Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (7): 2314-2328.doi: 10.12305/j.issn.1001-506X.2025.07.24
• Guidance, Navigation and Control • Previous Articles
Improved A-star algorithm for dynamic path planning of unmanned ships
Xiaozhen YAN1,*, Xinyue ZHOU1, Qinghua LUO1,2
- 1. School of Information Science and Engineering, Harbin Institute of Technology (Weihai), Weihai 264200, China
2. Shandong Institute of Shipbuilding Technology, Weihai 264209, China
-
Received:2024-06-25Online:2025-07-16Published:2025-07-22 -
Contact:Xiaozhen YAN
CLC Number:
Cite this article
Xiaozhen YAN, Xinyue ZHOU, Qinghua LUO. Improved A-star algorithm for dynamic path planning of unmanned ships[J]. Systems Engineering and Electronics, 2025, 47(7): 2314-2328.
share this article
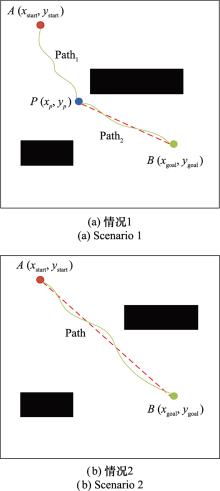
Fig.1
Environmental scenarios"
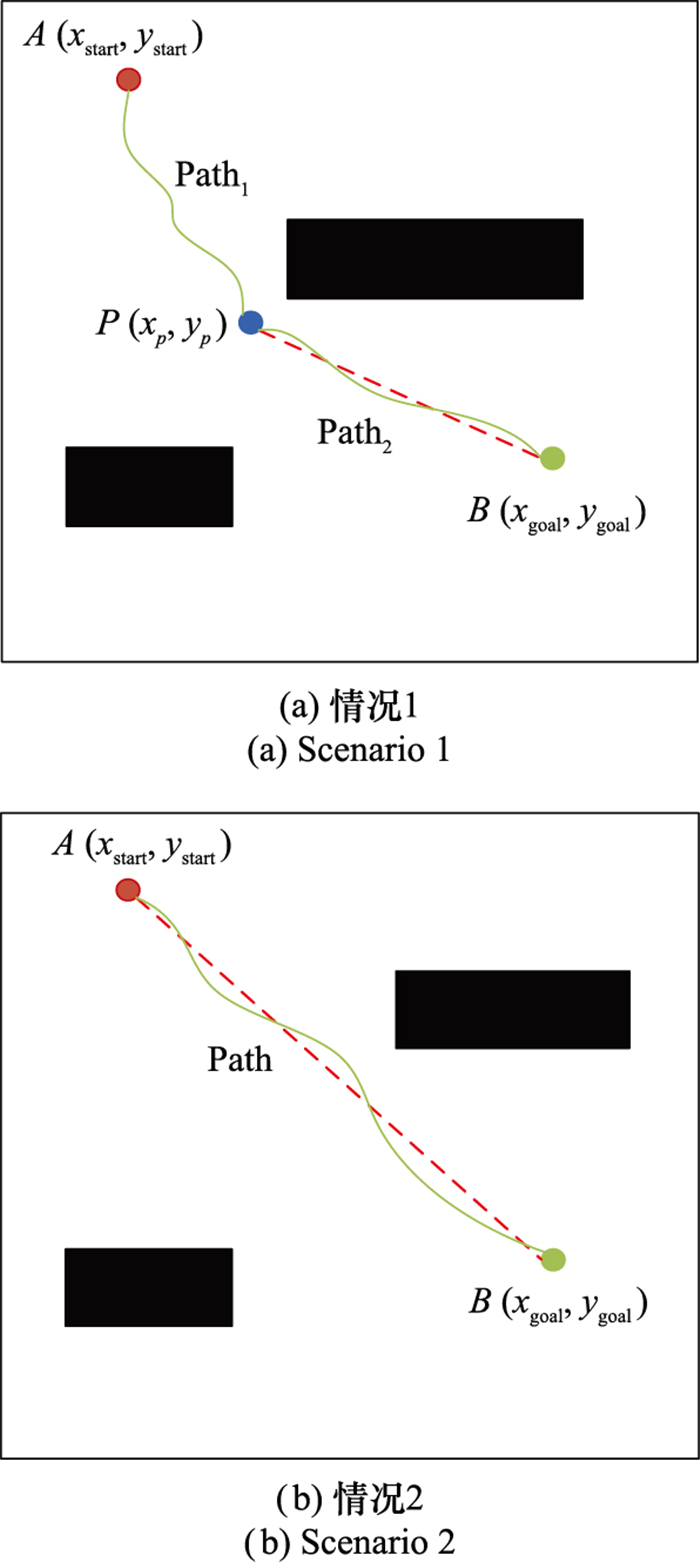

Fig.2
Principle diagram for finding optimal boundary point"
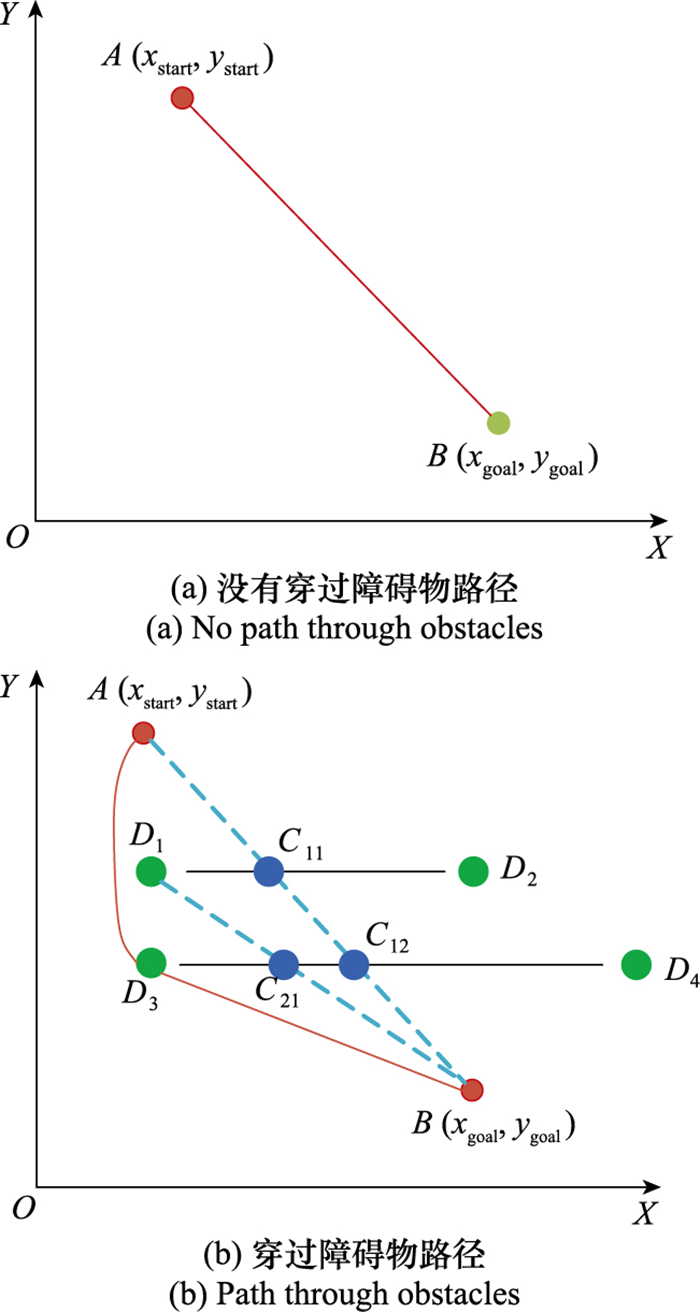

Fig.3
Principle diagram of finding new boundary points"

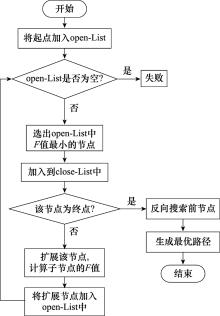
Fig.4
Traditional A-star algorithm flowchart"
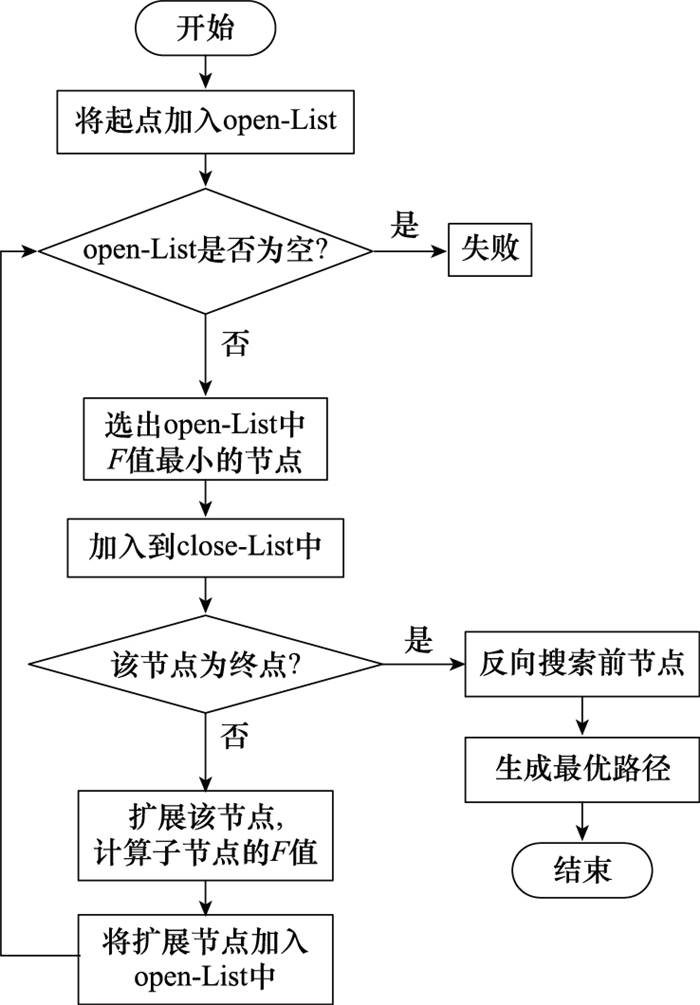

Fig.5
Algorithm framework diagram"

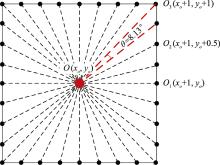
Fig.6
32 neighborhood search directions"
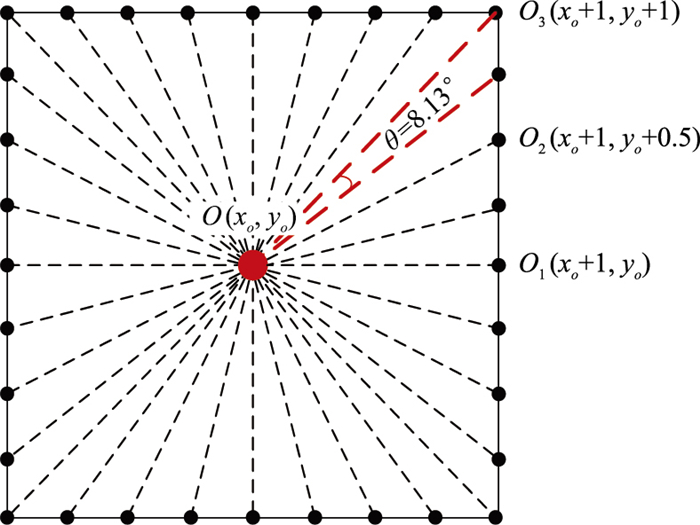
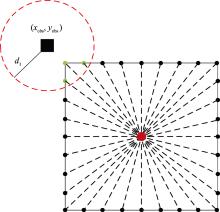
Fig.7
Schematic diagram of safe distance search point"
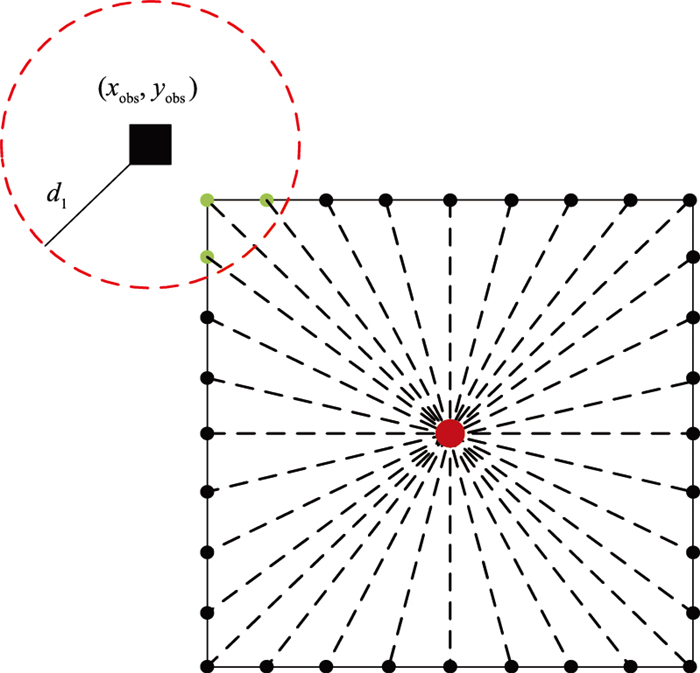
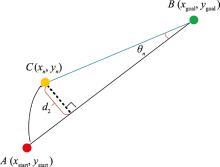
Fig.8
Linear guidance path analysis"
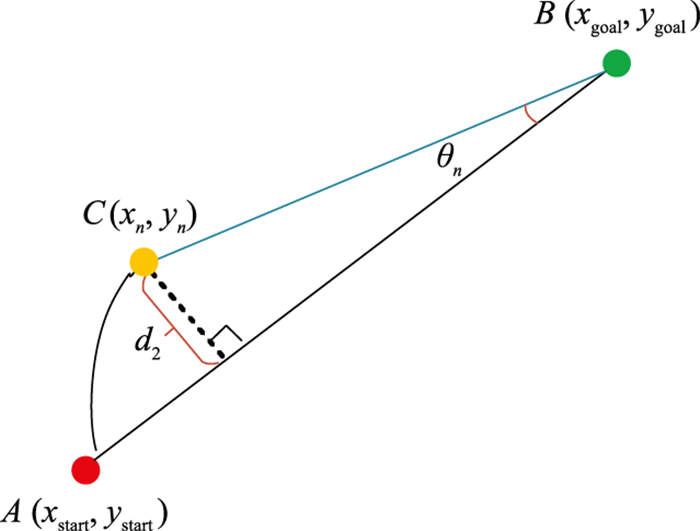
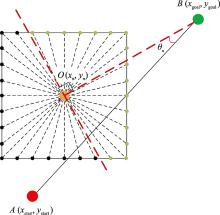
Fig.9
Principle diagram of focusing on 16 neighborhood search direction"
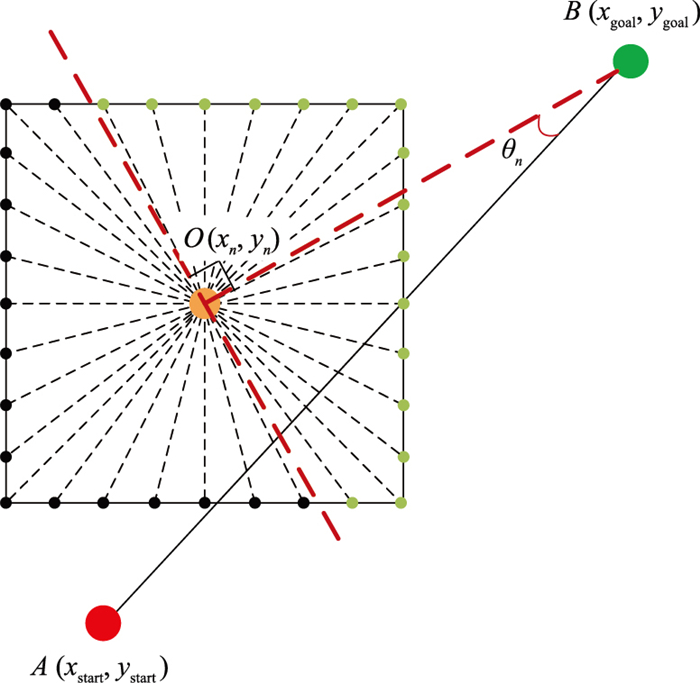
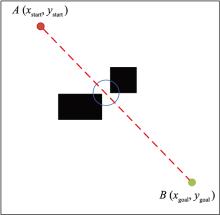
Fig.10
Special circumstance"
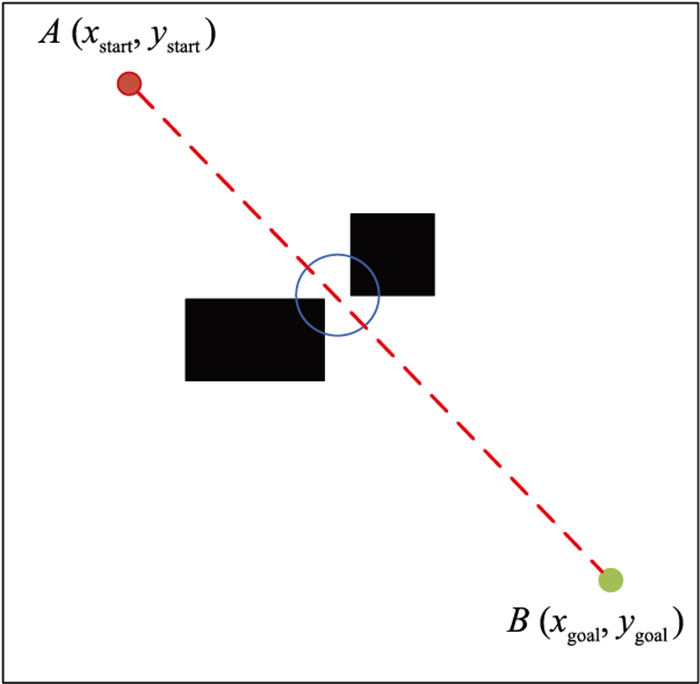
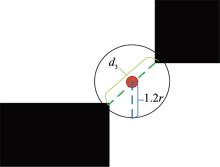
