Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (12): 4203-4212.doi: 10.12305/j.issn.1001-506X.2024.12.29
• Guidance, Navigation and Control • Previous Articles
INS/5G integrated navigation method based on improved EMD-CIIT denoising algorithm
Yunlong ZHAO1,2, Qian SUN1,2,*, Xin JIAN1,2, Yibing LI1,2, Fe YU3
- 1. College of Information and Communication Engineering, Harbin Engineering University, Harbin 150001, China
2. Key Laboratory of Advanced Marine Communication and Information Technology, Harbin Engineering University, Harbin 150001, China
3. College of Mathematical Sciences, Harbin Engineering University, Harbin 150001, China
-
Received:2024-01-18Online:2024-11-25Published:2024-12-30 -
Contact:Qian SUN
CLC Number:
Cite this article
Yunlong ZHAO, Qian SUN, Xin JIAN, Yibing LI, Fe YU. INS/5G integrated navigation method based on improved EMD-CIIT denoising algorithm[J]. Systems Engineering and Electronics, 2024, 46(12): 4203-4212.
share this article
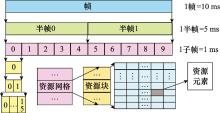
Fig.1
5G frame's structure"


Fig.2
Pseudo-range measurement process based on 5G opportunity signal"


Fig.3
Flowchart of EMD-CIIT algorithm"


Fig.4
Bumps signals processed by different denoising algorithms"


Fig.5
Blocks signals processed by different denoising algorithm"


Fig.6
Results comparison of Bumps denoising algorithms under different SNR input"


Fig.7
Results comparison of Blocks denoising algorithms under different SNR input"

Table 1
Layout of 5G base stations"
| 5G基站 | 纬度 | 经度 | 高度/m | 5G基站 | 纬度 | 经度 | 高度/m | |
| gNB1 | 114°8′50.82″ | 22°17′6.94″ | 108.8 | gNB11 | 114°8′49.63″ | 22°17′5.22″ | 20 | |
| gNB2 | 114°8′50.46″ | 22°17′6.43″ | 108.8 | gNB12 | 114°8′49.58″ | 22°17′5.18″ | 20 | |
| gNB3 | 114°8′51.18″ | 22°17′6.76″ | 108.8 | gNB13 | 114°8′49.74″ | 22° 17′5.04″ | 20 | |
| gNB4 | 114°8′52.3″ | 22°17′6.31″ | 108.8 | gNB14 | 114°8′49.83″ | 22°17′5.02″ | 54 | |
| gNB5 | 114°8′52.32″ | 22°17′6.3″ | 68.0 | gNB15 | 114°8′49.64″ | 22°17′5.43″ | 10 | |
| gNB6 | 114°8′52.45″ | 22°17′5.98″ | 68.0 | gNB16 | 114°8′49.93″ | 22°17′5.76″ | 10 | |
| gNB7 | 114°8′52.91″ | 22°17′6.59″ | 20.0 | gNB17 | 114°8′49.68″ | 22°17′6.29″ | 21 | |
| gNB8 | 114°8′49.98″ | 22°17′5.04″ | 41.0 | gNB18 | 114°8′49.63″ | 22°17′6.68″ | 21 | |
| gNB9 | 114°8′51.58″ | 22°17′5.57″ | 20.0 | gNB19 | 114°8′51.44″ | 22°17′5.96″ | 68 | |
| gNB10 | 114°8′49.92″ | 22°17′5.07″ | 20.0 | gNB20 | 114°8′51.43″ | 22°17′5.31″ | 68 |
Table 2
Coordinates of seven sampling points"
| 采样点 | 纬度 | 经度 | 高度/m |
| 1 | 114°8′49.27″ | 22°17′2.65″ | 0 |
| 2 | 114°8′52.2″ | 22°17′6.27″ | 0 |
| 3 | 114°8′50.08″ | 22°17′4.86″ | 0 |
| 4 | 114°8′49.08″ | 22°17′5.64″ | 0 |
| 5 | 114°8′52.33″ | 22°17′3.74″ | 0 |
| 6 | 114°8′50.78″ | 22°17′5.35″ | 0 |
| 7 | 114°8′50.64″ | 22°17′ 4.38″ | 0 |
Table 3
IMU simulation error parameters setting"
| 参数 | 数值 |
| 加速度计零偏/mg | 1.0 |
| 陀螺仪零偏/(0°/h) | 65 |
| 加速度计噪声/(m·s-1·h-0.5) | 0.02 |
| 陀螺仪噪声/(°·h-0.5) | 0.15 |
| 加速度计随机游走/(m·s-2·Hz-0.5) | 0.000 2 |
| 陀螺仪随机游走/(°·h-0.5) | 0.034 4 |

