Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (5): 1346-1353.doi: 10.12305/j.issn.1001-506X.2021.05.23
• Guidance, Navigation and Control • Previous Articles Next Articles
Robust filtering algorithm based on three discriminant domain and least squares fitting
Baojie CAI*( ), Lei SHAO()
), Lei SHAO()
- Air and Missile Defence College, Air Force Engineering University, Xi'an 710051, China
-
Received:2020-07-13Online:2021-05-01Published:2021-04-27 -
Contact:Baojie CAI E-mail:18332729660@163.com;shaolei_zj@163.com
CLC Number:
Cite this article
Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting[J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353.
share this article

Fig.1
Flow chart of classical Kalman filtering"

Table 1
Significance levels and thresholds"
| 显著性水平α | 阈值T(1) |
| 0.975 | 0.001 |
| 0.950 | 0.004 |
| 0.900 | 0.016 |
| 0.750 | 0.102 |
| 0.250 | 1.323 |
| 0.100 | 2.706 |
| 0.050 | 3.841 |
| 0.025 | 5.024 |
| 0.010 | 6.635 |
| 0.005 | 7.879 |

Fig.2
Chi-square detection distribution map when error is 5 m"
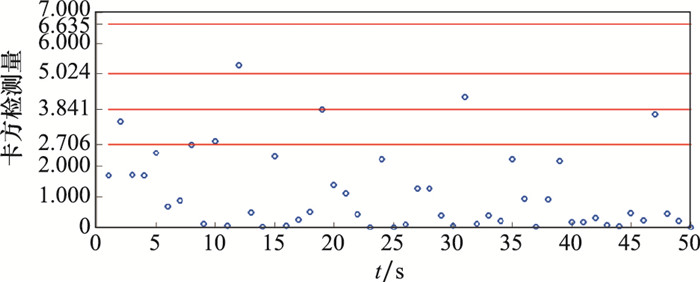

Fig.3
