Systems Engineering and Electronics ›› 2026, Vol. 48 ›› Issue (1): 132-143.doi: 10.12305/j.issn.1001-506X.2026.01.13
• Systems Engineering • Previous Articles Next Articles
Two-layered path planning for unmanned aerial vehicle swarm in three-dimensional dynamic environment
Zeyu LU1( ), Yao WANG2, Weinan WU1,*(), Yiming SUN3, Chunlin GONG1
), Yao WANG2, Weinan WU1,*(), Yiming SUN3, Chunlin GONG1
- 1. School of Astronautics,Northwestern Polytechnical University,Xi’an 710072,China
2. The Overall Design Institute of Academy of Hubei Aerospace Technology,Wuhan 430048,China
3. Northwest Institute of Mechanical & Electrical Engineering,Xianyang 712099,China
-
Received:2024-05-15Online:2026-01-25Published:2026-02-11 -
Contact:Weinan WU E-mail:zeyulu@mail.nwpu.edu.cn;wuweinan@nwpu.edu.cn
CLC Number:
Cite this article
Zeyu LU, Yao WANG, Weinan WU, Yiming SUN, Chunlin GONG. Two-layered path planning for unmanned aerial vehicle swarm in three-dimensional dynamic environment[J]. Systems Engineering and Electronics, 2026, 48(1): 132-143.