Fig.11
Distance assessment"
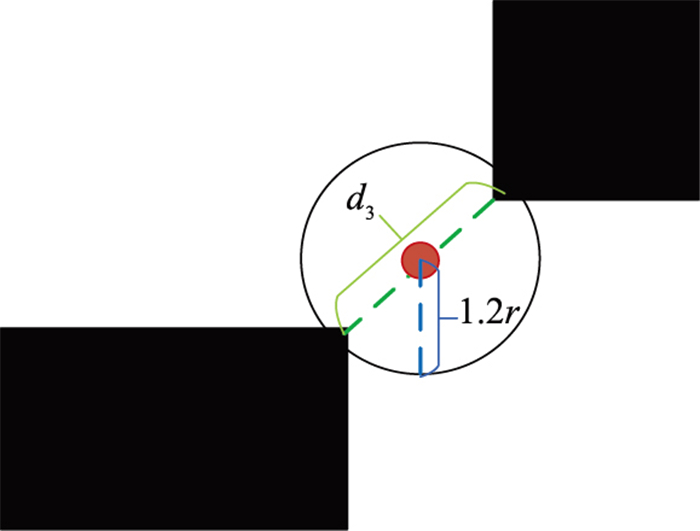

Fig.12
Obstacle coherence processing"
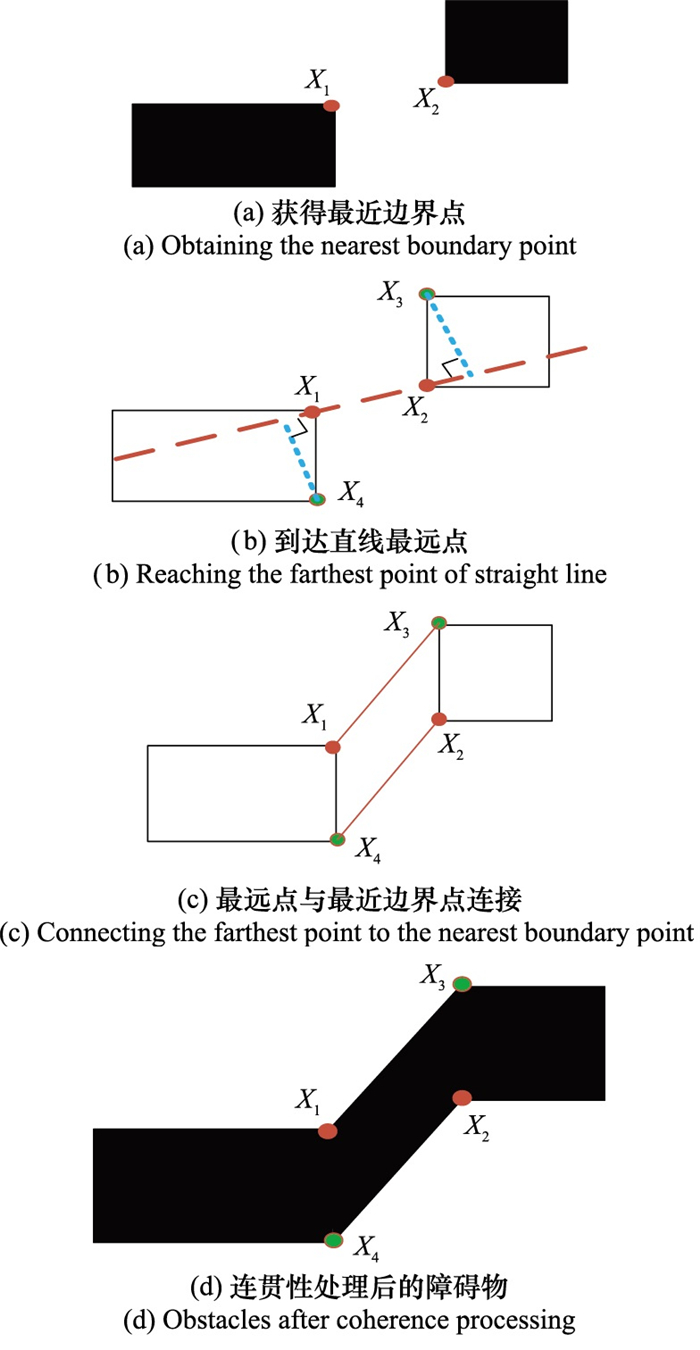
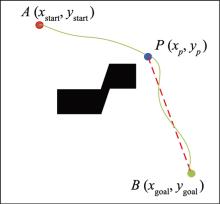
Fig.13
Path planning after processing special circumstances"
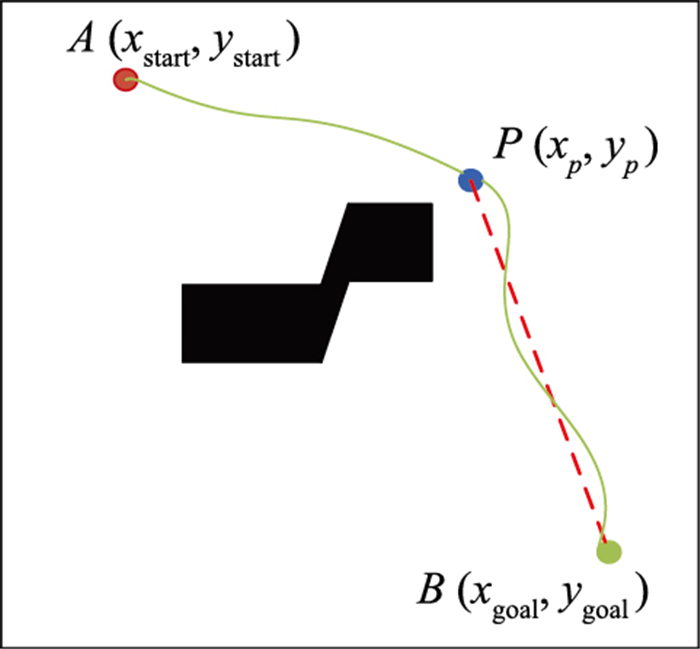
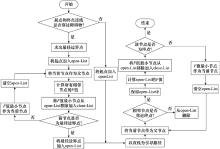
Fig.14
Improved A-star algorithm flowchart"
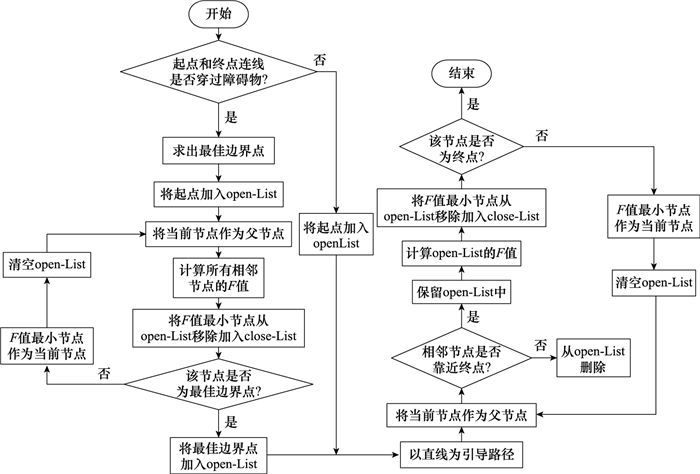
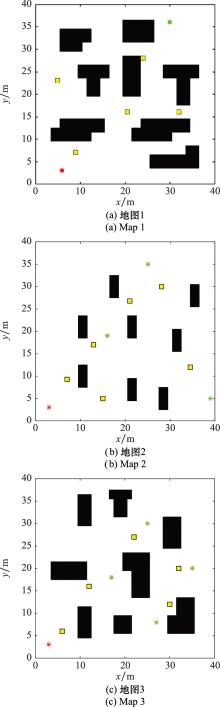
Fig.15
Experimental simulation map"
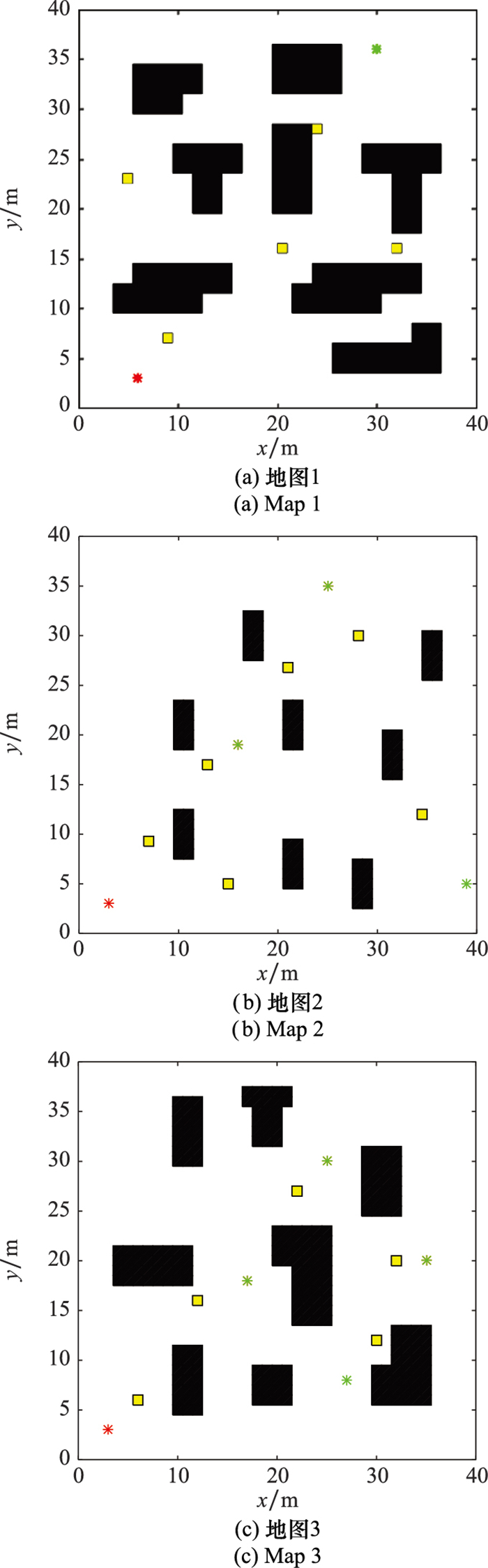
Table 1
Distribution of starting and target points in simulation maps"
| 位置 | 地图 1 | 地图 2 | 地图 3 |
| 起点 | (6, 3) | (3, 3) | (3, 3) |
| 目标点1 | (30, 36) | (16, 19) | (17, 18) |
| 目标点2 | — | (25, 35) | (25, 30) |
| 目标点3 | — | (39, 5) | (35, 20) |
| 目标点4 | — | — | (27, 8) |
Table 2
Parameter settings"
| 参数 | 数值 |
| r | 2 |
| d1 | 2 |

Fig.16
DIA-star simulation results in map 1"

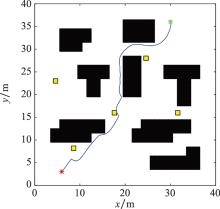
Fig.17
IAPF simulation results in map 1"
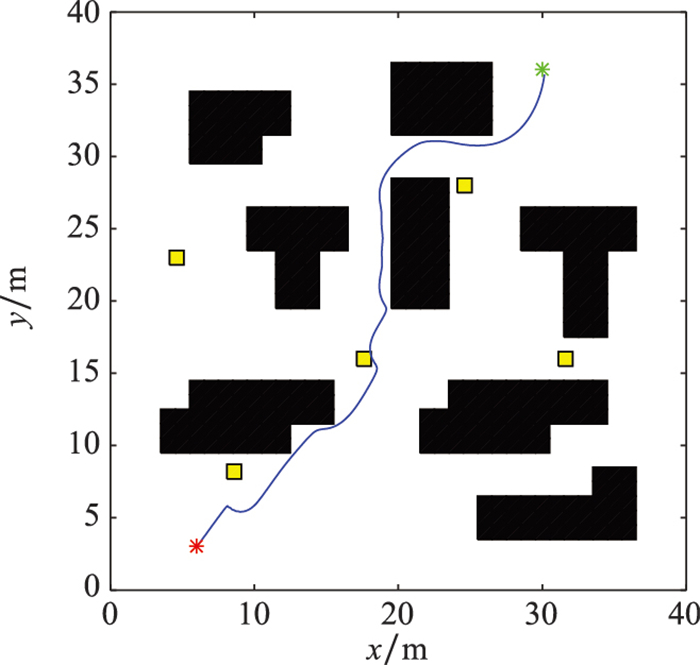
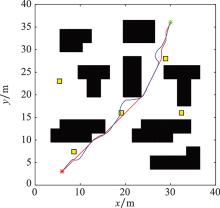
Fig.18
IA*-APF simulation results in map 1"
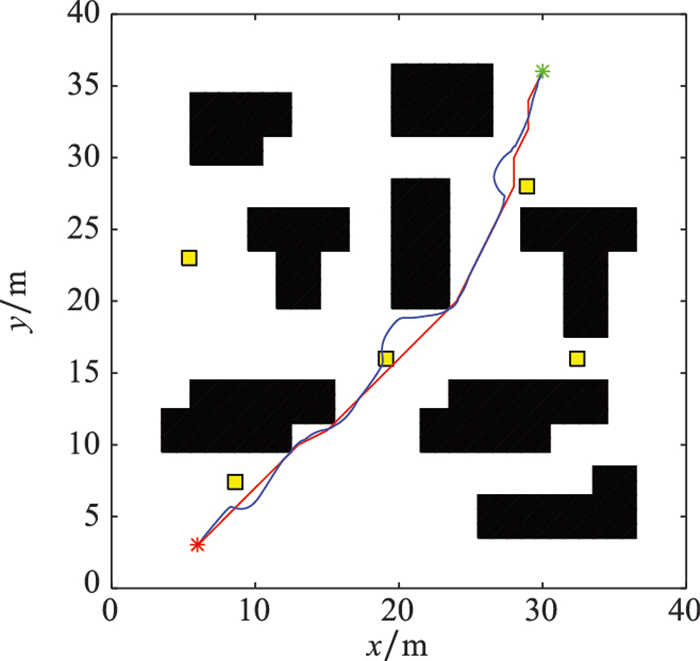
Table 3
Map 1 simulation result data"
| 评价指标 | IAPF | IA*-APF | DIA-star |
| 路径长度/m | 47.61 | 45.33 | 45.29 |
| Plength/% | 4.88 | 0.09 | — |
| 平滑度/rad | 20.12 | 16.41 | 12.61 |
| Pangle/% | 37.32 | 23.17 | — |
| 碰撞风险度 | 56.26 | 66.19 | 0 |
| Pcoll/% | 100 | 100 | — |
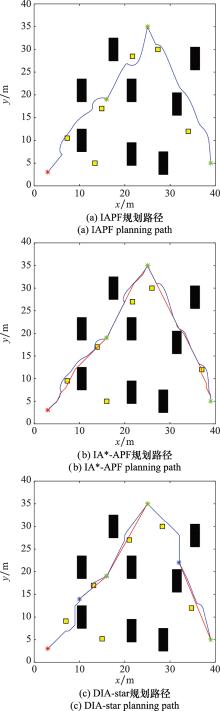
Fig.19
Simulation results of three algorithms in map 2"
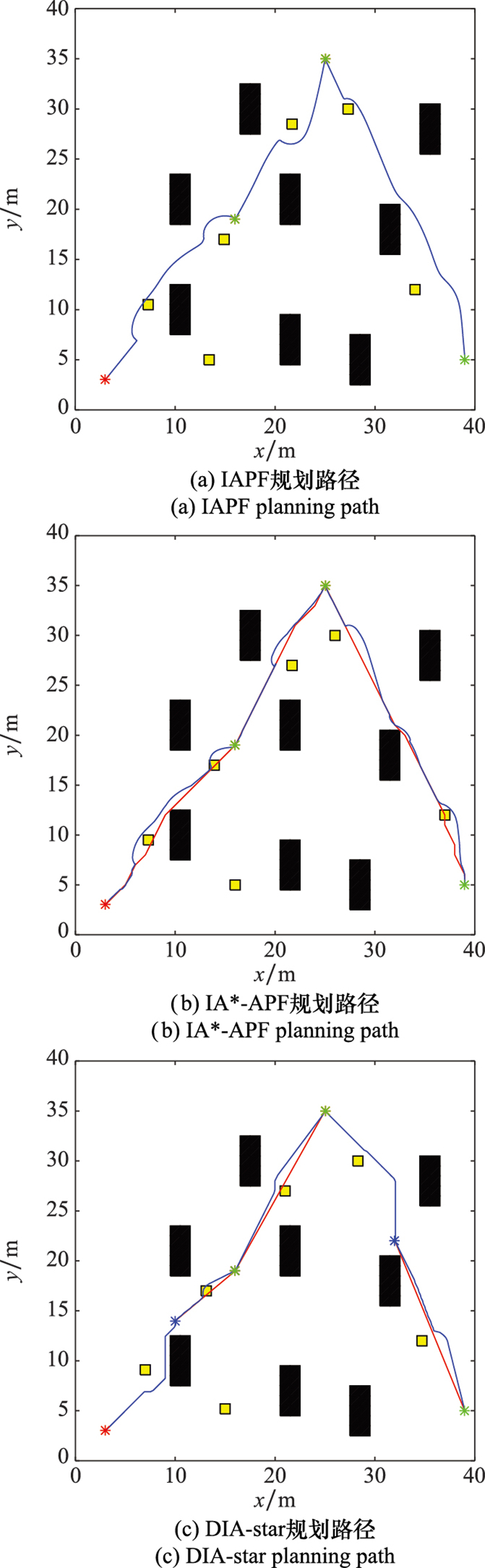
Table 4
Map 2 simulation result data"
| 算法 | 评价指标 | 第1段 | 第2段 | 第3段 | 合计 |
| IAPF | 路径长度/m | 22.85 | 20.1 | 35.2 | 78.15 |
| 平滑度/rad | 13.9 | 7.8 | 12.42 | 34.12 | |
| 碰撞风险度 | 0 | 0 | 21.99 | 21.99 | |
| IA*-APF | 路径长度/m | 22.5 | 21.2 | 35.15 | 78.85 |
| 平滑度/rad | 15.8 | 6.79 | 14.67 | 37.26 | |
| 碰撞风险度 | 0 | 0 | 14.99 | 14.99 | |