Chi-square detection distribution map when error is 10 m"
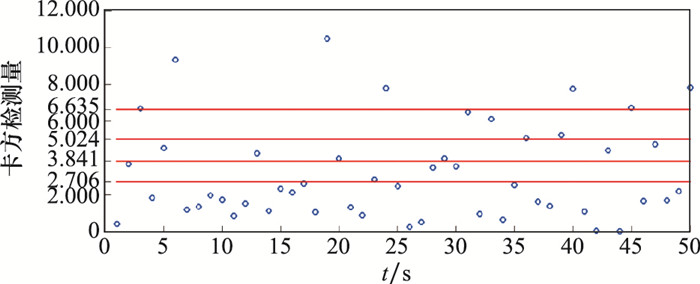
Fig.4
Chi-square detection distribution map when error is 15 m"
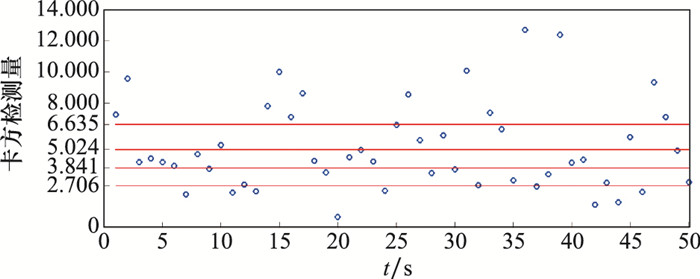
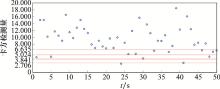
Fig.5
Chi-square detection distribution map when error is 20 m"
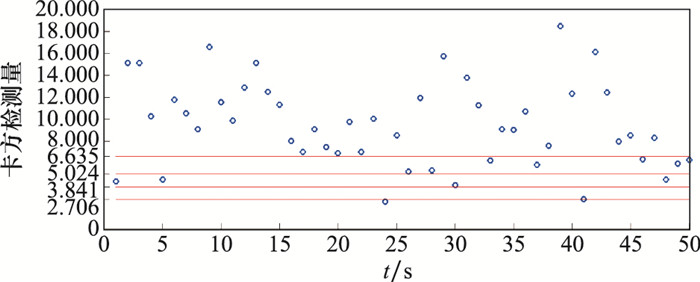
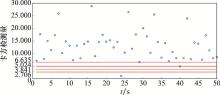
Fig.6
Chi-square detection distribution map when error is 25 m"
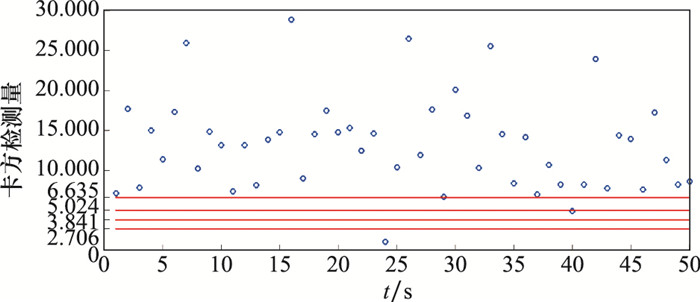
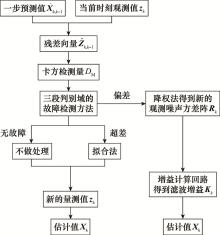
Fig.7
Flow chart of three discriminant domain and least square fitting robust filtering algorithm"

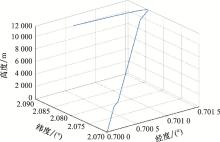
Fig.8
Flight path of simulated aircraft"

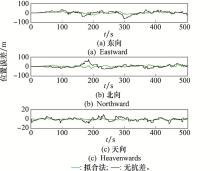
Fig.9
Position error of fitting method robust filter and non-robust filter"

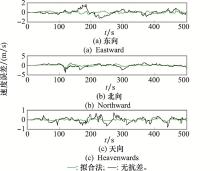
Fig.10
Velocity error of fitting method robust filter and non-robust filter"
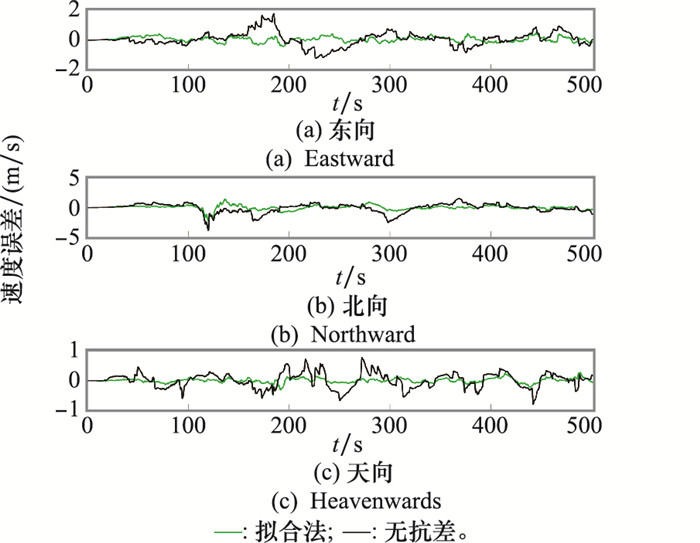
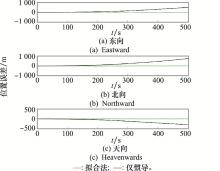
Fig.11
Position error of fitting method robust filtering and only inertial navigation"

