Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (7): 2346-2358.doi: 10.12305/j.issn.1001-506X.2024.07.17
• Systems Engineering • Previous Articles
Air-ground cooperative autonomous task allocation method for dynamic target search and strike
Bowen FEI, Weidong BAO, Daqian LIU, Xiaomin ZHU
- College of Systems Engineering, National University of Defense Technology, Changsha 410073, China
-
Received:2022-08-15Online:2024-06-28Published:2024-07-02 -
Contact:Weidong BAO
CLC Number:
Cite this article
Bowen FEI, Weidong BAO, Daqian LIU, Xiaomin ZHU. Air-ground cooperative autonomous task allocation method for dynamic target search and strike[J]. Systems Engineering and Electronics, 2024, 46(7): 2346-2358.
share this article

Fig.1
Air-ground cooperative organization framework"


Fig.2
Rasterized map of target region Ω"


Fig.3
Motion direction identification of target and unmanned platforms"


Fig.4
Example of spread for two pheromones"

Table 1
Basic parameters of unmanned aerial vehicles"
| 无人机编号 | 网格索引 | 载弹量 | 速度区间 | 任务编号 |
| 1 | (19, 1) | 2 | [0, 30] | [1, 2, 3] |
| 2 | (82, 1) | 2 | [0, 30] | [1, 2, 3] |
| 3 | (19, 82) | 2 | [0, 30] | [1, 2, 3] |
| 4 | (1, 19) | 2 | [0, 30] | [1, 2, 3] |
| 5 | (40, 1) | 2 | [0, 30] | [1, 2, 3] |
| 6 | (82, 19) | 2 | [0, 30] | [1, 2, 3] |
| 7 | (40, 82) | 2 | [0, 30] | [1, 2, 3] |
| 8 | (1, 40) | 2 | [0, 30] | [1, 2, 3] |
Table 2
Basic parameters of unmanned ground vehicles"
| 无人车编号 | 网格索引 | 载弹量 | 速度区间 | 任务编号 |
| 1 | (61, 1) | 2 | [0, 40] | [1, 2, 3] |
| 2 | (82, 40) | 2 | [0, 40] | [1, 2, 3] |
| 3 | (61, 82) | 2 | [0, 40] | [1, 2, 3] |
| 4 | (1, 61) | 2 | [0, 40] | [1, 2, 3] |
| 5 | (79, 1) | 2 | [0, 40] | [1, 2, 3] |
| 6 | (82, 61) | 2 | [0, 40] | [1, 2, 3] |
| 7 | (79, 82) | 2 | [0, 40] | [1, 2, 3] |
| 8 | (1, 79) | 2 | [0, 40] | [1, 2, 3] |
Table 3
Initial state information of targets"
| 编号 | 网格索引 | 运动类型 | 需打击量 | 运动状态 |
| T1 | (61, 1) | 1 | 2 | [0, 1] |
| T2 | (82, 40) | 2 | 3 | [0, 1] |
| T3 | (61, 82) | 3 | 4 | [0, 1] |
| T4 | (1, 61) | 1 | 2 | [0, 1] |
| T5 | (79, 1) | 2 | 3 | [0, 1] |
| T6 | (82, 61) | 3 | 4 | [0, 1] |
| T7 | (79, 82) | 1 | 2 | [0, 1] |
| T8 | (1, 79) | 2 | 3 | [0, 1] |
| T9 | (61, 61) | 3 | 4 | [0, 1] |

Fig.5
Three-dimensional travel routes of air-ground platforms"


Fig.6
Two-dimensional travel routes of unmanned aerial vehicles"


Fig.7
Two-dimensional travel routes of unmanned ground vehicles"


