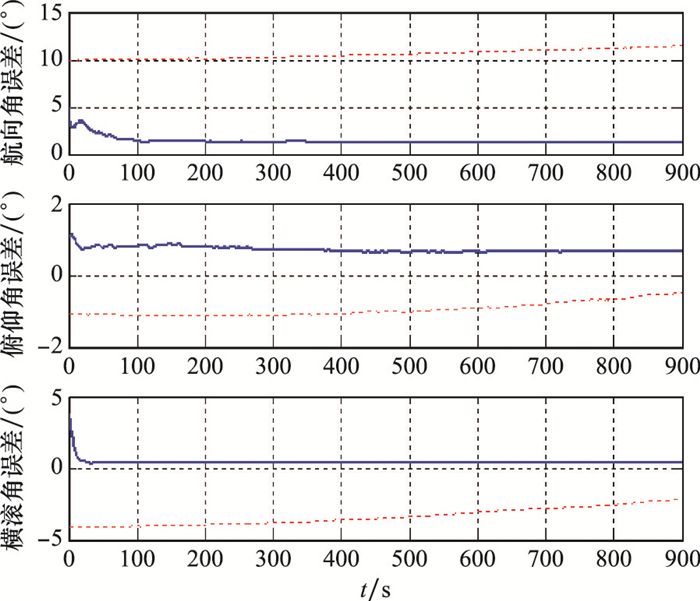

Fig.4
Vehicle motion trajectory 2"
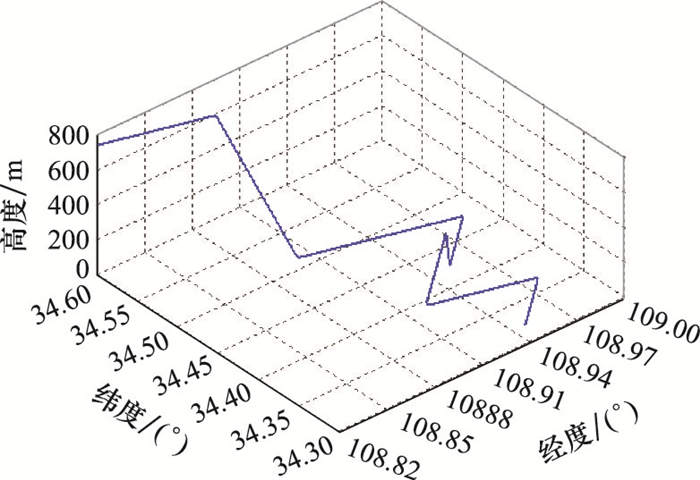

Fig.5
Heading and attitude error curves based on motion trajectory 2"
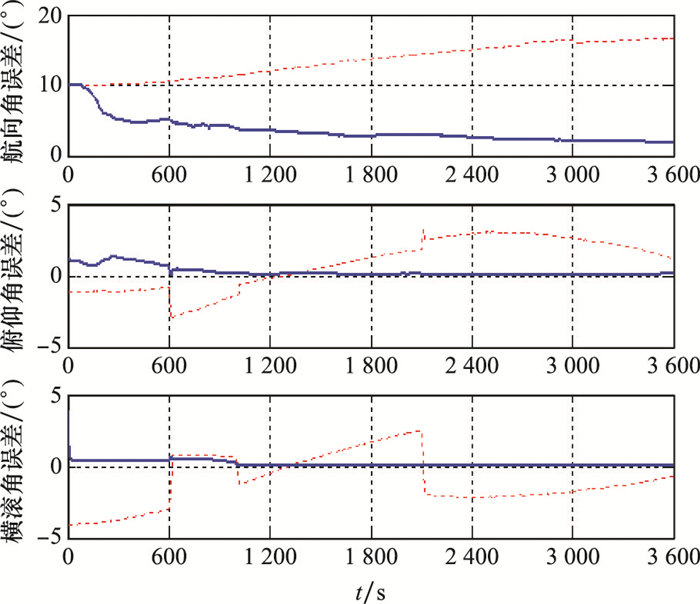

Fig.6
Laser strapdown inertial navigation system for heading and attitude error compensation experiment"
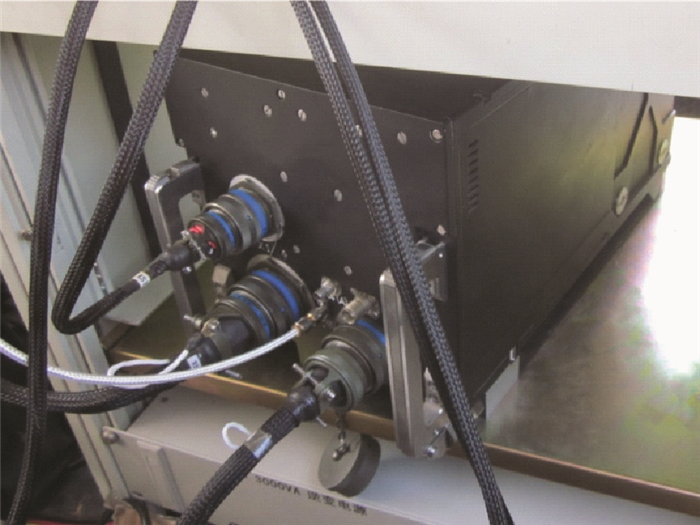

Fig.7
Experimental vehicle"

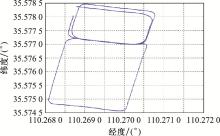
Fig.8
Vehicle driving trajectory"
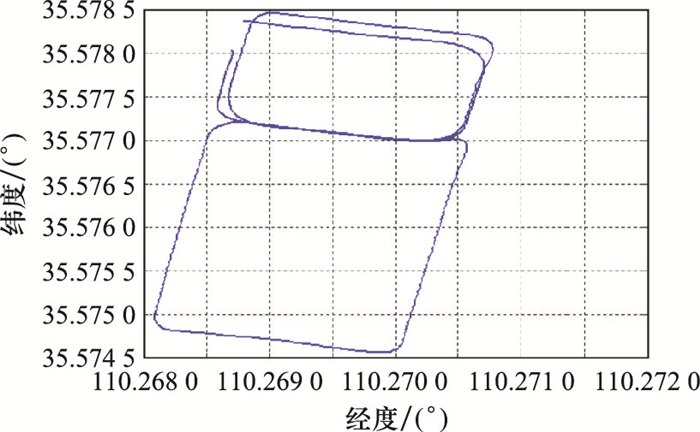
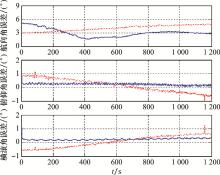
Fig.9
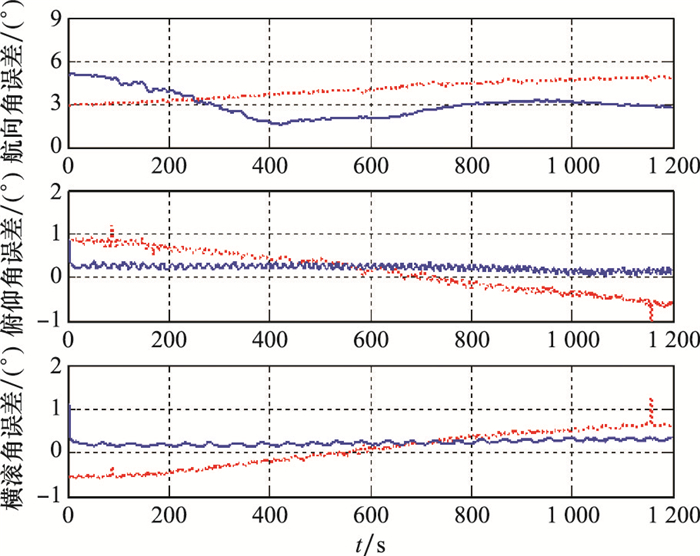
Heading and attitude error curves under vehicle test conditions"
| 13 | 陈思,仲启媛,谭立龙,等.基于RFID的车载定位定向技术研究与应用[J].火炮发射与控制学报,2019,40(1):13-18. |
| CHENS,ZHONGQ Y,TANL L,et al.Research and application of vehicle position and azimuth determining technology based on RFID[J].Journal of Gun Launch & Control,2019,40(1):13-18. | |
| 14 |
WANGM,WANGL,HANH.Research on improving heading and attitudes accuracy by online calibration of errors based on multi-RINSs joint rotation modulation[J].IEEE Sensors Journal,2022,22(5):4503-4513.
doi: 10.1109/JSEN.2022.3141462 |
| 15 | LI Y Y, ZHU T, LI R Y. Analysis of attitude and heading computer system in magnetic disturbance state[C]//Proc. of the 4th International Conference on Artificial Intelligence and Advanced Manufacturing, 2022: 202-207. |
| 16 | 王平,张广鹏,杨波,等.基于零速的航姿误差补偿方法研究[J].仪器仪表学报,2018,39(11):125-132. |
| WANGP,ZHANGG P,YANGB,et al.Research on error compensation method of attitude and heading based on zero velocity[J].Chinese Journal of Scientific Instrument,2018,39(11):125-132. | |
| 17 |
FARHANGIANF,LANDRYR.Accuracy improvement of attitude determination systems using EKF-based error prediction filter and PI controller[J].Sensors,2020,20(14):4055.
