Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (10): 3426-3432.doi: 10.12305/j.issn.1001-506X.2025.10.26
• Guidance, Navigation and Control • Previous Articles
Fault diagnosis method of inertial sensor based on iterative double-model Kalman filter
Chenyuan ZHANG1,*, Haiying LIU1,2
- 1. College of Astronautics,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China
2. Nanjing Center for Applied Mathematics,Nanjing 211135,China
-
Received:2024-07-01Online:2025-10-25Published:2025-10-23 -
Contact:Chenyuan ZHANG
CLC Number:
Cite this article
Chenyuan ZHANG, Haiying LIU. Fault diagnosis method of inertial sensor based on iterative double-model Kalman filter[J]. Systems Engineering and Electronics, 2025, 47(10): 3426-3432.
share this article
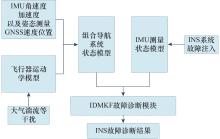
Fig.1
Diagram of INS fault diagnosis strategy"
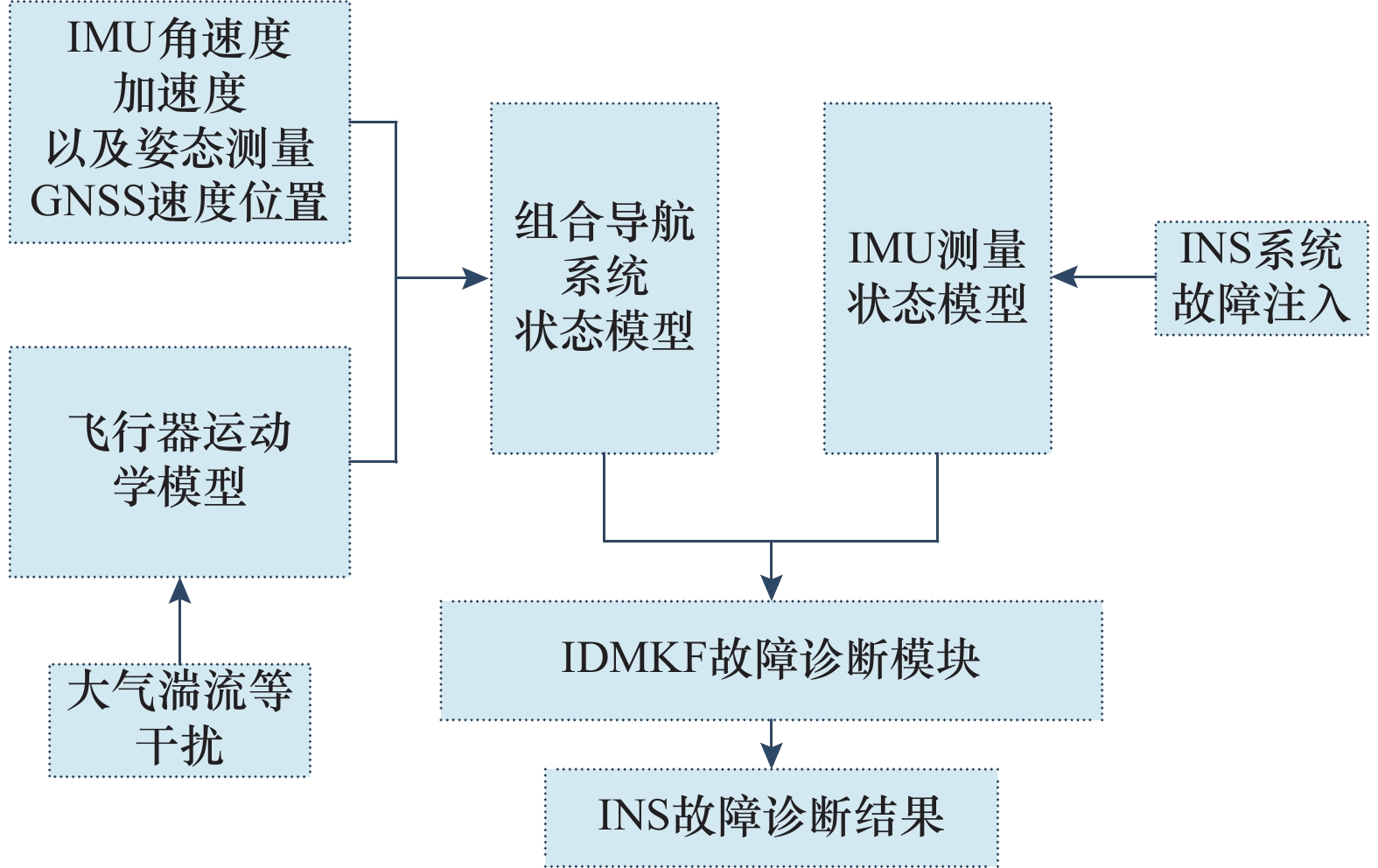
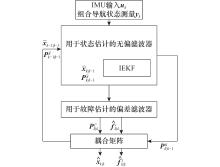
Fig.2
Flow chart of fault diagnosis based on IDMKF algorithm"
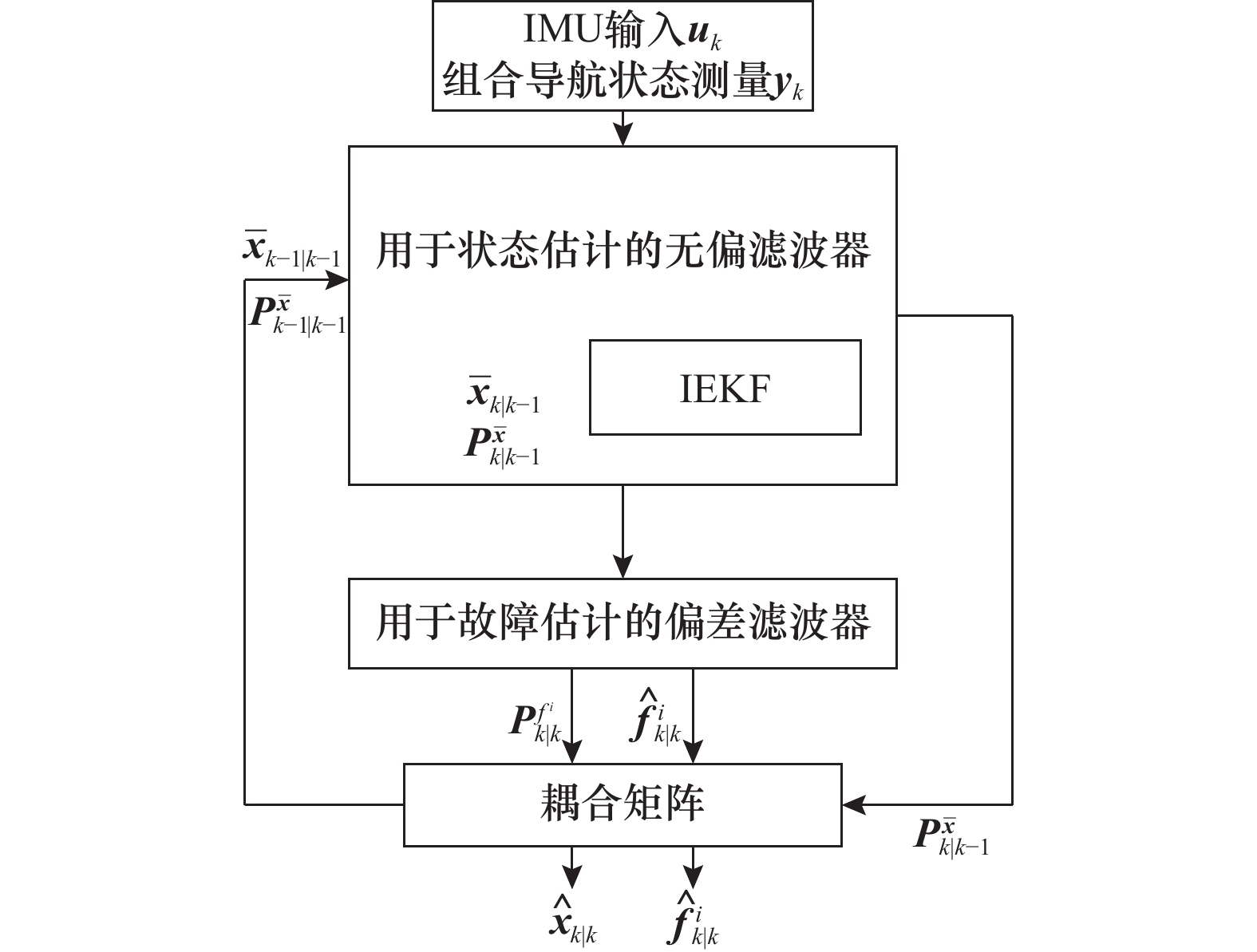
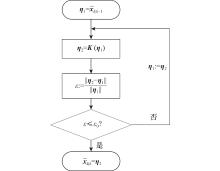
Fig.3
Flow chart of iterative section of bias-free filter"
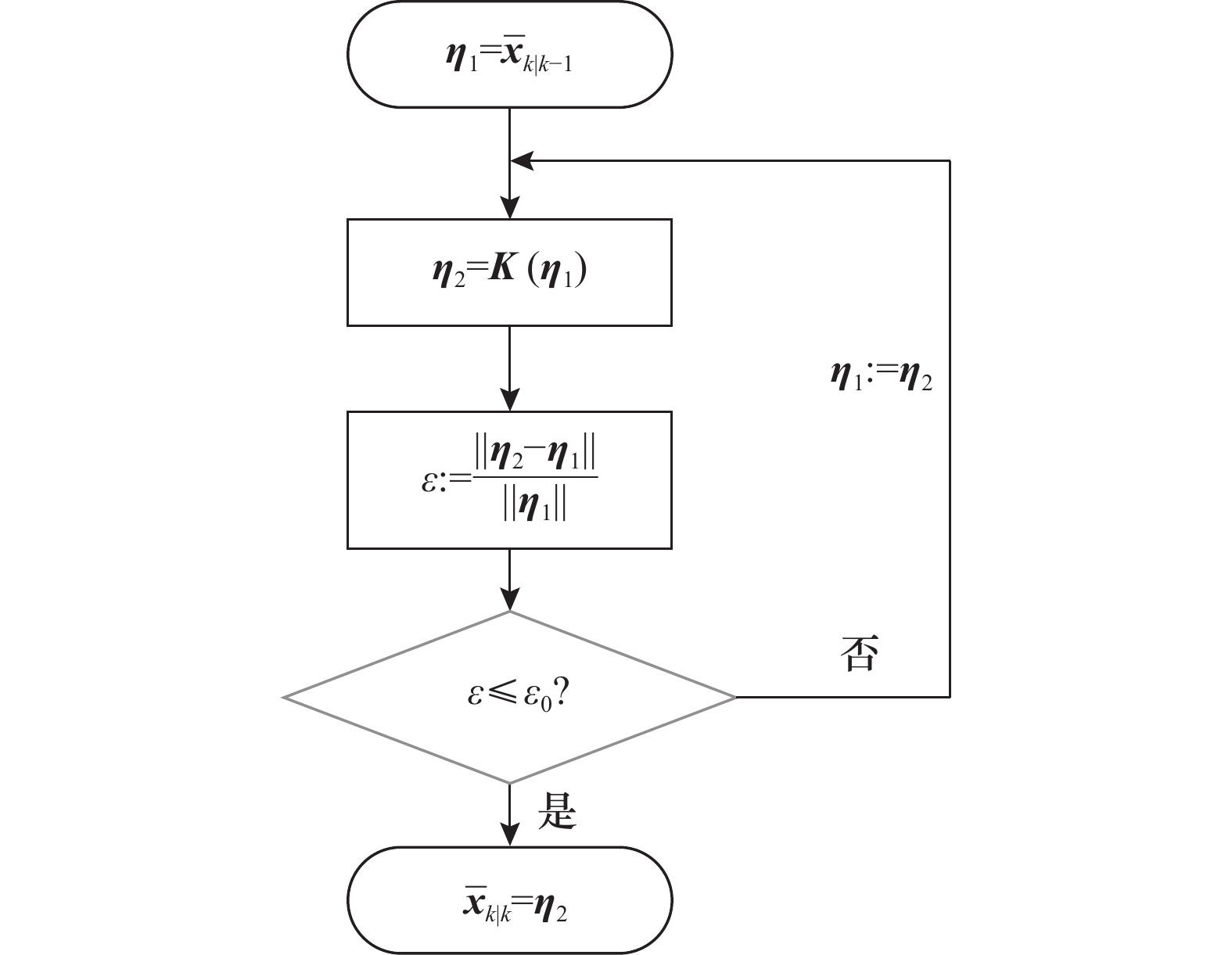
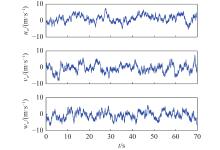
Fig.4
Turbulence velocity"
Table 1
Fault situation"
| 故障时间/s | 故障单元 | 故障类型 | 故障程度/(m·s−2) |
| 13 < t < 23 | 阶跃 | 2 | |