| DIA-star | 路径长度/m | 22.72 | 19.01 | 34.62 | 76.35 |
| 平滑度/rad | 9.34 | 2.43 | 11.86 | 23.63 | |
| 碰撞风险度 | 0 | 0 | 2.73 | 2.73 |
Table 5
Comparison in map 2 %"
| 算法 | Plength | Pangle | Pcoll |
| IAPF | 2.3 | 30.76 | 87.58 |
| IA*-APF | 3.17 | 36.57 | 81.79 |
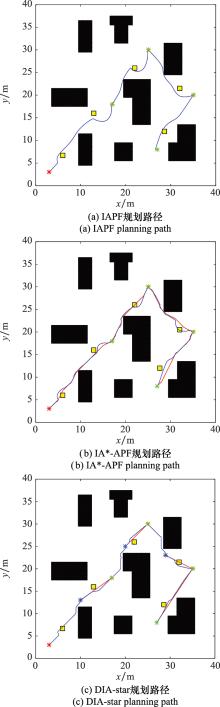
Fig.20
Simulation results of three algorithms in map 3"
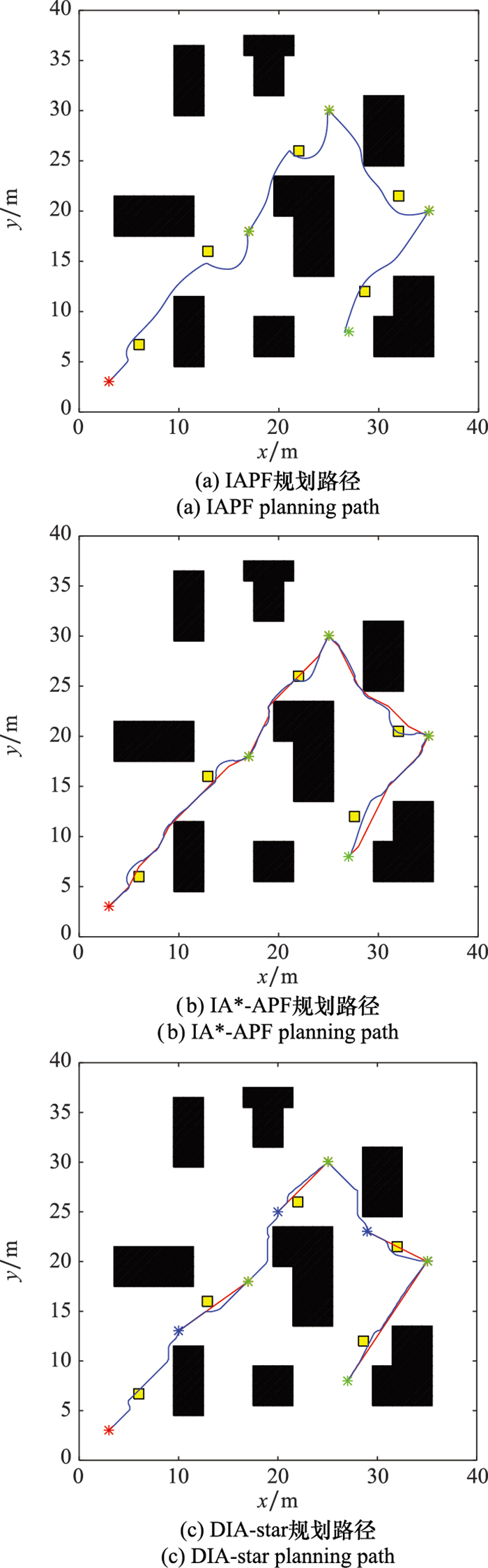
Table 6
Map 3 simulation result data"
| 算法 | 评价指标 | 第1段 | 第2段 | 第3段 | 第4段 | 合计 |
| IAPF | 路径长度/m | 24 | 16.5 | 16.1 | 16 | 72.6 |
| 平滑度/rad | 13.15 | 15.61 | 12.21 | 11.3 | 52.27 | |
| 碰撞风险度 | 29.36 | 0 | 79.11 | 58.80 | 167.27 | |
| IA*-APF | 路径长度/m | 23.05 | 16.5 | 16.05 | 15.25 | 70.85 |
| 平滑度/rad | 10.81 | 9.23 | 13.27 | 13.49 | 46.8 | |
| 碰撞风险度 | 18.51 | 26.20 | 0 | 19.41 | 64.12 | |
| DIA-star | 路径长度/m | 22.14 | 16.08 | 15.84 | 14.60 | 68.66 |
| 平滑度/rad | 8.67 | 9.17 | 10.6 | 4.78 | 33.22 | |
| 碰撞风险度 | 0 | 0 | 0 | 0 | 0 |
Table 7
Comparison in map 3 %"
| 算法 | Plength | Pangle | Pcoll |
| IAPF | 5.42 | 36.44 | 100 |
| IA*-APF | 3.09 | 29.03 | 100 |
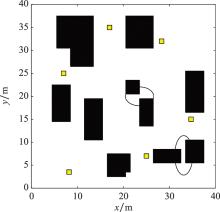
Fig.21
Map of special circumstance"
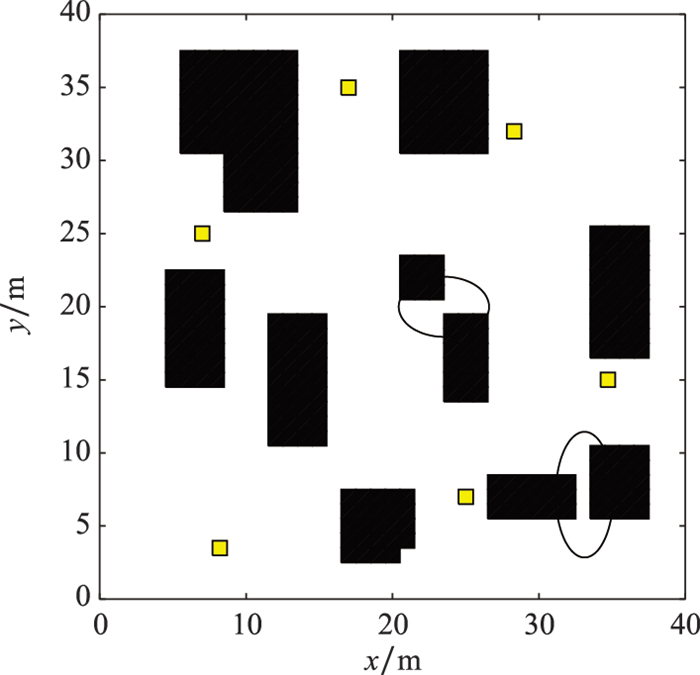
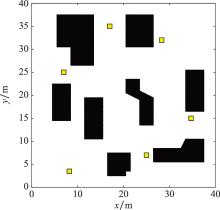
Fig.22
Map after obstacle coherence processing"
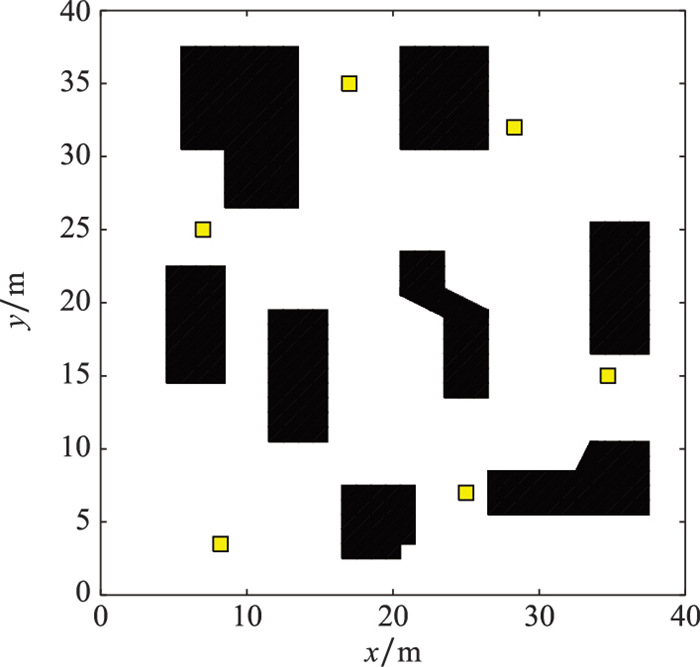
Table 8
DIA-star algorithm obtained simulation result data of special circumstance map"
| 评价指标 | 仿真结果 |
| 路径长度/m | 51.52 |
| 平滑度/rad | 9.31 |
| 碰撞风险度 | 18.39 |
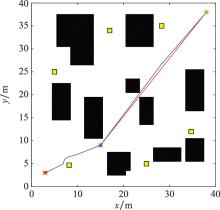
Fig.23
DIA-star algorithm obtained path of special circumstance map"
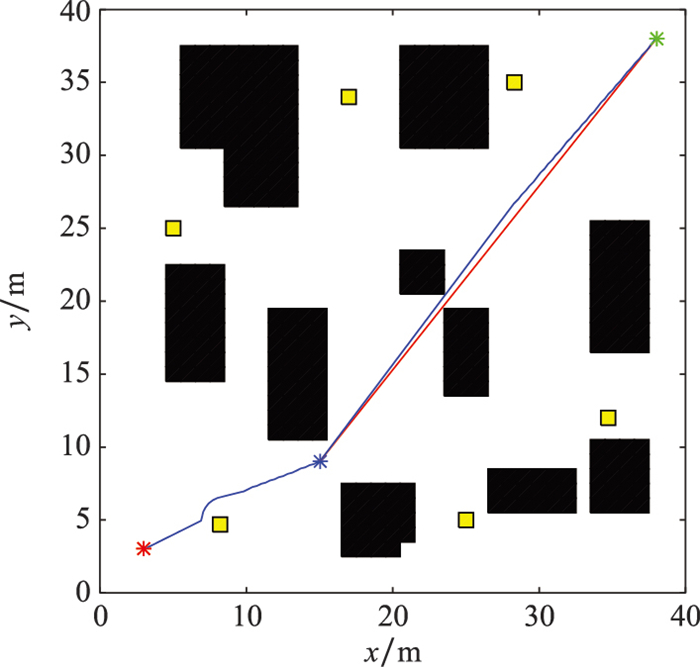
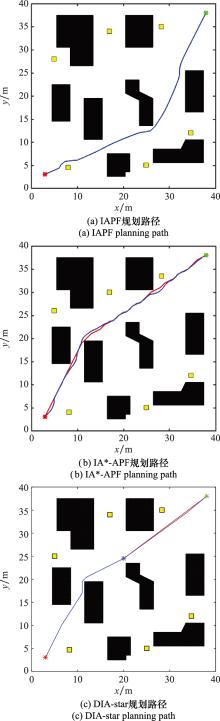
Fig.24
Simulation results with three algorithms after coherence processing"
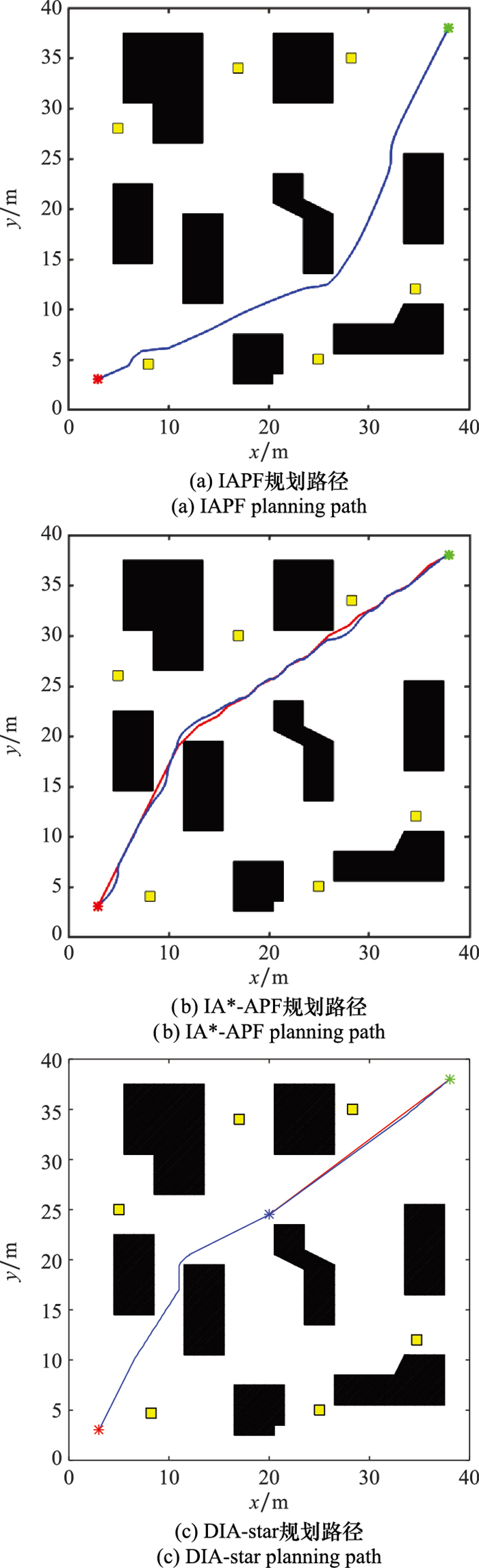
Table 9
Simulation result data after coherence processing"
| 评价指标 | IAPF | IA*-APF | DIA-star |
