Systems Engineering and Electronics ›› 2026, Vol. 48 ›› Issue (1): 172-184.doi: 10.12305/j.issn.1001-506X.2026.01.16
• Systems Engineering • Previous Articles Next Articles
Distributed adaptive multi-UAV collaborative path planning in unknown denial environments
Qichen XU( ), Zhaohui ZHANG, Jing LI
), Zhaohui ZHANG, Jing LI
- School of Mathematics and Statistics,Xidian University,Xi’an 710126,China
-
Received:2024-06-11Online:2026-01-25Published:2026-02-11 -
Contact:Zhaohui ZHANG E-mail:qcxu0220@163.com
CLC Number:
Cite this article
Qichen XU, Zhaohui ZHANG, Jing LI. Distributed adaptive multi-UAV collaborative path planning in unknown denial environments[J]. Systems Engineering and Electronics, 2026, 48(1): 172-184.
share this article

Fig.1
System architecture diagram"
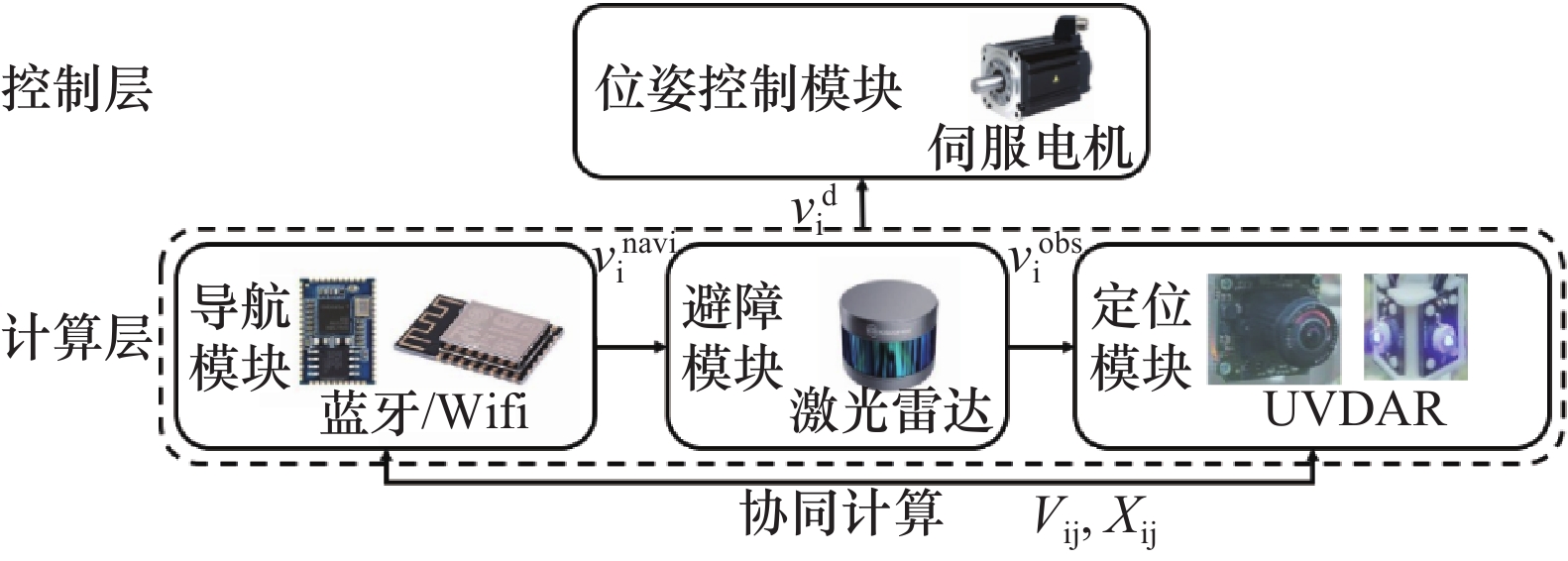
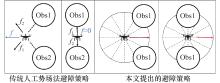
Fig.2
Differences in the effectiveness of obstacle avoidence strategies"
Fig.3