share this article

Fig.1
Two-layered path planning structure"
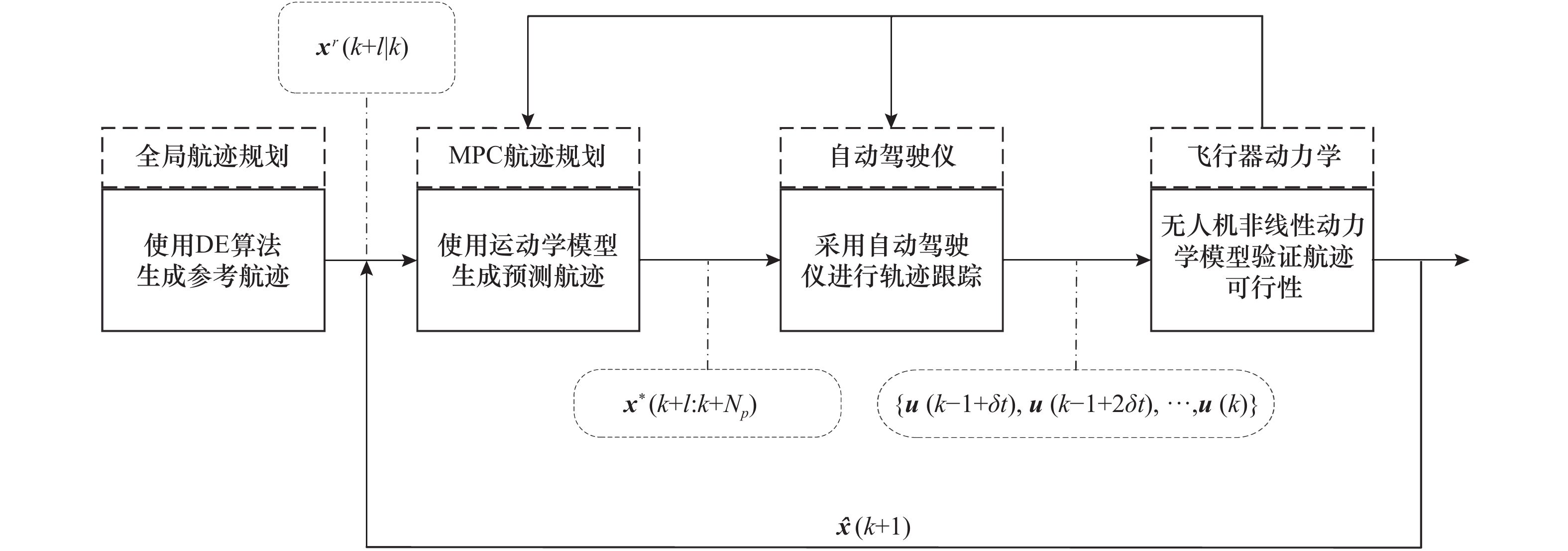
Table 1
Parameters of unmanned aerial vehicle"
| 参数 | 数值 |
| 质量 | |
| 翼展 | 9.14 |
| 机翼面积 | 27.87 |
| 空速 | 220~260 |
| 主惯性矩 | |
| 主惯性矩 | |
| 主惯性矩 | |
| 惯性积 | |
| 副翼最大偏转 | |
| 升降舵最大偏转 | |
| 最大舵偏转 | |
| 通信范围 | 10 |
Table 2
Parameters of algorithm setting"
| 参数 | 数值 |
| 最大飞行高度 | |
| 最小飞行高度 | 10.0 |
| 最大俯仰角 | 20 |
| 最大水平转弯角 | 60 |
| 高度安全裕度 | 260.0 |
| 安全距离 | 60.0 |
| 种群数 | 50 |
| 最大迭代次数 | 300 |
| 预测时域 | 25 |
| 控制时域 | 3 |
| 仿真步长 | 1 |
Table 3
Unmanneal aerial vehicle swarm initial parameter information"
| 集群 | 无人机编号 | 起点 | 初始航向角/rad | ||
| x/km | y/km | z/km | |||
| 1 | 1 | 8 | 14.5 | 3.7 | 0 |
| 2 | 8 | 15.5 | 3.7 | 0 | |
| 3 | 8 | 16.5 | 3.7 | 0 | |
| 4 | 8 | 17.5 | 3.7 | 0 | |
| 5 | 8 | 18.5 | 3.7 | 0 | |
| 6 | 8 | 19.5 | 3.7 | 0 | |