| 路径长度/m | 54.26 | 53.75 | 52.35 |
| Plength/% | 3.52 | 2.6 | — |
| 平滑度/rad | 10.93 | 29.04 | 10.75 |
| Pangle/% | 1.67 | 62.98 | - |
| 碰撞风险度 | 0 | 1.1 | 0 |
| Pcoll/% | 0 | 100 | — |
| 1 |
赵贵祥, 周健, 李云淼, 等. 改进双向快速搜索随机树的无人艇路径规划[J]. 系统工程与电子技术, 2024, 46 (4): 1364- 1371.
doi: 10.12305/j.issn.1001-506X.2024.04.25 |
|
ZHAO G X , ZHOU J , LI Y M , et al. Improved bi-directional rapidly-exploring random tree path planning for USV[J]. Systems Engineering and Electronics, 2024, 46 (4): 1364- 1371.
doi: 10.12305/j.issn.1001-506X.2024.04.25 |
|
| 2 | YUAN S Y , LI Y , BAO F W , et al. Marine environmental monitoring with unmanned vehicle platforms: present applications and future prospects[J]. Science of The Total Environment, 2023, 858, 159741- 159755. |
| 3 | MA Y , ZHU P X , ZHU G B , et al. Cooperative towing for double unmanned surface vehicles connected with a floating rope via vertical formation and adaptive moment control[J]. Ocean Engineering, 2023, 279, 114486- 114497. |
| 4 | CHO S W , PARK H J , LEE H , et al. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations[J]. Computers & Industrial Engineering, 2021, 161, 107612- 107626. |
| 5 | GAO K Z , GAO M L , ZHOU M C , et al. Artificial intelligence algorithms in unmanned surface vessel task assignment and path planning: a survey[J]. Swarm and Evolutionary Computation, 2024, 86, 101505- 101518. |
| 6 | JIANG C J, ZHU H, XIE Y. Dynamic obstacle avoidance research for mobile robots incorporating improved A-star algorithm and DWA algorithm[C]//Proc. of the IEEE International Conference on Computer Science, Electronic Information Engineering and Intelligent Control Technology, 2023: 896-900. |
| 7 | ZHANG R , GUO H , ANDRIUKAITIS D , et al. Intelligent path planning by an improved RRT algorithm with dual grid map[J]. Alexandria Engineering Journal, 2024, 88, 91- 104. |