Diagram of blocked viewline blocked at time t"
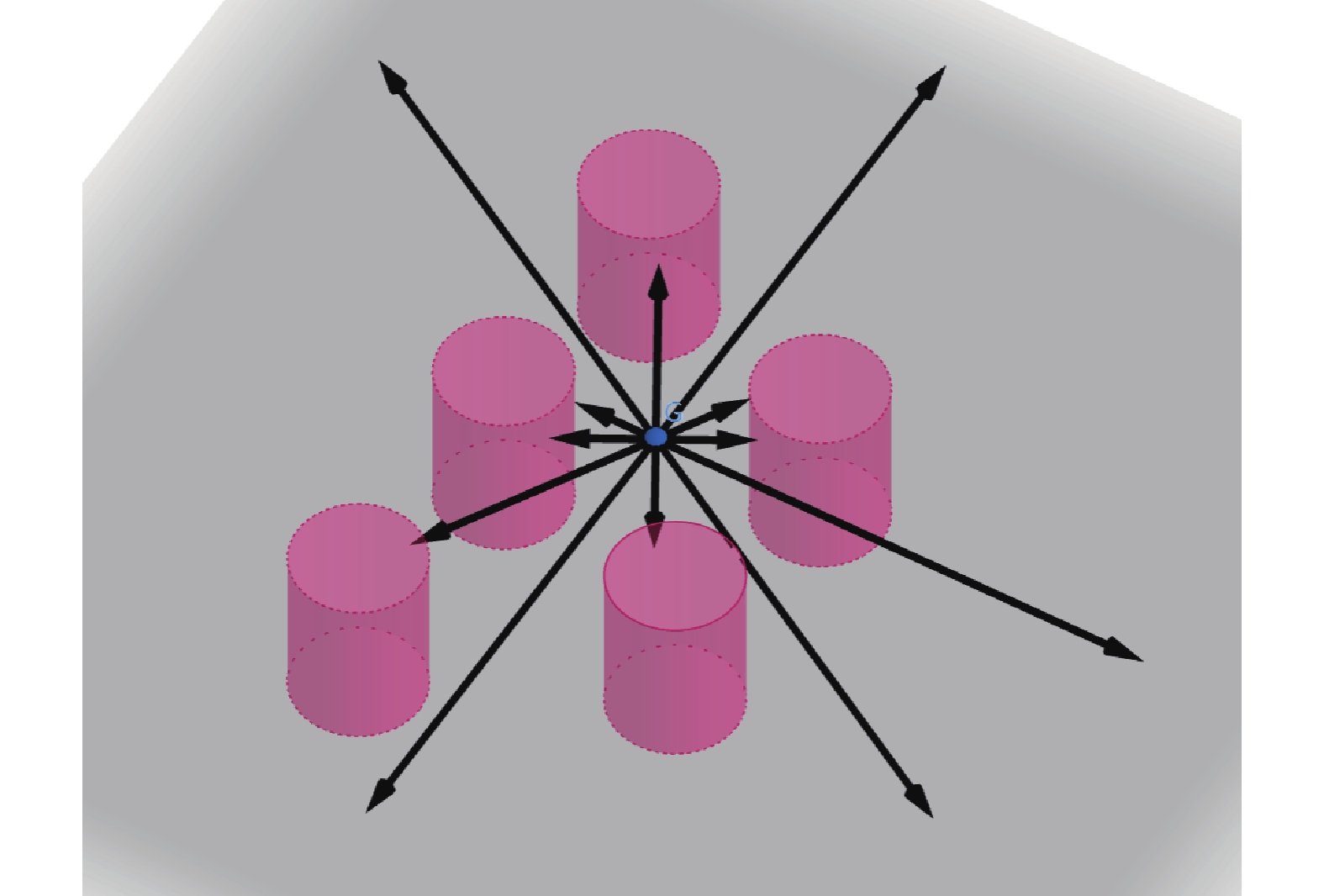
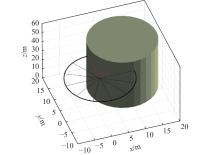
Fig.4
Diagram of UAV viewlines intersected with obstacle"
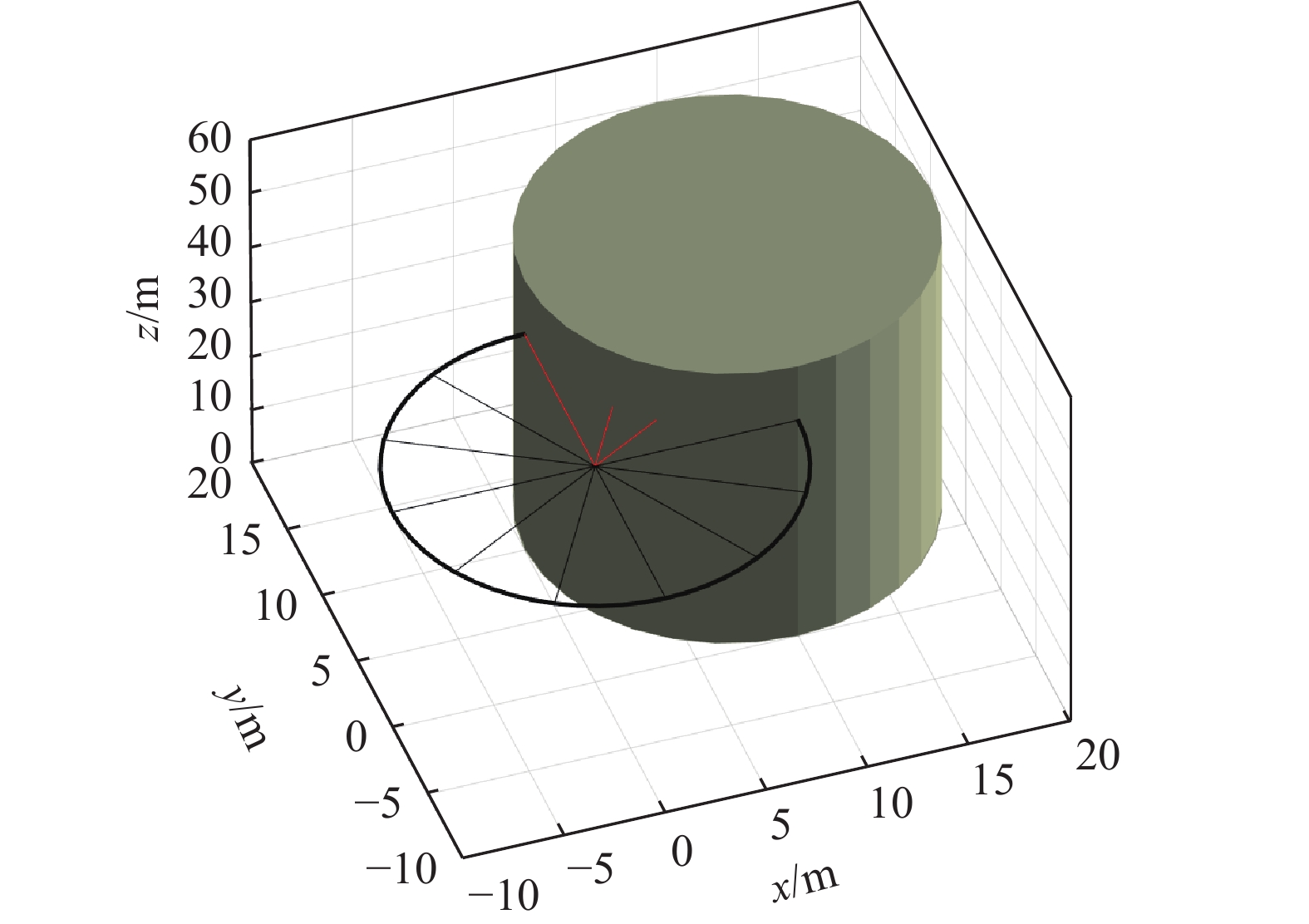
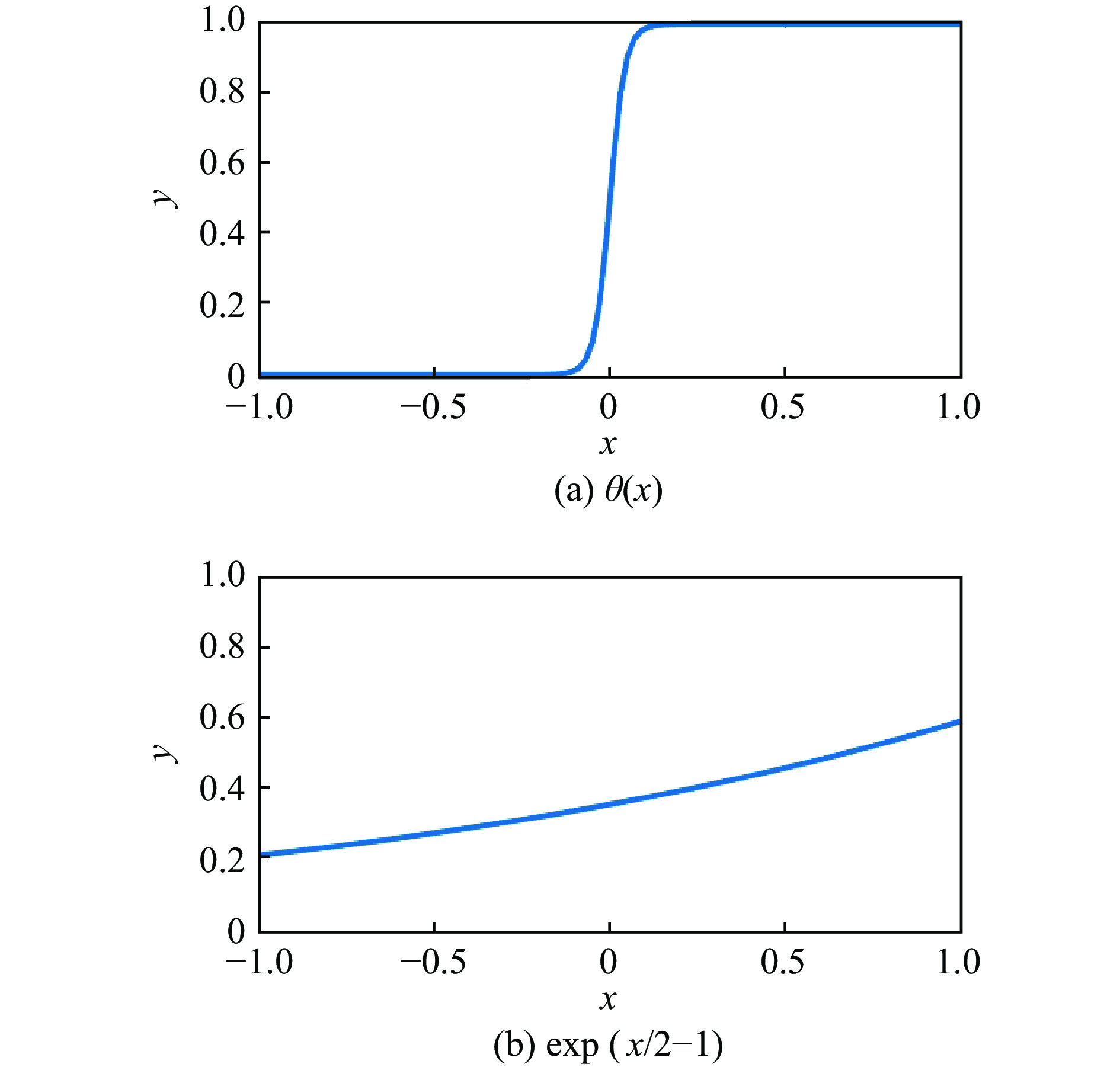
Fig.5
Diagram of functions to normalize"
Table 1
Viewlines’ scores at a certain time"
| 编号 | k | |||||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | |
| F_dire | 0.578 | 0.383 | ||||||||||
| F_dist | 0.65 | |||||||||||
| F | ||||||||||||
| 单位方向 | 40.00 | 6.25 | 3.89 | 0.00 | −8.11 | −34.64 | −6.70 | −6.57 | −9.95 | 0.00 | 5.03 | 34.64 |
| 0.00 | 3.61 | 6.74 | 40.00 | 14.05 | 20.00 | 0.00 | −3.79 | −17.23 | −40.00 | −8.71 | −20.00 | |
| 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | 0.00 | |
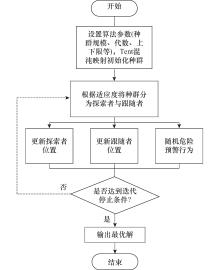
Fig.6
Optimization procedure diagram based on SSA"
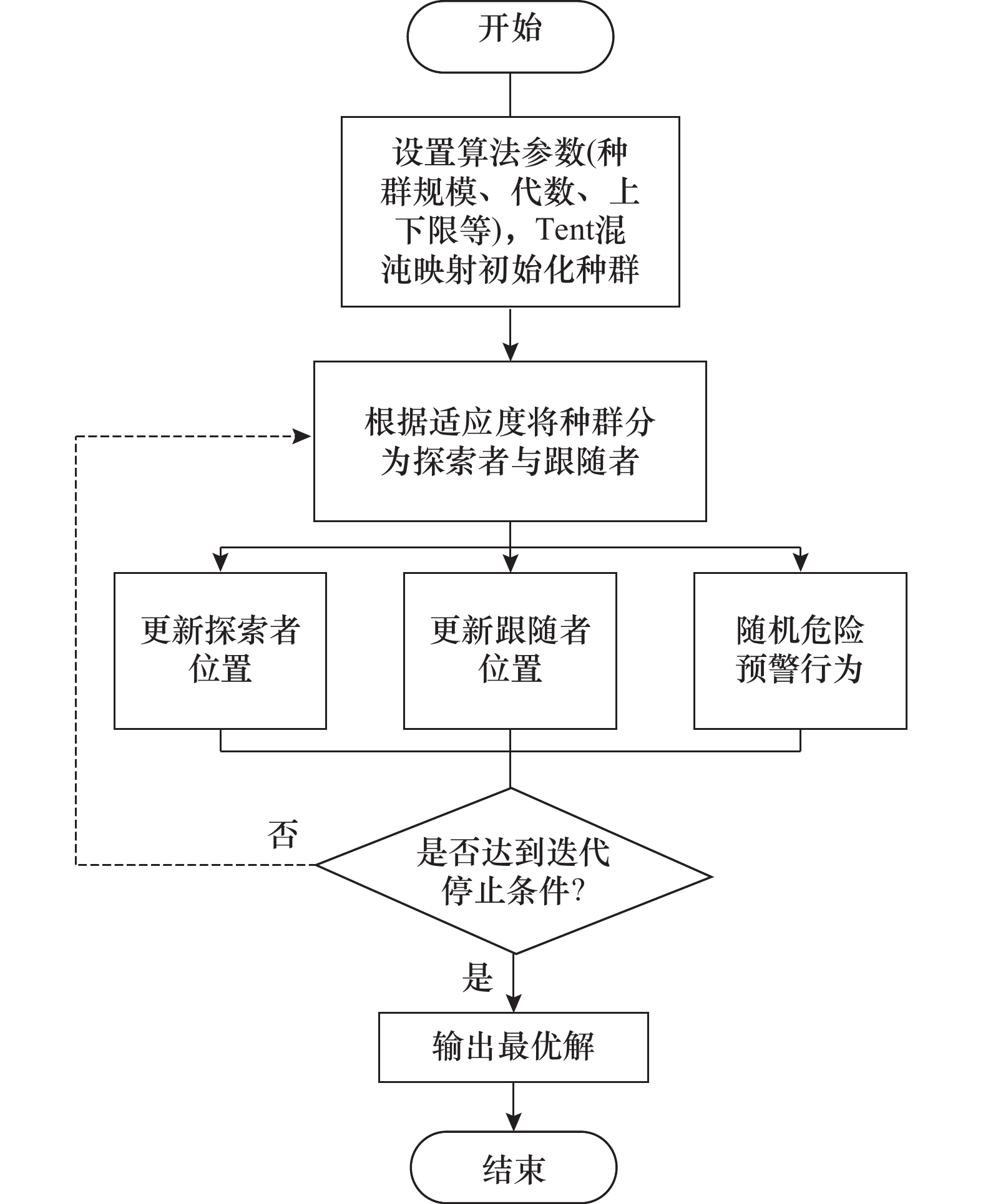
Table 2
Facilities of each index"