Fig.8
Comparison of target discovery quantity and regional coverage ratio rate"
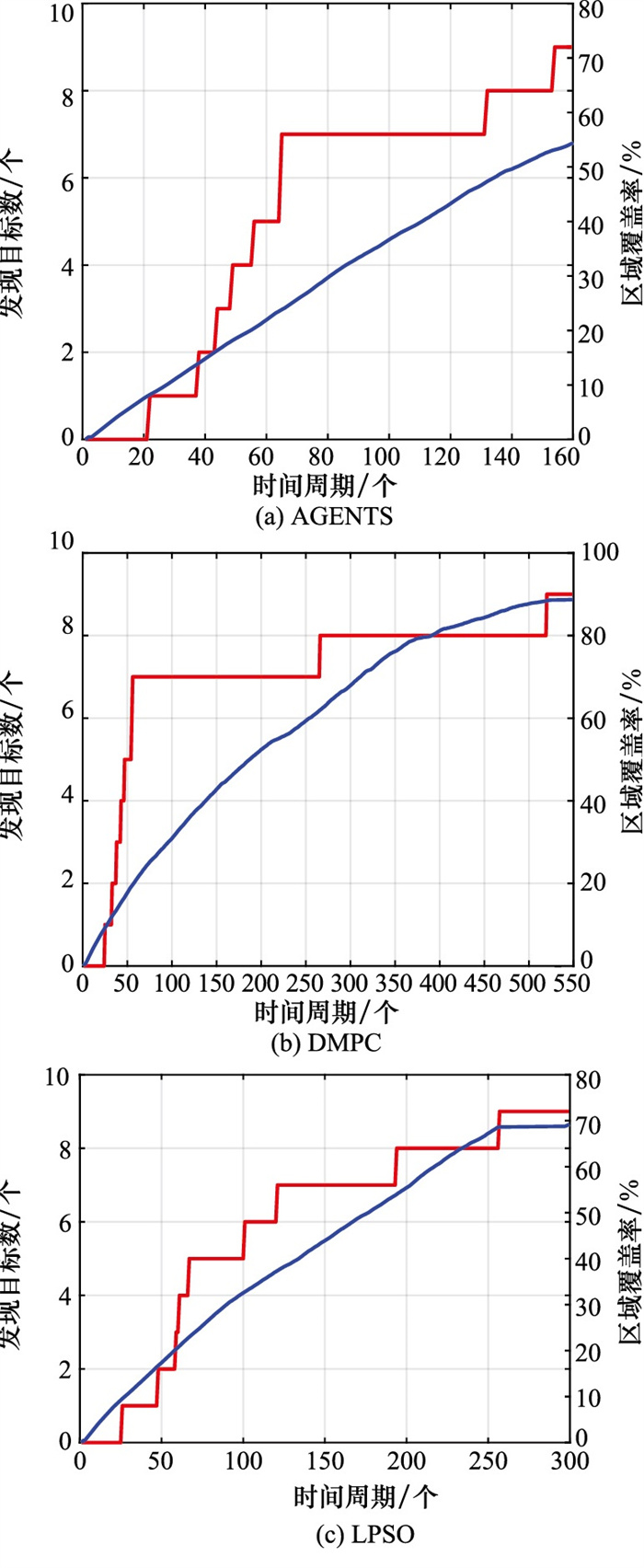
Table 4
Quantitative comparison under different cycles"
| 方法 | 时间周期 | 目标发现数 | 目标打击数 | 区域覆盖率/% | 运行时间/s |
| AGENTS | 100 | 7 | 6 | 37.2 | 77.9 |
| 200 | 9 | 9 | 61.2 | 149.2 | |
| 300 | 9 | 9 | 72.3 | 191.6 | |
| DMPC | 100 | 6 | 4 | 31.7 | 76.4 |
| 200 | 7 | 6 | 52.4 | 165.1 | |
| 300 | 8 | 6 | 70.1 | 206.6 | |
| LPSO | 100 | 4 | 4 | 32.6 | 85.6 |
| 200 | 7 | 6 | 55.4 | 175.4 | |
| 300 | 9 | 9 | 70.9 | 236.9 |

Fig.9
Results of regional coverage rate and runtime for different number of platforms"