| 斜坡 | 0.1t | ||
| 振荡 | 10sin(0.5πt)/180 | ||
| 33 < t < 43 | 阶跃 | −2 | |
| 振荡 | sin(0.5πt)/180 | ||
| 斜坡 | 1t | ||
| 53 < t < 63 | 振荡 | sin(0.5πt)/180 | |
| 斜坡 | −0.1t | ||
| 振荡 | 5sin(0.5πt)/180 |

Fig.5
Fault estimation results"
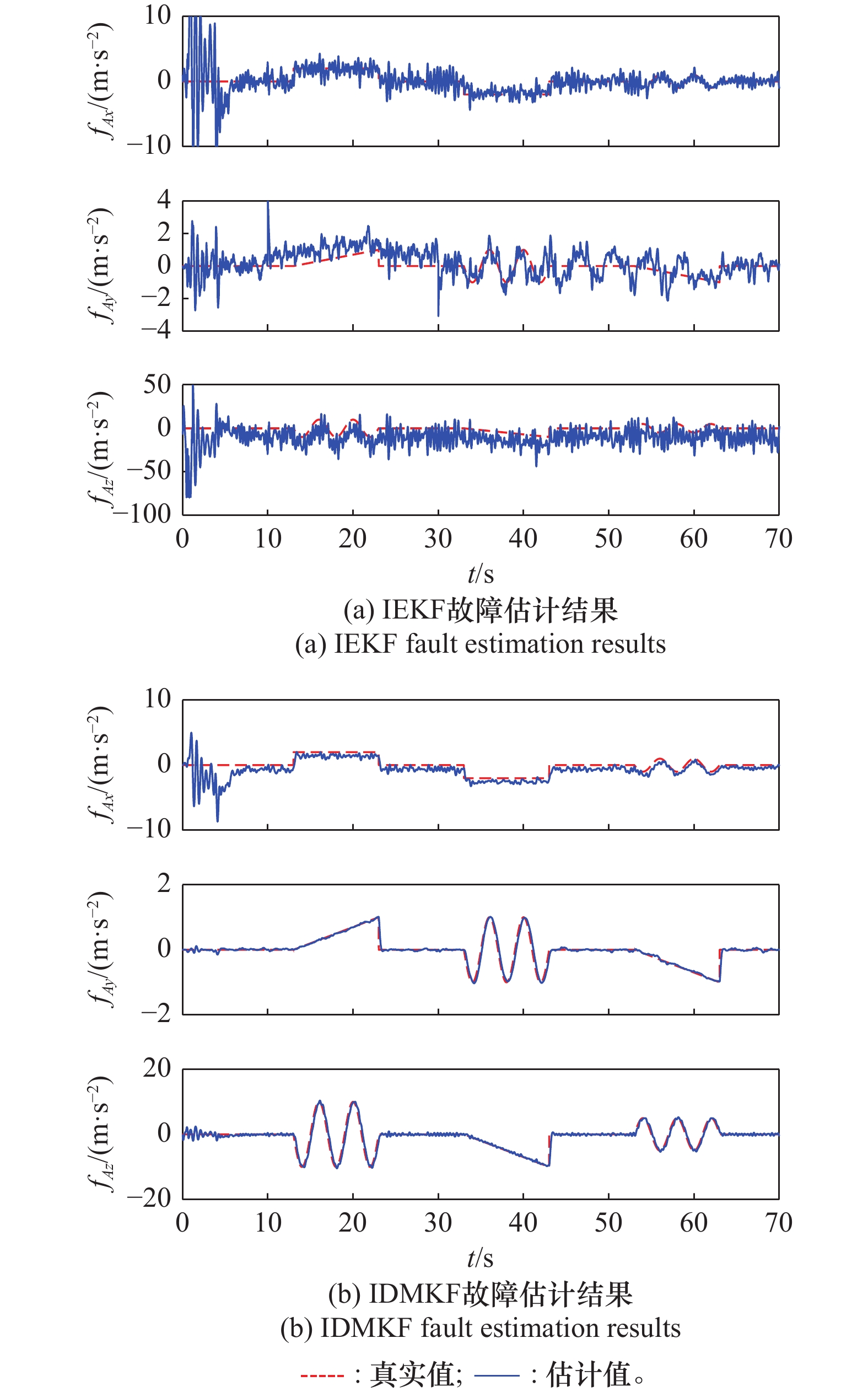

Fig.6
Estimation RMSEs of different methods"
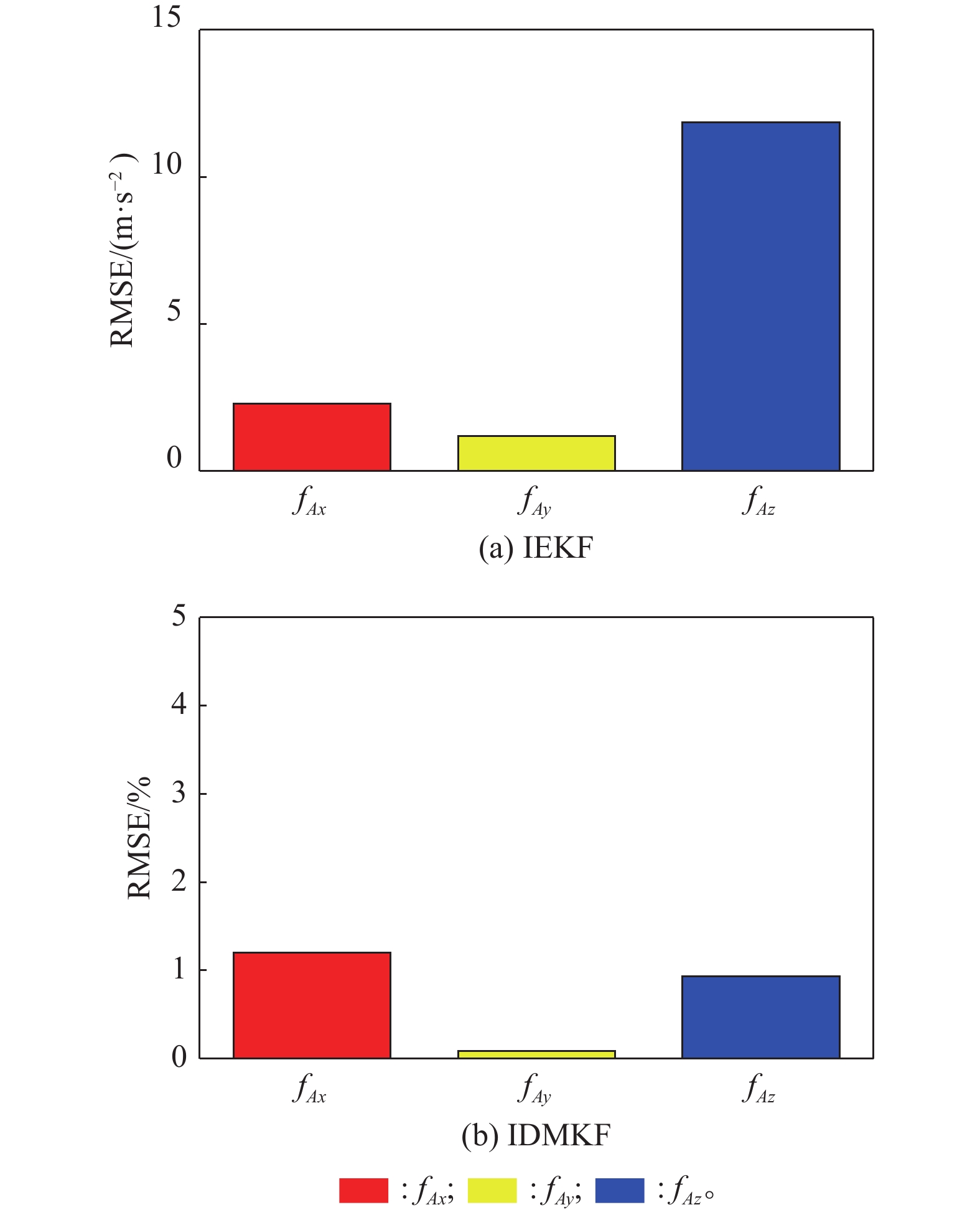
Table 2
Gradual fault situation"
| 故障时间/s | 故障单元 | 故障类型 | 故障程度/(m/s2) |
| 13 < t < 33 | 斜坡 | 0.005t | |
| 33 < t < 53 | 斜坡 | −0.005t |
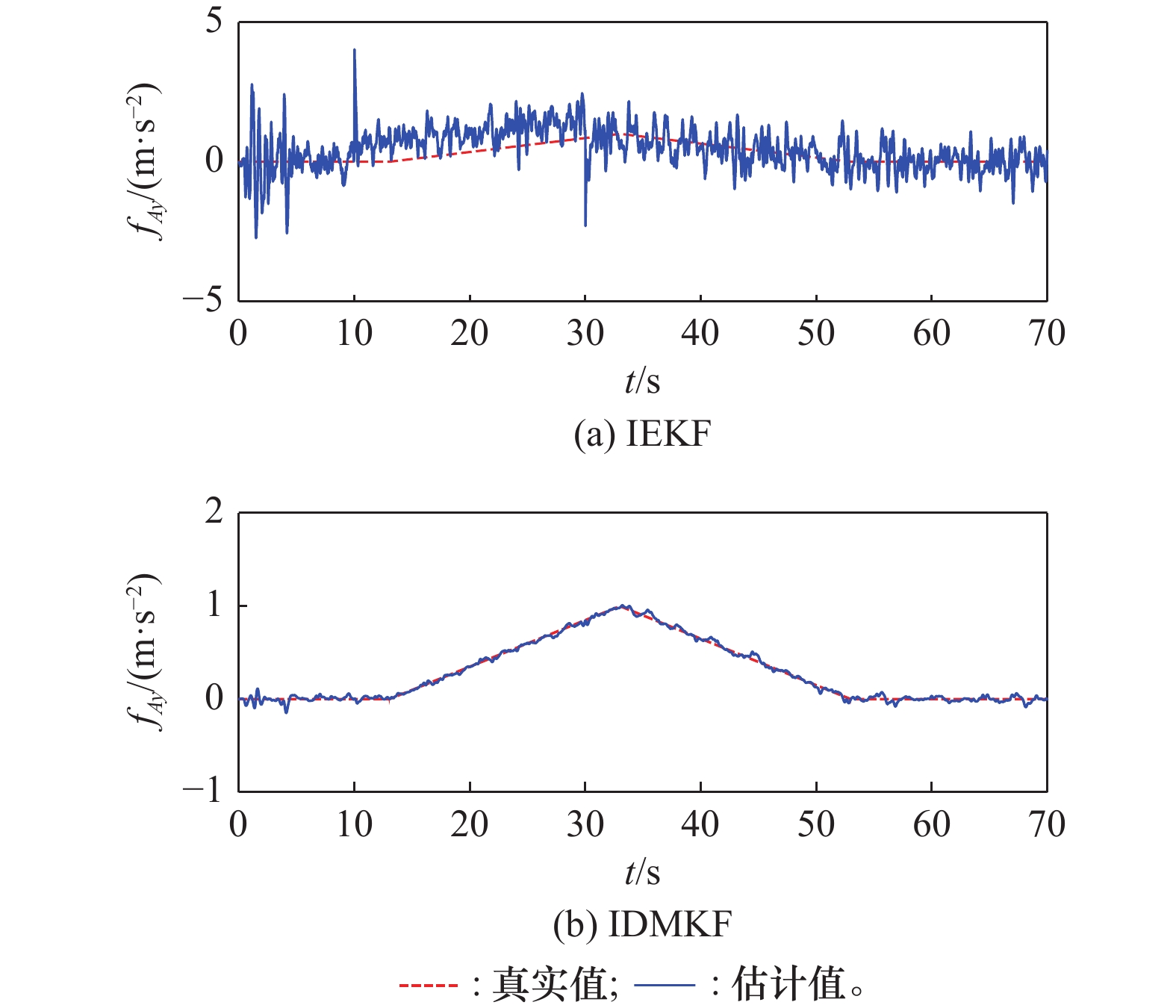
Fig.7
Gradual fault estimation results of different methods"
| 1 | 董燕琴, 陈效真, 王常虹. 导弹智能化对惯性技术发展需求[J]. 导航与控制, 2020, 19 (Z1): 48- 52. |