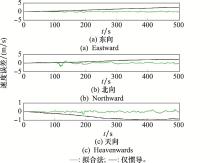
Fig.12
Velocity error of fitting method robust filtering and only inertial navigation"
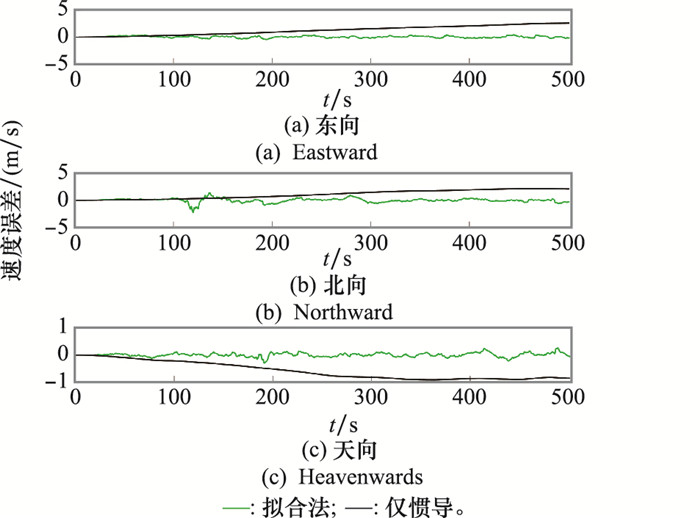
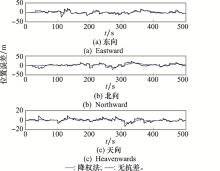
Fig.13
Comparison of position error between weight reduction method and non-robust filter"


Fig.14
Comparison of velocity error between weight reduction method and non-robust filter"
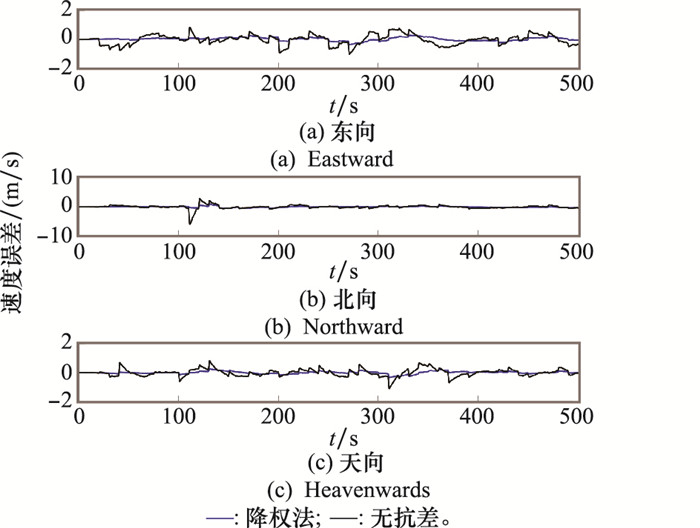
Table 2
Navigation error range when the measurement error is 20 m"
| 抗差滤波 | 无抗差滤波 | |
| 东向位置误差/m | -11.8~6.06 | -25.8~32.6 |
| 北向位置误差/m | -6.64~7.54 | -20.5~34.9 |
| 天向位置误差/m | -2.62~2.57 | -7.9~13.9 |
| 东向速度误/(m/s) | -0.3~0.3 | -1.16~1.11 |
| 东向速度误差/(m/s) | -1.3~1.2 | -1.8~5.2 |
| 东向速度误差/(m/s) | -0.2~0.3 | -0.8~1.11 |
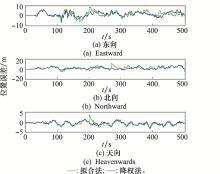
Fig.15
Position error of single-time fault fitting method and weight reduction method"
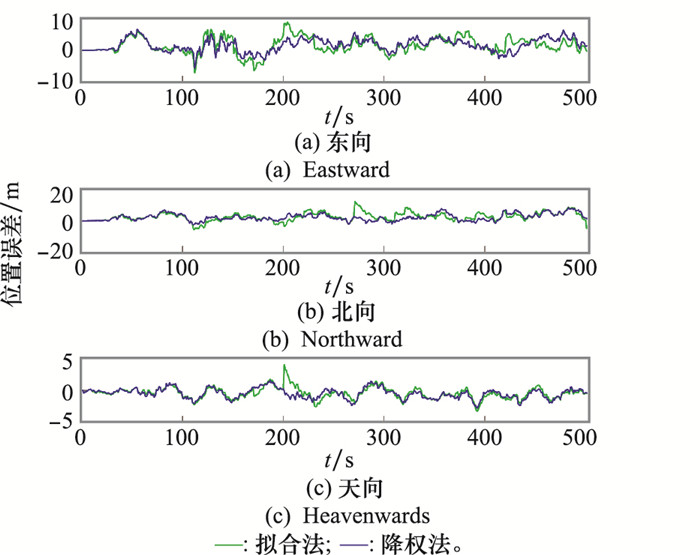
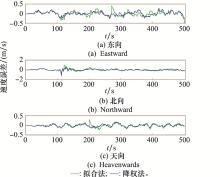
Fig.16
Velocity error of single-time fault fitting method and weight reduction method"
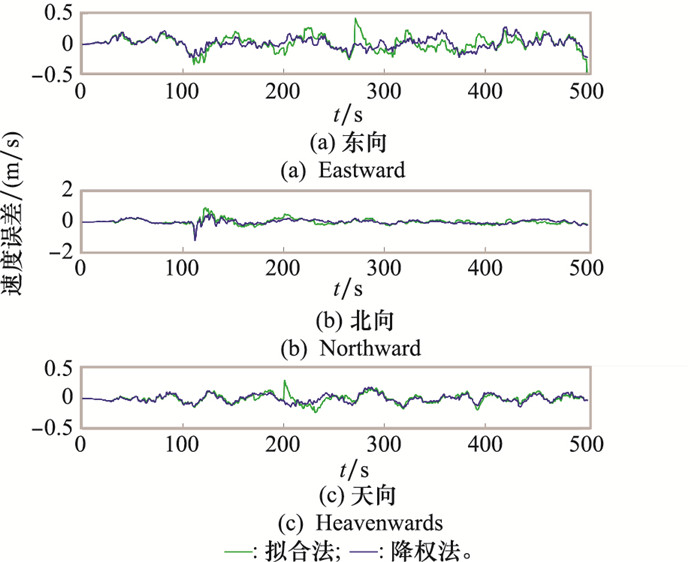
