Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (12): 3675-3682.doi: 10.12305/j.issn.1001-506X.2021.12.31
• Guidance, Navigation and Control • Previous Articles Next Articles
Fast steering mirror ADRC based on improved particle swarm optimizer
Jinxin FENG*, Yalei WANG, Qiang WANG, Biao XU
- College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
-
Received:2020-12-09Online:2021-11-24Published:2021-11-30 -
Contact:Jinxin FENG
CLC Number:
Cite this article
Jinxin FENG, Yalei WANG, Qiang WANG, Biao XU. Fast steering mirror ADRC based on improved particle swarm optimizer[J]. Systems Engineering and Electronics, 2021, 43(12): 3675-3682.
share this article
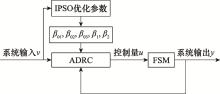
Fig.1
Structure diagram of FSM control system"
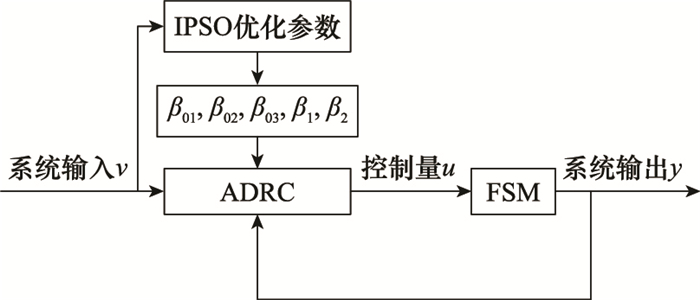
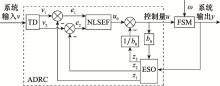
Fig.2
Structure diagram of ADRC"
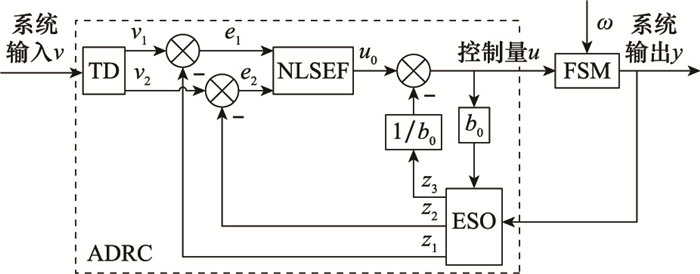
Fig.3
Versoria function"

Table 1
Test results for 5 different test functions"
