Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (10): 3401-3410.doi: 10.12305/j.issn.1001-506X.2025.10.24
• Guidance, Navigation and Control • Previous Articles
Adaptive tracking control for UAV swarm with communication constraint
Jialong ZHANG1, Di ZHAO2, Pu ZHANG3, Lei YE4,*
- 1. College of Aerospace Science, National University of Defense Technology, Changsha 410073, China
2. Academy of Mathematics and Systems Science,Chinese Academy of Sciences,Beijing 100190,China
3. School of Automation and Information Engineering,Xi’an University of Technology,Xi’an 710048,China
4. Test Center, National University of Defense Technology, Xi’an 710106, China
-
Received:2024-05-23Online:2025-10-25Published:2025-10-23 -
Contact:Lei YE
CLC Number:
Cite this article
Jialong ZHANG, Di ZHAO, Pu ZHANG, Lei YE. Adaptive tracking control for UAV swarm with communication constraint[J]. Systems Engineering and Electronics, 2025, 47(10): 3401-3410.
share this article

Fig.1
Swarm formation tracking control structure"

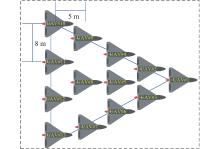
Fig.2
Schematic diagram of “leader-following” structure of unmanned aerial vehicle formation"
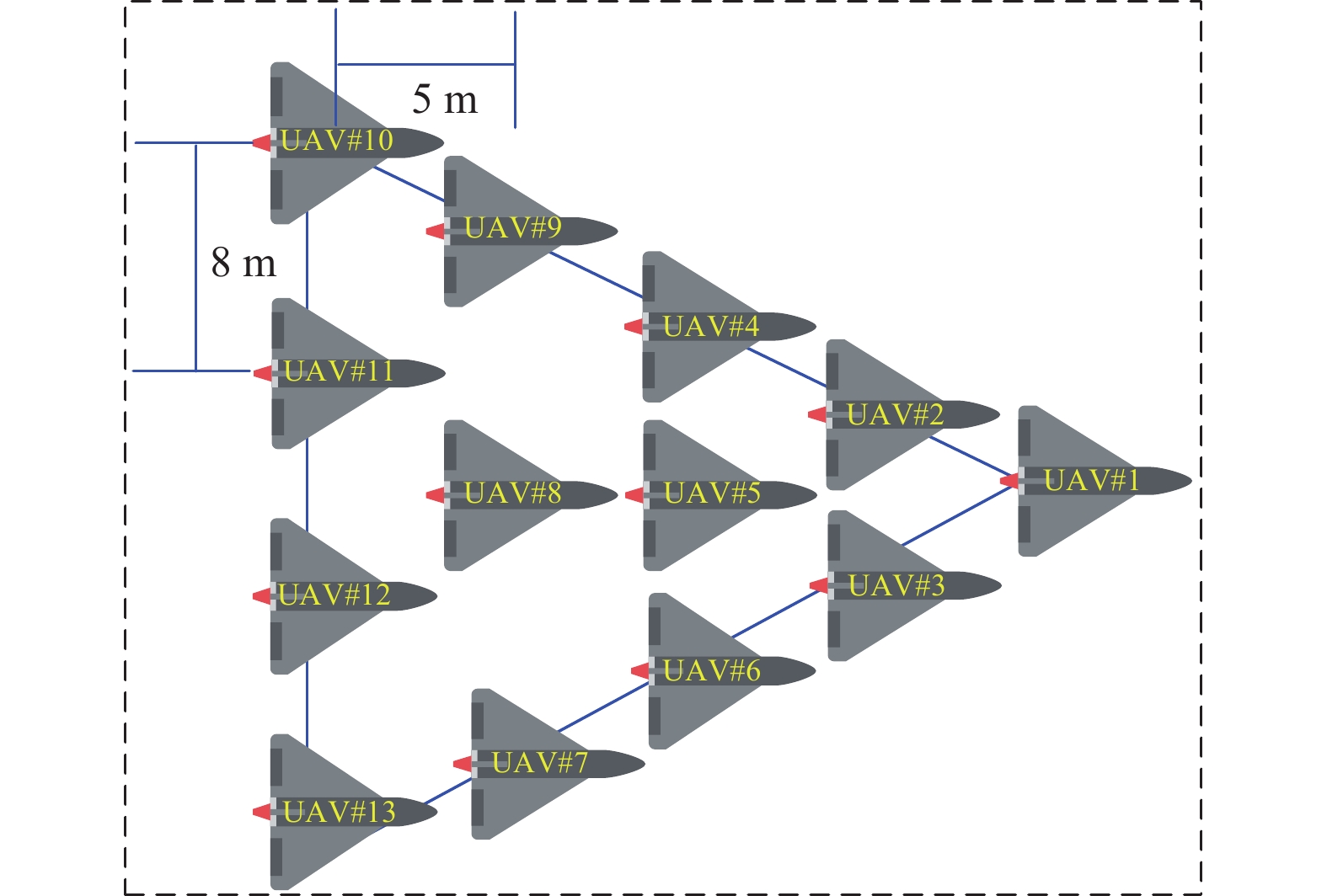
Table 1
Related parameters of autopilot model"
| 无人机 | |||
| UAV#1 | |||
| UAV#2 | |||
| UAV#3 | |||
| UAV#4 | |||
| UAV#5 | |||
| UAV#6 | |||
| UAV#7 | |||
| UAV#8 | |||
| UAV#9 | |||
| UAV#10 | |||
| UAV#11 | |||
| UAV#12 | |||
| UAV#13 |
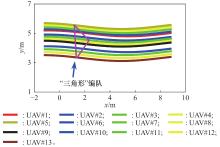
Fig.3