Fig.10
Results of regional coverage rate and runtime for different ammunition loads"

| 1 |
SANTOSO F , GARRATT M , ANAVATTI S . State-of-the-art integrated guidance and control systems in unmanned vehicles: a review[J]. IEEE Systems Journal, 2021, 15 (3): 3312- 3323.
doi: 10.1109/JSYST.2020.3007428 |
| 2 | 张婷婷, 蓝羽石, 宋爱国. 无人集群系统自主协同技术综述[J]. 指挥与控制学报, 2021, 7 (2): 127- 136. |
| ZHANG T T , LAN Y S , SONG A G . An overview of autonomous collaboration technologies for unmanned swarm systems[J]. Journal of Command and Control, 2021, 7 (2): 127- 136. | |
| 3 |
LIU D Q , BAO W D , ZHU X M , et al. Cooperative path optimization for multiple UAVs surveillance in uncertain environment[J]. IEEE Internet of Things Journal, 2022, 9 (13): 10676- 10692.
doi: 10.1109/JIOT.2021.3125784 |
| 4 |
ZHU L H , WANG Y , WU Z Q . An adaptive priority allocation for formation UAVs in complex context[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 57 (2): 1002- 1015.
doi: 10.1109/TAES.2020.3034016 |
| 5 | 余婧, 雍恩米, 陈汉洋, 等. 面向多无人机协同对地攻击的双层任务规划方法[J]. 系统工程与电子技术, 2022, 44 (9): 2849- 2857. |
| YU J , YONG E M , CHEN H Y , et al. Bi-level mission planning framework for multi-cooperative UAV air-to-ground attack[J]. Systems Engineering and Electronics, 2022, 44 (9): 2849- 2857. | |
| 6 |
YAO W R , QI N M , WAN N , et al. An iterative strategy for task assignment and path planning of distributed multiple unmanned aerial vehicles[J]. Aerospace Science and Technology, 2019, 86, 455- 464.
doi: 10.1016/j.ast.2019.01.061 |
| 7 | YE F , CHEN J , TIAN Y , et al. Cooperative multiple task assignment of heterogeneous UAVs using a modified genetic algorithm with multi-type-gene chromosome encoding strategy[J]. Journal of Intelligent & Robotic Systems, 2020, 100 (2): 615- 627. |
| 8 | CHEN X , LIU Y T , YIN L Y , et al. Cooperative task assignment and track planning for multi-UAV attack mobile targets[J]. Journal of Intelligent & Robotic Systems, 2020, 100 (3): 1383- 1400. |
| 9 |
WEI C Y , JI Z , CAI B L . Particle swarm optimization for cooperative multi-robot task allocation: a multi-objective approach[J]. IEEE Robotics and Automation Letters, 2020, 5 (2): 2530- 2537.
doi: 10.1109/LRA.2020.2972894 |
| 10 | CHEN C , BAO W D , MEN T , et al. NECTAR-an agent-based dynamic task allocation algorithm in the UAV swarm[J]. Complexity, 2020, 6747985. |
| 11 |
DUAN H B , ZHAO J X , DENG Y M , et al. Dynamic discrete pigeon-inspired optimization for multi-UAV cooperative search-attack mission planning[J]. IEEE Trans.on Aerospace and Electronic Systems, 2021, 57 (1): 706- 720.
doi: 10.1109/TAES.2020.3029624 |
| 12 |
李翰, 张洪海, 张连东, 等. 城市区域多物流无人机协同任务分配[J]. 系统工程与电子技术, 2021, 43 (12): 3594- 3602.
doi: 10.12305/j.issn.1001-506X.2021.12.22 |
|
LI H , ZHANG H H , ZHANG L D , et al. Multiple logistics unmanned aerial vehicle collaborative task allocation in urban areas[J]. Systems Engineering and Electronics, 2021, 43 (12): 3594- 3602.
doi: 10.12305/j.issn.1001-506X.2021.12.22 |
|
| 13 |
LUO Q N , DUAN H B . An improved artificial physics approach to multiple UAVs/UGVs heterogeneous coordination[J]. Science China Technological Sciences, 2013, 56 (10): 2473- 2479.
doi: 10.1007/s11431-013-5314-2 |
