Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (12): 4192-4202.doi: 10.12305/j.issn.1001-506X.2024.12.28
• Guidance, Navigation and Control • Previous Articles
Energy coordinated online trajectory planning and tracking for terrain following flight
Rinan ZHU1, Biao WANG1,2,*, Hanwen ZHANG1, Chaoying TANG1, Jinfa XU3
- 1. College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
2. Peng Cheng Laboratory, Shenzhen 518000, China
3. National Key Laboratory of Rotorcraft Aeromechanics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
-
Received:2023-10-12Online:2024-11-25Published:2024-12-30 -
Contact:Biao WANG
CLC Number:
Cite this article
Rinan ZHU, Biao WANG, Hanwen ZHANG, Chaoying TANG, Jinfa XU. Energy coordinated online trajectory planning and tracking for terrain following flight[J]. Systems Engineering and Electronics, 2024, 46(12): 4192-4202.
share this article
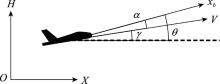
Fig.1
Longitudinal kinematic model of aircraft"


Fig.2
Different landforms and their terrain roughness"


Fig.3
Terrain following CMPC online trajectory planning and tracking scheme"

Table 1
MPC trajectory planner parameters"
| 参数 | 数值 |
| 规划器执行周期Tc/s | 2 |
| 预测模型采样时间Ts/s | 0.5 |
| 误差权重qe | 0.03 |
| 控制权重ru, rv | 1, 1 |
| 时域限制Nmin, Nmax | 15, 50 |
| 自适应时域比例系数k | 10 |
| 航迹角约束/(°) | [-20, 20] |
| 地速约束/(m/s) | [180, 220] |
| 法向加速度约束/g | [-2, 2] |
| 安全离地高度H0/m | 50 |
Table 2
MPC trajectory tracking controller parameters"
| 参数 | 数值 |
| 跟踪器采样时间Tc/s | 0.1 |
| 预测模型采样时间Ts/s | 0.1 |
| 误差权重矩阵Qe | diag[0.001, 0.003, 0.05] |
| 控制权重矩阵RΔu | diag[2 000, 15] |
| 控制时域Nc | 5 |
| 预测时域Np | 25 |
| 油门开度约束 | [0, 1] |
| 升降舵偏角约束/(°) | [-30, 30] |
| 升降舵偏角变化率约束/(°/s) | [-60, 60] |

Fig.4
Comparison of trajectory between cubic spline and CMPC fixed speed scheme"

Fig.5
Comparison of trajectory between cubic spline and CMPC energy coordination scheme"


Fig.6
Comparisons of flight path angle and normal acceleration of three schemes"


Fig.7
Flying over the peak with CMPC energy coordination scheme"


Fig.8
Leaping over the valley with CMPC energy coordination scheme"


Fig.9
Impact of virtual control variables on flight status"
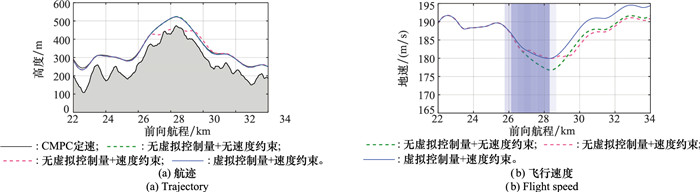
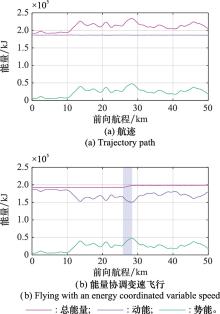
Fig.10
Energy change curve of CMPC scheme"


Fig.11
Energy change rate and distribution rate of CMPC scheme"


Fig.12
Throttle opening comparison"

Table 3
Comparison of fuel consumption and voyage loss"
| 飞行方案 | 油耗(无量纲) | 航程损失/% |
| 定速平飞(基准) | 60.60 | - |
| CMPC定速 | 64.65 | 6.68 |
| CMPC能量协调 | 58.73 | -3.09 |

Fig.13
Trajectory comparison of time-domain schemes with different planners"


Fig.14
Time-domain variations of adaptive time-domain scheme of planner"