| 函数名 | 理论最小值 | 平均值 | 最小值 | |||||||
| IPSO | PSO | DA | GA | IPSO | PSO | DA | GA | |||
| Rastrigion | 0 | 9.894 9×10-10 | 0.079 8 | 0.265 4 | 0.001 4 | 0 | 9.851 2×10-6 | 0 | 3.438 4×10-8 | |
| Schaffer | 0 | 0.001 7 | 0.004 9 | 0.005 5 | 0.001 5 | 0 | 8.619 4×10-6 | 0 | 5.605 5×10-12 | |
| Rosenbrock | 0 | 0.007 8 | 0.617 1 | 3.097 5 | 0.113 2 | 1.486 1×10-15 | 0.005 5 | 8.803 8×10-4 | 0.001 2 | |
| Sphere | 0 | 0 | 3.924 6×10-5 | 0 | 5.635 8×10-6 | 0 | 1.944 0×10-7 | 0 | 2.548 4×10-9 | |
| Beale | 0 | 2.506 5×10-16 | 1.707 6×10-4 | 0.069 3 | 0.002 3 | 0 | 3.306 1×10-8 | 0 | 5.449 8×10-10 | |
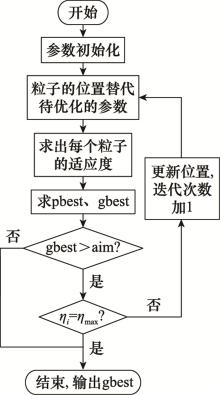
Fig.4
ADRC flow chart of IPSO algorithm optimizarion"

Fig.5
Satellite platfrom vibration simulation signal and its amplitude frequency response"
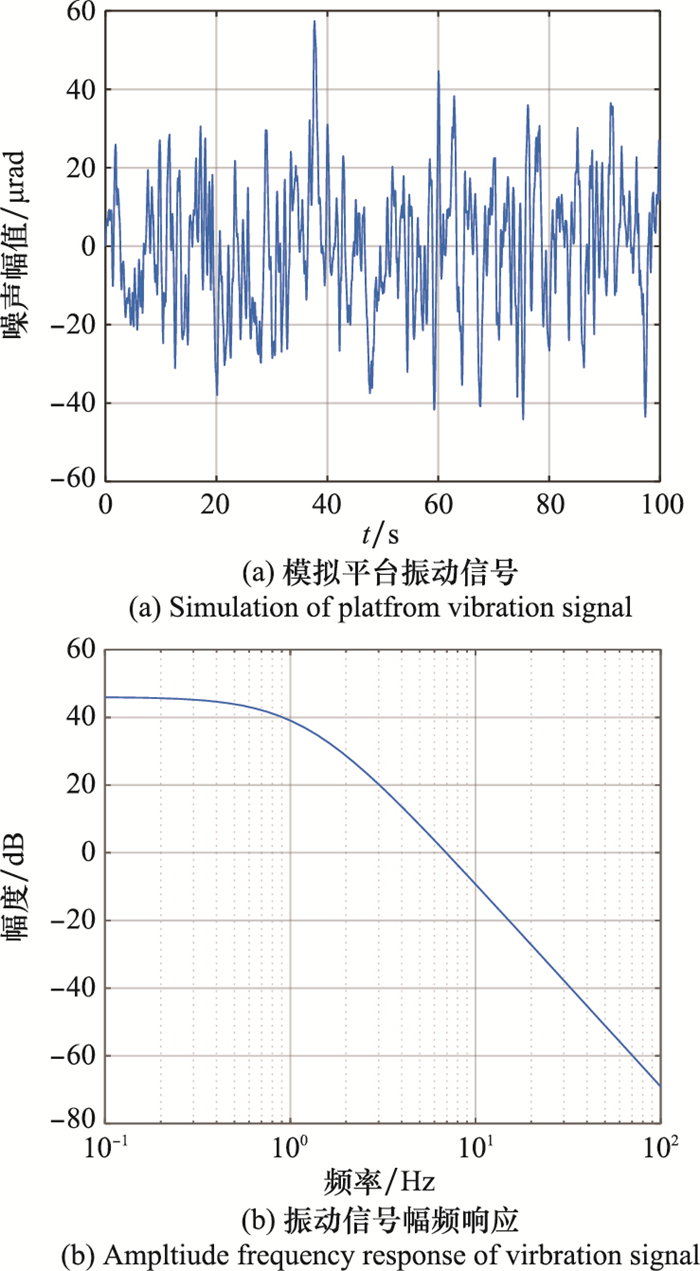
Table 2
Five parameters and the minimum fitness obtained by the two algorithms(FSM tracking hight frequency sinusoidal signal)"
| 算法 | β01 | β02 | β03 | β1 | β2 | minfit |