Table 3
Navigation error range when the measurement error is 100 m"
| 降权法 | 拟合法 | |
| 东向位置误差/m | -6.86~5.41 | -8.11~12.09 |
| 北向位置误差/m | -4.89~9.74 | -8.26~8.58 |
| 天向位置误差/m | -2.72~6.52 | -3.65~2.37 |
| 东向速度误差/(m/s) | -0.30~0.25 | -0.38~0.41 |
| 东向速度误差/(m/s) | -0.63~0.68 | -0.67~1.06 |
| 天向速度误差/(m/s) | -0.15~0.11 | -0.17~1.18 |
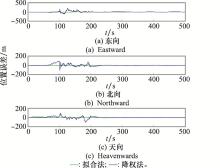
Fig.17
Position error of consecutive time fault fitting method and weight reduction method"
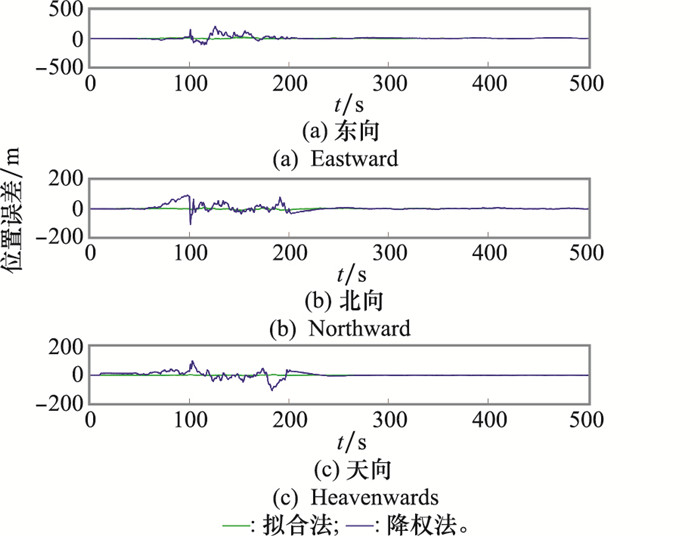
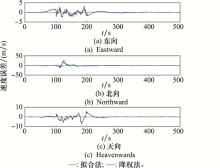
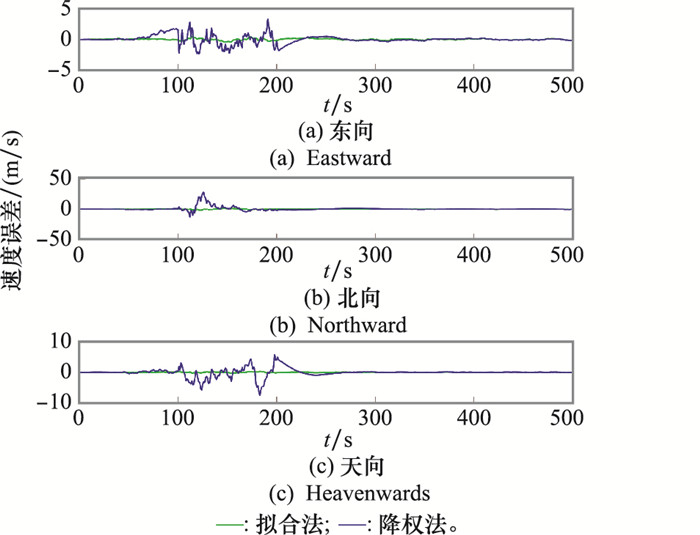
Fig.18
Velocity error of consecutive time fault fitting method and weight reduction method"
| 1 |
ABOLHASANI M , RAHMANI M . Robust Kalman filtering for discrete-time systems with stochastic uncertain time-varying parameters[J]. Electronics Letters, 2017, 53 (3): 146- 148.
doi: 10.1049/el.2016.2520 |
| 2 |
BHATTIUI , OCHIENG W Y , FENG S J . Performance of rate detector algorithm for an integrated GPS/INS system in the presence of slowly growing error[J]. GPS Solutions, 2012, 16 (3): 293- 301.