doi: 10.3390/s20144055 |
| 18 |
VERTZBERGERE,KLEINI.Attitude adaptive estimation with smartphone classification for pedestrian navigation[J].IEEE Sensors Journal,2021,21(7):9341-9348.
doi: 10.1109/JSEN.2021.3053843 |
| 19 | VERTZBERGER E, KLEIN I. Attitude and heading adaptive estimation using a data driven approach[C]//Proc. of the International Conference on Indoor Positioning and Indoor Navigation, 2021. |
| 20 |
FARAHANS B,MACHADOJ J M,GOMESF A D,et al.9-DOF IMU-based attitude and heading estimation using an extended Kalman filter with bias consideration[J].Sensors,2022,22(9):3416.
doi: 10.3390/s22093416 |
| 21 |
ASSEFINEWW,JINSEOKJ,SEUNGKIK,et al.Improved attitude and heading accuracy with double quaternion parameters estimation and magnetic disturbance rejection[J].Sensors,2021,21(16):5475.
doi: 10.3390/s21165475 |
| 1 | 黎蕾蕾,孙红星,李德仁,等.车载移动测量中定位定姿系统误差校正与补偿研究[J].武汉大学学报: 信息科学版,2016,41(9):1245-1252. |
| LIL L,SUNH X,LID R,et al.Calibration and compensation study on position and orientation system in mobile mapping application[J].Geomatics and Information Science of Wuhan University,2016,41(9):1245-1252. | |
| 2 | KEIGHOBADIJ,FARAJIJ,JANABI-SHARIFIF,et al.Design and experimental evaluation of block-pulse functions and Legendre polynomials observer for attitude-heading reference system[J].ISA Transactions,2021,116(10):232-244. |
| 3 | LI D H, GAO Y, XIE J X, et al. Aircraft attitude data fusion based on gradient descent algorithm[C]//Proc. of the 5th International Conference on Robotics, Control and Automation, 2021. |
| 4 | 王丽芬,杨功流,单友东,等.车载定位定向系统误差在线补偿方法[J].中国惯性技术学报,2015,23(2):145-149. |
| WANGL F,YANGG L,SHANY D,et al.On-line error compensation of vehicular position and orientation determination system[J].Journal of Chinese Inertial Technology,2015,23(2):145-149. | |
| 5 | NIKOLAY V, MIKHAIL V, DMITRY T. Heading and attitude determination system with low-cost IMU embedded inside one of multiple antennas[C]//Proc. of the IEEE/ION Position, Location and Navigation Symposium, 2018. |
| 6 | LUOL,HUANGY L,ZHANGZ,et al.A position loci-based in-motion initial alignment method for low-cost attitude and heading reference system[J].IEEE Trans.on Instrumentation and Measurement,2021,70,7500618. |
| 7 | 邓瑀, 严恭敏, 杨小康. 基于SINS/GNSS/ADS融合的MEMS航姿参考系统研究[C]//惯性技术发展动态发展方向研讨会——惯性传感器技术与应用, 2020. |
| DENG Y, YAN G M, YANG X K. Research on MEMS attitude and heading reference system based on SINS/GNSS/ADS[C]//Proc. of the Conference on the Dynamic Development Direction of Inertial Technology—Inertial Technology and Application, 2020. | |
| 8 |
SUNW,SUNP L,WUJ J.An adaptive fusion attitude and heading measurement method of MEMS/GNSS based on cova-riance matching[J].Micromachines,2022,13(10):1787.
doi: 10.3390/mi13101787 |
| 9 | TAOC H,SONGZ P,WENGZ P.MCTLS-assisted completed SINS/GPS integrated and applied to low-cost attitude and heading reference system[J].Mathematical Problems in Engineering,2021,2021,4260162. |
| 10 | 胡永江,武斌,陈鹏,等.小型尾坐式飞行器航姿测量系统设计与验证[J].系统工程与电子技术,2017,39(4):866-875. |
| HUY J,WUB,CHENP,et al.Design and validation of attitude and heading measurement system of small tail-sitter aircraft[J].Systems Engineering and Electronics,2017,39(4):866-875. | |
| 22 | YUJ Y,ZHANGX,KHANA S M.Attitude heading refe-rence algorithm based on transformed cubature Kalman filter[J].Measurement and Control,2020,53(7/8):1446-1453. |
| 23 | 王琮,陈安升,陈帅,等.MIMU/GNSS/ODO/高度计/航姿仪组合导航微系统硬件设计[J].航天控制,2020,38(5):73-79. |
| WANGC,CHENA S,CHENS,et al.Hardware design of MIMU/GNSS/ODO/altimeter/attitude instrument integrated navigation system[J].Aerospace Control,2020,38(5):73-79. | |
| 24 |
FANJ C,WANGZ C,LINM X,et al.Research on vehicle attitude and heading reference system based on multi-sensor information fusion[J].Proceedings of the Institution of Mechanical Engineers, Part D Journal of Automobile Engineering,2020,234(13):3056-3067.