| 7 | 8 | 20.5 | 3.7 | 0 | |
| 8 | 8 | 21.5 | 3.7 | 0 | |
| 9 | 8 | 22.5 | 3.7 | 0 | |
| 10 | 8 | 23.5 | 3.7 | 0 | |
| 2 | 1 | 10.2 | 8.5 | 2.1 | |
| 2 | 11.2 | 8.5 | 2.1 | ||
| 3 | 12.2 | 8.5 | 2.1 | ||
| 4 | 13.2 | 8.5 | 2.1 | ||
| 5 | 14.2 | 8.5 | 2.1 | ||
| 6 | 15.2 | 8.5 | 2.1 | ||
| 7 | 16.2 | 8.5 | 2.1 | ||
| 8 | 17.2 | 8.5 | 2.1 | ||
| 9 | 18.2 | 8.5 | 2.1 | ||
| 10 | 19.2 | 8.5 | 2.1 | ||
| 11 | 20.2 | 8.5 | 2.1 | ||
| 12 | 21.2 | 8.5 | 2.1 | ||
| 13 | 22.2 | 8.5 | 2.1 | ||
Table 4
Unmanned aerial vehicle swarm target point information km"
| 集群 | 目标点 | ||
| 1 | 64.6 | 18 | 2.8 |
| 2 | 16.2 | 53.9 | 3 |
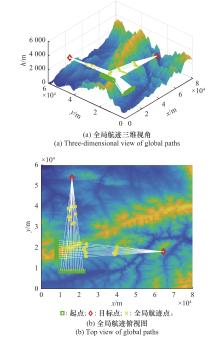
Fig.2
Global path planning of unmanned aerial vehicle swarm"
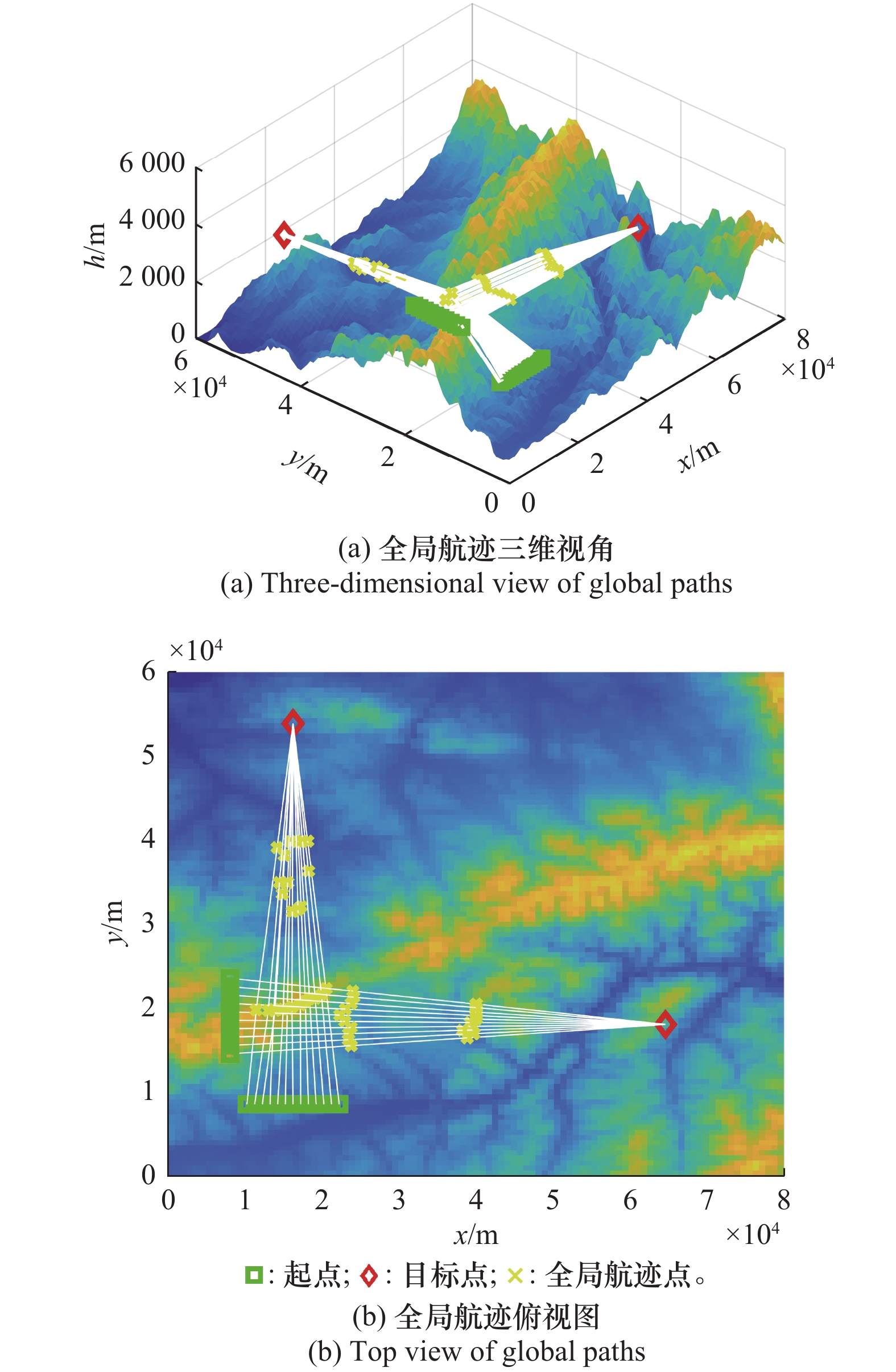

Fig.3
Unmanned aerial vehicle swarm local path planning"


Fig.4
The shortest distances from the unmanned aerial vehicle swarm to the moving fleet and the sudden obstacle"