doi: 10.1007/s10291-011-0231-y |
| 3 | KRARUP T , JUHL J , KUBIK K . Gotterdammerung over least squares adjustment[J]. Int Arch Photogramm, 1980, 23 (B3): 369- 378. |
| 4 |
CASPARY W , BORUTTA H . Robust estimation in deformation models[J]. Survey Review, 1987, 29 (223): 29- 45.
doi: 10.1179/sre.1987.29.223.29 |
| 5 | 付心如. INS/GNSS组合导航抗差自适应Kalman滤波方法研究[D]. 阜新: 辽宁工程技术大学, 2017. |
| FU X R. The robust adaptive kalman filter research of INS/GNSS integrated navigation[D]. Fuxin: Liaoning Technical University, 2017. | |
| 6 | 徐波. GNSS/INS组合导航滤波算法研究[D]. 徐州: 中国矿业大学, 2016. |
| XU B. GNSS/INS integrated navigation filter method research[D]. Xuzhou: China University of Mining and Technology, 2016. | |
| 7 |
GAO X L , LUO H , NING B K , et al. RL-AKF: an adaptive Kalman filter navigation algorithm based on reinforcement learning for ground vehicles[J]. Remote Sensing, 2020, 12 (11): 1704.
doi: 10.3390/rs12111704 |
| 8 |
WANG J L , ZHANG C X , JIA Q X , et al. Suboptimal adaptive Kalman filtering based on the proportional control of prior error covariance[J]. ISA Transactions, 2020, 100, 145- 154.
