Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (12): 3694-3702.doi: 10.12305/j.issn.1001-506X.2021.12.33
• Communications and Networks • Previous Articles Next Articles
Path planning algorithm combining A* with DWA
Wengang LI1,2, Liujiang WANG1,2,*, Dexiang FANG1,2, Yuwei LI1,2, Jun Huang3
- 1. School of Communication Engineering, Xidian University, Xi'an 710071, China
2. State Key Laboratory of Integrated Services Networks, Xidian University, Xi'an 710071, China
3. College of Electronic Engineering, National University of Defense Technology, Hefei 230037, China
-
Received:2020-09-01Online:2021-11-24Published:2021-11-30 -
Contact:Liujiang WANG
CLC Number:
Cite this article
Wengang LI, Liujiang WANG, Dexiang FANG, Yuwei LI, Jun Huang. Path planning algorithm combining A* with DWA[J]. Systems Engineering and Electronics, 2021, 43(12): 3694-3702.
share this article

Fig.1
Schematic diagram of grid method"


Fig.2
Grid granularity"


Fig.3
A* algorithm flow chart"


Fig.4
Storage of heap structures"
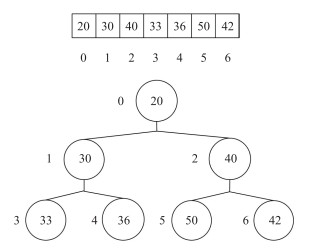

Fig.5
A* algorithm simulation diagram"
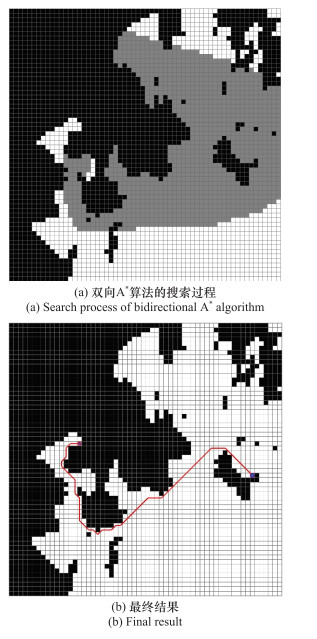

Fig.6
Bidirectional A* algorithm simulation diagram"

Table 1
Comparison of simulation results between A* algorithm and bidirectional A* algorithm"
| 路径 | 算法 | 路径长度 | 运行时间/s | OPEN表搜索节点数 | CLOSE表搜索节点数 |
| 1 | A* | 134.04 | 10.95 | 132 | 1 404 |
| 双向A* | 134.20 | 6.91 | 70 | 1 143 | |
| 2 | A* | 55.25 | 4.91 | 124 | 550 |
| 双向A* | 56.08 | 2.12 | 84 | 317 | |
| 3 | A* | 150.34 | 14.25 | 160 | 2 040 |
| 双向A* | 151.02 | 10.30 | 112 | 1 623 |

Fig.7
Schematic diagram of DWA"


Fig.8
Simulation diagram of DWA not affected by dynamic obstacle"


Fig.9
Simulation diagram of DWA affected by dynamic obstacle"


Fig.10
DWA falling into local minimum"
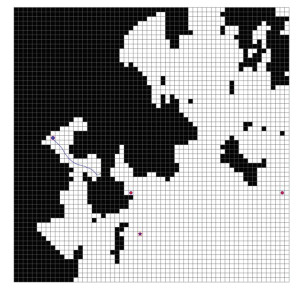

Fig.11
Hybrid path planning system"
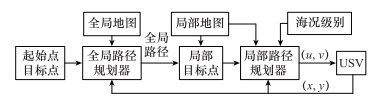
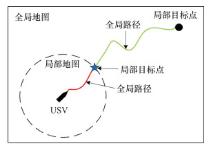
Fig.12
Local target point diagram"