| 参数 | 参数范围 | 最优点 |
| 1 | ||
| 1 | ||
| 0 | ||
| 0 | ||
| 1 |

Fig.7
UAVs’ positions at time $t$"
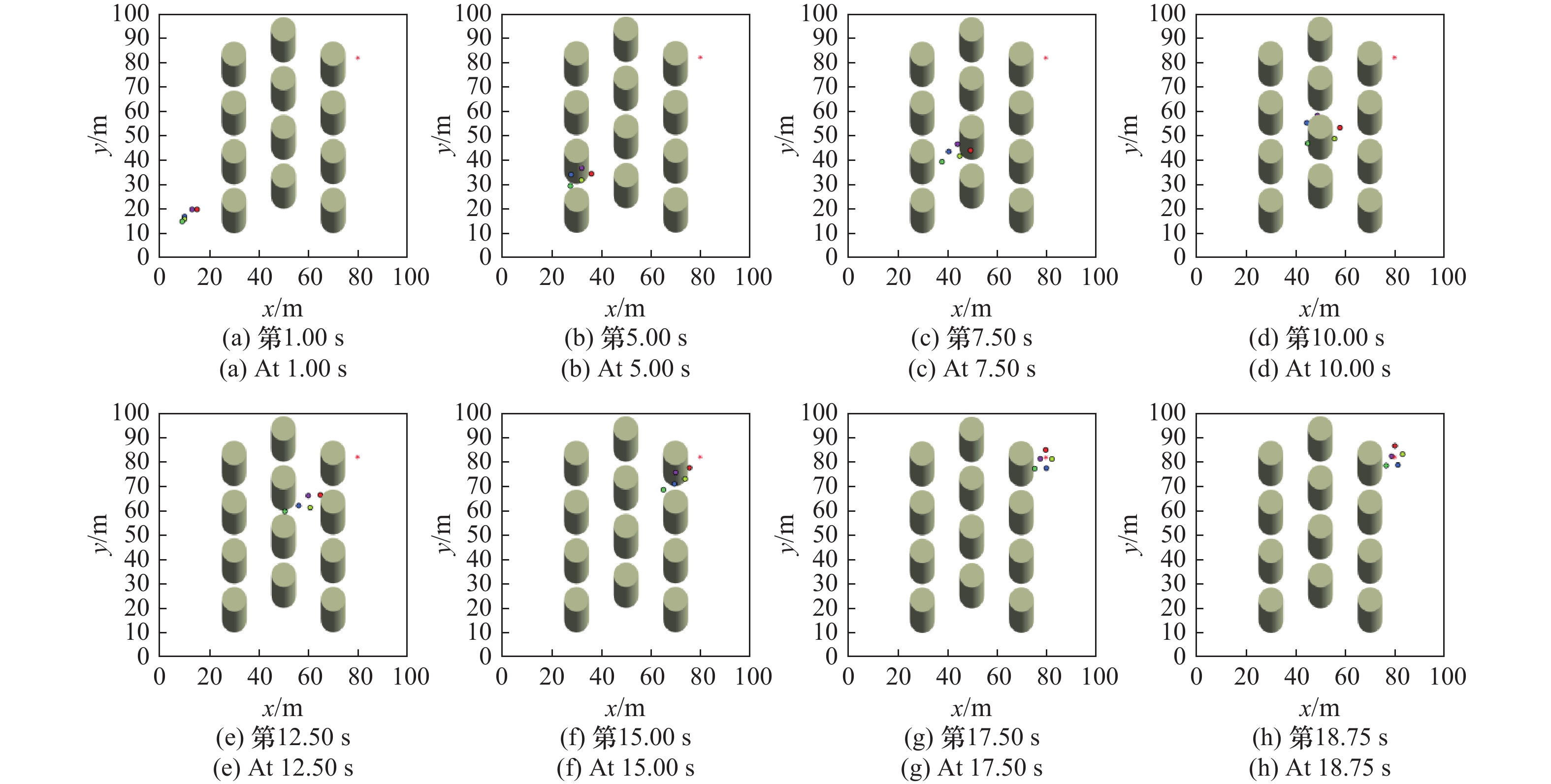
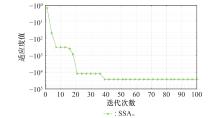
Fig.8
Diagram of fitness decline curve"

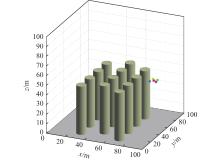
Fig.9
Obstacle Scene 1"
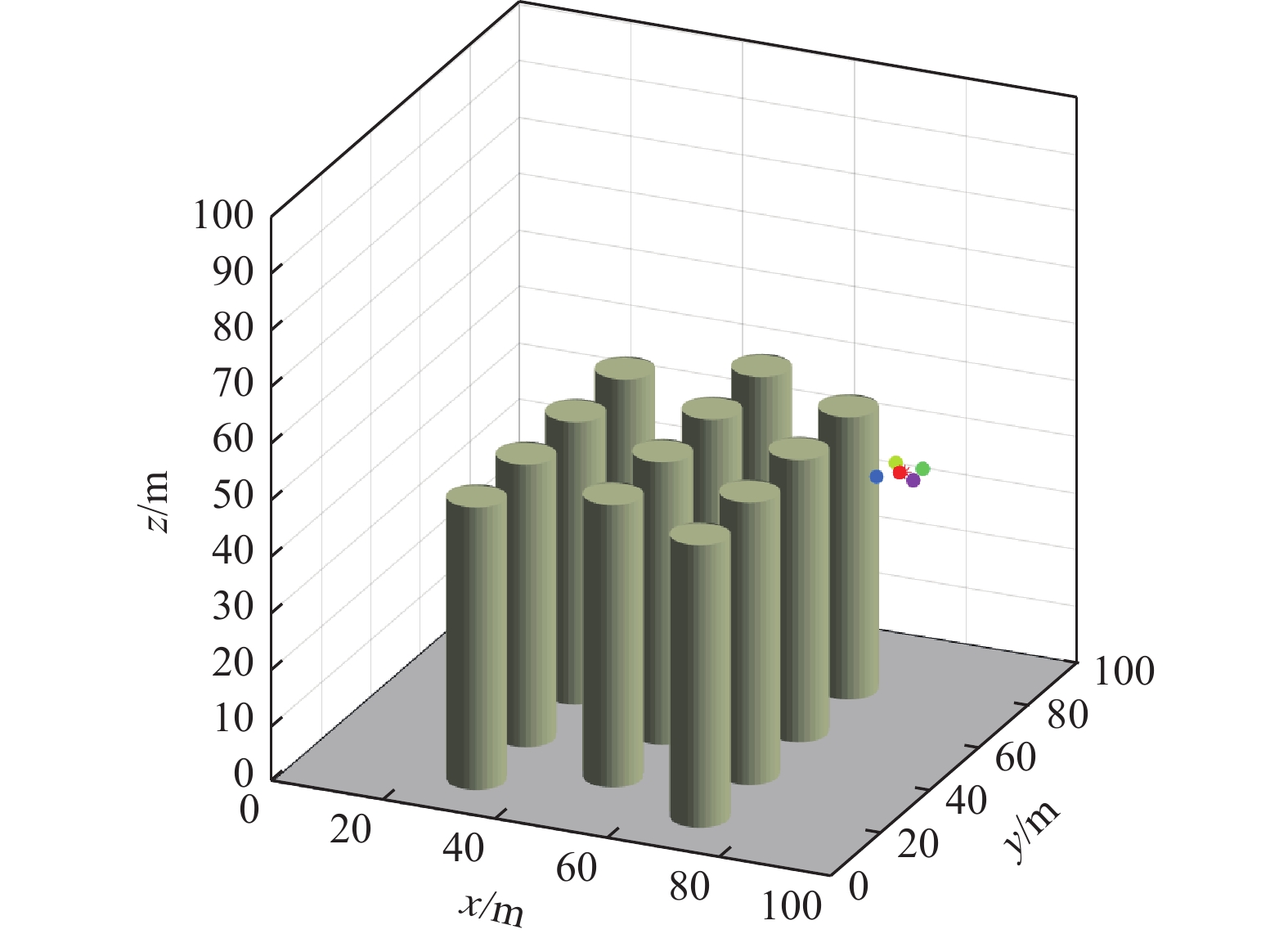
Table 3
Parameters after optimization"
| 参数 | 数值 |
| 0.01 | |
| − |
Fig.10
Path planning after optimization"
Fig.11
Average distance-time between UAVs"
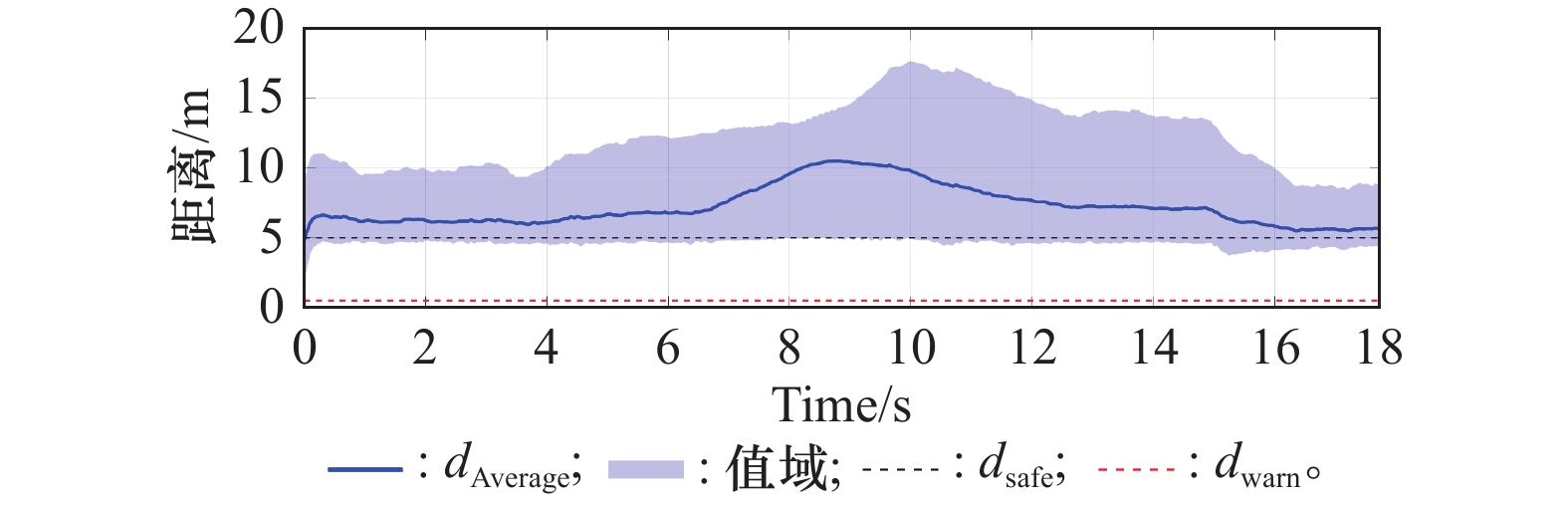
Fig.12
Average velocity-time of UAVs"
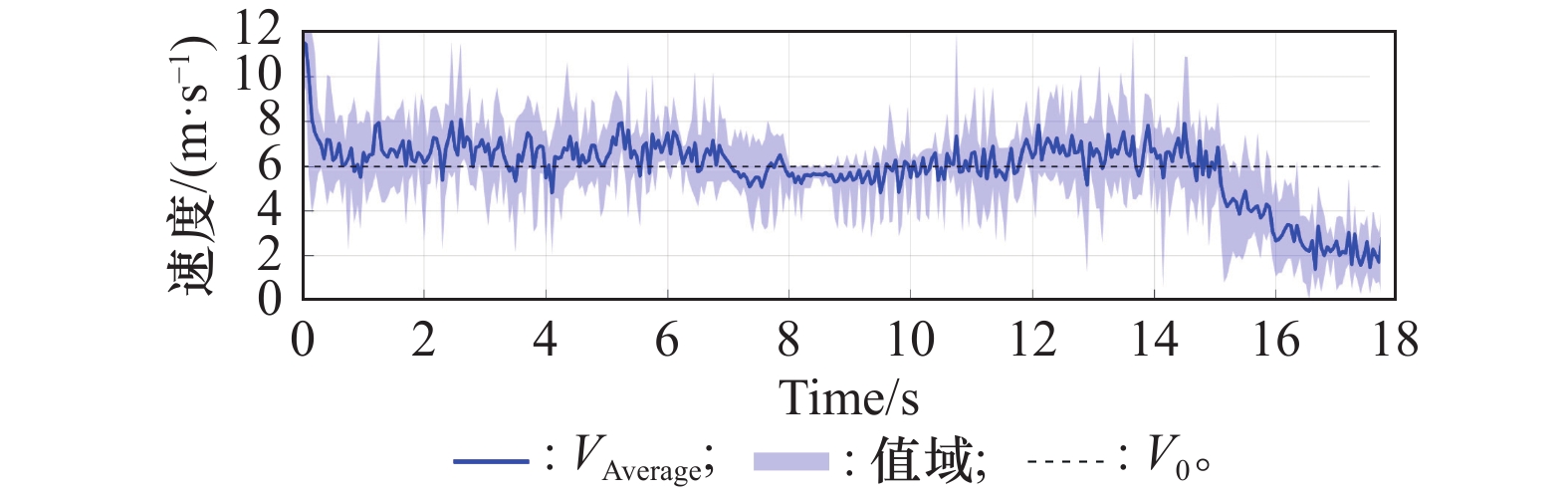

Fig.13
UAVs’ positions in Scene 2"
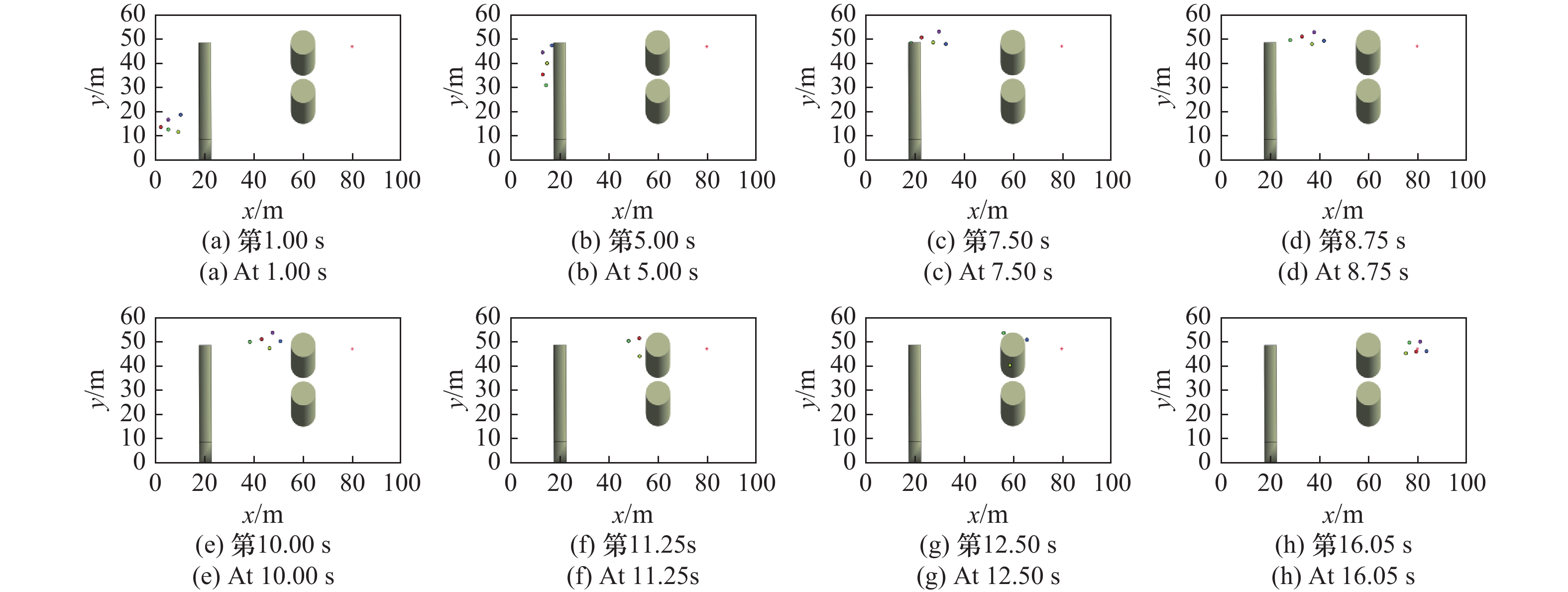
Fig.14
Obstacle Scene 2"
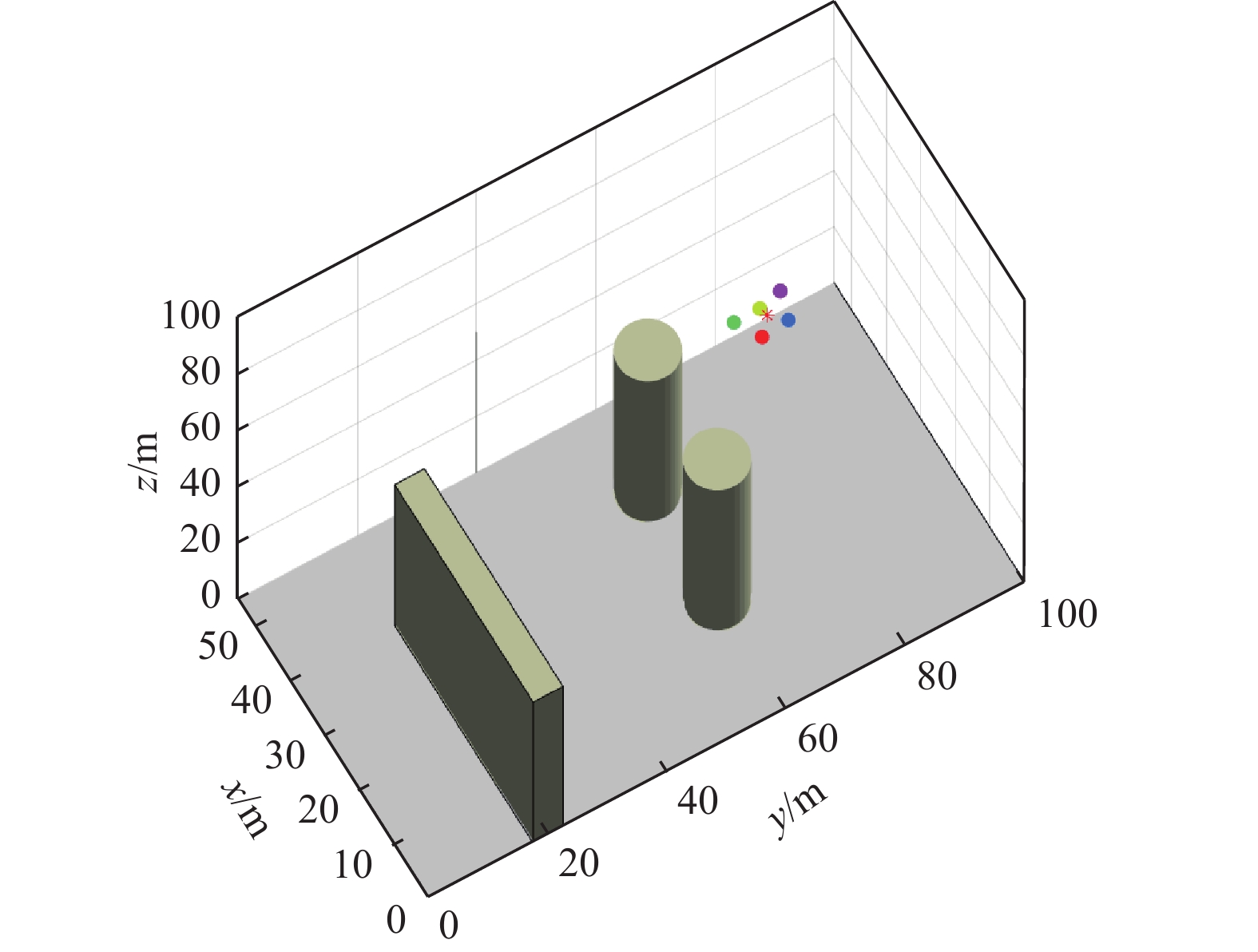
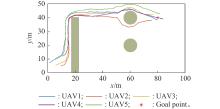
Fig.15
Path planning in Scene 2"
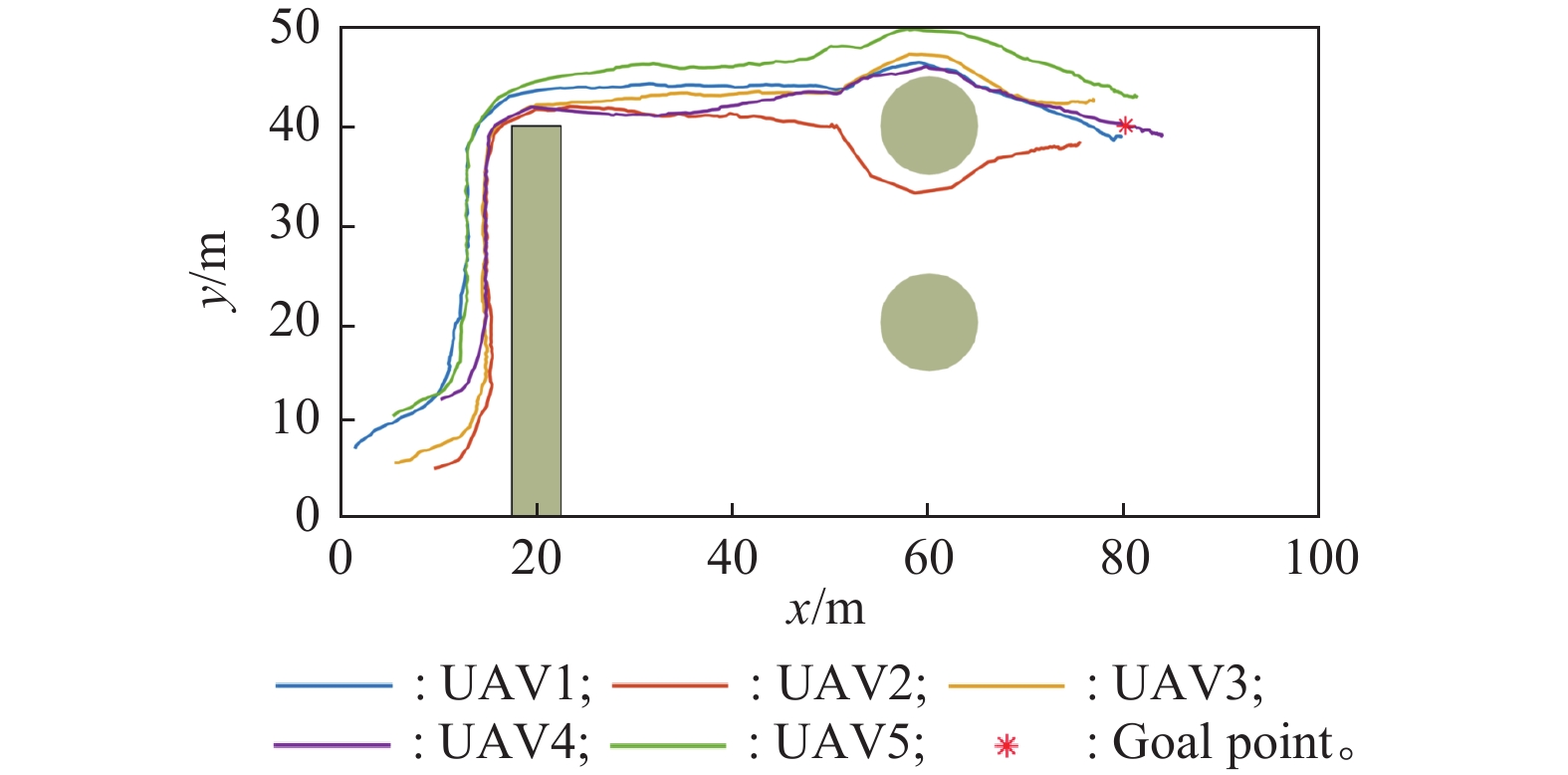
Fig.16
Average distance-time between UAVs in Scene 2"
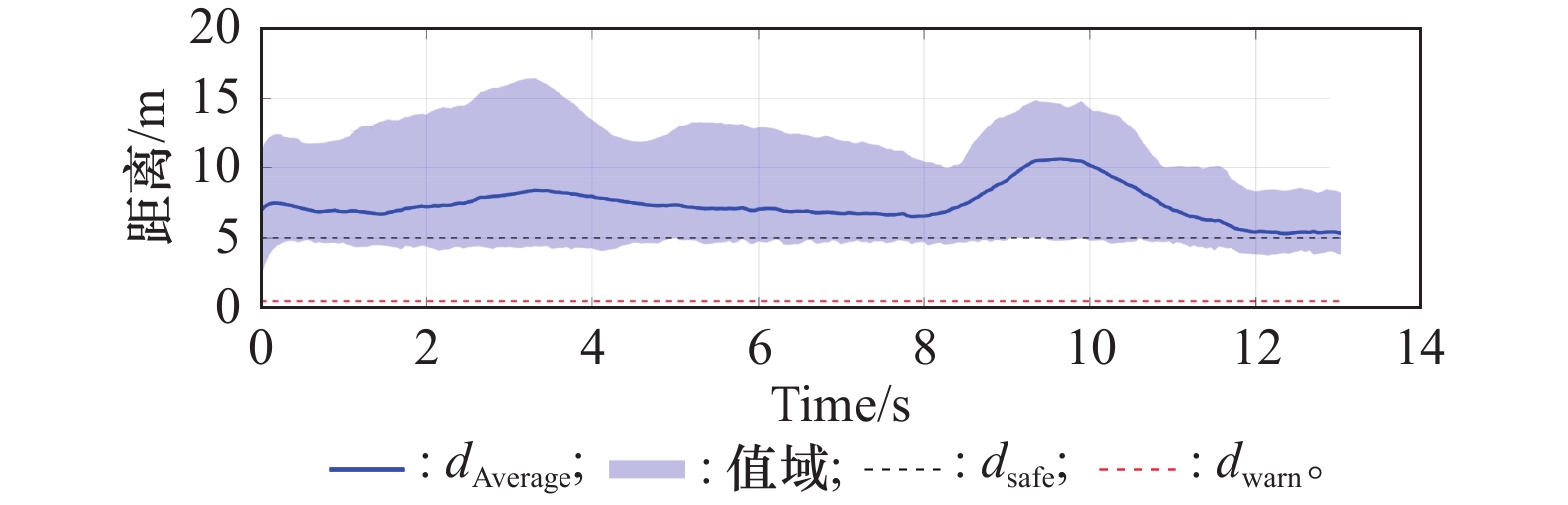