| 8 | ZHANG W , WANG N X , WU W H . A hybrid path planning algorithm considering AUV dynamic constraints based on improved A* algorithm and APF algorithm[J]. Ocean Engineering, 2023, 285, 115333- 115342. |
| 9 | ZENG Y X , XU K . Recognition and interfere deceptive behavior based on inverse reinforcement learning and game theory[J]. Journal of Systems Engineering and Electronics, 2023, 34 (2): 270- 288. |
| 10 | ZHAO J L , DEENG C S , YU H H , et al. Path planning of unmanned vehicles based on adaptive particle swarm optimization algorithm[J]. Computer Communications, 2024, 216, 112- 129. |
| 11 | MIYOMBO M E , LIU Y K , MULENGA C M , et al. Optimal path planning in a real-world radioactive environment: a comparative study of A-star and Dijkstra algorithms[J]. Nuclear Engineering and Design, 2024, 420, 113039- 113048. |
| 12 | SIEVER M , VALENTINO A , SURYANINGRUM K M , et al. Dijkstra's algorithm to find the nearest vaccine location[J]. Procedia Computer Science, 2023, 216, 5- 12. |
| 13 | BAO W, LI J, PAN Z H, et al. Improved A-star algorithm for mobile robot path planning based on sixteen-direction search[C]// Proc. of the IEEE China Automation Congress, 2022: 1332-1336. |
| 14 | ZHANG Y , LI L L , LIN H C , et al. Development of path planning approach using improved A-star algorithm in AGV system[J]. Journal of Internet Technology, 2019, 20 (3): 915- 924. |
| 15 | SONG R , LIU Y C , BUCKNALL R . Smoothed A* algorithm for practical unmanned surface vehicle path planning[J]. Applied Ocean Research, 2019, 83, 9- 20. |
| 16 | GUO B , KUANG Z , GUAN J H , et al. An improved a-star al gorithm for complete coverage path planning of unmanned ships[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2022, 36 (3): 2259009. |
| 17 | LIU C G , MAO Q Z , CHU X M , et al. An improved A-star algorithm considering water current, traffic separation and berthing for vessel path planning[J]. Applied Sciences, 2019, 9 (6): 1057. |