Multi-unmanned aerial vehicle formation reconfigured path curve"
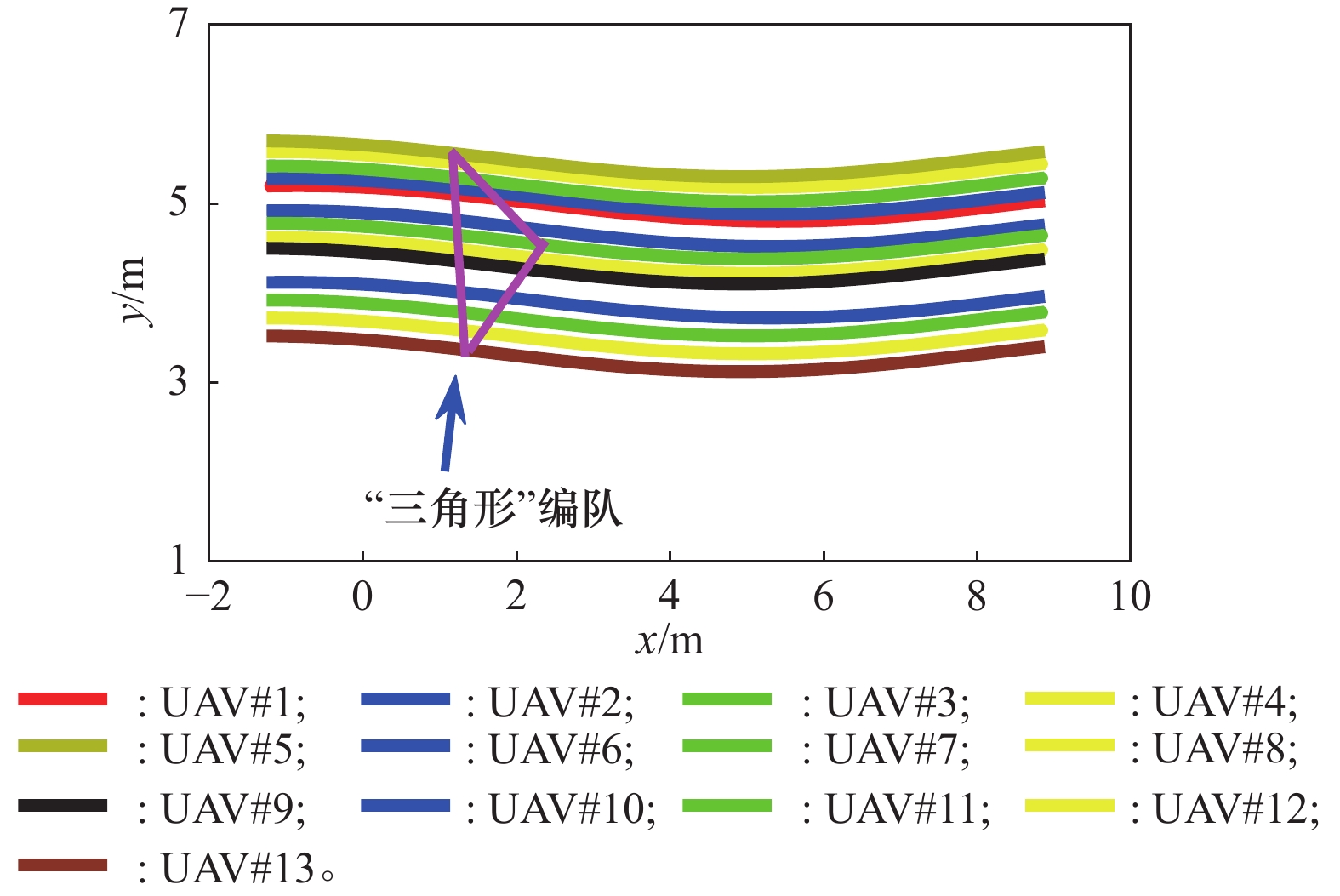
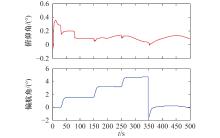
Fig.4
Attitude curve of unmanned aerial vehicle motion"
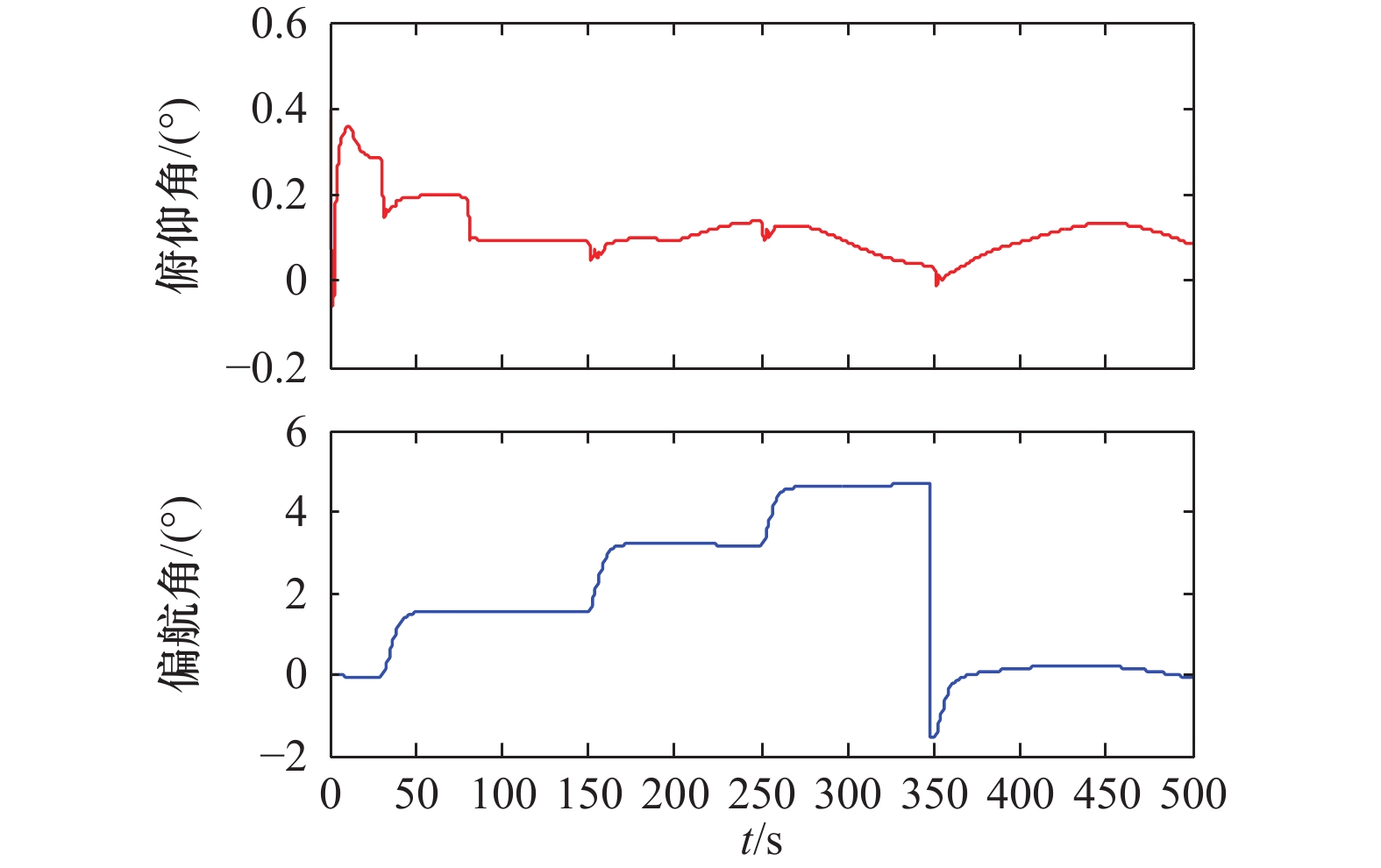
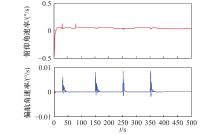
Fig.5
Unmanned aerial vehicle angular rate change curve"
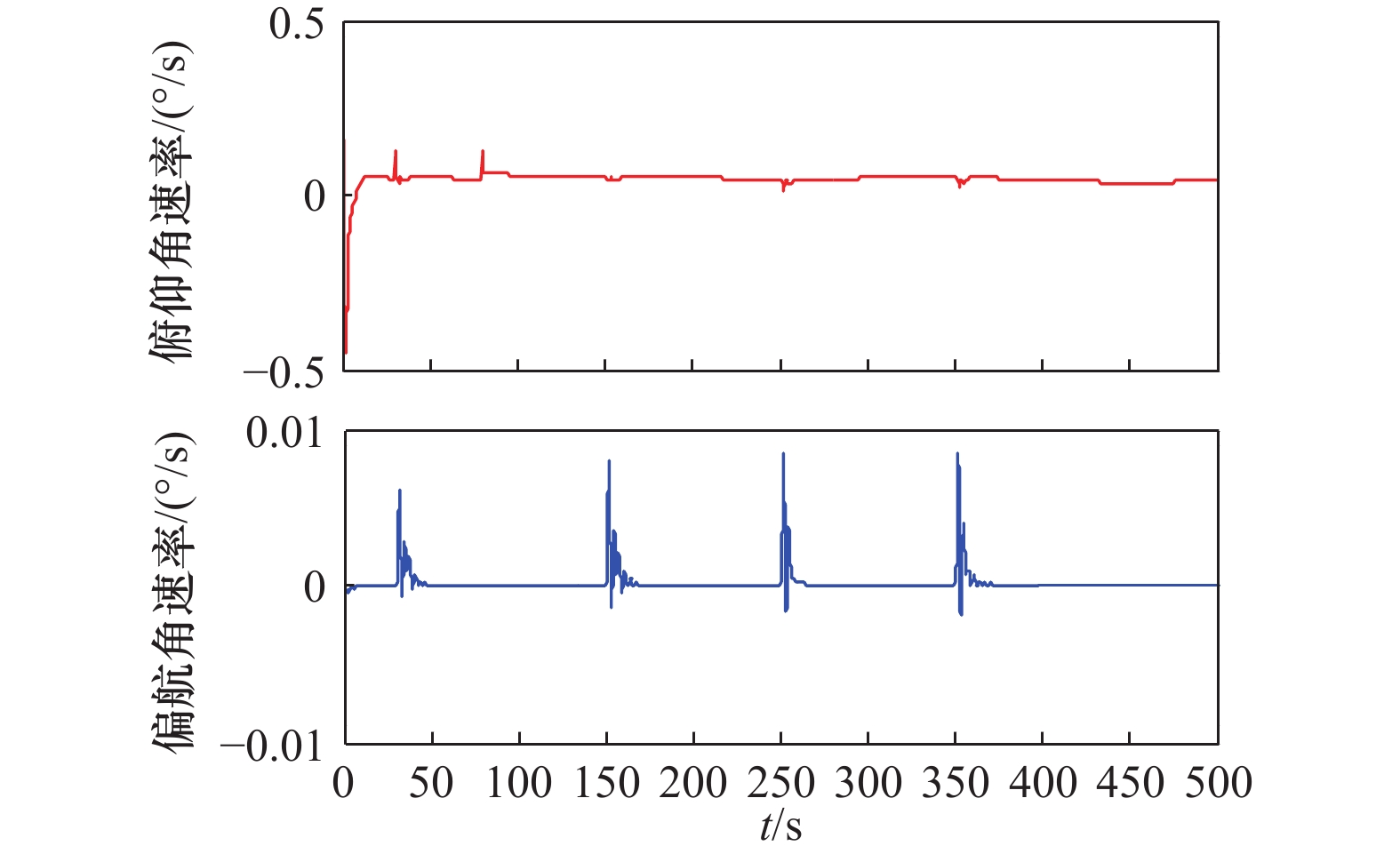
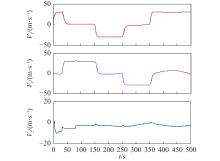
Fig.6
Unmanned aerial vehicle velocity change curve in the three directions"
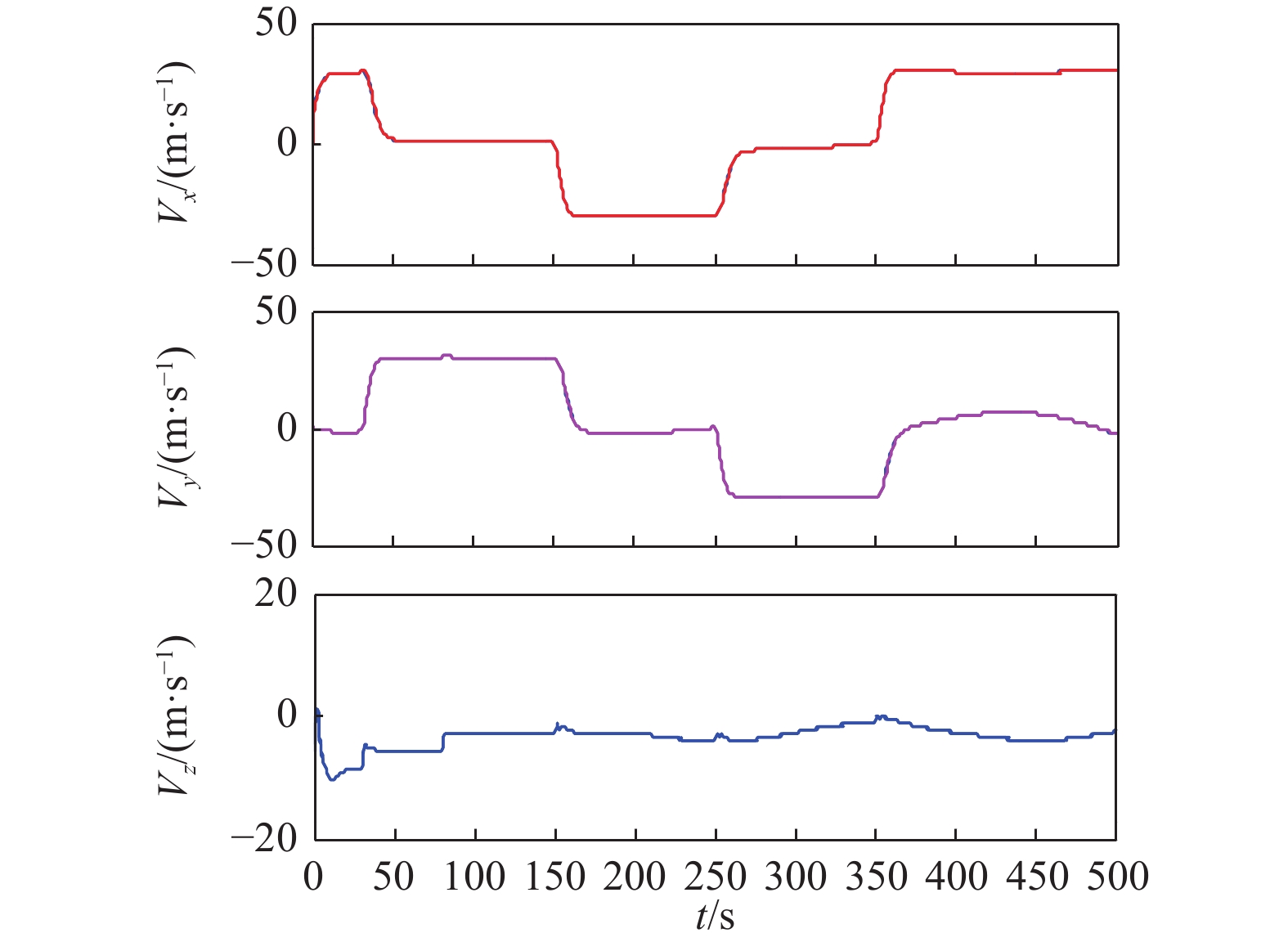
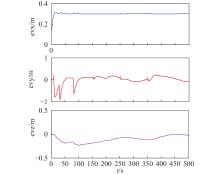
Fig.7
Unmanned aerial vehicle velocity tracking error curve in the three directions"
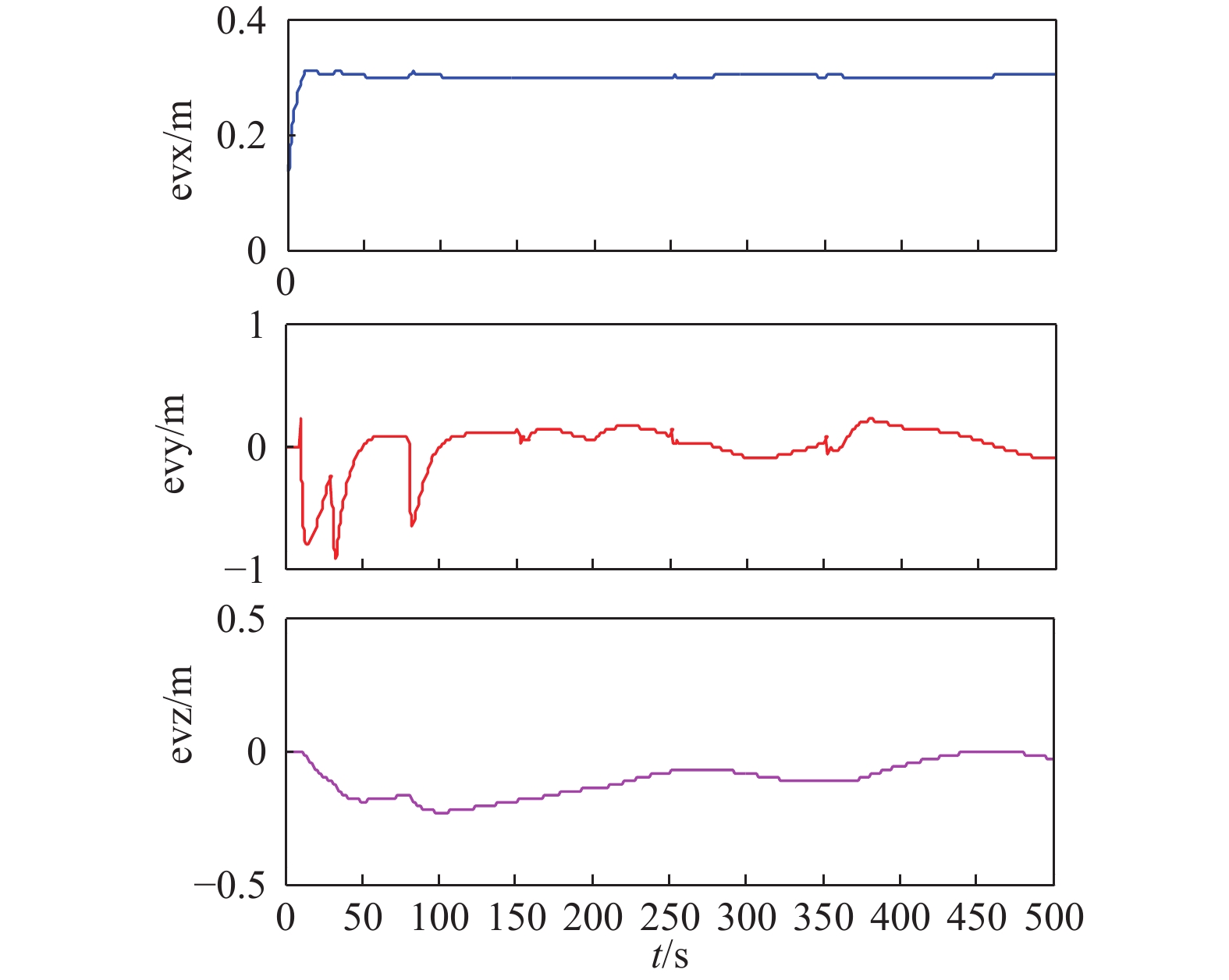
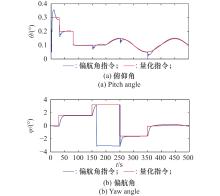
Fig.8