| IPSO | 14 509.755 4 | 2.233 1×108 | 8.117 5×1011 | 97.045 6 | 0.081 6 | 1.143 8×10-9 |
| PSO | 10 688.412 9 | 1.728 3×108 | 9.554 8×1011 | 135.420 0 | 0.120 0 | 3.347 9×10-9 |
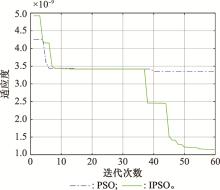
Fig.6
Process of fitness value changing with number of iterations"
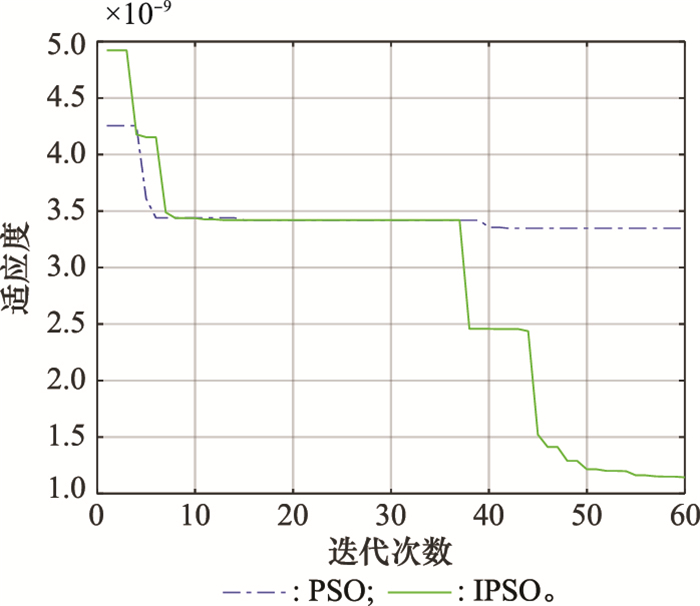
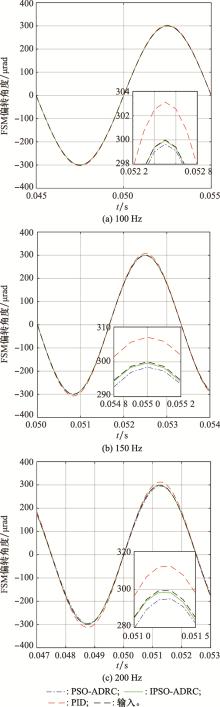
Fig.7
Given and feedback comparison chart when tracking sine signals of different frequencies"
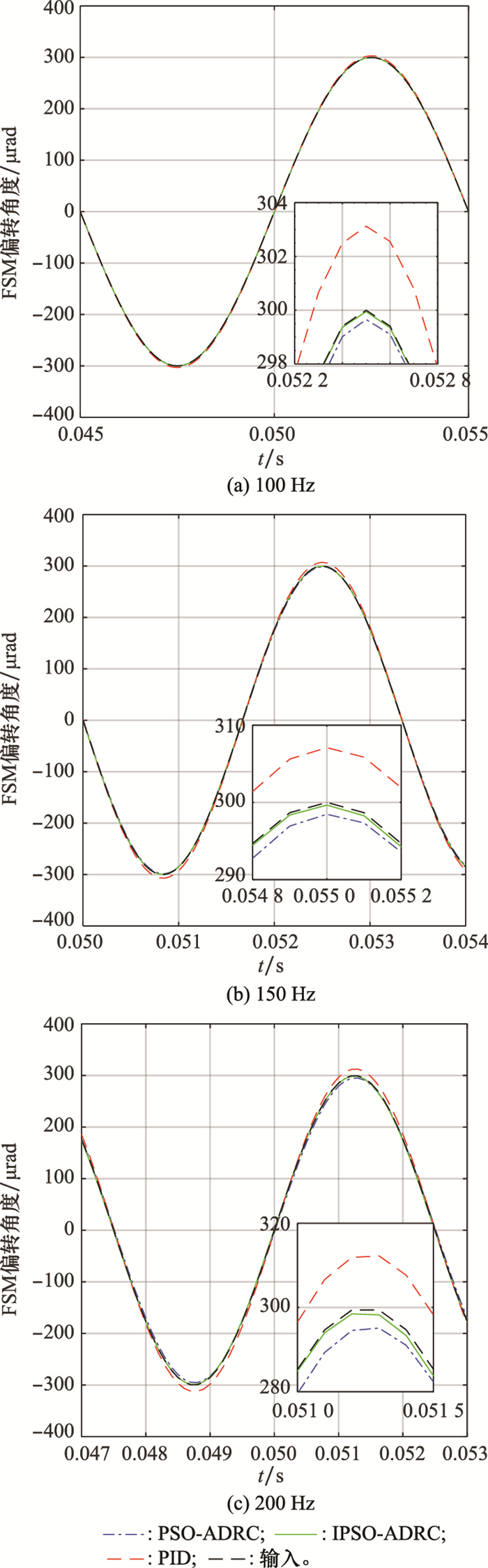
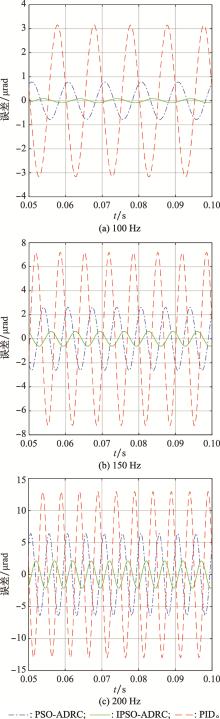
Fig.8
Steady-state error comparison chart when tracking sinusoidal signals of different frequencies"

Table 3
Maximun steady state error μrad"
| 算法 | 100 Hz | 150 Hz | 200 Hz |
| IPSO-ADRC | 0.085 | 0.616 | 2.129 |
| PSO-ADRC | 0.779 | 2.624 | 6.384 |
| PID | 3.109 | 6.991 | 12.503 |
| 1 |
ZHENG X T , HUANG H , LI W P . A modified active disturbance rejection control for fast steering mirror in aerospace application[J]. Journal of Physics: Conference Series, 2020, 1509 (1): 012028.