| 18 | CHANG T G , TIAN G F . Hybrid A-Star path planning method based on hierarchical clustering and trichotomy[J]. Applied Sciences, 2024, 14 (13): 5582. |
| 19 | LI Y, WANG Z X, ZHANG S Y. Path planning of robots based on an improved A-star algorithm[C]//Proc. of the IEEE Electronic and Automation Control Conference, 2022: 826-831. |
| 20 | LIU H Y , LIU J X . Research on automatic path planning method of warehouse inspection robot[J]. Applied Artificial Intelligence, 2023, 37 (1): 2306- 2321. |
| 21 | 王子静, 陈熙源. 基于改进A*和DWA的无人艇路径规划算法[J]. 传感技术学报, 2021, 34 (2): 249- 254. |
| WANG Z J , CHEN X Y . An unmanned boat path planning algorithm based on improved A* and DWA[J]. Journal of Sensing Technology, 2021, 34 (2): 249- 254. | |
| 22 | XIE S R , WU P , LIU H L , et al. A novel method of unmanned surface vehicle autonomous cruise[J]. Industrial Robot: an International Journal, 2016, 43 (1): 121- 130. |
| 23 |
李文刚, 汪流江, 方德翔, 等. 联合A与动态窗口法的路径规划算法[J]. 系统工程与电子技术, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
LI W G , WANG L J , FANG D X , et al. Path planning algorithm combining A with DWA[J]. Systems Engineering and Electronics, 2021, 43 (12): 3694- 3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
| 24 | LIU H X , ZHANG Y H . ASL-DWA: an improved A-star algorithm for indoor cleaning robots[J]. IEEE Access, 2022, 10, 99498- 99515. |
| 25 | LIU Y J , WANG C , WU H , et al. Mobile robot path planning based on kinematically constrained A-star algorithm and DWA fusion algorithm[J]. Mathematics, 2023, 11 (21): 4552- 4571. |
| 26 | LIU L S , WANG B , XU H . Research on path-planning algorithm integrating optimization A-star algorithm and artificial potential field method[J]. Electronics, 2022, 11 (22): 3660. |
| 27 | 徐淑萍, 杨定哲, 闫索遥, 等. 室内环境下改进的混合路径规划算法[J]. 西安工业大学学报, 2024, 44 (2): 232- 243. |