Fig.8
5G base stations and sampling point's locations"


Fig.9
Algorithm positioning errors of seven sampling points during pseudo-range anomaly period"


Fig.10
Positioning error of algorithms throughout the third sampling point's full time period"

Table 4
Positioning error of different algorithms throughout the third sampling point's full time period m"
| 定位算法 | RMSE | 均值 |
| 改进卡尔曼滤波 | 1.95 | 1.66 |
| 卡尔曼滤波 | 2.05 | 1.73 |
| 5G伪距多边测距 | 7.04 | 5.64 |
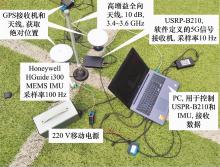
Fig.11
Experimental equipment"

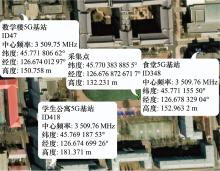
Fig.12
Information of 5G base stations and data sampling point"


Fig.13
Comparison of positioning errors of different algorithms"
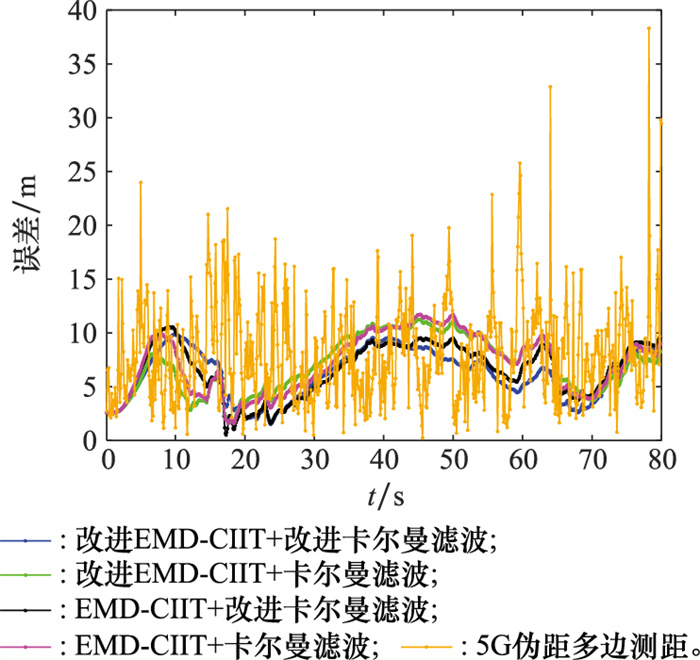
Table 5
Comparison of algorithms' positioning error results m"
| 定位算法 | RMSE | 均值 |
| 改进EMD-CIIT+改进卡尔曼滤波 | 6.60 | 6.18 |
| 改进EMD-CIIT+传统卡尔曼滤波 | 7.46 | 7.00 |
| 传统EMD-CIIT+改进卡尔曼滤波 | 6.93 | 6.48 |
| 传统EMD-CIIT+传统卡尔曼滤波 | 7.64 | 7.14 |
| 5G伪距多边测距 | 9.31 | 8.09 |
| 1 |
GUOX S,ANSARIN,LIL,et al.A hybrid positioning system for location-based services: design and implementation[J].IEEE Communications Magazine,2020,58(5):90-96.
doi: 10.1109/MCOM.001.1900737 |
| 2 | 王巍,邢朝洋,冯文帅.自主导航技术发展现状与趋势[J].航空学报,2021,42(11):525049. |
| WANGW,XINGZ Y,FENGW S.State of the art and perspectives of autonomous navigation technology[J].Acta Aeronautica et Astronautica Sinica,2021,42(11):525049. | |
| 3 | 刘涵,方胜良,范有臣,等.机会信号导航综述[J].兵器装备工程学报,2022,43(7):78-86, 158. |
| LIUH,FANGS L,FANY C,et al.Review of navigation via signals of opportunity[J].Journal of Ordnance Equipment Engineering,2022,43(7):78-86, 158. | |
| 4 |
NEINAVAIEM,KHALIFEJ,KASSASZ M.Cognitive detection of unknown beacons of terrestrial signals of opportunity for localization[J].IEEE Trans.on Wireless Communications,2023,22(8):5613-5627.
doi: 10.1109/TWC.2023.3235681 |
| 5 |
DWIVEDIS,SHREEVASTAVR,MUNIERF,et al.Positioning in 5G networks[J].IEEE Communications Magazine,2021,59(11):38-44.
doi: 10.1109/MCOM.011.2100091 |
| 6 |
MOGYOROSIF,REVISNYEIP,PASICA,et al.Positioning in 5G and 6G networks—a survey[J].Sensors,2022,22(13):4757.
doi: 10.3390/s22134757 |
| 7 |
WYMEERSCHH,SECO-GRANADOSG,DESTINOG,et al.5G mmWave positioning for vehicular networks[J].IEEE Wireless Communications,2017,24(6):80-86.
doi: 10.1109/MWC.2017.1600374 |
| 8 |
BOCCARDIF,HEATHR W,LOZANOA,et al.Five disruptive technology directions for 5G[J].IEEE Communications Magazine,2014,52(2):74-80.
doi: 10.1109/MCOM.2014.6736746 |
| 9 |
DAMJANCEVICS A,MATUSE,UTYANSKYD,et al.Channel estimation for advanced 5G/6G use cases on a vector digital signal processor[J].IEEE Open Journal of Circuits and Systems,2021,2,265-277.
doi: 10.1109/OJCAS.2020.3047007 |
| 10 | POHLMANN R, ZHANG S, DAMMANN A, et al. Manifold optimization based beamforming for DOA and DOD estimation with a single multi-mode antenna[C]//Proc. of the 28th European Signal Processing Conference, 2021: 1841-1845. |
