Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (7): 2424-2436.doi: 10.12305/j.issn.1001-506X.2024.07.24
• Guidance, Navigation and Control • Previous Articles
Flight vehicle midcourse trajectory fast planning for low-speed target
Zichun XIONG, Yongshan LIU
- School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China
-
Received:2023-06-09Online:2024-06-28Published:2024-07-02 -
Contact:Yongshan LIU
CLC Number:
Cite this article
Zichun XIONG, Yongshan LIU. Flight vehicle midcourse trajectory fast planning for low-speed target[J]. Systems Engineering and Electronics, 2024, 46(7): 2424-2436.
share this article

Fig.1
Block diagram of flight vehicle receding trajectory planning framework and tracking control system"


Fig.2
Principle of flight duration adjustment algorithm"

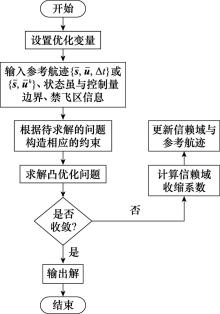
Fig.3
SCP algorithm flow chart"


Fig.4
Flow chart of IRTG-MPC-SCP trajectory planning algorithm"

Table 1
Setting of no-fly-zone in Condition 1 m"
| 禁飞区编号 | 中心位置 | 半径 |
| 1 | (100 000, 90 000) | 60 000 |
| 2 | (300 000, 200 000) | 60 000 |
| 3 | (150 000, 200 000) | 50 000 |
Table 2
Setting of no-fly-zone in Condition 2 m"
| 禁飞区编号 | 中心位置 | 半径 |
| 1 | (13 000, 8 000) | 5 000 |
| 2 | (29 000, 17 000) | 5 000 |

Fig.5
Flight trajectory in Condition 1"


Fig.6
Flight trajectory in Condition 2"


Fig.7
Heading angle, speed, and controls in Condition 1"

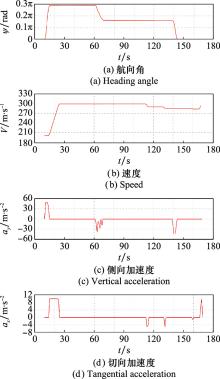
Fig.8
Heading angle, speed, and controls in Condition 2"


Fig.9
Duration of flight in receding plannings"


Fig.10
SCP iteration number and runtime"


Fig.11
Start time of receding plannings"


Fig.12
Trajectories generated by different algorithms"
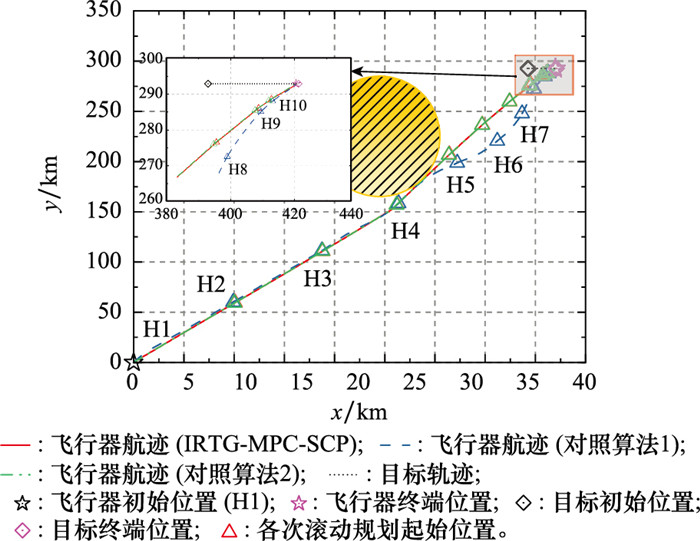
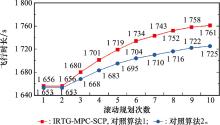
Fig.13
Flight time generated by different algorithms"