Fig.17
Average velocity-time of UAVs in Scene 2"
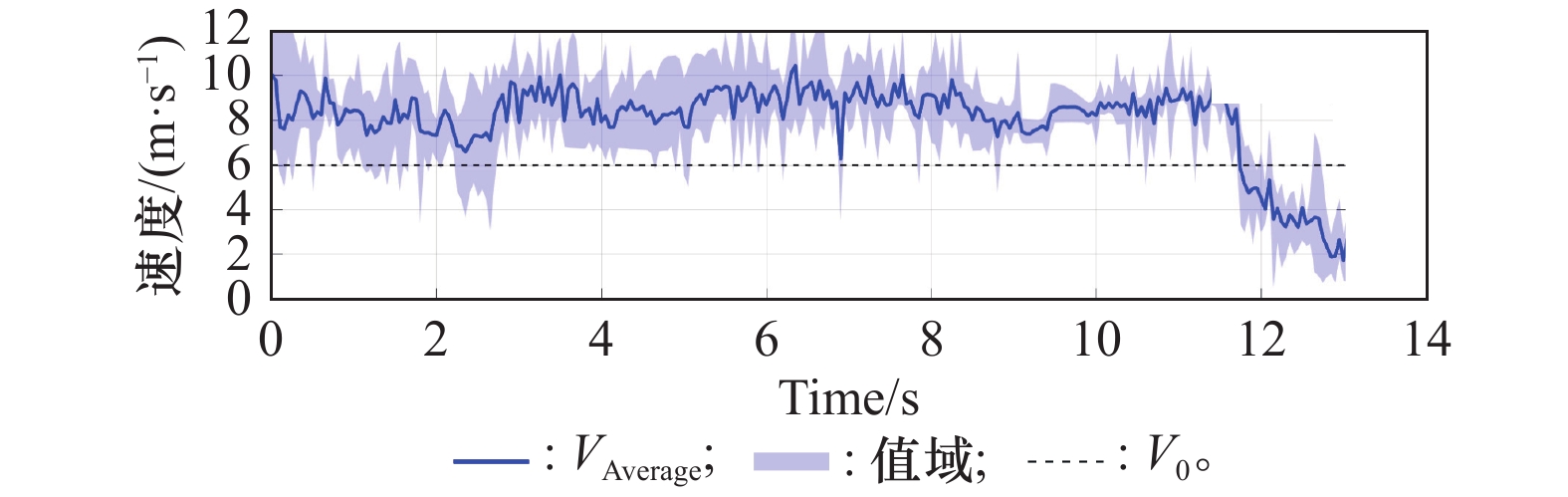

Fig.18
UAVs’ positions in Scene 3"
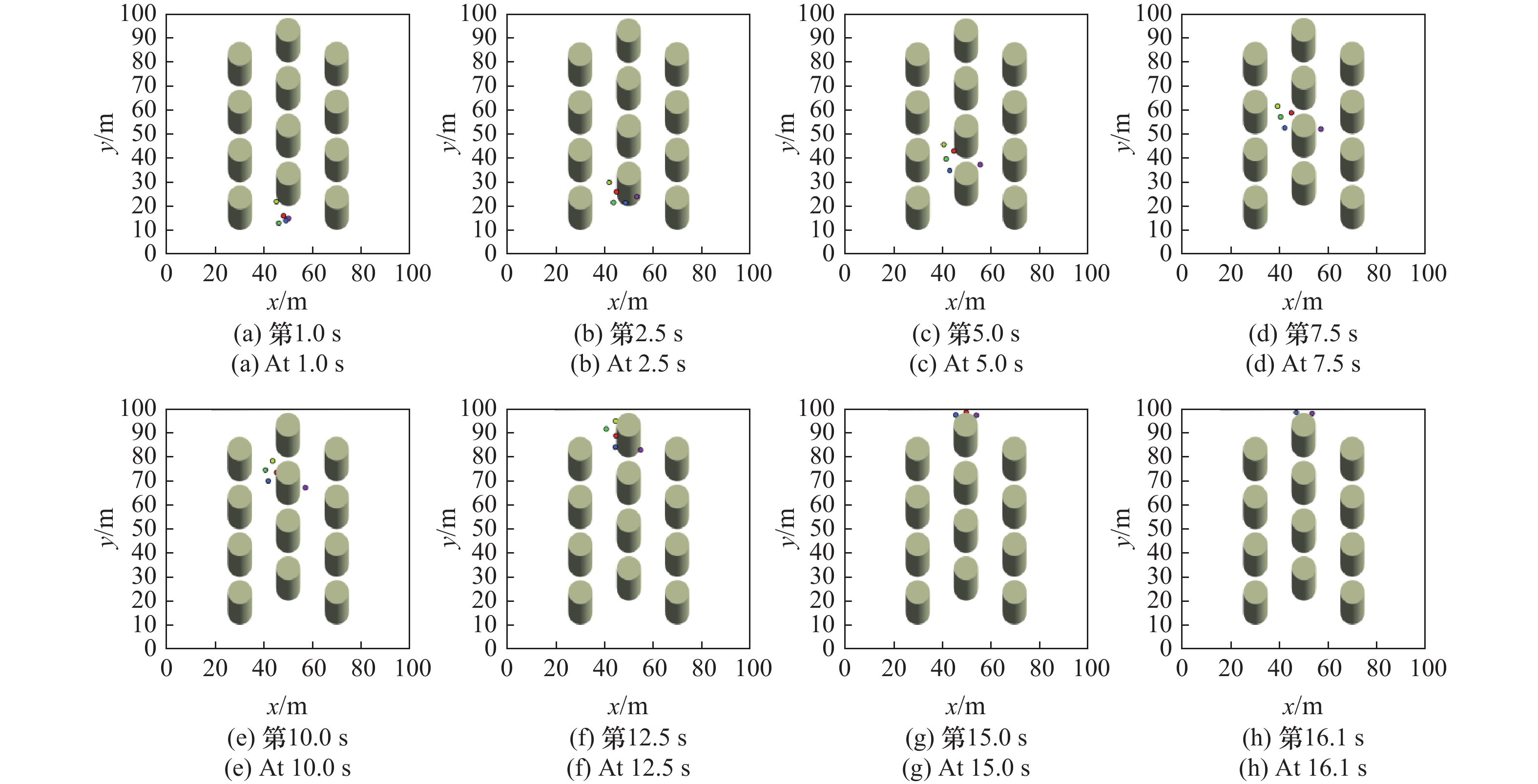
Fig.19
Path planning in Scene 3"
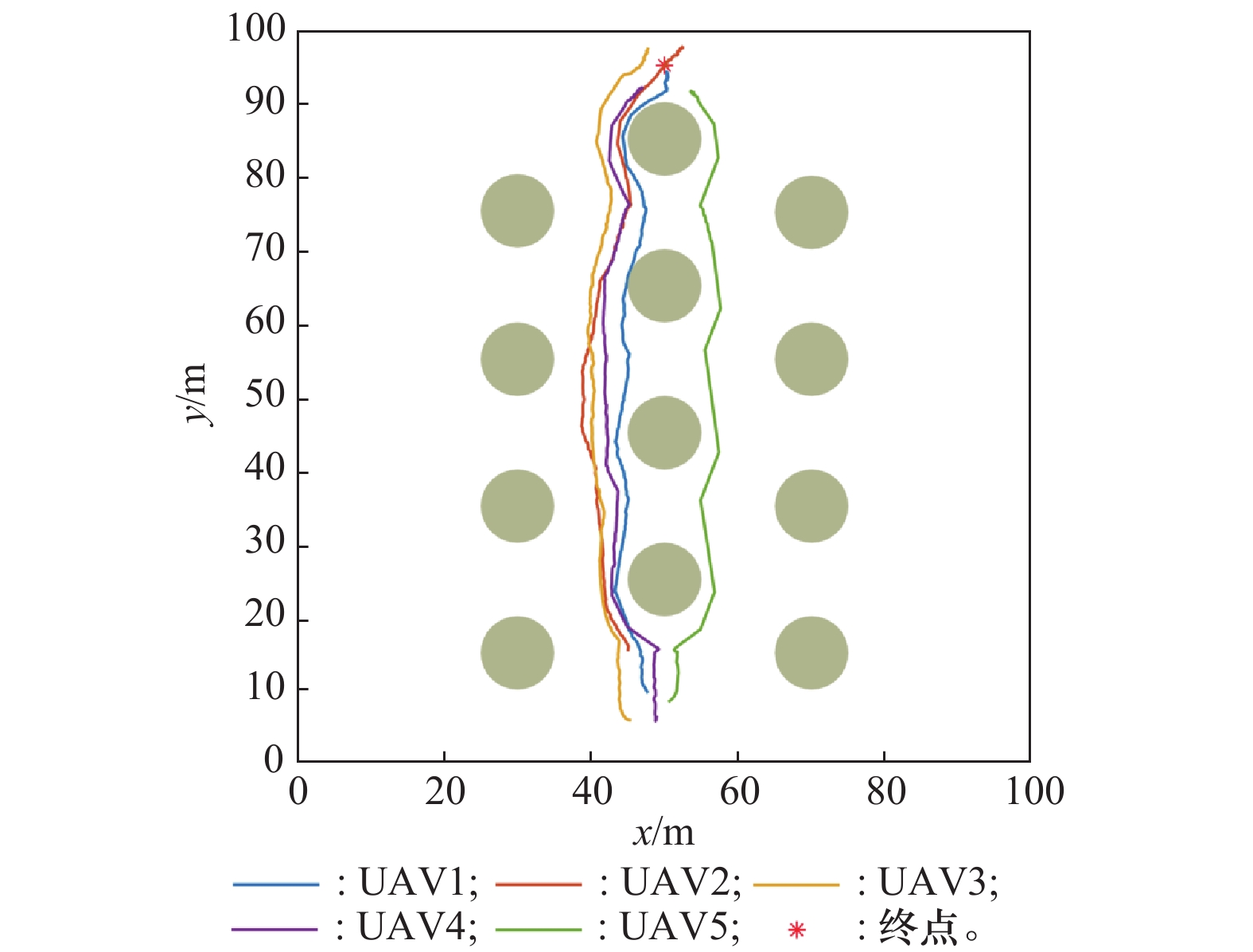
Fig.20
Average distance between UAVs in Scene 3"
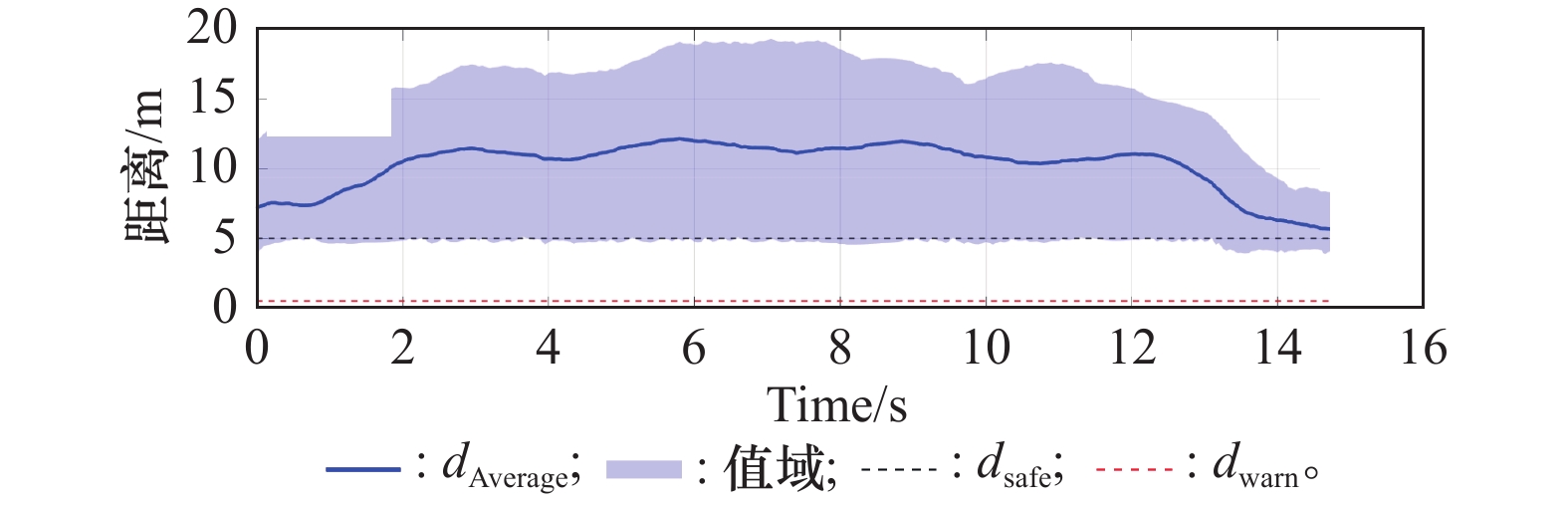
Fig.21
Average velocity-time of UAVs in Scene 3"
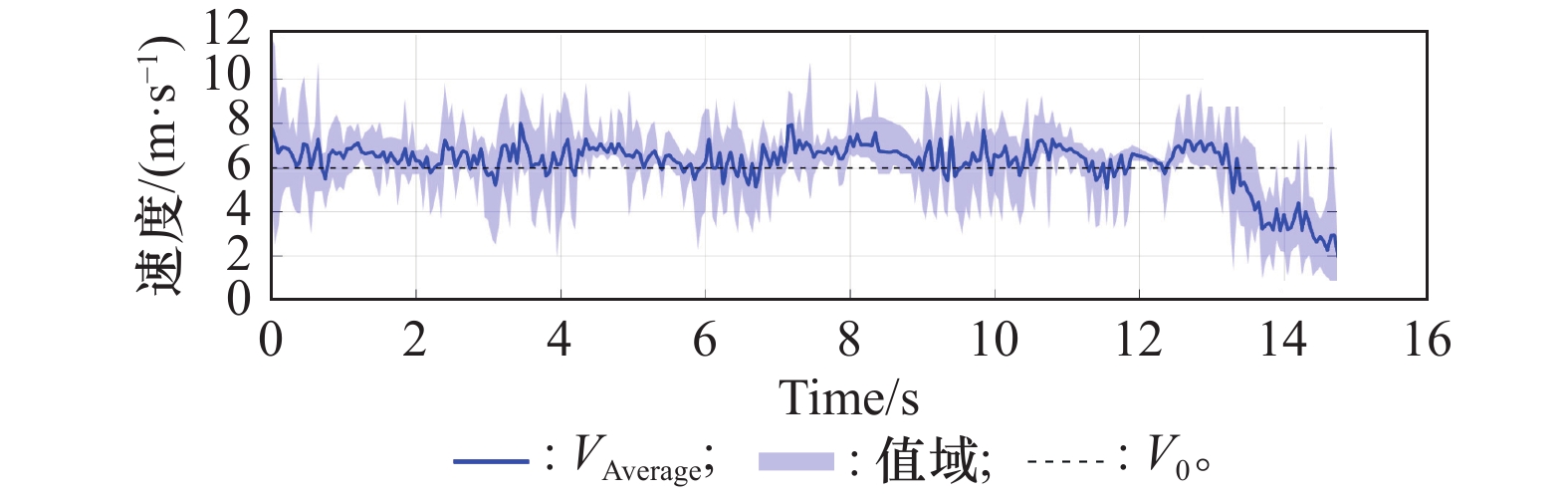
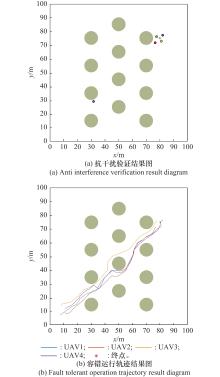
Fig.22
proof of anti-interference"
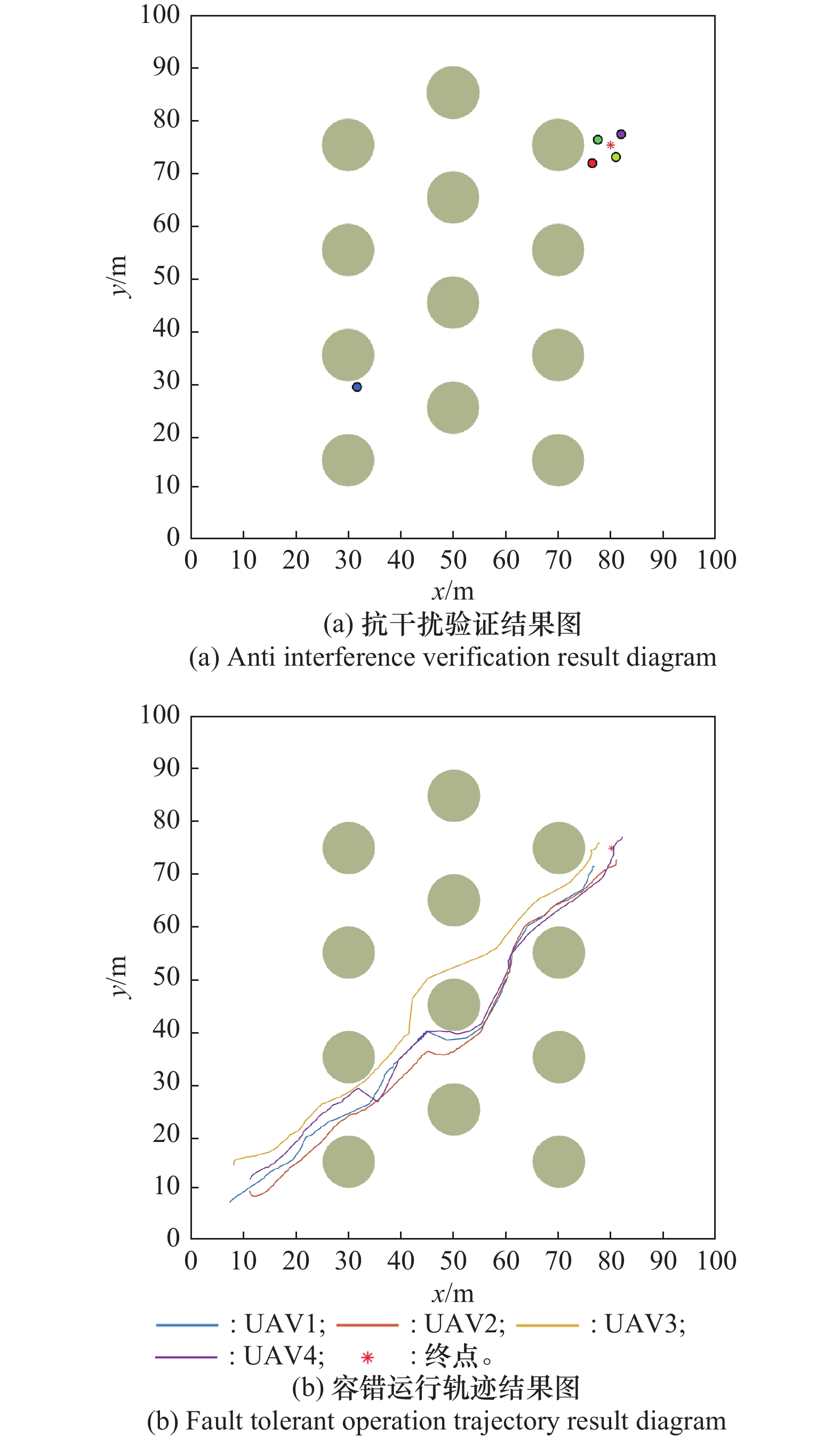
Table 4
Comparision of arrival time to destination"
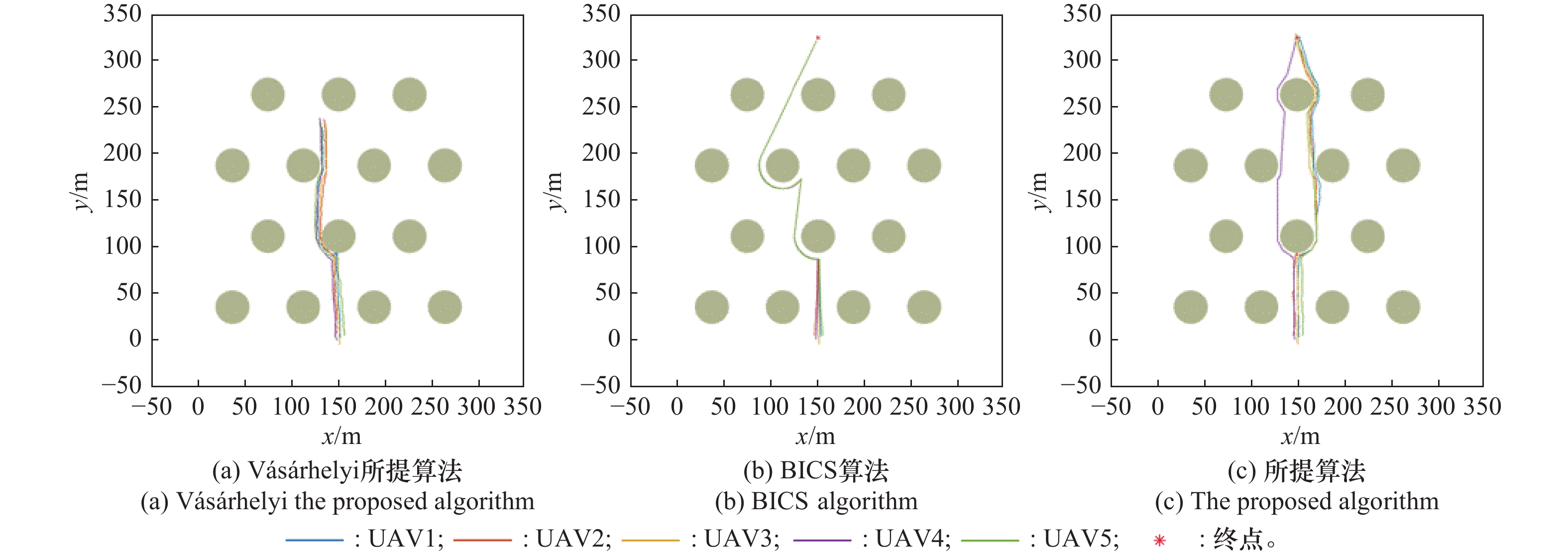
| 算法 | 所提算法 | Vásárhelyi所提算法 | BICS算法 |
| 时间/s | 58.05 | 100+ | 65 |

Fig.23
comparation of algorithms"
| 1 | 郭晶晶, 刘允刚, 满永超, 等. 自主多旋翼无人机系统: 感知、规划与控制[J]. 控制理论与应用, 2024, 41(10): 1707− 1725 |
| GUO J J, LIU Y G, MAN Y C, et al. Autonomous multi-rotor unmanned aerial vehicle system: perception, planning, and control [J]. Control Theory & Applications, 2024, 41(10): 1707− 1725 | |