Fig.15
Time consumptions of online planning for different planners time-domain schemes"

| 1 |
KAZEMIFAR O , BABAEI A R , MORTAZAVI M . Online aircraft velocity and normal acceleration planning for rough terrain following[J]. Aeronautical Journal, 2017, 121 (1244): 1561- 1577.
doi: 10.1017/aer.2017.27 |
| 2 | 郑衍杲. 超低空突防中地形跟随/回避技术[J]. 航空学报, 1985, 6 (4): 313- 320. |
| ZHENG Y G . Terrain following/avoidance technique of very low altitude penetration[J]. Acta Aeronautica et Astronautica Sinica, 1985, 6 (4): 313- 320. | |
| 3 | 王建平, 沈春林. 地形跟随适应角控制方法[J]. 航空学报, 1992, 13 (12): 670- 677. |
| WANG J P , SHEN C L . The adaptive angle control method of terrain following[J]. Acta Aeronautica et Astronautica Sinica, 1992, 13 (12): 670- 677. | |
| 4 |
CHENG Y Q , WU H , YANG Z , et al. Underwater target detection by measuring water-surface vibration with millimeter-wave radar[J]. IEEE Antennas and Wireless Propagation Letters, 2023, 22 (9): 2260- 2264.
doi: 10.1109/LAWP.2023.3283309 |
| 5 | CHEN Y , LIU H L . Overview of landmarks for autonomous, vision-based landing of unmanned helicopters[J]. IEEE Aerospace & Electronic Systems Magazine, 2016, 31 (5): 14- 27. |
| 6 |
HO H W , DE-CROON G , VAN-KAMPEN E , et al. Adaptive gain control strategy for constant optical flow divergence landing[J]. IEEE Trans. on Robotics, 2018, 34 (2): 508- 516.
doi: 10.1109/TRO.2018.2817418 |
| 7 | 黄鹏程, 王彪, 唐超颖, 等. 地形跟随飞行中光轴搜索策略[J]. 探测与控制学报, 2022, 44 (3): 79- 83. |
| HUANG P C , WANG B , TANG C Y , et al. Optical axis search strategies in terrain following flight[J]. Journal of Detection & Control, 2022, 44 (3): 79- 83. | |
| 8 | DE-FILIPPIS L , GUGLIERI G , QUAGLIOTTI F . Path planning strategies for UAVS in 3D environments[J]. Journal of Intelligent and Robotic Systems: Theory and Applications, 2012, 65 (1/4): 247- 264. |
| 9 |
HU C F , ZHAO L X , QU G . Event-triggered model predictive adaptive dynamic programming for road intersection path planning of unmanned ground vehicle[J]. IEEE Trans. on Vehicular Technology, 2021, 70 (11): 11228- 11243.
doi: 10.1109/TVT.2021.3111692 |
| 10 |
WANG P Y , LIU Y L , YAO W M , et al. Improved A-star algorithm based on multivariate fusion heuristic function for autonomous driving path planning[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2023, 237 (7): 1527- 1542.
doi: 10.1177/09544070221100677 |
| 11 |
WANG J K , LIU J B , CHEN W N , et al. Robot path planning via neural-network-driven prediction[J]. IEEE Trans. on Artificial Intelligence, 2022, 3 (3): 451- 460.
doi: 10.1109/TAI.2021.3119890 |
| 12 |
JAMSHIDI V , NEKOUKAR V , HOSSEIN R M . Implementation of UAV smooth path planning by improved parallel genetic algorithm on controller area network[J]. Journal of Aerospace Engineering, 2022, 35 (2): 04021136.
doi: 10.1061/(ASCE)AS.1943-5525.0001395 |
| 13 | 王彪, 董超, 黄毅, 等. 地形跟随中的航迹规划与跟踪[J]. 电光与控制, 2021, 28 (3): 31- 35. |
| WANG B , DONG C , HUANG Y , et al. Path planning and tracking in terrain following[J]. Electronics Optics & Control, 2021, 28 (3): 31- 35. | |
| 14 |
GAPEYENKO M , MOLTCHANOV D , ANDREEV S , et al. Line-of-sight probability for mmwave-based UAV communications in 3D urban grid deployments[J]. IEEE Trans. on Wireless Communications, 2021, 20 (10): 6566- 6579.
doi: 10.1109/TWC.2021.3075099 |
| 15 |