Fig.14
SCP iteration number and runtime of different algorithms"

| 1 |
DRAKE D , KOZIOL S , CHABOT E . Mobile robot path planning with a moving goal[J]. IEEE Access, 2018, 6, 12800- 12814.
doi: 10.1109/ACCESS.2018.2797070 |
| 2 |
PHUNG M D , HA Q P . Motion-encoded particle swarm optimization for moving target search using UAVs[J]. Applied Soft Computing, 2020, 97, 106705.
doi: 10.1016/j.asoc.2020.106705 |
| 3 | TRIHARMINTO H H, ADJI T B, SETIAWAN N A. Dynamic UAV path planning for moving target intercept in 3D[C]//Proc. of the IEEE 2nd International Conference on Instrumentation Control and Automation, 2011: 157-161. |
| 4 |
MEYER Y , ISAIAH P , SHIMA T . On Dubins paths to intercept a moving target[J]. Automatica, 2015, 53, 256- 263.
doi: 10.1016/j.automatica.2014.12.039 |
| 5 | BEUL M, BEHNKE S. Fast full state trajectory generation for multirotors[C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2017: 408-416. |
| 6 |
ZHENG Y , CHEN Z , SHAO X M , et al. Time-optimal guidance for intercepting moving targets with impact-angle constraints[J]. Chinese Journal of Aeronautics, 2022, 35 (7): 157- 167.
doi: 10.1016/j.cja.2021.08.002 |
| 7 | LIU Y, WANG Y D, DONG L. USV target interception control with reinforcement learning and motion prediction method[C]//Proc. of the IEEE 37th Youth Academic Annual Conference of Chinese Association of Automation, 2022: 1050-1054. |
| 8 | 王祝, 刘莉, 龙腾, 等. 基于罚函数序列凸规划的多无人机轨迹规划[J]. 航空学报, 2016, 37 (10): 3149- 3158. |
| WANG Z , LIU L , LONG T , et al. Trajectory planning for multi- UAVs using penalty sequential convex programming[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37 (10): 3149- 3158. | |
| 9 | MENG B B. UAV path planning based on bidirectional sparse A* search algorithm[C]//Proc. of the IEEE International Conference on Intelligent Computation Technology and Automation, 2010: 1106-1109. |
| 10 |
ZHEN Z Y , CHEN Y , WEN L D , et al. An intelligent coopera- tive mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100, 105826.
doi: 10.1016/j.ast.2020.105826 |
| 11 |
QI Y Y , LIU J C , YU J Z . Dynamic modeling and hybrid fireworks algorithm-based path planning of an amphibious robot[J]. Gui-dance, Navigation and Control, 2022, 2 (1): 2250002.
doi: 10.1142/S2737480722500029 |
| 12 |
OYANA S N O , LI J , USMAN M . Three-layer multi-UAVs path planning based on ROBL-MFO[J]. Guidance, Navigation and Control, 2022, 2 (3): 2250017.
doi: 10.1142/S2737480722500170 |
| 13 |
SHANMUGAVEL M , TSOURDOS A , WHITE B , et al. Cooperative path planning of multiple UAVs using Dubins paths with clothoid arcs[J]. Control Engineering Practice, 2010, 18 (9): 1084- 1092.
doi: 10.1016/j.conengprac.2009.02.010 |
| 14 |
YANG S B , CUI T , HAO X Y , et al. Trajectory optimization for a ramjet-powered vehicle in ascent phase via the Gauss pseudospectral method[J]. Aerospace Science and Technology, 2017, 67, 88- 95.
doi: 10.1016/j.ast.2017.04.001 |
| 15 | YAN C , XIANG X J , WANG C . Towards real-time path planning through deep reinforcement learning for a UAV in dynamic environments[J]. Journal of Intelligent & Robotic Systems, 2020, 98 (12): 297- 309. |
| 16 |
ZHANG Y T , ZHANG Y M , YU Z Q . Path following control for UAV using deep reinforcement learning approach[J]. Gui-dance, Navigation and Control, 2021, 1 (1): 2150005.
doi: 10.1142/S2737480721500059 |
| 17 | 李樾, 韩维, 陈清阳, 等. 凸优化算法在有人/无人机协同系统航迹规划中的应用[J]. 宇航学报, 2020, 41 (3): 276- 286. |
| LI Y , HAN W , CHEN Q Y , et al. Application of convex optimization algorithm in trajectory planning of manned/unmanned cooperative system[J]. Journal of Astronautics, 2020, 41 (3): 276- 286. | |
| 18 |
LIU X F , SHEN Z J , LU P . Entry trajectory optimization by second-order cone programming[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (2): 227- 241.