| DONG Y Q, CHEN X Z, WANG C H. Demand or inertial technology development in missile intelligence[J]. Navigation and Control, 2020, 19 (Z1): 48- 52. | |
| 2 | 张冬, 邢福逸, 徐允鹤, 等. 基于双模式切换的机载惯性/雷达组合导航方法[J]. 系统工程与电子技术, 2024, 46 (8): 2770- 2778. |
| ZHANG D, XING F Y, XU Y H, et al. Airborne inertial/radar integrated navigation method based on dual-mode switching[J]. Systems Engineering and Electronics, 2024, 46 (8): 2770- 2778. | |
| 3 | 刘小汇, 王怡晨, 文超, 等. 复杂城市环境下的全球导航卫星系统/捷联惯性导航系统组合导航算法[J]. 电子与信息学报, 2023, 45 (11): 4150- 4160. |
| LIU X H, WANG Y C, WEN C, et al. Integrated navigation algorithm of global navigation satellite system/inertial navigation system in complex urban environment[J]. Journal of Electronics and Information Technology, 2023, 45 (11): 4150- 4160. | |
| 4 |
WANG S Z, ZHAN X Q, ZHAI Y W, et al. Enhancing navigation integrity for urban air mobility with redundant inertial sensors[J]. Aerospace Science and Technology, 2022, 126, 107631.
doi: 10.1016/j.ast.2022.107631 |
| 5 |
GAO T, SHENG W, ZHOU M L, et al. MEMS inertial sensor fault diagnosis using a CNN-based data-driven method[J]. International Journal of Pattern Recognition and Artificial Intelligence, 2020, 34 (14): 2059048.
doi: 10.1142/S021800142059048X |
| 6 | JIANG X H, DUAN F H, TIAN H, et al. Optimization of reliability centered predictive maintenance scheme for inertial navigation system[J]. Reliability Engineering & System Safety, 2015, 140, 208- 217. |
| 7 | SUN H, CANNON M E. Reliability analysis of an ITS navigation system[C]//Proc. of the Conference on Intelligent Transportation Systems, 1997: 1040−1046. |
| 8 |
AVRAM R C, ZHANG X, CAMPBELL J, et al. IMU sensor fault diagnosis and estimation for quadrotor UAVs[J]. IFAC-PapersOnLine, 2015, 48 (21): 380- 385.
doi: 10.1016/j.ifacol.2015.09.556 |
| 9 |
BERDJAG D, CIESLAK J, ZOLGHADRI A. Fault diagnosis and monitoring of oscillatory failure case in aircraft inertial system[J]. Control Engineering Practice, 2012, 20 (12): 1410- 1425.