| 11 |
CAMAJORIT B,BRAMBILLAM,ITALIANOL,et al.A feasibility study of 5G positioning with current cellular network deployment[J].Scientific Reports,2023,13(1):15281.
doi: 10.1038/s41598-023-42426-1 |
| 12 | 金天,姚钧天,刘波,等.基于5G移动通信参考信号的机会信号测距测向技术[J].无线电工程,2023,53(12):2834-2841. |
| JINT,YAOJ T,LIUB,et al.Ranging and direction-finding technology of signal of opportunity based on reference signal of 5G mobile communication system[J].Radio Engineering,2023,53(12):2834-2841. | |
| 13 | 赵新平,李高飞,冀杰,等.基于自适应粒子群算法的煤矿井下高精度定位方法[J].电子设计工程,2023,31(8):25-31. |
| ZHAOX P,LIG F,JIJ,et al.High-precision positioning method for underground coal mine based on adaptive PSO algorithm[J].Electronic Design Engineering,2023,31(8):25-31. | |
| 14 | SHAMAEIK,KASSASZ M.Receiver design and time of arrival estimation for opportunistic localization with 5G signals[J].IEEE Trans.on Wireless Communications,2024,20(7):4716-4731. |
| 15 | CHENL,ZHOUX,CHENF F,et al.Carrier phase ranging for indoor positioning with 5G NR signals[J].IEEE Internet of Things Journal,2021,9(13):10908-10919. |
| 16 |
LIW G,XUY Q,ZHANGC M,et al.Multi-frequency-ranging positioning algorithm for 5G OFDM communication systems[J].Chinese Journal of Electronics,2023,32(4):773-784.
doi: 10.23919/cje.2021.00.124 |
| 17 | KASSASZ,ABDALLAHA,ORABIM.Carpe signum: seize the signal-opportunistic navigation with 5G[J].Inside GNSS Magazine,2021,16(1):52-57. |
| 18 | NARAYANAN A, ZHANG X, ZHU R, et al. A variegated look at 5G in the wild: performance, power, and QoE implications[C]//Proc. of the ACM SIGCOMM Conference, 2021: 610-625. |
| 19 |
ZHANGQ,NIUX J,SHIC.Impact assessment of various IMU error sources on the relative accuracy of the GNSS/INS systems[J].IEEE Sensors Journal,2020,20(9):5026-5038.
doi: 10.1109/JSEN.2020.2966379 |
| 20 |
HUANGH C,CRESSIEN.Deterministic/stochastic wavelet decomposition for recovery of signal from noisy data[J].Technometrics,2000,42(3):262-276.
doi: 10.1080/00401706.2000.10486047 |
| 21 |
HALIDOUA,MOHAMADOUY,ARIA A A,et al.Review of wavelet denoising algorithms[J].Multimedia Tools and Applications,2023,82(27):41539-41569.
doi: 10.1007/s11042-023-15127-0 |
| 22 |
OSADCHIYA,KAMENEVA,SAHAROVV,et al.Signal processing algorithm based on discrete wavelet transform[J].Designs,2021,5(3):41.
doi: 10.3390/designs5030041 |
| 23 |
KLIONSKIYD,KUPRIYANOVM,KAPLUND.Signal denoising based on empirical mode decomposition[J].Journal of Vibroengineering,2017,19(7):5560-5570.
doi: 10.21595/jve.2017.19239 |
| 24 | JENAB B,MISHRAL N,PAIKRAYS K,et al.Approximation of signals by general matrix summability with effects of Gibbs phenomenon[J].Boletim da Sociedade Paranaense de Matematica,2020,38(6):141-158. |
| 25 |
CHENJ,LIX,MOHAMEDM A,et al.An adaptive matrix pencil algorithm based-wavelet soft-threshold denoising for analysis of low frequency oscillation in power systems[J].IEEE Access,2020,8,7244-7255.