NELSON D R , BARBER D B , MCLAIN T W , et al. Vector field path following for miniature air vehicles[J]. IEEE Trans. on Robotics, 2007, 23 (3): 519- 529.
doi: 10.1109/TRO.2007.898976 |
| 16 |
GONCALVES V M , PIMENTA L C , MAIA C A , et al. Vector fields for robot navigation along time-varying curves in n-dimensions[J]. IEEE Trans. on Robotics, 2010, 26 (4): 647- 659.
doi: 10.1109/TRO.2010.2053077 |
| 17 |
WANG X M , ROY S , FARI S , et al. Adaptive vector field guidance without a priori knowledge of course dynamics and wind[J]. IEEE/ASME Trans. on Mechatronics, 2022, 27 (6): 4597- 4607.
doi: 10.1109/TMECH.2022.3160480 |
| 18 |
YU H X , ZHAO C X , LI S , et al. Pre-work for the birth of driver-less scraper(LHD)in the underground mine: the path tracking control based on an LQR controller and algorithms comparison[J]. Sensors, 2021, 21 (23): 7839.
doi: 10.3390/s21237839 |
| 19 |
LUO S Z , SUN Q L , WU W N , et al. Accurate flight path tracking control for powered parafoil aerial vehicle using ADRC-based wind feedforward compensation[J]. Aerospace Science and Technology, 2019, 84, 904- 915.
doi: 10.1016/j.ast.2018.11.022 |
| 20 |
WESTENBERGER J , DE-WAGTER C , DE-CROON G . Efficient Bang-Bang model predictive control for quadcopters[J]. Unmanned Systems, 2022, 10 (4): 395- 405.
doi: 10.1142/S2301385022410060 |
| 21 |
WANG Z L , GAO F , ZHAO Y , et al. Improved A* algorithm and model predictive control-based path planning and tracking framework for hexapod robots[J]. Industrial Robot, 2023, 50 (1): 135- 144.
doi: 10.1108/IR-01-2022-0028 |
| 22 | WANG X W , YAO X L , ZHANG L . Path planning under constraints and path following control of autonomous underwater vehicle with dynamical uncertainties and wave disturbance[J]. Journal of Intelligent and Robotic System: Theory and Application, 2020, 99 (3/4): 891- 908. |
| 23 |
XING X T , ZHAO B L , HAN C , et al. Vehicle motion planning with joint Cartesian-Frenet MPC[J]. IEEE Robotics and Automation Letters, 2022, 7 (4): 10738- 10745.
doi: 10.1109/LRA.2022.3194330 |
| 24 |
ZHANG M , HAO S , WU D F , et al. Time-optimal obstacle avoidance of autonomous ship based on nonlinear model predictive control[J]. Ocean Engineering, 2022, 266, 112591.
doi: 10.1016/j.oceaneng.2022.112591 |
| 25 |
NIU Z J , JIA X H , YAO W . Communication-free MPC-based neighbors trajectory prediction for distributed multi-UAV motion planning[J]. IEEE Access, 2022, 10, 13481- 13489.
doi: 10.1109/ACCESS.2022.3148145 |
| 26 |
LIN X , YU Y J , CHEN S Z , et al. An improved APF method for complex and dynamic obstacles' avoidance[J]. Unmanned System, 2023, 11 (2): 175- 189.
doi: 10.1142/S2301385023410054 |
| 27 |
LIN P F , TSUKADA M . Model predictive path-planning controller with potential function for emergency collision avoidance on highway driving[J]. IEEE Robotics and Automation Letters, 2022, 7 (2): 4662- 4669.
doi: 10.1109/LRA.2022.3152693 |
| 28 |
MIAO B R , HAN C . Intelligent vehicle obstacle avoidance path-tracking control based on adaptive model predictive control[J]. Mechanical Sciences, 2023, 14 (1): 247- 258.
doi: 10.5194/ms-14-247-2023 |
| 29 | LIU J , QIN X L , QI B L , et al. 3D online path planning of UAV based on improved differential evolution and model predictive control[J]. International Journal of Innovative Computing, Information and Control, 2020, 16 (1): 315- 329. |
| 30 |