doi: 10.1016/j.conengprac.2012.08.007 |
| 10 | ZHONG Y J, ZHANG W, ZHANG Y M. Sensor fault diagnosis for unmanned quadrotor helicopter via adaptive two-stage extended Kalman filter[C]//Proc. of the International Conference on Sensing, Diagnostics, Prognostics, and Control, 2017: 493−498. |
| 11 |
VENKATASUBRAMANIAN V, RENGASWAMY R, YIN K. A review of process fault detection and diagnosis Part I: quantitative model-based methods[J]. Computers and Chemical Engineering, 2003, 27 (3): 293- 311.
doi: 10.1016/S0098-1354(02)00160-6 |
| 12 | DAI Y T, LAI J Z, ZHANG Q Q, et al. An improved fault detection and isolation method for airborne inertial navigation system/attitude and heading reference system redundant system[J]. Aerospace, 2023, 10 (12) |
| 13 |
MARCOS A, GANGULI S B. An application of fault detection and isolation to a transport aircraft[J]. Control Engineering Practice, 2005, 13 (1): 105- 119.
doi: 10.1016/j.conengprac.2004.02.006 |
| 14 |
FREEMAN P, SEILER P, BALAS G. Air data system fault modeling and detection[J]. Control Engineering Practice, 2013, 21 (10): 1290- 1301.
doi: 10.1016/j.conengprac.2013.05.007 |
| 15 | ZOLGHADRI A. Advanced model-based FDIR techniques for aerospace systems: today challenges and opportunities[J]. Progress in Aerospace Sciences, 2012, 53 (3): 18- 29. |
| 16 | LU P, VAN E L, VAN K E, et al. Selective-reinitialisation multiple model adaptive estimation for fault detection and diagnosis[J]. Journal of Guidance, Control, and Dynamics, 2015, 38 (8): 1409- 1425. |
| 17 | MARZAT J, PIET-LAHANIER H, DAMONGEOT F, et al. Model based fault diagnosis for aerospace systems: a survey[J]. Journal of Aerospace Engineering, 2012, 226 (10): 1329- 1360. |
| 18 | 李霓, 布树辉, 尚柏林, 等. 飞行器智能设计愿景与关键问题[J]. 航空学报, 2021, 42 (4): 213- 230. |
| LI N, BU S H, SHANG B L, et al. Vision and key issues of intelligent aircraft design[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42 (4): 213- 230. | |
| 19 | 王冲. 组合导航系统故障诊断方法集成与系统设计[D]. 哈尔滨: 哈尔滨工程大学, 2011. |
| WANG C. Integration of fault diagnosis methods and system design for integrated navigation systems[D]. Harbin: Harbin Engineering University, 2011. | |
| 20 |
SUN R, CHENG Q, WANG G Y, et al. A novel online data-driven algorithm for detecting UAV navigation sensor faults[J]. Sensors, 2017, 17 (10): 2243.
doi: 10.3390/s17102243 |
| 21 | XU H W, LIAN B W. Fault detection for multi-source integrated navigation system using fully convolutional neural network[J]. IET Radar, Sonar & Navigation, 2018, 12(7): 774−782. |
| 22 | 张涛, 徐晓苏. 基于C-SVM的组合导航系统故障诊断算法[J]. 中国惯性技术学报, 2011, 19 (2): 239- 242. |
| ZHANG T, XU X S. Fault diagnosis algorithm for integrated navigation system based on C-SVM[J]. Journal of Chinese Inertial Technology, 2011, 19 (2): 239- 242. | |
| 23 | BADU R, WANG J L. Comparative study of interpolation techniques for ultra-tight integration of GPS/INS/PL sensors[J]. Journal of Global Positioning Systems, 2005, 4 (1): 192- 200. |
| 24 | 张捍卫, 许厚泽, 王爱生. 天球参考系与地球参考系之间的坐标转换研究进展[J]. 测绘科学, 2005, 30 (5): 105- 109. |
| ZHANG H W, XU H Z, WANG A S. Research progress on coordinate transformation between celestial and terrestrial reference frames[J]. Science of Surveying and Mapping, 2005, 30 (5): 105- 109. | |
| 25 |
LU P, KAMPEN E J V, VISSER C D, et al. Nonlinear aircraft sensor fault reconstruction in the presence of disturbances validated by real flight data[J]. Control Engineering Practice, 2016, 49, 112- 128.
doi: 10.1016/j.conengprac.2016.01.012 |
| 26 | 吴松伦. 基于迭代扩展卡尔曼滤波的目标跟踪算法研究[D]. 西安: 西北师范大学, 2021. |
| WU S L. Research on target tracking algorithm based on iterative extended Kalman filter[D]. Xi’an: Northwest Normal University, 2021. | |
| 27 |
YANG Z B, CHENG B, LV C X, et al. Fuzzy neural network dynamic inverse control strategy for quadrotor UAV based on atmospheric turbulence[J]. Applied Sciences, 2022, 12 (23): 12232.