Quantification command angle curve"
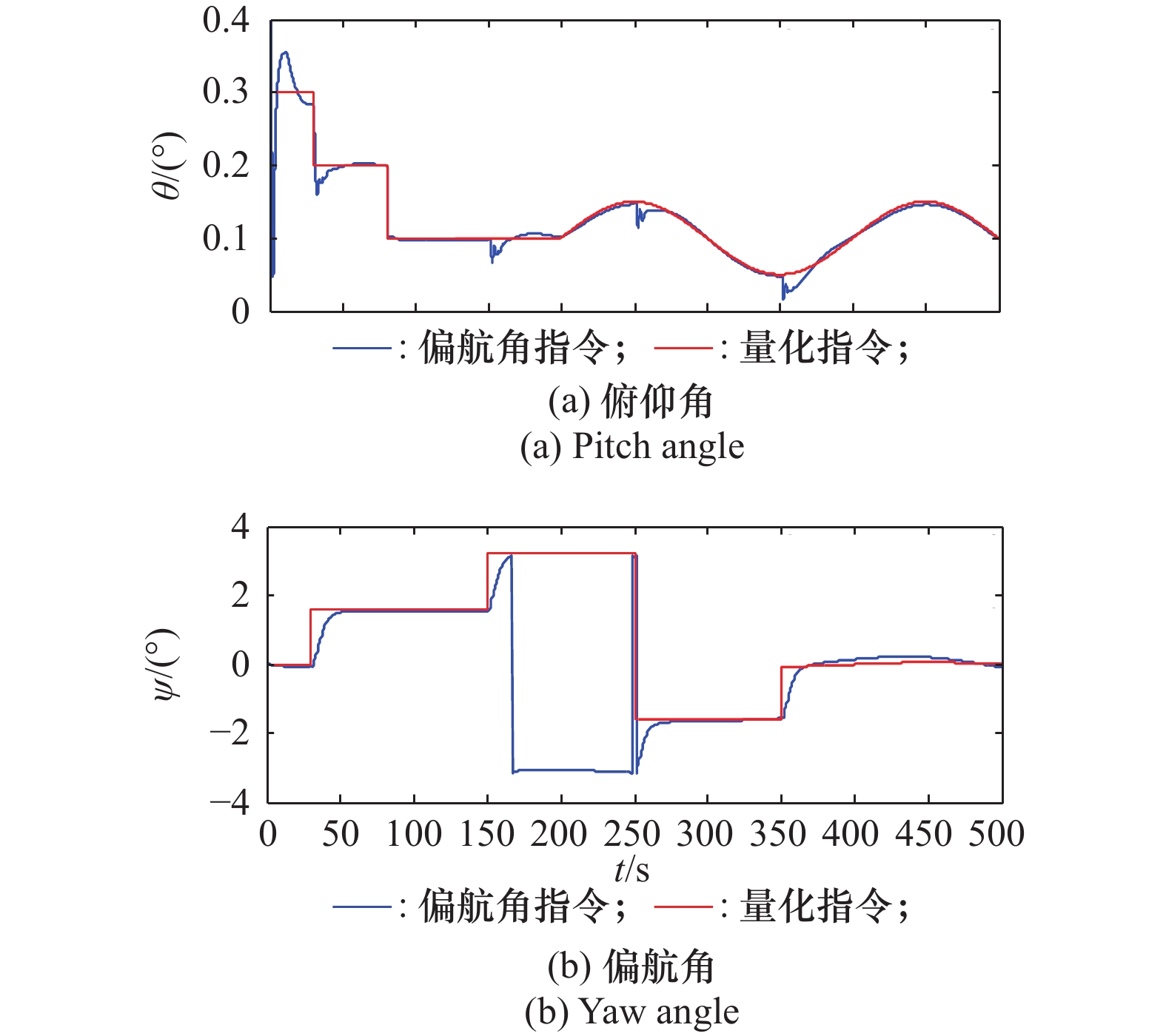
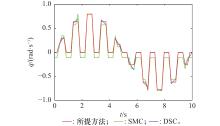
Fig.9
Pitch angle rate curve for unmanned aerial vehicle with three control methods"
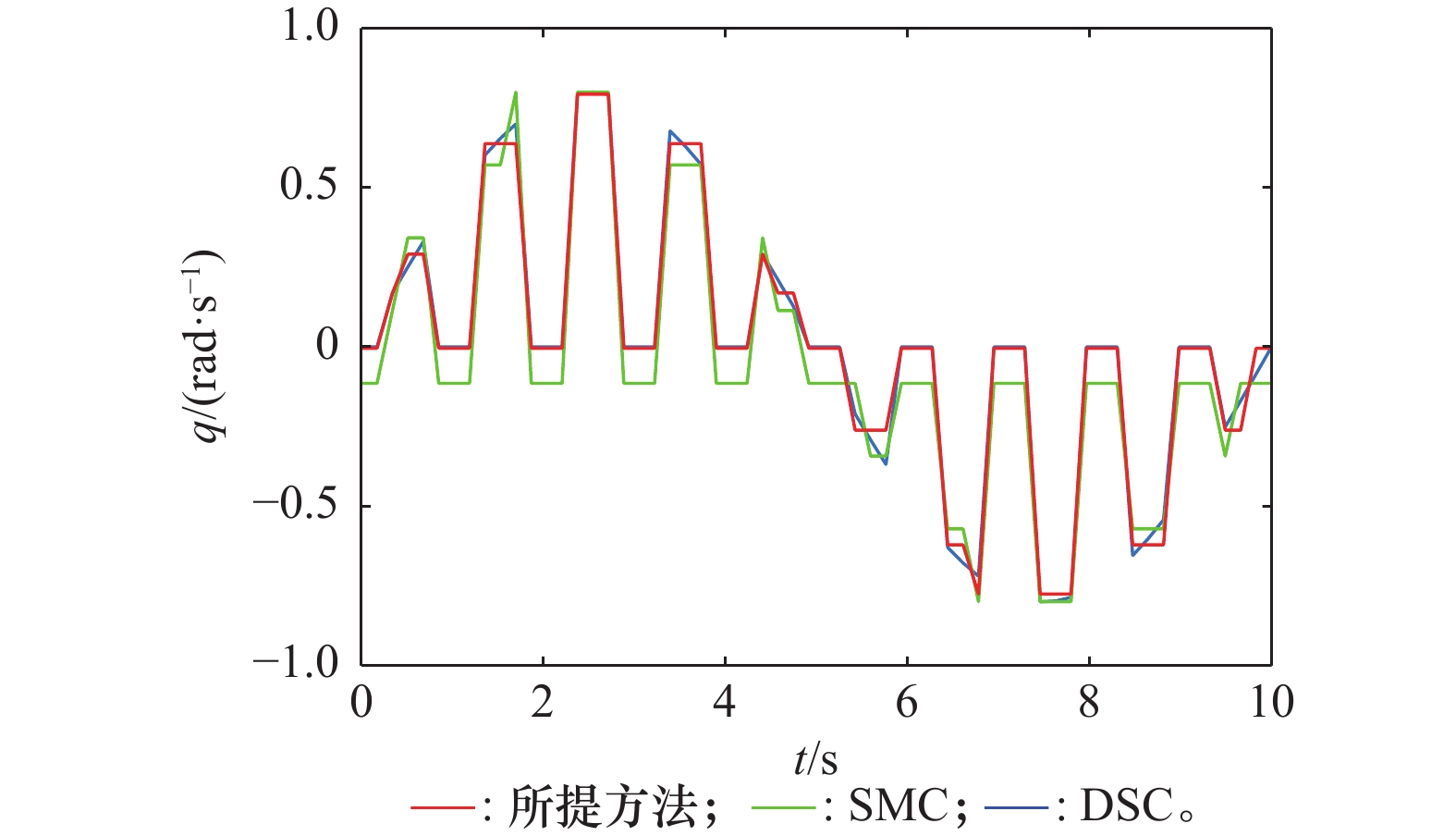
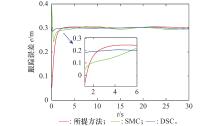
Fig.10
Tracking error variation curve of unmanned aerial vehicle under three methods"
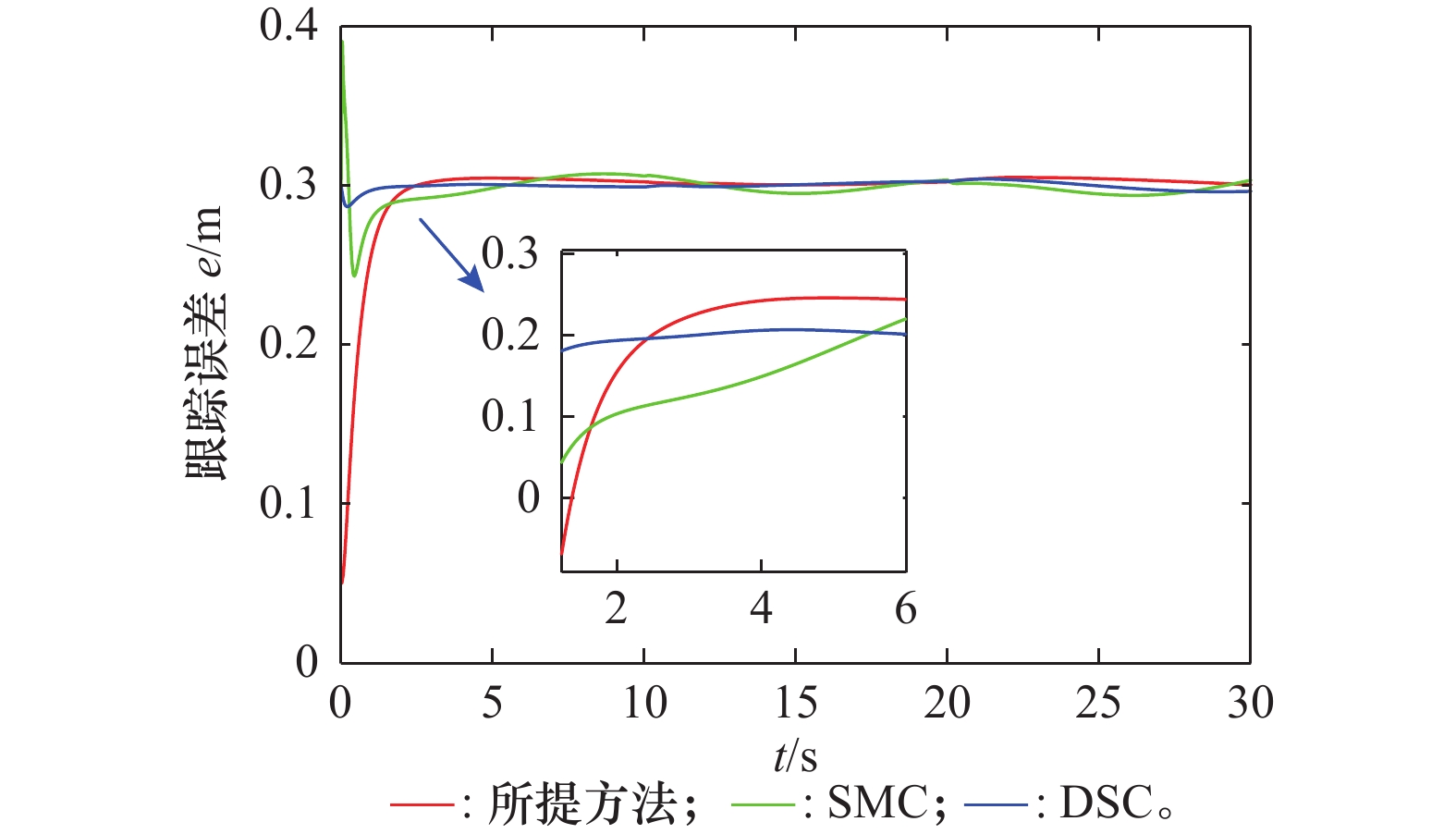
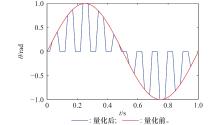
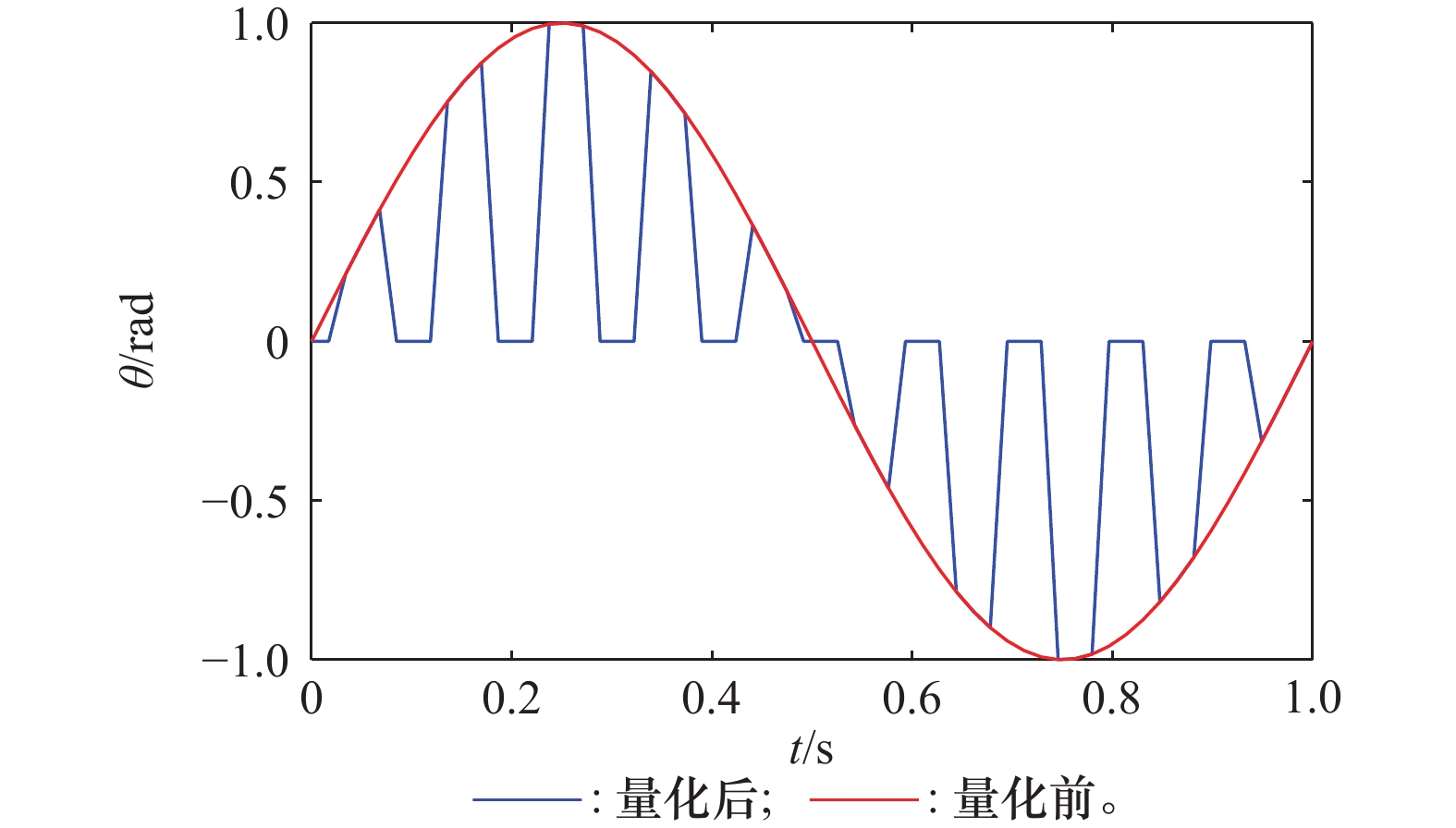
Fig.11
Pitch angle variation curve of unmanned aerial vehicle before and after quantization of signal"
| 1 |
KLUGEL M, MAMDUHI M, AYAN O, et al. Joint cross-layer optimization in real-time networked control systems[J]. IEEE Trans. on Control of Network Systems, 2020, 7 (4): 1903- 1915.