| XU S P , YANG D Z , YAN S Y , et al. An improved hybrid path planning algorithm for indoor environments[J]. Journal of Xi'an University of Technology, 2024, 44 (2): 232- 243. | |
| 28 | 余翔, 姜陈, 段思睿, 等. 改进A*算法和人工势场法的路径规划[J]. 系统仿真学报, 2024, 36 (3): 782- 794. |
| YU X , JIANG C , DUAN S R , et al. Path planning for im provement of A* algorithm and artificial potential field method[J]. Journal of System Simulation, 2024, 36 (3): 782- 794. | |
| 29 | 汤玉春, 王睿忠. 基于改进A-star与DWA相融合的移动机器人动态路径规划算法[J]. 智能计算机与应用, 2024, 14 (2): 18- 27. |
| TANG Y C , WANG R Z . Dynamic path planning algorithm for mobile robots based on improved A-star and DWA fusion[J]. Intelligent Computer and Applications, 2024, 14 (2): 18- 27. | |
| 30 | YAN X Z , ZHOU X Y , LUO Q H . A safe heuristic path-planning method based on a search strategy[J]. Sensors, 2023, 24 (1): 101. |
| 31 | ZHANG Z M, JIA R X, CHEN X M, et al. Dynamic obstacle avoidance path planning of unmanned vehicle based on improved APF[C]//Proc. of the IEEE International Symposium on Computer Science and Intelligent Control, 2023: 135-140. |
| [1] | Yijie LIU, Bin JIANG, Yajie MA, Wenbo LI, Chengrui LIU. Collision avoidance path planning and re-planning for USV formation [J]. Systems Engineering and Electronics, 2025, 47(6): 1964-1974. |
| [2] | Wei CHEN, Congqing WANG, Qiang ZENG, Zhan LI. UAV coverage path planning for aircraft surface visual inspection [J]. Systems Engineering and Electronics, 2025, 47(4): 1206-1213. |
| [3] | Ze GENG, Yanyan HUANG, Han ZHANG. UAV swarm anti-artillery search path planning based on artillery transfer path prediction [J]. Systems Engineering and Electronics, 2025, 47(4): 1222-1234. |
| [4] | Yuqi XIA, Yanyan HUANG, Qia CHEN. Path planning for unmanned vehicle reconnaissance based on deep Q-network [J]. Systems Engineering and Electronics, 2024, 46(9): 3070-3081. |
