Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (12): 4213-4221.doi: 10.12305/j.issn.1001-506X.2024.12.30
• Guidance, Navigation and Control • Previous Articles
3D path planning problem for fighter aircraft with multiple constraints
Ping YANG1,*, Bing XIAO1, Xin CHEN1, Luqi TANG2
- 1. Early Warning Academy, Wuhan 430000, China
2. Unit 93052 of the PLA, Changchun 130021, China
-
Received:2023-02-20Online:2024-11-25Published:2024-12-30 -
Contact:Ping YANG
CLC Number:
Cite this article
Ping YANG, Bing XIAO, Xin CHEN, Luqi TANG. 3D path planning problem for fighter aircraft with multiple constraints[J]. Systems Engineering and Electronics, 2024, 46(12): 4213-4221.
share this article

Fig.1
Terrain model"


Fig.2
Surface-to-air missile fire control radar model"


Fig.3
Threat source model and peak model"


Fig.4
Path shortest three-dimensional image"


Fig.5
Instantaneous fuel consumption curves for three mission modes"

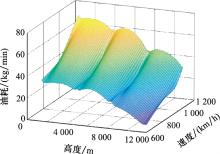
Fig.6
Effect diagram of fuel consumption interpolation matrix A"


Fig.7
Mission fuel consumption and required time scatter fit curve"


Fig.8
Ultimate curvature matrix B"


Fig.9
True track curvature and limiting curvature"

Table 1
Parameters setting"
| 仿真参数 | 初值 |
| 起点坐标 | (0, 0, 5) |
| 终点坐标 | (100, 100, 7) |
| 惯性权重ω | 1.2 |
| 加速因子c1, c2 | 2.5, 0.5 |
| 地图范围/km | 100×100×30 |
| 山峰数量/座 | 10 |
| 防空导弹/部 | 3 |
| 防御型雷达数量/部 | 3~5 |
| 雷达探测半径/km | 10 |
| 防空导弹射程/km | 10 |
| 飞机燃油量/kg | 3 160 |
| 种群数量/个 | 500 |
| 迭代次数/次 | 100 |
| 实验次数/次 | 100 |
Table 2
Experimental results of multi-constraint weight distribution"
| 序号 | 最优适应度均值${\bar G}$Best | 约束条件权重 | 迭代收敛次数均值 | 任务时间均值/min | 最优任务速度/Ma | 任务油耗均值/kg | 曲率约束 |
| 1 | 148.05 | ω1=0.8, ω2=0.1, ω3=0.1 | 25 | 11.3 | 0.6 | 325 | 满足 |
| 2 | 147.33 | ω1=0.1, ω2=0.8, ω3=0.1 | 30 | 5.8 | 1.3 | 650 | 不满足 |
| 3 | 148.60 | ω1=0.1, ω2=0.8, ω3=0.1 | 30 | 6.0 | 1.2 | 635 | 满足 |
| 4 | 149.23 | ω1=0.1, ω2=0.1, ω3=0.8 | 52 | 10.1 | 0.75 | 420 | 满足 |
| 5 | 145.81 | ω1=0.4, ω2=0.2, ω3=0.4 | 32 | 9.93 | 0.8 | 425 | 满足 |
| 6 | 143.12 | ω1=0.2, ω2=0.4, ω3=0.4 | 38 | 7.86 | 1.0 | 540 | 满足 |
| 7 | 145.05 | ω1=0.4, ω2=0.4, ω3=0.2 | 30 | 8.38 | 0.9 | 405 | 满足 |
| 8 | 142.13 | ω1=0.2, ω2=0.3, ω3=0.5 | 45 | 9.4 | 0.78 | 392 | 满足 |
| 9 | 142.66 | ω1=0.3, ω2=0.3, ω3=0.4 | 40 | 9.6 | 0.85 | 398 | 满足 |
| 10 | 142.31 | ω1=0.3, ω2=0.2, ω3=0.5 | 42 | 9.8 | 0.78 | 398 | 满足 |

Fig.10
Effect of constraint weights on paths"


Fig.11
Iterative graph of fitness function"


Fig.12
Random maps generation of optimal paths"