doi: 10.3390/app122312232 |
| 28 |
HASHEMI M, SHAMI E. New fault detection and fault-tolerant scheme for Doppler velocity logger outage in ocean navigation systems[J]. The Journal of Navigation, 2021, 74 (2): 409- 424.
doi: 10.1017/S0373463320000752 |
| 29 | MAQSOOD H, TAIMOOR M, ULLAH Z, et al. Novel sensor fault detection and isolation for an unmanned aerial vehicle[C]//Proc. of the International Bhurban Conference on Applied Sciences and Technologies, 2021: 486−493. |
| 30 |
GAO D Z, PENG J, LU Y Y, et al. Sensor fault diagnosis of locomotive electro-pneumatic brake using an adaptive unscented Kalman filter[J]. Journal of Sensors, 2021, 2021 (1): 5407817.
doi: 10.1155/2021/5407817 |
| 31 |
LI D L, WANG Y, WANG J X, et al. Recent advances in sensor fault diagnosis: a review[J]. Sensors and Actuators A: Physical, 2020, 309, 111990.
doi: 10.1016/j.sna.2020.111990 |
| [1] | Zhihao WANG, Weichao ZHONG, Hao ZHANG. Nonsingular mean elements estimation algorithm for LEO satellites [J]. Systems Engineering and Electronics, 2025, 47(10): 3411-3425. |
| [2] | Dong ZHANG, Fuyi XING, Yunhe XU, Peng QIAN. Airborne inertial navigation system/radar integrated navigation method based on dual-mode switching [J]. Systems Engineering and Electronics, 2024, 46(8): 2770-2778. |
| [3] | Yue LENG, Sheng ZHONG. Compensation method for gravity disturbance in celestial/inertial integrated system [J]. Systems Engineering and Electronics, 2024, 46(4): 1357-1363. |
| [4] | Hongjin ZHOU, Hui SONG, Wenliang FAN, Su WANG, Dongliang GU. Ship inertial navigation system position correction method based on Bayesian neural network [J]. Systems Engineering and Electronics, 2024, 46(4): 1393-1400. |
| [5] | Zhengyang LIU, Li ZHOU, Rui ZHANG. Attitude control of hypersonic vehicle with random parameter perturbations [J]. Systems Engineering and Electronics, 2024, 46(2): 703-714. |
| [6] | Yingfei XIAO, Haiying LIU, Yuehua CHENG, Tiexiang LI. Fault diagnosis method of air data sensor based on double-model adaptive estimation [J]. Systems Engineering and Electronics, 2024, 46(11): 3792-3799. |
| [7] | Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters [J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913. |
| [8] | Yiping DONG, Ning LIU, Zhong SU, Jingxiao WANG, Hongyang BAI. Integrated navigation method of high-speed spinning flying bodybased on AEKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1977-1983. |
| [9] | Wenhua LI, Lixin WANG, Qiang SHEN, Can LI, Zongshou WU. MEMS-INS/GNSS/VO integrated navigation method based on robust EKF [J]. Systems Engineering and Electronics, 2022, 44(6): 1994-2000. |
| [10] | Yang LI, Meng LIU, Jing GONG, Yongzhao WANG, Fujian DENG. Double-velocity inertial-frame alignment algorithm with pseudo INS modeling in polar regions [J]. Systems Engineering and Electronics, 2022, 44(5): 1677-1684. |
| [11] | Zhaoqiang SUN, Zhigui WANG, Fei MENG, Luyu LI, Zhong YU, Yan CHEN. Ballistic target tracking filter design based on EKF and ballistic equations [J]. Systems Engineering and Electronics, 2022, 44(10): 3207-3212. |
| [12] | Zhizhong LIAO, Qi WANG. Influence and countermeasures of radar seeker pointing error on missile guidance [J]. Systems Engineering and Electronics, 2021, 43(2): 519-525. |
| [13] | Shiwen HAO, Zhili ZHANG, Zhaofa ZHOU, Zhenjun CHANG, Xianyi LIU. Influence of gravity disturbance on initial alignment of inertial navigation system [J]. Systems Engineering and Electronics, 2020, 42(7): 1575-1581. |
| [14] | Xiaolong WANG, Haiying LIU, Jingqi WANG. Collaborative navigation of air-ground multi-agent based on hierarchical SLAM [J]. Systems Engineering and Electronics, 2020, 42(1): 166-171. |
| [15] | YUAN Guogang, WANG Yongchuan, CHEN Peng, GAO Xijun. Demodulation of CD3S signals based on DEKF joint estimation [J]. Systems Engineering and Electronics, 2018, 40(9): 2119-2123. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||