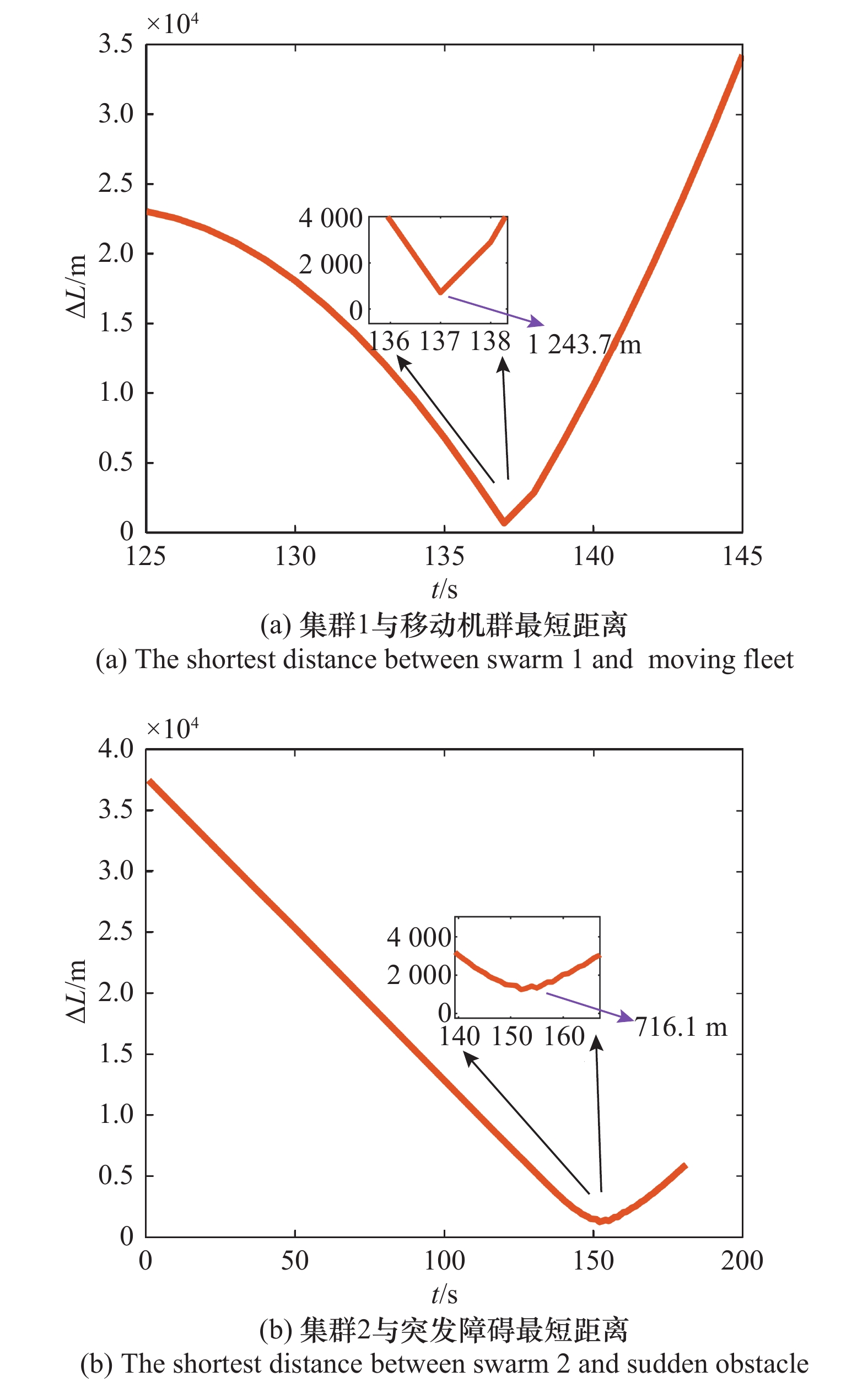
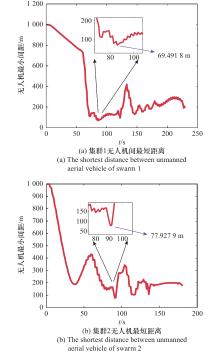
Fig.5
The shortest distance between unmanned aerial vehicle during flight"
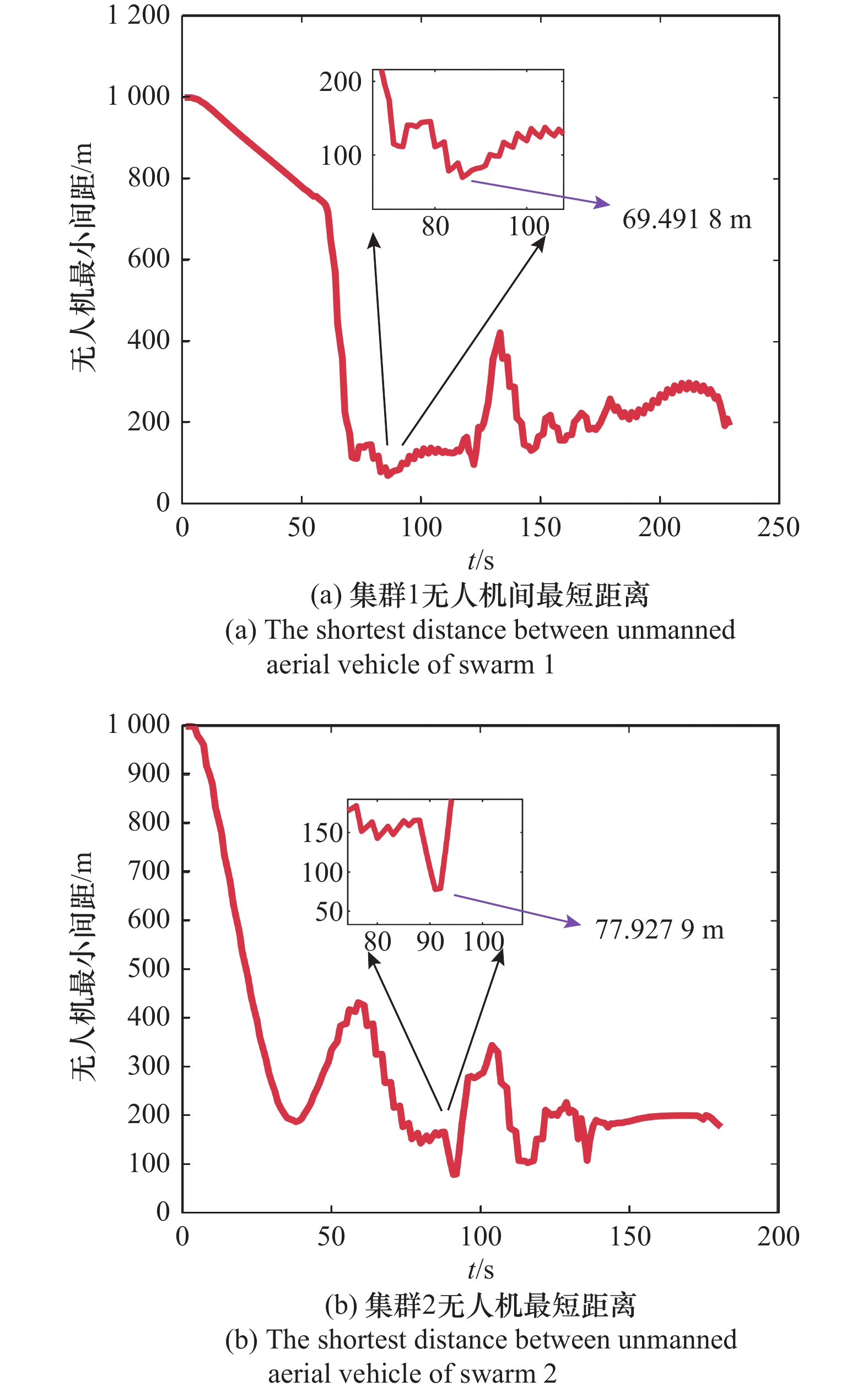
Fig.6
Unmanned aerial vehicle swarm planning tracking comparison"

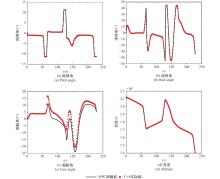
Fig.7
Tracking results of each parameter in case 2"
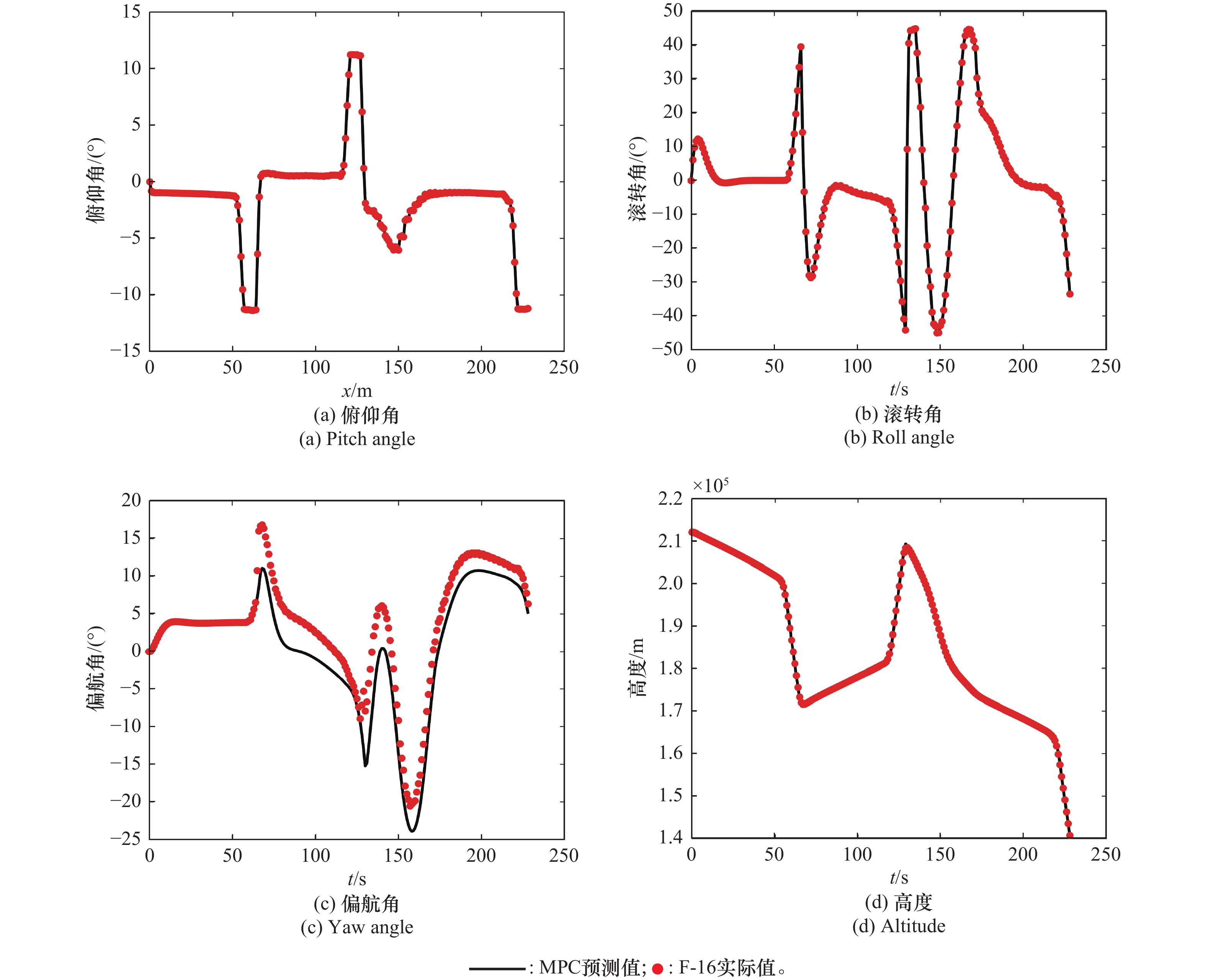
Table 5
Running time of single-layer planning and two-layer planning s"
| 仿真序号 | 单层规划运行时间 | 双层规划运行时间 |
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 |
| 1 | ZHANG H, XIN B, DOU L H, et al. A review of cooperative path planning of an unmanned aerial vehicle group[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21 (12): 1671- 1694. |
| 2 | 杨旭, 王锐, 张涛. 面向无人机集群路径规划的智能优化算法综述[J]. 控制理论与应用, 2020, 37(11): 2291−2302. |
| YANG X, WANG R, ZHANG T. Review of unmanned aerial vehicle swarm path planning based on intelligent optimization[J]. Control Theory & Applications, 2020, 37(11): 2291−2302. | |