Table 3
Effect of the number of hilltop radars on the results"
| 山顶雷达数量 | 迭代收敛次数 | 适应度值 | 运行时间/s |
| 3 | 42 | 143.15 | 32.6 |
| 45 | 144.10 | 34.5 | |
| 38 | 147.41 | 31.5 | |
| 4 | 47 | 142.86 | 34.2 |
| 51 | 143.67 | 35.8 | |
| 44 | 146.30 | 32.6 | |
| 5 | 55 | 142.67 | 34.5 |
| 58 | 143.22 | 36.7 | |
| 56 | 145.19 | 31.8 |
| 1 | 刘庆健,疏利生,刘刚,等.低空无人机路径规划算法综述[J].航空工程进展,2023,14(2):24-34. |
| LIUQ J,SHUL S,LIUG,et al.A review of path planning algorithms for low-altitude UAVs[J].Advances in Aeronautical Engineering,2023,14(2):24-34. | |
| 2 | TAO W, MIAO Y, XIAO B Q. Research on autonomous control technology of underwater unmanned swarm based on center transfer[C]//Proc. of the IEEE 5th International Conference on Automation, Control and Robotics Engineering, 2020: 405-409. |
| 3 | 陶伟,张晓霜.国外水下无人集群应用及关键技术研究[J].舰船电子工程,2021,41(2):9-13, 54. |
| TAOW,ZHANGX S.Research on application and key technology of underwater unmanned cluster abroad[J].Ship Electronic Engineering,2021,41(2):9-13, 54. | |
| 4 |
AIT-SAADIA,MERAIHIY,SOUKANEA.A novel hybrid chaotic aquila optimization algorithm with simulated annealing for unmanned aerial vehicles path planning[J].Computers and Electrical Engineering,2022,104,108461.
doi: 10.1016/j.compeleceng.2022.108461 |
| 5 |
WUM,CHENW H,TIANX H.Optimal energy consumption path planning for quadrotor UAV transmission tower inspection based on simulated annealing algorithm[J].Energies,2022,15(21):8036.
doi: 10.3390/en15218036 |
| 6 | 郭一聪,刘小雄,章卫国,等.基于改进势场法的无人机三维路径规划方法[J].西北工业大学学报,2020,38(5):977-986. |
| GUOY C,LIUX X,ZHANGW G,et al.An improved potential field method for UAV 3D path planning[J].Journal of Northwestern Polytechnic University,2020,38(5):977-986. | |
| 7 | AKARSUM E,CETⅡNO.Effective solutions for common problems of artificial potential field based path planning algorithms for mobile robots[J].Beykent University Journal of Science and Engineering,2022,15(2):105-120. |
| 8 | OTHMAN W, SHILOV N. Deep reinforcement learning for path planning by cooperative robots: existing approaches and challenges[C]//Proc. of the IEEE 28th Conference of Open Innovations Association, 2021: 349-357. |
| 9 |
THANGARAJM,SANKARS R.Intelligent UAV path planning framework using artificial neural network and artificial potential field[J].Indonesian Journal of Electrical Engineering and Computer Science,2023,29(2):1192-1200.
doi: 10.11591/ijeecs.v29.i2.pp1192-1200 |
| 10 | MOKTADER G N, FAN M Y, LI S J, et al. A modified particle swarm optimization for autonomous UAV path planning in 3D environment[C]//Proc. of the International Conference on Cyber Security and Computer Science, 2020: 180-191. |
| 11 |
ABHISHEKB,RANJITS,SHANKART.Hybrid PSO-HSA and PSO-GA algorithm for 3D path planning in autonomous UAVs[J].SN Applied Sciences,2020,2(11):1805.
doi: 10.1007/s42452-020-03498-0 |
| 12 | 付兴武,胡洋.基于改进粒子群算法的三维路径规划[J].电光与控制,2021,28(3):86-89. |
| FUX W,HUY.3D path planning based on improved particle swarm algorithm[J].Electro-Optics and Control,2021,28(3):86-89. | |
| 13 | 董校成,于浩淼,郭晨.能耗与时间约束下的UUV三维路径规划[J].大连海事大学学报,2022,2(2):11-20. |
| DONGX C,YUH M,GUOC.Three-dimensional path planning for UUV under energy and time constraints[J].Journal of Dalian Maritime University,2022,2(2):11-20. | |
| 14 |
GARRIDOS,MUNOZJ,LOPEZB.FM2 path planner for UAV applications with curvature constraints: a comparative analysis with other planning approaches[J].Sensors,2022,22(9):3174.
doi: 10.3390/s22093174 |
| 15 |
DE-LIMAJ V C F,BELOE M,MARQUESV A D S.Multi-agent path planning with nonlinear restrictions[J].Evolutionary Intelligence,2021,14(1):191-201.
doi: 10.1007/s12065-020-00534-1 |
| 16 |
SHAOS K,SHIW L,ZHAOY J.A new method of solving UAV trajectory planning under obstacles and multi-constraint[J].IEEE Access,2021,9,161161-161180.
doi: 10.1109/ACCESS.2021.3132650 |
| 17 | 黄书召,田军委,乔路,等.基于改进遗传算法的无人机路径规划[J].计算机应用,2021,41(2):390-397. |