LI Y H , FAN J K , LIU Y , et al. Path planning and path tracking for autonomous vehicle based on MPC with adaptive dual-horizon-parameters[J]. International Journal of Automotive Technology, 2022, 23 (5): 1239- 1253.
doi: 10.1007/s12239-022-0109-8 |
| 31 | 卜瑞宇. 基于模型预测控制的地形跟随飞行研究[D]. 南京: 南京航空航天大学, 2023. |
| BU R Y. Research on terrain following flight based on model predictive control[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2023. |
| [1] | Zichun XIONG, Yongshan LIU. Flight vehicle midcourse trajectory fast planning for low-speed target [J]. Systems Engineering and Electronics, 2024, 46(7): 2424-2436. |
| [2] | Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755. |
| [3] | Haikuo ZHANG, Xiuyun MENG. UAV online trajectory planning based on improved RRT* algorithm [J]. Systems Engineering and Electronics, 2024, 46(12): 4157-4164. |
| [4] | Yujie LIU, Yue LI, Wei HAN, Kaikai CUI. Trajectory planning for penetration of multi-aircraft for mation based on improved convex optimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(9): 2819-2830. |
| [5] | Zhengda CUI, Mingying WEI, Yunqian LI. Cooperative trajectory planning method in later part of midcourse based on velocity estimation [J]. Systems Engineering and Electronics, 2023, 45(9): 2912-2921. |
| [6] | Chao SONG, Bo LI, Yunhong MA, Jingyi HUANG. 3D UAV trajectory planning based on optimized A* and MPC fusion algorithm [J]. Systems Engineering and Electronics, 2023, 45(12): 3995-4004. |
| [7] | Hanyang WANG, Liang CHEN, Hai XU, Jingbo BAI. UAV online trajectory planning based on MOEA/D-ARMS [J]. Systems Engineering and Electronics, 2022, 44(11): 3505-3514. |
| [8] | Xiaohai WANG, Xiuyun MENG, Chuanxu LI. Design of trajectory tracking controller for UAV based on MPC [J]. Systems Engineering and Electronics, 2021, 43(1): 191-198. |
| [9] | Honghai ZHANG, Xiaopeng QIAN, Xinwei WU, Hao LIU, Yu TIAN, Lichao WANG. Cooperative trajectory planning for UAV formation based onpath-speed decoupling [J]. Systems Engineering and Electronics, 2020, 42(9): 1976-1987. |
| [10] | MU Lingxia, LI Ping, LI Leyao, WANG Xinmin, XIE Rong. Onboard trajectory planning algorithm for terminal area energy management phase of a RLV [J]. Systems Engineering and Electronics, 2017, 39(3): 591-598. |
| [11] | ZHOU Wen-ya1, WANG En-mei1, WU Zhi-gang1,2. Rapid planning of reentry trajectory with high reliability [J]. Systems Engineering and Electronics, 2016, 38(8): 1867-1872. |
| [12] | ZHANG Yi, YANG Xiu-xia, ZHOU Wei-wei. Velocity obstaclesbased collision avoidance feasible trajectory planning optimization algorithm for multiple UAV [J]. Systems Engineering and Electronics, 2015, 37(2): 323-330. |
| [13] | WANG Yin1, YAO Keming2, LU Yuping3. Design of reentry trajectory based on neural dynamic optimization method [J]. Systems Engineering and Electronics, 2015, 37(10): 2347-2351. |
| [14] | HUANG Chang-qiang,LIU He-ming,HUANG Han-qiao, CHENG Hua, CHEN Shao-hua. Online UCAV attacking trajectory planning in uncertain environment [J]. Systems Engineering and Electronics, 2014, 36(8): 1558-1565. |
| [15] | TANG Xian-lun,LI Yang,LI Peng,ZHANG Yi. Multi-step model predictive control based on SVR multi-Agent particle swarm optimization algorithm [J]. Systems Engineering and Electronics, 2014, 36(5): 958-964. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||