| 3 | 张堃, 华帅, 袁斌林, 等. 基于Multi-Agent的无人机集群体系自主作战系统设计[J]. 系统工程与电子技术, 2024, 46 (4): 1273- 1286. |
| ZHANG K, HUA S, YUAN B L, et al. Design of autonomous combat system of unmanned cluster system based on multi-agent[J]. Systems Engineering and Electronics, 2024, 46 (4): 1273- 1286. | |
| 4 | LING H F, LUO L C, CHEN H S, et al. Modelling and simulation of distributed UAV swarm cooperative planning and perception[J]. International Journal of Aerospace Engineering, 2021, 2021 (2) |
| 5 | 赵超轮, 戴邵武, 赵国荣, 等. 基于分布式模型预测控制的无人机编队控制[J]. 控制与决策, 2022, 37 (7): 1763- 1771. |
| ZHAO C L, DAI S W, ZHAO G R, et al. Formation control of multi-UAV based on distributed model predictive control algorithm[J]. Control and Decision, 2022, 37 (7): 1763- 1771. | |
| 6 |
, et al. Adaptive path following control for miniature unmanned aerial vehicle confined to three-dimensional Dubins path: from take-off to landing[J]. ISA Transactions, 2023, 143, 156- 167.
doi: 10.1016/j.isatra.2023.09.021 |
| 7 | 伍友利, 叶圣涛, 方洋旺, 等. 固定翼无人机群的集群和避障控制[J]. 国防科技大学学报, 2019, 41(5): 103−110. |
| WU Y L, YE S T, FANG Y W, et al. Flocking and obstacles avoidance for fixed-wing unmanned aerial vehicle swarm[J]. Journal of National University of Defense Technology, 2019, 41(5): 103−110. | |
| 8 |
, et al. Path planning for UAVs formation reconfiguration based on Dubins trajectory[J]. Journal of Central South University, 2018, 25 (11): 2664- 2676.
doi: 10.1007/s11771-018-3944-z |
| 9 | YANG J, XI J X, WANG C, et al. Multi-base multi-UAV cooperative patrol route planning novel method[C]//Proc. of the 33rd Youth Academic Annual Conference of Chinese Association of Automation, 2018. |
| 10 |
H L. Sampling-based tour generation of arbitrarily oriented Dubins sensor platforms[J]. Journal of Aerospace Information Systems, 2019, 16 (5): 168- 186.