doi: 10.1016/j.isatra.2019.12.008 |
| 9 | LIU Y , FAN X , LYU C , et al. An innovative information fusion method with adaptive Kalman filter for integrated INS/GPS navigation of autonomous vehicles[J]. Mechanical Systems and Signal Processing, 2008, 100, 605- 616. |
| 10 | 张建, 喻国荣, 潘树国, 等. 基于卡方检验的GNSS观测值部分粗差抗差滤波算法[J]. 仪器仪表学报, 2019, 40 (8): 102- 109. |
| ZHANG J , YU G R , PAN S G , et al. Partial gross error robust filtering algorithm for GNSS observations based on chi-square test[J]. Chinese Journal of Scientific Instrument, 2019, 40 (8): 102- 109. | |
| 11 | 许长辉, 高井祥, 王坚. GNSS/INS组合系统的抗差卡尔曼滤波[J]. 中国矿业大学学报, 2010, 39 (5): 773- 778. |
| XU C H , GAO J X , WANG J . Robust Kalman filtering of GNSS/INS integrated system[J]. Journal of China University of Mining & Technology, 2010, 39 (5): 773- 778. | |
| 12 | QIAO G, LI Z, SUN Z, et al. Kalman filter restraining outliers for short baseline system[C]//Proc. of Intelligent Control and Automation, 2012: 322-325. |
| 13 | 秦永元. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学出版社, 2017. |
| QIN Y Y . The theory of Kalman filter and integrated navigation[M]. Xi'an: Northwestern Polytechnical University Press, 2017. | |
| 14 |
ZHANG D , DAI H , HU Q , et al. Robust adaptive UKF based on SVR for inertial based integrated navigation[J]. Defence Technology, 2020, 16, 846- 855.
doi: 10.1016/j.dt.2019.10.012 |
| 15 | 赵琳, 王小旭, 丁继成, 等. 组合导航系统非线性滤波算法综述[J]. 中国惯性技术学报, 2009, 17 (01): 46- 52, 58. |
| ZHAO L , WANG X X , DING J C , et al. Overview of nonlinear filter methods applied in integrated navigation system[J]. Journal of Chinese Inertial Technology, 2009, 17 (01): 46- 52, 58. | |
| 16 |
CHEN J , SHU B Z . A novel adaptively-robust strategy based on the mahalanobis distance for GPS/INS integrated navigation systems[J]. Sensors, 2018, 18 (3): 695- 699.
doi: 10.3390/s18030695 |
| 17 |
YAO Y Q , XU X S , ZHU C C . A hybrid algorithm for GPS/INS integration during GPS outages[J]. Measurement, 2017, 103, 42- 51.
doi: 10.1016/j.measurement.2017.01.053 |
| 18 |
XU X , XU X S , ZHANG T , et al. A Kalman filter for SINS self-alignment based on vector observation[J]. Sensors, 2017, 17 (2): 264- 282.
doi: 10.3390/s17020264 |
| 19 | GROVE P D . Principles of GNSS, inertial, and multisensor integrated navigation systems[M]. London: Artech House, 2008. |
| 20 | SHIN E H. Estimation techniques for low-cost inertial navigation[D]. Calgary: The university of Calgary, 2003. |
| 21 | 王新龙. SINS/GPS组合导航技术[M]. 北京: 北京航空航天大学出版社, 2015. |
| WANG X L . SINS/GPS integrated navigation technology[M]. Beijing: Beijing University of Aeronautics and Astronautics press, 2015. | |
| 22 |
GERASIMOS G. RIGATOS . Nonlinear Kalman filters and particle filters for integrated navigation of unmanned aerial vehicles[J]. Robotics and Autonomous Systems, 2012, 60 (7): 978- 995.
doi: 10.1016/j.robot.2012.03.001 |
| 23 | MAHALANOBIS P C . On the generalized distance in statistics[J]. Proceedings of the National Institute of Sciences of India, 1936, 2, 49- 55. |
| 24 | SIMON PARKINSON , SAAD KHAN . Identifying irregularities in security event logs through an object-based chi-squared test of independence[J]. Journal of Information Security & Applications, 2018, 40, 52- 62. |
| 25 |
FENG K , LI J , ZHANG X , et al. An improved strong tracking cubature Kalman filter for GPS/INS integrated navigation systems[J]. Sensors, 2018, 18 (6): 1919.
doi: 10.3390/s18061919 |
| 26 | ZHAO X , WANG S C , LIAO S Y , et al. An ultra-tightly coupled tracking method based on robust adaptive cubature Kalman filter[J]. Acta Automatica Sinica, 2014, 40 (11): 2530- 2540. |
| 27 | 苗岳旺, 周巍, 田亮, 等. 基于新息χ2检测的扩展卡尔曼滤波及其应用[J]. 武汉大学学报·信息科学版, 2008, 41 (2): 269- 273. |
| MIAO Y W , ZHOU W , TIAN L , et al. Extended robust Kalman filter based on innovation chi-square test algorithm and its application[J]. Geomatics and Information Science of Wuhan University, 2008, 41 (2): 269- 273. | |
| 28 |
CARCINER J M , KHIAR Y , PENA J M . Central orderings for the Newton interpolation formula[J]. BIT Numerical Mathematics, 2019, 59 (2): 371- 386.