doi: 10.1109/ACCESS.2020.2963953 |
| 26 | 秦品乐,林焰,陈明.基于平移不变小波阈值算法的经验模态分解方法[J].仪器仪表学报,2008,29(12):2637-2641. |
| QINP L,LINY,CHENM.Empirical mode decomposition method based on wavelet with translation invariance algorithm[J].Chinese Journal of Scientific Instrument,2008,29(12):2637-2641. | |
| 27 |
ASHRAFH,WARISA,GILANIS O,et al.Threshold parameters selection for empirical mode decomposition-based EMG signal denoising[J].Intelligent Automation and Soft Computing,2021,27(3):799-815.
doi: 10.32604/iasc.2021.014765 |
| 28 |
ASHRAFH,SHAFIQU,SAJJADQ,et al.Variational mode decomposition for surface and intramuscular EMG signal denoising[J].Biomedical Signal Processing and Control,2023,82,104560.
doi: 10.1016/j.bspc.2022.104560 |
| 29 |
KOPSINISY,MCLAUGHLINS.Development of EMD-based denoising methods inspired by wavelet thresholding[J].IEEE Trans.on Signal Processing,2009,57(4):1351-1362.
doi: 10.1109/TSP.2009.2013885 |
| 30 |
NEZHADSHAHBODAGHIM,MOSAVIM R.A loosely-coupled EMD-denoised stereo VO/INS/GPS integration system in GNSS- denied environments[J].Measurement,2021,183,109895.
doi: 10.1016/j.measurement.2021.109895 |
| 31 | TANG G J, YAN X L, WANG X L. Chaotic signal denoising based on adaptive smoothing multiscale morphological filtering[EB/OL]. [2023-12-18]. https://onlinelibrary.wiley.com/doi/10.1155/2020/7242943. |
| [1] | Xirui XUE, Shucai HUANG, Daozhi WEI, Jianfeng WU. Destination prediction of UAV cluster trajectory based on EMD-DESN [J]. Systems Engineering and Electronics, 2024, 46(1): 290-299. |
| [2] | Yanling SHI, Zipeng LIU, Xueliang ZHANG, Weiliang GU. Feature detection of floating small target on the sea surface based on EMD energy proportion [J]. Systems Engineering and Electronics, 2021, 43(2): 300-310. |
| [3] | Zhenghong PENG, Degui YANG, Xing WANG, Hao WANG, Zhengliang ZHU. Micro-Doppler separation and feature extraction algorithm based on trend estimation [J]. Systems Engineering and Electronics, 2021, 43(12): 3452-3461. |
| [4] | GE Baoshuang, ZHANG Hai, JIN Yanqiong. Redundant measurement based method for online mitigation of GNSS multipath errors [J]. Systems Engineering and Electronics, 2019, 41(11): 2581-2587. |
| [5] | WANG Lu, LI Jianxun, HE Tingting. Denoising algorithm of pulsar signal based on EMD with kurtosis test window [J]. Systems Engineering and Electronics, 2017, 39(6): 1208-1214. |
| [6] | CHEN Hailong, WANG Changlong, ZUO Xianzhang, ZHU Hongyun. Metal magnetic memory gradient tensor signal processing method [J]. Systems Engineering and Electronics, 2017, 39(3): 488-493. |
| [7] | LU Zhi-mao, SUN Mei-ling, ZHANG Chun-xiang, JIN Hui. Speech enhancement method based on extremum field mean mode decomposition [J]. Journal of Systems Engineering and Electronics, 2011, 33(7): 1680-1684. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||