doi: 10.2514/1.I010683 |
| 11 | ZHANG B, DUAN H B. Three-dimensional path planning for uninhabited combat aerial vehicle based on predator-prey pigeon-inspired optimization in dynamic environment[J]. IEEE/ACM Trans. on Computational Biology and Bioinformatics, 2015, 14 (1): 97- 107. |
| 12 |
GE F W, LI K, HAN Y, et al. Path planning of UAV for oilfield inspections in a three-dimensional dynamic environment with moving obstacles based on an improved pigeon-inspired optimization algorithm[J]. Applied Intelligence, 2020, 50, 2800- 2817.
doi: 10.1007/s10489-020-01650-2 |
| 13 | 吴健发, 王宏伦, 王延祥, 等. 无人机反应式扰动流体路径规划[J]. 自动化学报, 2023, 49(2): 272−287. |
| WU J F, WANG H L, WANG Y X, et al. UAV reactive interfered fluid path planning[J]. Acta Automatica Sinica, 2023, 49(2): 272−287. | |
| 14 |
ZHANG D F, DUAN H B. Social-class pigeon-inspired optimization and time stamp segmentation for multi-UAV cooperative path planning[J]. Neurocomputing, 2018, 313, 229- 246.
doi: 10.1016/j.neucom.2018.06.032 |
| 15 |
, et al. Collision free 4D path planning for multiple UAVs based on spatial refined voting mechanism and PSO approach[J]. Chinese Journal of Aeronautics, 2019, 32 (6): 1504- 1519.
doi: 10.1016/j.cja.2019.03.026 |
| 16 |
SHAO Z, YAN F, ZHOU Z, et al. Path planning for multi-UAV formation rendezvous based on distributed cooperative particle swarm optimization[J]. Applied Sciences, 2019, 9 (13): 2621.
doi: 10.3390/app9132621 |
| 17 | YAN S Q, LIU W D, YANG P, et al. Optimization of UAV cooperative path planning mathematical model based on personalized multigroup sparrow search algorithm in complex environment[J]. Journal of Function Spaces, 2022. DOI: https://doi.org/10.1155/2022/2521737. |
| 18 | 周维, 过学迅, 裴晓飞, 等. 基于RRT与MPC的智能车辆路径规划与跟踪控制研究[J]. 汽车工程, 2020, 42 (9): 1151- 1158. |
| , et al. Study on path planning and tracking control for intelligent vehicle based on RRT and MPC[J]. Automotive Engineering, 2020, 42 (9): 1151- 1158. | |
| 19 | 余伶俐, 魏亚东, 霍淑欣. 基于MCPDDPG的智能车辆路径规划方法及应用[J]. 控制与决策, 2021, 36 (4): 835- 846. |
| S X. The method and application of intelligent vehicle path planning based on MCPDDPG[J]. Control and Decision, 2021, 36 (4): 835- 846. | |
| 20 |
李相民, 薄宁, 代进进. 基于模型预测控制的多无人机避碰航迹规划研究[J]. 西北工业大学学报, 2017, 35 (3): 513- 522.
doi: 10.3969/j.issn.1000-2758.2017.03.024 |
|
J J. Study on collision avoidance path planning for multi-UAVs based on model predictive control[J]. Journal of Northwestern Polytechnical University, 2017, 35 (3): 513- 522.
doi: 10.3969/j.issn.1000-2758.2017.03.024 |
|
| 21 |
LUIS C E, VUKOSAVLJEV M, SCHOELLIG A P. Online trajectory generation with distributed model predictive control for multi-robot motion planning[J]. IEEE Robotics and Automation Letters, 2020, 5 (2): 604- 611.
doi: 10.1109/LRA.2020.2964159 |
| 22 | SORIA E, SCHIANO F, FLOREANO D. Distributed predictive drone swarms in cluttered environments[J]. IEEE Robotics and Automation Letters, 2021, 7 (1): 73- 80. |
| 23 |
, et al. Multi-UAV trajectory planning during cooperative tracking based on a fusion algorithm integrating MPC and standoff[J]. Drones, 2023, 7 (3): 196.
doi: 10.3390/drones7030196 |
| 24 | 宋超, 李波, 马云红, 等. 基于优化 A* 和 MPC 融合算法的三维无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(12): 3995−4004. |
| SONG C, LI B, MA Y H. 3D UAV trajectory planning based on optimized A* and MPC fusion algorithm[J]. Systems Engineering and Electronics, 2023, 45(12): 3995−4004. | |
| 25 |
STORN R, PRICE K. Differential evolution—a simple and efficient heuristic for global optimization over continuous spaces[J]. Journal of Global Optimization, 1997, 11, 341- 359.