| 2 | ZHOU Z W, DUAN H B, FAN Y M. Unmanned aerial vehicle close formation control based on the behavior mechanism in wild geese[J]. Science China Information Sciences, 2017, 47 (3): 230- 238. |
| 3 | 唐嘉宁, 陈伟, 陈云浩, 等. 一种多无人机协同定位与稠密地图构建算法[J]. 科学技术与工程, 2023, 23(35): 15124−15132. |
| TANG J N, CHEN W, CHEN Y H, et al. A multi UAV collaborative localization and dense map construction algorithm. Science Technology and Engineering, 2023, 23(35): 15124−15132. | |
| 4 | 李鸿一, 陈锦涛, 任鸿儒, 等. 基于随机采样的高层消防无人机协同搜索规划[J]. 中国科学: 信息科学, 2022, 52 (9): 1610. |
| LI H Y, CHEN J T, REN H R, et al. Collaborative search planning for high-rise firefighting uavs based on random sampling[J]. SCIENCE CHINA Information Sciences, 2022, 52 (9): 1610. | |
| 5 |
ARAFAT M Y, MOH S. Localization and clustering based on swarm intelligence in uav networks for emergency communications[J]. IEEE Internet of Things, 2019, 6 (5): 8958- 8976.
doi: 10.1109/JIOT.2019.2925567 |
| 6 |
CHEN R, YANG B, ZHANG W. Distributed and collaborative localization for swarming UAVs[J]. IEEE Internet of Things, 2021, 8 (6): 5062- 5074.
doi: 10.1109/JIOT.2020.3037192 |
| 7 |
ODONKOR P, BALL Z, CHOWDHURY S. Distributed operation of collaborating unmanned aerial vehicles for time-sensitive oil spill mapping[J]. Swarm and Evolutionary Computation, 2019, 46, 52- 68.
doi: 10.1016/j.swevo.2019.01.005 |
| 8 |
ZHOU B Y, XU H, SHEN S J. RACER: rapid collaborative exploration with a decentralized multi-UAV system[J]. IEEE Trans. on Robotics, 2023, 39 (3): 1816- 1835.
doi: 10.1109/TRO.2023.3236945 |
| 9 |
ZHOU L Y, LENG S P, LIU Q, et al. Intelligent UAV swarm cooperation for multiple targets tracking[J]. IEEE Internet of Things, 2022, 9 (1): 743- 754.
doi: 10.1109/JIOT.2021.3085673 |
| 10 | 贾永楠, 田似营, 李擎. 无人机集群研究进展综述[J]. 航空学报, 2020, 41 (S1): 4- 14. |