| HUANGS Z,TIANJ W,QIAOL,et al.Improved genetic algorithm-based path planning for UAVs[J].Computer Applications,2021,41(2):390-397. | |
| 18 | 王增波,彭仁忠,宫兆刚.B样条曲线生成原理及实现[J].石河子大学学报(自然科学版),2009,27(1):118-121. |
| WANGZ B,PENGR Z,GONGZ G.Principle and implementation of B-sample curve generation[J].Journal of Shihezi University (Natural Science),2009,27(1):118-121. | |
| 19 | 张跃明,薛奇,纪姝婷.满足曲率约束的B样条曲线连续路径平滑方法[J].华中科技大学学报(自然科学版),2022,50(5):59-65, 72. |
| ZHANGY M,XUEQ,JIS T.A continuous path smoothing method for B-sample curves satisfying curvature constraints[J].Journal of Huazhong University of Science and Technology (Natural Science Edition),2022,50(5):59-65, 72. | |
| 20 | 陈东方,蔡良才,朱占卿,等.高原机场飞机转弯过程仿真及侧净空分析[J].飞行力学,2019,37(4):79-82, 87. |
| CHEND F,CAIL C,ZHUZ Q,et al.Simulation of aircraft turning process and side clearance analysis at highland airports[J].Flight Mechanics,2019,37(4):79-82, 87. | |
| 21 | 赵雷通,谢春生,张兆宁.航路爬升速度与爬升耗油函数模型研究[J].中国民航飞行学院学报,2014,25(6):5-8, 23. |
| ZHAOL T,XIEC S,ZHANGZ N.Study on the modeling of flight path climb speed and climb fuel consumption function[J].Journal of Civil Aviation Flight Academy of China,2014,25(6):5-8, 23. | |
| 22 | 刘薇,马雪,孙俊鹏.飞机爬升、下降与机动飞行性能计算软件的开发[J].长沙航空职业技术学院学报,2019,19(3):61-67. |
| LIUW,MAX,SUNJ P.Development of software for calculating aircraft climb, descent and maneuvering flight perfor-mance[J].Journal of Changsha Aviation Vocational and Technical College,2019,19(3):61-67. |
| [1] | Lei YU, Yipin LIU, Yinsheng WEI. Anti-mainlobe jamming method via blind extraction based on maximizing SINR [J]. Systems Engineering and Electronics, 2024, 46(9): 2968-2979. |
| [2] | Yuqi XIA, Yanyan HUANG, Qia CHEN. Path planning for unmanned vehicle reconnaissance based on deep Q-network [J]. Systems Engineering and Electronics, 2024, 46(9): 3070-3081. |
| [3] | Bowen FEI, Weidong BAO, Daqian LIU, Xiaomin ZHU. Air-ground cooperative autonomous task allocation method for dynamic target search and strike [J]. Systems Engineering and Electronics, 2024, 46(7): 2346-2358. |
| [4] | Jie LI, Yuejin TAN. Operation loop recommendation method based on integrated improved ant colony algorithm [J]. Systems Engineering and Electronics, 2024, 46(6): 2002-2012. |
| [5] | Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755. |
| [6] | Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm [J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. |
| [7] | Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG. Research on UAV path planning method based on the multi-precision planning windows [J]. Systems Engineering and Electronics, 2024, 46(5): 1767-1776. |
| [8] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [9] | Guixiang ZHAO, Jian ZHOU, Yunmiao LI, Chenxu WANG. Improved bi-directional rapidly-exploring random tree path planning for USV [J]. Systems Engineering and Electronics, 2024, 46(4): 1364-1371. |
| [10] | Yinfei WU, Xinkai LI, Hongli ZHANG, Yingying CHEN, Fengjin GONG. Optimization and design of virtual tube based on elastic area characteristics [J]. Systems Engineering and Electronics, 2024, 46(11): 3862-3873. |
| [11] | Heng TANG, Wei SUN, Lei LYU, Ruofei HE, Jianjun WU, Changhao SUN, Tianye SUN. UAV formation path planning approach incorporating dynamic reward strategy [J]. Systems Engineering and Electronics, 2024, 46(10): 3506-3518. |
| [12] | Zihao CHEN, Juan LI, Chang LIU, Jie LI, Xiaoyu LIU. Task planning method for coordinated attacks on ground targets under time constraints [J]. Systems Engineering and Electronics, 2023, 45(8): 2353-2360. |
| [13] | Ying ZENG, Yanfeng LI, Hongyi WANG, Huaming QIAN, Hongzhong HUANG. Reliability analysis of industrial robot driver combining MRGP and PSO [J]. Systems Engineering and Electronics, 2023, 45(8): 2643-2650. |
| [14] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| [15] | Liyao WU, Xichao SU, Lei WANG, Zishuang PAN. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||