doi: 10.1023/A:1008202821328 |
| 26 | PAN Z H, ZHANG C X, XIA Y Q, et al. An improved artificial potential field method for path planning and formation control of the multi-UAV systems[J]. IEEE Trans. on Circuits and Systems II: Express Briefs, 2021, 69 (3): 1129- 1133. |
| 27 |
, et al. Model predictive path tracking control for automated road vehicles: a review[J]. Annual Reviews in Control, 2023, 55, 194- 236.
doi: 10.1016/j.arcontrol.2022.11.001 |
| 28 |
MAYNE D. An apologia for stabilising terminal conditions in model predictive control[J]. International Journal of Control, 2013, 86 (11): 2090- 2095.
doi: 10.1080/00207179.2013.813647 |
| 29 |
ZHANG L, ZHANG Y J, LI Y F. Path planning for indoor mobile robot based on deep learning[J]. Optik, 2020, 219, 165096.
doi: 10.1016/j.ijleo.2020.165096 |
| 30 | JOSE M M, RUDY R N. Distributed model predictive control made easy[M]. Netherlands: Springer, 2014. |
| 31 | OWEN M, BEARD R W, MCLAIN T W. Implementing dubins airplane paths on fixed-wing UAVs*[M]. Dordrecht: Springer, 2015. |
| 32 | MORELLI E A. Global nonlinear parametric modelling with application to F-16 aerodynamics[C]//Proc. of the American Control Conference, 1998. |
| 33 | STEVENS B L, LEWIS F L, JOHNSON E N. Aircraft control and simulation: dynamics, controls design, and autonomous systems[M]. New Jersey: John Wiley & Sons, 2015. |
| [1] | Zhao YANG, Jinbiao HU, Yan WANG, Hongbiao QI. UAV coverage path planning for mountain patrol considering different takeoff and landing nests [J]. Systems Engineering and Electronics, 2025, 47(8): 2622-2631. |
| [2] | Xiaozhen YAN, Xinyue ZHOU, Qinghua LUO. Improved A-star algorithm for dynamic path planning of unmanned ships [J]. Systems Engineering and Electronics, 2025, 47(7): 2314-2328. |
| [3] | Junchao TANG, Chunhe HU. Complete coverage path planning for UAVs in 3D terrain and wind field environment [J]. Systems Engineering and Electronics, 2025, 47(7): 2349-2356. |
| [4] | Yijie LIU, Bin JIANG, Yajie MA, Wenbo LI, Chengrui LIU. Collision avoidance path planning and re-planning for USV formation [J]. Systems Engineering and Electronics, 2025, 47(6): 1964-1974. |
| [5] | Wei CHEN, Congqing WANG, Qiang ZENG, Zhan LI. UAV coverage path planning for aircraft surface visual inspection [J]. Systems Engineering and Electronics, 2025, 47(4): 1206-1213. |
| [6] | Ze GENG, Yanyan HUANG, Han ZHANG. UAV swarm anti-artillery search path planning based on artillery transfer path prediction [J]. Systems Engineering and Electronics, 2025, 47(4): 1222-1234. |
| [7] | Wenzhao YU, Jingchao QIAO, Zhe DU, Zhukai XING, Xinyuan WAN. Multi-USV cooperative task planning based on clustering optimization algorithm [J]. Systems Engineering and Electronics, 2025, 47(11): 3708-3720. |
| [8] | Jialong ZHANG, Di ZHAO, Pu ZHANG, Lei YE. Adaptive tracking control for UAV swarm with communication constraint [J]. Systems Engineering and Electronics, 2025, 47(10): 3401-3410. |
| [9] | Yuqi XIA, Yanyan HUANG, Qia CHEN. Path planning for unmanned vehicle reconnaissance based on deep Q-network [J]. Systems Engineering and Electronics, 2024, 46(9): 3070-3081. |
| [10] | Bowen FEI, Weidong BAO, Daqian LIU, Xiaomin ZHU. Air-ground cooperative autonomous task allocation method for dynamic target search and strike [J]. Systems Engineering and Electronics, 2024, 46(7): 2346-2358. |
| [11] | Jie LI, Yuejin TAN. Operation loop recommendation method based on integrated improved ant colony algorithm [J]. Systems Engineering and Electronics, 2024, 46(6): 2002-2012. |
| [12] | Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755. |
| [13] | Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm [J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. |
| [14] | Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG. Research on UAV path planning method based on the multi-precision planning windows [J]. Systems Engineering and Electronics, 2024, 46(5): 1767-1776. |
| [15] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||