| JIA Y N, TIAN S Y, LI Q. A review of research progress on UAV swarm[J]. Acta Aeronautica Astronautica Sinica, 2020, 41 (S1): 4- 14. | |
| 11 |
王峰, 张衡, 韩孟臣, 等. 基于协同进化的混合变量多目标粒子群优化算法求解无人机协同多任务分配问题[J]. 计算机学报, 2021, 44 (10): 1967- 1983.
doi: 10.11897/SP.J.1016.2021.01967 |
|
WANG F, ZHANG H, HAN M C, et al. A hybrid variable multi objective particle swarm optimization algorithm based on coevolution for solving the collaborative multi task allocation problem of unmanned aerial vehicles[J]. Chinese Journal of Computers, 2021, 44 (10): 1967- 1983.
doi: 10.11897/SP.J.1016.2021.01967 |
|
| 12 | 王尔申, 刘帆, 宏晨, 等. 基于MASAC的无人机集群对抗博弈方法[J]. 中国科学: 信息科学, 2022, 52 (12): 2254−2269. |
| WANG E S, LIU F, HONG C, et al. MASAC based unmanned aerial vehicle swarm adversarial game method[J]. Science China Information Sciences, 2022, 52 (12): 2254−2269. | |
| 13 |
文超, 董文瀚, 解武杰, 等. 基于CEA-GA的多无人机三维协同曲线航迹规划方法[J]. 北京航空航天大学学报, 2023, 49 (11): 3086- 3099.