| 14 | NI J J , TANG M , CHEN Y N , et al. An improved cooperative control method for hybrid unmanned aerial-ground system in multitasks[J]. International Journal of Aerospace Engineering, 2020, 2020, 1- 14. |
| 15 |
NI J J , WANG X T , TANG M , et al. An improved real-time path planning method based on dragonfly algorithm for heterogeneous multi-robot system[J]. IEEE Access, 2020, 8, 140558- 140568.
doi: 10.1109/ACCESS.2020.3012886 |
| 16 |
WU Y , WU S B , HU X T . Cooperative path planning of UAVs & UGVs for a persistent surveillance task in urban environments[J]. IEEE Internet of Things Journal, 2021, 8 (6): 4906- 4919.
doi: 10.1109/JIOT.2020.3030240 |
| 17 | 梁星星, 修保新, 范长俊, 等. 面向海上移动目标的空天协同连续观测模型[J]. 系统工程理论与实践, 2018, 38 (1): 229- 240. |
| LIANG X X , XIU B X , FAN C J , et al. The aerospace coope-rative planning model for maritime moving target continuation observation[J]. Systems Engineering-Theory & Practice, 2018, 38 (1): 229- 240. | |
| 18 |
LI J Q , SUN T , HUANG X P , et al. A memetic path planning algorithm for unmanned air/ground vehicle cooperative detection systems[J]. IEEE Trans.on Automation Science and Engineering, 2022, 19 (4): 2724- 2737.
doi: 10.1109/TASE.2021.3061870 |
| 19 | 李夏苗, 廖文昆, 伍国华, 等. 基于两阶段迭代优化的空天观测资源协同任务规划方法[J]. 控制与决策, 2021, 36 (5): 1147- 1156. |
| LI X M , LIAO W K , WU G H , et al. A two-stage iterative optimazation method for the coordinated task planning of space and air observation resources[J]. Control and Decision, 2021, 36 (5): 1147- 1156. | |
| 20 | MEN T, LIU D Q, ZHU X M, et al. Cooperative target search for UAVs in urban environment[C]//Proc. of the IEEE International Conference on Smart City and Informatization, 2021: 8-14. |
| 21 |
YAO P , WANG H L , JI H X . Multi-UAVs tracking target in urban environment by model predictive control and improved grey wolf optimizer[J]. Aerospace Science and Technology, 2016, 55, 131- 143.
doi: 10.1016/j.ast.2016.05.016 |
| 22 |
JUANG C F , YEH Y T . Multi-objective evolution of biped robot gaits using advanced continuous ant-colony optimized recurrent neural networks[J]. IEEE Trans.on Cybernetics, 2018, 48 (6): 1910- 1922.
doi: 10.1109/TCYB.2017.2718037 |
| 23 |
LIU Z , GAO X G , FU X W . A cooperative search and cove-rage algorithm with controllable revisit and connectivity maintenance for multiple unmanned aerial vehicles[J]. Sensors, 2018, 18 (5): 1472.
doi: 10.3390/s18051472 |
| 24 | 肖东, 江驹, 周俊, 等. 通信受限下多无人机协同运动目标搜索[J]. 哈尔滨工程大学学报, 2018, 39 (11): 1823- 1829. |
| XIAO D , JIANG J , ZHOU J , et al. Multi-UAV cooperation search for moving targets under limited communication[J]. Journal of Harbin Engineering University, 2018, 39 (11): 1823- 1829. | |
| 25 | 基于A星算法求解路径规划问题[EB/OL]. [2021-11-25]. https://blog.csdn.net/qq_59747472/article/details/121547551. |
| Solving Path Planning Problems Based on A-Star Algorithm[EB/OL]. [2021-11-25]. https://blog.csdn.net/qq_59747472/article/details/121547551. | |
| 26 | A星算法(基于matlab)[EB/OL]. [2019-04-10]. http://blog.csdn.net/lmq_zzz/article/details/88999480. |
| A-Star Algorithm (Based on matlab)[EB/OL]. [2019-04-10]. http://blog.csdn.net/lmq_zzz/article/details/88999480. | |
| 27 | RAMIREZ-ATENCIA C , BELLO-ORGAZ G , R-MORENO M , et al. Solving complex multi-UAV mission planning problems using multi-objective genetic algorithms[J]. Soft Computing, 2017, 21, 4883- 4900. |