doi: 10.1109/TCNS.2020.3011847 |
| 2 |
CHANG B, TANG W, YAN X Y, et al. Integrated scheduling of sensing, communication, and control for mmWave/THz communications in cellular connected UAV networks[J]. IEEE Journal on Selected Areas in Communications, 2022, 40 (7): 2103- 2113.
doi: 10.1109/JSAC.2022.3157366 |
| 3 | LIU T, JIANG Z P. Event-triggered control of nonlinear systems with state quantization[J]. IEEE Trans. on Automatic Control, 2019, 64 (2): 797- 803. |
| 4 |
ZHOU J, WEN C Y, WANG W, et al. Adaptive back stepping control of nonlinear uncertain systems with quantized states[J]. IEEE Trans. on Automatic Control, 2019, 64 (11): 4756- 4763.
doi: 10.1109/TAC.2019.2906931 |
| 5 |
REN W, XIONG J L. Quantized feedback stabilization of nonlinear systems with external disturbance[J]. IEEE Trans. on Automatic Control, 2018, 63 (9): 3167- 3172.
doi: 10.1109/TAC.2018.2791461 |
| 6 |
LIU Z, WANG F, ZHANG Y, et al. Fuzzy adaptive quantized control for a class of stochastic nonlinear uncertain systems[J]. IEEE Trans. on Cybernetics, 2016, 46 (2): 524- 534.
doi: 10.1109/TCYB.2015.2405616 |
| 7 | 万敏, 阎坤, 瞿有杰, 等. 具有量化输入的小型无人直升机控制[C]//第19届中国系统仿真技术及其应用学术年会论文集, 2018: 288−292. |
| WAN M, YAN K, QU Y J, et al. Small unmanned helicopter control with quantized input[C]//Proc. of the 19th IEEE-China Conference on System Simulation Technology and its Applications, 2018: 288−292. | |
| 8 | 王敏. 具有输入量化的非线性系统自适应输出反馈控制研究[D]. 扬州: 扬州大学, 2020. |
| WANG M. Research on adaptive output feedback control for nonlinear systems with input quantization[D]. Yangzhou: Yangzhou University, 2020. | |
| 9 | WU J, WU Z G, LI J, et al. Practical adaptive fuzzy control of nonlinear pure-feedback systems with quantized nonlinearity input[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2019, 49 (3): 638- 648. |
| 10 |
WANG F, CHEN B, LIN C, et al. Adaptive neural network finite-time output feedback control of quantized nonlinear systems[J]. IEEE Trans. on Cybernetics, 2018, 48 (6): 1839- 1848.
doi: 10.1109/TCYB.2017.2715980 |
| 11 |
LIU W H, HO D W, XU S Y, et al. Adaptive finite-time stabilization of a class of quantized nonlinearly parameterized systems[J]. International Journal of Robust and Nonlinear Control, 2017, 27 (9): 4554- 4573.