doi: 10.1007/s10543-018-00743-2 |
| 29 |
HE F W , HUA X . Quantum algorithm for total least squares data fitting[J]. Physics Letters A, 2019, 383 (19): 2235- 2240.
doi: 10.1016/j.physleta.2019.04.037 |
| 30 | GONG X L , LIU H J , FANG J C , et al. Multi-node transfer alignment based on mechanics modeling for airborne DPOS[J]. IEEE Sensors Journal, 2017, 18 (2): 669- 679. |
| [1] | Yingying JIANG, Shuguo PAN, Fei YE, Wang GAO, Chun MA, Hao WANG. Approach for detection of slowly growing fault based on robust estimation and improved AIME [J]. Systems Engineering and Electronics, 2022, 44(9): 2894-2902. |
| [2] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [3] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [4] | Shuguang SUN, Qixin WEN. Aircraft height optimization algorithm of integrated navigation in terminal area based on height anomaly compensation [J]. Systems Engineering and Electronics, 2021, 43(9): 2612-2619. |
| [5] | Zhe WEN, Hongwei BIAN, Heng MA, Tao ZANG. Simulation test method of inertial navigation polar performance at middle and low latitudes [J]. Systems Engineering and Electronics, 2021, 43(9): 2620-2627. |
| [6] | Renjie ZHAO, Baiqing HU, Xu LYU, Jiayu TIAN. Filtering algorithm of UKF integrated navigation based on dual-Euler angles [J]. Systems Engineering and Electronics, 2021, 43(7): 1912-1920. |
| [7] | Jing SU, Huafeng HE, Yaomin HE, Yifan WANG, Xiaofei HAN. Filtering algorithm of missile-borne SINS/SAR integrated navigation considering SAR measurement characteristics [J]. Systems Engineering and Electronics, 2021, 43(4): 1044-1049. |
| [8] | Xu LYU, Baiqing HU, Yongbin DAI, Renjie ZHAO. Application of USQUE based on PSO in attitude estimation of integrated navigation [J]. Systems Engineering and Electronics, 2020, 42(6): 1366-1371. |
| [9] | Kaixin LUO, Meiping WU, Ying FAN. Robust adaptive filtering based on maximum entropy method and its application [J]. Systems Engineering and Electronics, 2020, 42(3): 667-673. |
| [10] | Kanghui HE, Chaoyang DONG. Orthogonal transformed fifth-order cubature Kalman filter for navigation [J]. Systems Engineering and Electronics, 2020, 42(3): 680-685. |
| [11] | LIU Songtao, WANG Zhan, WEI Baoyan. Image tracking system for conventional moving target and abrupt maneuvering target [J]. Systems Engineering and Electronics, 2019, 41(8): 1692-1698. |
| [12] | ZHANG Chuang, GUO Chen, ZHANG Daheng. Adaptive iterative particle filter and its application for ship integrated navigation [J]. Systems Engineering and Electronics, 2019, 41(4): 883-888. |
| [13] | ZOU Zisheng, CONG Shuang, SHANG Weiwei, CHEN Ding. State filtering and controller design for fine tracking system in quantum positioning [J]. Systems Engineering and Electronics, 2019, 41(3): 601-610. |
| [14] | GE Baoshuang, ZHANG Hai, JIN Yanqiong. Redundant measurement based method for online mitigation of GNSS multipath errors [J]. Systems Engineering and Electronics, 2019, 41(11): 2581-2587. |
| [15] | CHENG Jianhua, FAN Shilong, LI Liang, DONG Ping. Time synchronization technology of integrated navigation based on measurement correction [J]. Systems Engineering and Electronics, 2019, 41(10): 2328-2333. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||