Fig.13
Hybrid path planning algorithm simulation"
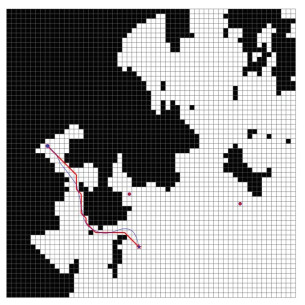
Table 2
Comparison of simulation results between hybrid algorithm and A* algorithm"
| 路径 | 算法 | 路径长度 | 路径拐点 |
| 1 | 改进A*算法 | 50 | 10 |
| 混合路径规划算法 | 39 | 4 | |
| 2 | 改进A*算法 | 25 | 8 |
| 混合路径规划算法 | 17 | 3 |
| 1 | 张伟, 廖煜雷, 姜峰, 等. 无人水面艇技术发展回顾与趋势分析[J]. 无人系统技术, 2019, 2 (6): 1- 9. |
| ZHANG W , LIAO Y L , JIANG F , et al. Technology development review and trend analysis of unmanned surface craft[J]. Unmanned System Technology, 2019, 2 (6): 1- 9. | |
| 2 |
LIU Z X , ZHANG Y M , YU X , et al. Unmanned surface vehicles: an overview of developments and challenges[J]. Annual Review in Control, 2016, 41, 71- 93.
doi: 10.1016/j.arcontrol.2016.04.018 |
| 3 | 刘钰. 基于导航误差约束的水面无人艇路径规划方法研究[D]. 南京: 东南大学, 2017. |
| LIU Y. Research on the path planning method of surface unmanned craft based on navigation error constraints[D]. Nanjing: Southeast University, 2017. | |
| 4 | WANG Y L, LIANG X, LI B A, et al. Research and implementation of global path planning for unmanned surface vehicle based on electronic chart[C]//Proc. of the International Conference on Mechatronics and Intelligent Robotics, 2018. |
| 5 | 巩敦卫, 耿娜, 张勇. 多地貌环境下的移动机器人路径规划研究[J]. 控制与决策, 2012, 27 (5): 708- 712. |
| GONG D W , GENG N , ZHANG Y . Robot path planning in environment of many terrains[J]. Control and Decision, 2012, 27 (5): 708- 712. | |
| 6 | KOZYNCHENKO A I , KOZYNCHENKO S A . Applying the dynamic predictive guidance to ship collision avoidance: crossing case study simulation[J]. Ocean Engineering, 2018, 164 (7): 640- 649. |
| 7 | 巩敦卫, 耿娜, 张勇. 密集障碍物环境下基于凸包和微粒群优化的机器人路径规划[J]. 控制理论与应用, 2012, 29 (5): 609- 616. |
| GONG D W , GENG N , ZHANG Y . Robot path planning in environment with dense obstacle based on convex hull and particle swarm optimization[J]. Control Theory and Application, 2012, 29 (5): 609- 616. | |
| 8 | ZHANG Y , GONG D W , ZHANG J H . Robot path planning in uncertain environment using multi-objective particle swarm optimization[J]. Neurocomputing, 2013, 103 (9): 172- 185. |
| 9 |
YU J B , DENG W , ZHAO Z Y , et al. A hybrid path planning method for an unmanned cruise ship in water quality sampling[J]. IEEE Access, 2019, 7, 87127- 87140.
doi: 10.1109/ACCESS.2019.2925894 |
| 10 |
GENG N , MENG Q G , GONG D W , at el . How good are distributed allocation algorithms for solving urban search and rescue problems? a comparative study with centralized algorithms[J]. IEEE Trans.on Automation Science and Engineering, 2019, 16 (1): 478- 485.
doi: 10.1109/TASE.2018.2866395 |
| 11 | WANG N , JIN X Z , JOOER M , at el . A multilayer path planner for a USV under complex marine environments[J]. Ocean Engineering, 2019, 184 (5): 1- 10. |
| 12 | NAIR R S, SUPRIYA P. Robotic path planning using recurrent neural networks[C]//Proc. of the 11th International Conference on Computing, Communication and Networking Technologies, 2020. |
| 13 | RAMEZANLOU M T, AZIMIRAD V, ZAKERI M. Hybrid path planning of robots through optimal control and PSO algorithm[C]//Proc. of the 7th International Conference on Robotics and Mechatronics, 2019. |
| 14 | NOGUCHI Y, MAKI T. Path planning method based on artificial potential field and reinforcement learning for intervention AUVs[C]//Proc. of the IEEE Underwater Technology, 2019. |
| 15 | PANDA R K, CHOUDHURY B B. An effective path planning of mobile robot using genetic algorithm[C]//Proc. of the IEEE International Conference on Computational Intelligence & Communication Technology, 2015. |
| 16 | GOYAL J K, NAGLA K S. A new approach of path planning for mobile robots[C]//Proc. of the International Conference on Advances in Computing, Communications and Informatics, 2014. |