| [5] | Bowen FEI, Weidong BAO, Daqian LIU, Xiaomin ZHU. Air-ground cooperative autonomous task allocation method for dynamic target search and strike [J]. Systems Engineering and Electronics, 2024, 46(7): 2346-2358. |
| [6] | Jie LI, Yuejin TAN. Operation loop recommendation method based on integrated improved ant colony algorithm [J]. Systems Engineering and Electronics, 2024, 46(6): 2002-2012. |
| [7] | Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755. |
| [8] | Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm [J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. |
| [9] | Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG. Research on UAV path planning method based on the multi-precision planning windows [J]. Systems Engineering and Electronics, 2024, 46(5): 1767-1776. |
| [10] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [11] | Guixiang ZHAO, Jian ZHOU, Yunmiao LI, Chenxu WANG. Improved bi-directional rapidly-exploring random tree path planning for USV [J]. Systems Engineering and Electronics, 2024, 46(4): 1364-1371. |
| [12] | Ping YANG, Bing XIAO, Xin CHEN, Luqi TANG. 3D path planning problem for fighter aircraft with multiple constraints [J]. Systems Engineering and Electronics, 2024, 46(12): 4213-4221. |
| [13] | Yinfei WU, Xinkai LI, Hongli ZHANG, Yingying CHEN, Fengjin GONG. Optimization and design of virtual tube based on elastic area characteristics [J]. Systems Engineering and Electronics, 2024, 46(11): 3862-3873. |
| [14] | Heng TANG, Wei SUN, Lei LYU, Ruofei HE, Jianjun WU, Changhao SUN, Tianye SUN. UAV formation path planning approach incorporating dynamic reward strategy [J]. Systems Engineering and Electronics, 2024, 46(10): 3506-3518. |
| [15] | Zihao CHEN, Juan LI, Chang LIU, Jie LI, Xiaoyu LIU. Task planning method for coordinated attacks on ground targets under time constraints [J]. Systems Engineering and Electronics, 2023, 45(8): 2353-2360. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||