doi: 10.2514/1.G001210 |
| 19 | LIU X F . Convergence-guaranteed trajectory planning for a class of nonlinear systems with nonconvex state constraints[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 58 (3): 2243- 2256. |
| 20 |
ZHANG G X , LIU X F . UAV collision avoidance using mixed-integer second-order cone programming[J]. Journal of Gui-dance, Control, and Dynamics, 2022, 45 (9): 1732- 1738.
doi: 10.2514/1.G006353 |
| 21 | DINH Q T, DIEHL M. Local convergence of sequential convex programming for nonconvex optimization[C]//Proc. of the Recent Advances in Optimization and its Applications in Engineering: the 14th Belgian-French-German Conference on Optimization, 2010: 93-102. |
| 22 | MESSERER F, DIEHL M. Determining the exact local convergence rate of sequential convex programming[C]//Proc. of the IEEE European Control Conference, 2020: 1280-1285. |
| 23 |
BONALLI R , LEW T , PAVONE M . Analysis of theoretical and numerical properties of sequential convex programming for continuous-time optimal control[J]. IEEE Trans.on Automatic Control, 2023, 68 (8): 4570- 4585.
doi: 10.1109/TAC.2022.3207865 |
| 24 | AUGUGLIARO F, SCHOELLIG A P, D'ANDREA R. Gene- ration of collision-free trajectories for a quadrocopter fleet: a sequential convex programming approach[C]//Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems, 2012: 1917-1922. |
| 25 |
JIANG H , AN Z , YU Y N , et al. Cooperative guidance with multiple constraints using convex optimization[J]. Aerospace Science and Technology, 2018, 79, 426- 440.
doi: 10.1016/j.ast.2018.06.001 |
| 26 |
MORGAN D , CHUNG S J , HADAEGH F Y . Model predictive control of swarms of spacecraft using sequential convex programming[J]. Journal of Guidance, Control, and Dynamics, 2014, 37 (6): 1725- 1740.
doi: 10.2514/1.G000218 |
| 27 |
MORGAN D , SUBRAMANIAN G P , CHUNG S J , et al. Swarm assignment and trajectory optimization using variable-swarm, distributed auction assignment and sequential convex programming[J]. The International Journal of Robotics Research, 2016, 35 (10): 1261- 1285.
doi: 10.1177/0278364916632065 |
| 28 | 徐广通, 邹汝平, 王祝, 等. 基于滚动规划框架的多无人机协同轨迹快速生成方法[J]. 无人系统技术, 2021, 4 (2): 33- 39. |
| XU G T , ZOU R P , WANG Z , et al. Multiple unmanned aerial vehicle rapid cooperative trajectory generation method using receding planning framework[J]. Unmanned Systems Techno-logy, 2021, 4 (2): 33- 39. | |
| 29 | 徐广通, 孟子阳, 龙腾, 等. 通信距离受限下无人机集群轨迹分布式滚动规划[J]. 中国科学: 信息科学, 2022, 52 (8): 1527- 1541. |
| XU G T , MENG Z Y , LONG T , et al. Trajectory distributed receding planning for UAV swarms subject to limited communication distance[J]. Scientia Sinica Informations, 2022, 52 (8): 1527- 1541. | |
| 30 |
SHI Y , ZHANG L H , DONG S Q . Path planning of anti-ship missile based on Voronoi diagram and binary tree algorithm[J]. Defence Science Journal, 2019, 69 (4): 369- 377.
doi: 10.14429/dsj.69.14062 |
| 31 |
WANG Z , LIU L , LONG T . Minimum-time trajectory planning for multi-unmanned-aerial-vehicle cooperation using sequential convex programming[J]. Journal of Guidance, Control, and Dynamics, 2017, 40 (11): 2976- 2982.
doi: 10.2514/1.G002349 |
| 32 |
XU G T , LONG T , WANG Z , et al. Trust-region filtered sequential convex programming for multi-UAV trajectory planning and collision avoidance[J]. ISA Transactions, 2022, 128, 664- 676.
doi: 10.1016/j.isatra.2021.11.043 |
| 33 | 邓云山, 夏元清, 孙中奇. 基于松弛序列凸优化的轮式机器人协同轨迹规划[J]. 无人系统技术, 2021, 4 (1): 24- 32. |
| DENG Y S , XIA Y Q , SUN Z Q . Coordination trajectory planning of wheeled robot using relaxation sequential convex programming[J]. Unmanned System Technology, 2021, 4 (1): 24- 32. | |