| 17 | 贾茂良. 基于电子海图的无人艇路径规划[D]. 天津: 天津理工大学, 2019. |
| JIA M L. Unmanned boat path planning based on electronic chart[D]. Tianjin: Tianjin University of Technology, 2019. | |
| 18 |
SHI B H , SU Y X , ZHANG H J . Obstacles modeling method in cluttered environments using satellite images and its application to path planning for USV[J]. International Journal of Naval Architecture and Ocean Engineering, 2019, 11 (1): 202- 210.
doi: 10.1016/j.ijnaoe.2018.04.001 |
| 19 | 冯凯, 吉星, 杨昕. A*算法在自动驾驶车辆路径规划中的应用[J]. 汽车实用技术, 2020, 45 (22): 25- 28. |
| FENG K , JI X , YANG X . Application of A* algorithm in path planning of autonomous vehicles[J]. Automobile Applied Technology, 2020, 45 (22): 25- 28. | |
| 20 | EIFFERT S, KONG H, PIRMARZDASHTI N. Path planning in dynamic environments using generative RNNs and Monte Carlo tree search[C]//Proc. of the IEEE International Confe-rence on Robotics and Automation, 2020. |
| 21 | 梁波, 杨新民. 一种基于改进型Dijkstra算法的路线规划方法研究[J]. 信息化研究, 2020, 46 (2): 13- 16. |
| LIANG B , YANG X M . Study on a path planning method based on the improved Dijkstra algorithm[J]. Informatization Research, 2020, 46 (2): 13- 16. |
| [1] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [2] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [3] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| [4] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [5] | Tong HAN, Andi TANG, Huan ZHOU, Dengwu XU, Lei XIE. Multiple UAV cooperative path planning based on LASSA method [J]. Systems Engineering and Electronics, 2022, 44(1): 233-241. |
| [6] | Weiqiang MA, Yongqi GAO, Miao ZHAO. Global-best difference-mutation brain storm optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(1): 270-278. |
| [7] | Lei LAI, Kun ZOU, Dewei WU, Baozhong LI. Multi-UAV cooperative path planning based on improved MOFA evolution of interactive strategy [J]. Systems Engineering and Electronics, 2021, 43(8): 2282-2289. |
| [8] | Zhiqiang JIAO, Jieyong ZHANG, Peiyang YAO, Xun WANG, Yichao HE. Distributed evolution method of C4ISR service deployment based on hierarchical structure [J]. Systems Engineering and Electronics, 2021, 43(6): 1572-1585. |
| [9] | Wenming WANG, Jialu DU. Agent path planning based on regular hexagon grid JPS algorithm [J]. Systems Engineering and Electronics, 2021, 43(12): 3635-3642. |
| [10] | Yanan LI, Haibin HUANG, Liangming CHEN, Yufei ZHUANG, Xiaoli WANG. Energy-optimal three-dimensional path planning for AUV under changing ocean current environment [J]. Systems Engineering and Electronics, 2021, 43(12): 3667-3674. |
| [11] | Yao HAN, Shaohua LI. UAV path planning based on improved artificial potential field [J]. Systems Engineering and Electronics, 2021, 43(11): 3305-3311. |
| [12] | Daidai CHEN, Wanyou LI. Local path planning algorithm for USV with towed cable [J]. Systems Engineering and Electronics, 2020, 42(9): 1988-1994. |
| [13] | Quanxian ZHANG, Bin ZENG, Houpu LI. Underway replenishment path planning method for distributed naval warfare under the influence of sea conditions [J]. Systems Engineering and Electronics, 2020, 42(10): 2312-2319. |
| [14] | Sheng GAO, Jianliang AI, Zhihao WANG. Mixed population RRT algorithm for UAV path planning [J]. Systems Engineering and Electronics, 2020, 42(1): 101-107. |
| [15] | LIAN Qingpo, WANG Hongjian, YUAN Jianya, GAO Na, HU Wenyue. USV cluster collision avoidance based on particle swarm optimization algorithm [J]. Systems Engineering and Electronics, 2019, 41(9): 2034-2040. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||