doi: 10.1177/0954407020927546 |
| 25 |
YANGB,XIJ X,YANGJ,et al.An alignment method for strapdown inertial navigation systems assisted by Doppler radar on a vehicle-borne moving base[J].Sensors,2019,19(20):4577.
doi: 10.3390/s19204577 |
| 26 |
LIX,LIH X,HUANGG W,et al.Non-holonomic constraint (NHC)-assisted GNSS/SINS positioning using a vehicle motion state classification (VMSC)-based convolution neural network[J].GPS Solutions,2023,27(3):144-153.
doi: 10.1007/s10291-023-01483-9 |
| 27 | 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].4版西安:西北工业大学出版社,2021. |
| QINY Y,ZHANGH Y,WANGS H.Kalman filter and integrated navigation principle[M].4th edXi'an:Northwestern Polytechnic University Pres,2021. | |
| 28 | YANGB,WANGY G,XUEL,et al.Accurate integrated position and orientation method for vehicles based on strapdown inertial navigation system/Doppler radar[J].Measurement and Control,2018,51(9/10):431-442. |
| 11 | 李翔,石琦.融合光流与惯性传感器的扩展卡尔曼姿态滤波[J].电子测量技术,2021,44(17):88-92. |
| LIX,SHIQ.Extended Kalman attitude filter incorporating optical flow and inertial sensors[J].Electronic Measurement Technology,2021,44(17):88-92. | |
| 12 |
LIUX,YANGJ,LIW S,et al.Tightly coupled modeling and reliable fusion strategy for polarization-based attitude and heading reference system[J].IEEE Trans.on Industrial Informatics,2023,19(1):62-73.
doi: 10.1109/TII.2022.3160164 |
| [1] | Shiluo GUO, Chunyu WANG, Yang LI, Peng TIAN. Fault self-checking method of Kalman filter and its application for initial alignment of SINS [J]. Systems Engineering and Electronics, 2024, 46(2): 668-674. |
| [2] | Zhengyang LIU, Li ZHOU, Rui ZHANG. Attitude control of hypersonic vehicle with random parameter perturbations [J]. Systems Engineering and Electronics, 2024, 46(2): 703-714. |
| [3] | Xibin WANG, Hongde DAI, Wenjie QUAN, Rui WANG, Linsheng JIA. Nonzero velocity interval attitude estimation CKF algorithm based on acceleration compensation for inertial pedestrian navigation [J]. Systems Engineering and Electronics, 2023, 45(9): 2894-2901. |
| [4] | Feng ZHA, Qiushuo WEI, Hongyang HE, Bao LI. Biaxial rotation scheme based on diagonal rotation of IMU body [J]. Systems Engineering and Electronics, 2023, 45(8): 2546-2554. |
| [5] | Hongde DAI, Yufeng MA, Shaowu DAI, Baidong ZHENG, Xiaoyu ZHANG. Zero velocity update algorithm for inertial pedestrian navigation based on nonlinear prediction of heading error [J]. Systems Engineering and Electronics, 2023, 45(8): 2555-2561. |
| [6] | Lican DAI, Xin LIU, Haiying ZHANG, Xiang DAI, Chenggang WANG. Flight target track prediction based on Kalman filter algorithm unfolding [J]. Systems Engineering and Electronics, 2023, 45(6): 1814-1820. |
| [7] | Yikang HE, Wenhan ZHANG, Zhenhua WANG, Wen HE. Solar cell array rotation angle estimation method for satellite emergency recovery [J]. Systems Engineering and Electronics, 2023, 45(3): 797-805. |
| [8] | Kaidi JIN, Hongzhou CHAI, Chuhan SU, Minzhi XIANG, Ming LI. State transformation Kalman filter for DVL/SINS integral navigation system [J]. Systems Engineering and Electronics, 2023, 45(11): 3624-3631. |
| [9] | Jing MU, Dongsheng YAN, Yuanli CAI, Changyuan WANG. Masreliez-Martin method based robust fractional cubature Kalman filtering algorithm and its applications [J]. Systems Engineering and Electronics, 2023, 45(1): 234-240. |
| [10] | Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters [J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913. |
| [11] | Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon [J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310. |
| [12] | Guang ZHAI, Yanxin WANG, Yiyong SUN. Cooperative tracking filtering technology of multi-target based on low orbit satellite constellation [J]. Systems Engineering and Electronics, 2022, 44(6): 1957-1967. |
| [13] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [14] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [15] | Yajie XU, Yong XIAN, Bangjie LI, Leliang REN, Shaopeng LI, Weilin GUO. Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network [J]. Systems Engineering and Electronics, 2022, 44(4): 1301-1309. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||