doi: 10.13700/j.bh.1001-5965.2021.0787 |
|
WEN C, DONG W H, XIE W J, et al. A three-dimensional collaborative curve trajectory planning method for multi-UAVs based on CEA-GA algorithm[J]. Journal of Beijing University Aeronautica Astronautica, 2023, 49 (11): 3086- 3099.
doi: 10.13700/j.bh.1001-5965.2021.0787 |
|
| 14 |
韩统, 汤安迪, 周欢, 等. 基于LASSA算法的多无人机协同航迹规划方法[J]. 系统工程与电子技术, 2022, 44 (1): 233- 241.
doi: 10.12305/j.issn.1001-506X.2022.01.29 |
|
HAN T, TANG A D, ZHOU H, et al. A collaborative trajectory planning method for multi-UAVs based on LASSA algorithm[J]. Journal of Systems Engineering and Electronics, 2022, 44 (1): 233- 241.
doi: 10.12305/j.issn.1001-506X.2022.01.29 |
|
| 15 |
俞宬, 陈谋, 雍可南. 基于改进RRT*算法的无人机往返航迹规划[J]. 中国科学: 技术科学, 2023, 53 (11): 1911- 1921.
doi: 10.1360/SST-2021-0431 |
|
YU C, CHEN M, YONG K N. UAV round-trip trajectory planning based on improved RRT* algorithm[J]. cience China Technology Science, 2023, 53 (11): 1911- 1921.
doi: 10.1360/SST-2021-0431 |
|
| 16 |
ZHANG Z, JIANG J, WU J, et al. Efficient and optimal penetration path planning for stealth unmanned aerial vehicle using minimal radar cross-section tactics and modified a-star algorithm[J]. ISA Transactions, 2023, 134, 42- 57.
doi: 10.1016/j.isatra.2022.07.032 |
| 17 | REYNOLDS C W. Flocks, herds and schools: a distributed behavioral model [C]// Proc. of the 14th annual conference on Computer graphics and interactive techniques, 1987. |
| 18 |
VICSEK T, ZAFEIRIS A. Collective motion[J]. Physics Reports, 2012, 517 (3/4): 71- 140.
doi: 10.1016/j.physrep.2012.03.004 |
| 19 |
COUZIN I D, KRAUSE J, JAMES R, et al. Collective memory and spatial sorting in animal groups[J]. Journal of Theoretical Biology, 2002, 218 (1): 1- 11.
doi: 10.1006/jtbi.2002.3065 |
| 20 |
VASARHELYI G, VIRAGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined[J]. Science Robotics, 2018, 3 (20): eaat3536.
doi: 10.1126/scirobotics.aat3536 |
| 21 |
AFZAL A, DANIEL L B, GIUSEPPE S, et al. PAVNav: a collective navigation approach for uav swarms deprived of communication and external localization[J]. Bioinspiration and Biomimetics, 2022, 17 (6): 066019.
doi: 10.1088/1748-3190/ac98e6 |
| 22 |
PAVEL P, VIKTOR W, TOMAS B, et al. Bio-inspired compact swarms of unmanned aerial vehicles without communication and external localization[J]. Bioinspiration and Biomimetics, 2021, 16 (2): 026009.
doi: 10.1088/1748-3190/abc6b3 |
| 23 | TAN Y, SHI Y H, MILAN T. Advances in swarm intelligence[M]. Cham: Springer International Publishing, 2020. |
| 24 | CUI Y, WANG C, HU Q L, et al. A novel positioning method for uav in GNSS-denied environments based on mechanical antenna [J]. IEEE Trans. on Industrial Electronics, 2024, 71(10);13461−13469. |
| 25 |
WANG B W, SUN Y J, DO-DUY T, et al. Adaptive D-Hop connected dominating set in highly dynamic flying Ad-Hoc networks[J]. IEEE Trans. on Network Science and Engineering, 2021, 8 (3): 2651- 2664.
doi: 10.1109/TNSE.2021.3103873 |
| 26 |
SHEN G Q, LEI L, LI Z L, et al. Deep reinforcement learning for flocking motion of multi-UAV systems: learn from a digital twin[J]. IEEE Internet of Things, 2022, 9 (13): 11141- 11153.
doi: 10.1109/JIOT.2021.3127873 |
| 27 |
QIU H X, DUAN H B. A multi-objective pigeon-inspired optimization approach to UAV distributed flocking among obstacles[J]. Information Science, 2020, 509, 515- 529.
doi: 10.1016/j.ins.2018.06.061 |
| 28 |
CHOWDHURY A, DEBASHIS D. RGSO-UAV: reverse glowworm swarm optimization inspired UAV path-planning in a 3D dynamic environment[J]. Ad Hoc Networks, 2023, 140, 103068.
doi: 10.1016/j.adhoc.2022.103068 |
| 29 | CHEN H T, HE M, LIU J T, et al. A novel fractional-order flocking algorithm for large-scale UAV swarms[J]. Complex & Intelligent Systems, 2023, 9 (6): 6831- 6844. |
| 30 | KONG F B, CHEN H, LI H M, et al. Flocking with obstacle avoidance for fixed-wing unmanned aerial vehicles via nonlinear model predictive control [C]//Proc. of the 42nd Chinese Control Conference, 2023. |
| 31 | MIRSAEIDI H, SHARIFI A. Heuristic-based trajectory optimization for drone flocking with obstacle avoidance [C]// Proc. of the 11th RSI International Conference on Robotics and Mechatronics, 2023. |
| 32 |
WU J, LUO C B, LUO Y, et al. Distributed UAV swarm formation and collision avoidance strategies over fixed and switching topologies[J]. IEEE Trans. on Cybernetics, 2022, 52 (10): 10969- 10979.
doi: 10.1109/TCYB.2021.3132587 |
| 33 | AFZAL A, VIKTOR W, PAVEL P, et al. Autonomous aerial swarming in GNSS-denied environments with high obstacle density [C]//Proc. of the IEEE International Conference on Robotics and Automation, 2021. |
| 34 | 桂雪琪, 李春涛. 基于视野和速度引导的无人机集群避障算法[J]. 系统仿真学报, 2023, 36(3): 545−554. |
| GUI X Q, LI C T. Obstacle avoidance algorithm for unmanned aerial vehicle clusters based on field of view and speed guidance [J]. Journal of System Simulation, 2023, 36(3): 545−554. | |
| 35 |
RENAUD B, PAWEL R. A model of collective behavior based purely on vision[J]. Science Advances, 2020, 6 (6): eaay0792.
doi: 10.1126/sciadv.aay0792 |
| 36 | XUE J K, SHEN B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science & Control Engineering, 2020, 8 (1): 22- 34. |
| [1] | Xinyu QI, Zhi ZHANG, Xiaobing SHANG, Yiqiong ZHANG, Lichao JIANG, Yuexin ZHOU. Robust trajectory planning for ship collision avoidance based on polynomial chaotic expansion [J]. Systems Engineering and Electronics, 2025, 47(2): 621-632. |
| [2] | Yuheng HE, Hongjie YUAN, He LI, Zhisheng LI. Local temperature prediction for aircraft parking based on BP neural network optimized by sparrow search algorithm [J]. Systems Engineering and Electronics, 2025, 47(11): 3655-3662. |
| [3] | Chen WANG, Cheng ZHU, Xiangke WANG, Zhaoyun DING, Qianzhen ZHANG, Sheng ZHANG, Xianqiang ZHU. Technology for countering dynamic multi-target motion control using distributed drone swarm systems [J]. Systems Engineering and Electronics, 2025, 47(11): 3765-3778. |
| [4] | Guhao SUN, Zhongze CAI, Qingshuang ZENG. Fixed-time distributed tracking and control of multi-agent formation weighted centroid [J]. Systems Engineering and Electronics, 2024, 46(12): 4165-4172. |
| [5] | Duo ZHENG, Yu HAN, Tianyu LU, Zhichen CHU. Multi aircraft cooperative guidance technology considering collision avoidance constraint task allocation [J]. Systems Engineering and Electronics, 2023, 45(9): 2873-2883. |
| [6] | Guixiang ZHAO, Chenxu WANG, Heping WANG, Yunmiao LI. Local path planning for unmanned surface vehicle using improved velocity obstacle method [J]. Systems Engineering and Electronics, 2023, 45(12): 3975-3983. |
| [7] | Tong HAN, Andi TANG, Huan ZHOU, Dengwu XU, Lei XIE. Multiple UAV cooperative path planning based on LASSA method [J]. Systems Engineering and Electronics, 2022, 44(1): 233-241. |
| [8] | Xin LYU, Xiaodong MU, Jun ZHANG. Multi-threshold image segmentation based on improved sparrow search algorithm [J]. Systems Engineering and Electronics, 2021, 43(2): 318-327. |
| [9] | Daidai CHEN, Wanyou LI. Local path planning algorithm for USV with towed cable [J]. Systems Engineering and Electronics, 2020, 42(9): 1988-1994. |
| [10] | Yiyi YIN, Xiaofang WANG, Zhen TIAN, Zhuping WANG. Multi-missile formation method based on prescribed performance control [J]. Systems Engineering and Electronics, 2020, 42(12): 2847-2858. |
| [11] | SONG Min, DAI Jing, KONG Tao. UAV autonomous collision avoidance control method based on NMPC [J]. Systems Engineering and Electronics, 2019, 41(9): 2092-2099. |
| [12] | LIAN Qingpo, WANG Hongjian, YUAN Jianya, GAO Na, HU Wenyue. USV cluster collision avoidance based on particle swarm optimization algorithm [J]. Systems Engineering and Electronics, 2019, 41(9): 2034-2040. |
| [13] | CHEN Tiande, HUANG Yanyan, ZHANG Yongliang. Non-trap dynamic path planning based on collision risk [J]. Systems Engineering and Electronics, 2019, 41(11): 2496-2506. |
| [14] | SUN Yan-chao, CHEN Liang-ming, LI Chuan-jiang, MA Guang-fu. Adaptive neural-network coordinated tracking control of multiple Euler-Lagrange systems with communication delays [J]. Systems Engineering and Electronics, 2016, 38(5): 1132-. |
| [15] | FU Xiao-wei, CUI Hong-jie, GAO Xiao-guang. Distributed solving method of multi-UAV rendezvous problem [J]. Systems Engineering and Electronics, 2015, 37(8): 1797-1802. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||