doi: 10.1002/rnc.3813 |
| 12 | 齐晓静, 刘文慧. 一类具有输入量化和未知扰动的非线性系统的自适应有限时间动态面控制[J]. 南京信息工程大学学报, 2020, 12 (3): 330- 340. |
| QI X J, LIU W H. Adaptive finite-time dynamic surface control for nonlinear systems with input quantization and unknown disturbances[J]. Journal of Nanjing University of Information Science and Technology, 2020, 12 (3): 330- 340. | |
| 13 |
贾欣婷, 郑柏超, 刘晓光, 等. 具有输入量化的信息物理系统的安全控制[J]. 科学技术与工程, 2020, 20 (31): 12897- 12903.
doi: 10.3969/j.issn.1671-1815.2020.31.032 |
|
JIA X T, ZHENG B C, LIU X G, et al. Security control of cyber-physical systems with input quantization[J]. Science Technology and Engineering, 2020, 20 (31): 12897- 12903.
doi: 10.3969/j.issn.1671-1815.2020.31.032 |
|
| 14 | CHEN K Y, GENG Y H. Adaptive attitude takeover control for spacecraft with input quantization and saturation[C]//Proc. of the IEEE 6th International Conference on Control Science and Systems Engineering, 2020: 167−171. |
| 15 |
ZHANG M, SHI P, MA L H, et al. Quantized feedback control of fuzzy markov jump systems[J]. IEEE Trans. on Cybernetics, 2019, 49 (9): 3375- 3384.
doi: 10.1109/TCYB.2018.2842434 |
| 16 |
LI Y X, YANG G H. Adaptive asymptotic tracking control of uncertain nonlinear systems with input quantization and actuator faults[J]. Automatica, 2016, 72, 177- 185.
doi: 10.1016/j.automatica.2016.06.008 |
| 17 |
ZHOU J, WEN C Y, WANG W. Adaptive control of uncertain nonlinear systems with quantized input signal[J]. Automatica, 2018, 95, 152- 162.
doi: 10.1016/j.automatica.2018.05.014 |
| 18 | HUANG Y, DAI J, YING J. Fixed-time distributed cooperative control for pure feedback multi-agent systems with quantized input saturation and output constraints[C]//Proc. of the 35th Chinese Control and Decision Conference, 2023: 123−128. |
| 19 |
HU Q L, SHAO X D, GUO L. Adaptive fault-tolerant attitude tracking control of spacecraft with prescribed performance[J]. IEEE/ASME Trans. on Mechatronics, 2018, 23 (1): 331- 341.
doi: 10.1109/TMECH.2017.2775626 |
| 20 |
ZHANG Z R, WEN C Y, XING L T, et al. Adaptive output feedback control of nonlinear systems with mismatched uncertainties under input/output quantization[J]. IEEE Trans. on Automatic Control, 2022, 67 (9): 4801- 4808.
doi: 10.1109/TAC.2022.3159543 |
| 21 | LIU W, LIU G. Backstepping-based control for a manipulator system with disturbances and input quantization[C]//Proc. of the 33rd Chinese Control and Decision Conference, 2021: 2901−2905. |
| 22 | WANG S. Adaptive quantization control for multi-machine power system with SVC and unknown disturbance[C]//Proc. of the IEEE International Conference on Electrical Engineering, Big Data and Algorithms, 2022: 159−163. |
| 23 | XU Y, LI T, YANG Y, et al. Anti-attack event-triggered control for nonlinear multi-agent systems with input quantization[J]. IEEE Trans. on Neural Networks and Learning Systems, 2023, 34(12): 10105−10115. |
| 24 |
PAN T T, CHANG X H. , LIU Y. Robust fuzzy feedback control for nonlinear systems with input quantization[J]. IEEE Trans. on Fuzzy Systems, 2022, 30 (11): 4905- 4914.
doi: 10.1109/TFUZZ.2022.3163908 |
| 25 |
KAMALI S, TABATABAEI S M, AREFI M M, et al. Prescribed performance quantized tracking control for a class of delayed with actuator hysteresis using a filtier-connected switched hysteretic quantizer[J]. IEEE Trans. on Neural Networks and Learning Systems, 2022, 33 (1): 61- 74.
doi: 10.1109/TNNLS.2020.3027492 |
| 26 |
LI J S, YANG C F, QI B J, et al. 4SCIG: a four-branch framework to reduce the interference of sky area in cross-view image geo-localization[J]. IEEE Trans. on Geoscience and Remote Sensing, 2024, 62, 4703818.
doi: 10.1109/TGRS.2024.3379376. |
| 27 | 张佳龙. 无人机集群编队自主协同作战的控制方法研究[D]. 西安: 西北工业大学, 2020. |
| ZHANG J L. Research on autonomous cooperative operation control method for UAV swarm formation[D]. Xi’an: Northwestern Polytechnical University, 2020. | |
| 28 |
周思全, 化永朝, 董希旺, 等. 面向空地协同作战的无人机-无人车异构时变编队跟踪控制[J]. 航空兵器, 2019, 26 (4): 54- 59.
doi: 10.12132/ISSN.1673-5048.2019.0149 |
|
ZHOU S Q, HUA Y Z, DONG X W, et al. Air-ground time-varying formation tracking control for heterogeneous UAV-UGV swarm system[J]. Aero Weaponry, 2019, 26 (4): 54- 59.
doi: 10.12132/ISSN.1673-5048.2019.0149 |
|
| 29 | WANG X H, XU D B, JI H B. Consensus of heterogeneous multi-agent nonlinear systems with unknown leaders[C]//Proc. of the 35th Chinese Control Conference, 2016. |
| 30 |
WANG N, WU Z H, PENG L. Consensus of heterogeneous multi-agent systems based on sampled data with a small sampling delay[J]. Chinese Physics B, 2014, 23 (10): 108901.
doi: 10.1088/1674-1056/23/10/108901 |
| 31 | SUN G F, TIAN Y, WANG S Z. Adaptive neural output feedback control for strict feedback nonlinear system[J]. Control Theory & Applications, 2017, 514: 605−616. |
| 32 |
HU Q L, YU Y B, LI B, et al. Finite-time attitude tracking control for spacecraft with uncertain actuator configuration[J]. Proceedings of the Institution of Mechanical Engineers, 2015, 229 (13): 2457- 2468.
doi: 10.1177/0954410015578478 |
| [1] | FU Xiao-wei, WEI Guang-wei, GAO Xiao-guang. Cooperative area search algorithm for multi-UAVs in uncertainty environment [J]. Systems Engineering and Electronics, 2016, 38(4): 821-827. |
| [2] | FU Xiao-wei, FENG Hui-cheng, GAO Xiao-guang. UAVs cooperative target tracking under communication range constraints [J]. Journal of Systems Engineering and Electronics, 2013, 35(8): 1663-1668. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||