| 34 | 刘哲, 陆浩然, 郑伟, 等. 多滑翔飞行器时间协同轨迹快速规划[J]. 航空学报, 2021, 42 (11): 317- 331. |
| LIU Z , LU H R , ZHENG W , et al. Rapid time-coordination trajectory planning method for multi-glide vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (11): 317- 331. | |
| 35 | 邓雁鹏, 穆荣军, 彭娜, 等. 月面着陆动力下降段最优轨迹序列凸优化方法[J]. 宇航学报, 2022, 43 (8): 1029- 1039. |
| DENG Y P , MU R J , PENG N , et al. Sequential convex optimization method for lunar landing during power decent phase[J]. Journal of Astronautics, 2022, 43 (8): 1029- 1039. |
| [1] | Kai ZHANG, Yao TIAN. Direct symbol detection method for distributed receiving moving targets based on EM-VB [J]. Systems Engineering and Electronics, 2024, 46(4): 1422-1430. |
| [2] | Jun LIU, Ning CUI, Jiaxin XIE, Kun XING. Airborne radar air-to-air RF stealth detection parameter design based on NSGA-Ⅲ [J]. Systems Engineering and Electronics, 2024, 46(1): 97-104. |
| [3] | Ran LAI, Gang SUN, Wei ZHANG, Tao ZHANG. Space-time moving target parameter estimation algorithm based on non-convex relaxation of atomic norm [J]. Systems Engineering and Electronics, 2023, 45(9): 2761-2767. |
| [4] | Yujie LIU, Yue LI, Wei HAN, Kaikai CUI. Trajectory planning for penetration of multi-aircraft for mation based on improved convex optimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(9): 2819-2830. |
| [5] | Hong ZHANG, Yunhua WU, Shengjun ZHONG, Haibo GUO. Space target compound pointing control method based on backstepping [J]. Systems Engineering and Electronics, 2023, 45(9): 2884-2893. |
| [6] | Zhengda CUI, Mingying WEI, Yunqian LI. Cooperative trajectory planning method in later part of midcourse based on velocity estimation [J]. Systems Engineering and Electronics, 2023, 45(9): 2912-2921. |
| [7] | Ruixian HU, Zhao ZHANG, Cheng LUO. A baseline optimization method for distributive satellites system [J]. Systems Engineering and Electronics, 2023, 45(8): 2423-2437. |
| [8] | Zehong DONG, Yinghui LI, Maolong LYU, Zhe LI, Binbin PEI. Singularity-free fixed-time adaptive switching control for hypersonic flight vehicle with input constraints [J]. Systems Engineering and Electronics, 2023, 45(5): 1476-1488. |
| [9] | Wenjuan REN, Zhanpeng YANG, Guangluan XU, Kun FU. Fusion calculation model of sea moving target identity confidence [J]. Systems Engineering and Electronics, 2023, 45(4): 1082-1089. |
| [10] | Xianghai LI, Zhiwei YANG, Shun HE, Guisheng LIAO, Chaolei HAN, Yan JIANG. Method for SAR-GMTI moving target radial velocity estimation and relocation based on road network information assistance in multi-satellite formation system [J]. Systems Engineering and Electronics, 2023, 45(3): 629-637. |
| [11] | Chao SONG, Bo LI, Yunhong MA, Jingyi HUANG. 3D UAV trajectory planning based on optimized A* and MPC fusion algorithm [J]. Systems Engineering and Electronics, 2023, 45(12): 3995-4004. |
| [12] | Yemin LIU, Yongzhen LI, Datong HUANG, Shiqi XING, Xiaowei YU. Research on the method of dual-jammer system against SAR-GMTI based on integration of reconnaissance and jamming [J]. Systems Engineering and Electronics, 2023, 45(10): 3098-3107. |
| [13] | Peichen WANG, Xunliang YAN, Kuan WANG, Xiong ZHENG. Robust trajectory optimization method based on stochastic response surface and polynomial chaos [J]. Systems Engineering and Electronics, 2023, 45(10): 3226-3239. |
| [14] | Penghui JI, Dahai DAI, Shiqi XING, Dejun FENG. Dense false moving targets generation method [J]. Systems Engineering and Electronics, 2022, 44(5): 1502-1511. |
| [15] | Hanyang WANG, Liang CHEN, Hai XU, Jingbo BAI. UAV online trajectory planning based on MOEA/D-ARMS [J]. Systems Engineering and Electronics, 2022, 44(11): 3505-3514. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||