| 28 | ROBIN C , LACROIX S . Multi-robot target detection and tracking: taxonomy and survey[J]. Autonomous Robots, 2016, 40 (4): 729- 760. |
| 29 | FEI B W , BAO W D , ZHU X M , et al. Autonomous cooperative search model for multi-UAV with limited communication network[J]. IEEE Internet of Things Journal, 2022, 9 (19): 19346- 19361. |
| 30 | SAADAOUI H, BOUANANI F E. Information sharing based on local PSO for UAVs cooperative search of unmoved targets[C]//Proc. of the International Conference on Advanced Communication Technologies and Networking, 2018. |
| [1] | Jie LI, Yuejin TAN. Operation loop recommendation method based on integrated improved ant colony algorithm [J]. Systems Engineering and Electronics, 2024, 46(6): 2002-2012. |
| [2] | Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755. |
| [3] | Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm [J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. |
| [4] | Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG. Research on UAV path planning method based on the multi-precision planning windows [J]. Systems Engineering and Electronics, 2024, 46(5): 1767-1776. |
| [5] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [6] | Guixiang ZHAO, Jian ZHOU, Yunmiao LI, Chenxu WANG. Improved bi-directional rapidly-exploring random tree path planning for USV [J]. Systems Engineering and Electronics, 2024, 46(4): 1364-1371. |
| [7] | Yujie LIU, Yue LI, Wei HAN, Kaikai CUI. Trajectory planning for penetration of multi-aircraft for mation based on improved convex optimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(9): 2819-2830. |
| [8] | Duo ZHENG, Yu HAN, Tianyu LU, Zhichen CHU. Multi aircraft cooperative guidance technology considering collision avoidance constraint task allocation [J]. Systems Engineering and Electronics, 2023, 45(9): 2873-2883. |
| [9] | Zihao CHEN, Juan LI, Chang LIU, Jie LI, Xiaoyu LIU. Task planning method for coordinated attacks on ground targets under time constraints [J]. Systems Engineering and Electronics, 2023, 45(8): 2353-2360. |
| [10] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| [11] | Liyao WU, Xichao SU, Lei WANG, Zishuang PAN. Research of formation rendezvous control for manned/unmanned aerial vehicles formation [J]. Systems Engineering and Electronics, 2023, 45(7): 2192-2202. |
| [12] | Hanyu QIAN, Xiaoman TIAN, Bing XIAO, Lu CAO, Rui WANG, Xiwei WU. Balanced task allocation method for distributed satellite swarm game [J]. Systems Engineering and Electronics, 2023, 45(6): 1797-1804. |
| [13] | Yao LIU, Yangsheng XIA, Jianmai SHI, Chao CHEN, Jincai HUANG. Path planning method for multi-area coverage by cooperated ground vehicle multi-drone [J]. Systems Engineering and Electronics, 2023, 45(5): 1380-1390. |
| [14] | Qinglu WANG, Fengguo WU, Chengchen ZHENG, Hui LI. UAV path planning based on optimized artificial potential field method [J]. Systems Engineering and Electronics, 2023, 45(5): 1461-1468. |
| [15] | Wei HAN, Zixuan LIU, Xichao SU, Kaikai CUI, Jie LIU. Deck path planning algorithm of carrier-based aircraft based on heuristic and optimal control [J]. Systems Engineering and Electronics, 2023, 45(4): 1098-1110. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||