doi: 10.1088/1742-6596/1509/1/012028 |
| 2 | LIN D, WU Y M, ZHU F. Research on precision tracking on fast steering mirror and control strategy[C]//Proc. of the International Conference on Power and Energy Engineering, 2018: 012009. |
| 3 | PEREIRA P D V , HUNWARDSEN M T , CAHOY K . Characterization of laser thermal loading on microelectromechanical sytems-based fast steering mirror in vacuum[J]. Optical Engineering, 2020, 59 (5): 056109. |
| 4 | ZHANG M, LIANG Y B. Compound tracking in ATP system for free space optical communication[C]//Proc. of the IEEE International Conference on Mechatronic Science, Electric Engineering and Computer, 2011: 454-456. |
| 5 |
LIU W , YAO K N , HUANG D N , et al. Performance evaluation of coherent free space optical communications with a double-stage fast-steering-mirror adaptive optics system depending on the Greenwood frequency[J]. Optics Express, 2016, 24 (12): 13288- 13302.
doi: 10.1364/OE.24.013288 |
| 6 |
DONG Z C , JIANG A M , DAI Y F , et al. Space-qualified fast steering mirror for an image stabilization system of space astronomical telescopes[J]. Applied Optics, 2018, 57 (31): 9307- 9315.
doi: 10.1364/AO.57.009307 |
| 7 | WILLIAMS R J , KITZLER O , BAI Z X , et al. High power diamond Raman lasers[J]. IEEE Journal of Selected Topics in Quantum Electronics, 2018, 24 (5): 1602214. |
| 8 | 邹紫盛, 丛爽, 尚伟伟, 等. 量子定位中精跟踪系统状态滤波及控制器设计[J]. 系统工程与电子技术, 2019, 41 (3): 601- 610. |
| ZOU Z S , CONG S , SHANG W W , et al. State filtering and controller design for fine tracking system in quantum positioning[J]. Systems Engineering and Electronics, 2019, 41 (3): 601- 610. | |
| 9 |
赵继庭, 金刚石, 高旭辉. 基于快速反射镜的模糊自适应PID控制算法研究[J]. 激光与红外, 2018, 48 (6): 756- 761.
doi: 10.3969/j.issn.1001-5078.2018.06.016 |
|
ZHAO J T , JIN G S , GAO X H . Fuzzy adaptive PID control algorithm based on fast steering mirror[J]. Laser & Infrared, 2018, 48 (6): 756- 761.
doi: 10.3969/j.issn.1001-5078.2018.06.016 |
|
| 10 | CHEN C , CAO H B , DING L , et al. Trajectory tracking control of WMRs with lateral and longitudinal slippage based on active disturbance rejection control[J]. Robotics and Autonomous Systems, 2018, 140 (107): 236- 245. |
| 11 | WANG K D, SU X Q, LI Z, et al. ADRC system of FSM for image motion compensation[C]//Proc. of the 2nd International Conference on Photonics and Optical Engineering, 2017: 1025604. |
| 12 | DONG Q R , LIU Y K , ZHANG Y L , et al. Improved ADRC with ILC control of a CCD-based tracking loop for fast steering mirror system[J]. IEEE Photonics Journal, 2018, 10 (4): 6601314. |
| 13 | 黄浦, 杨秀丽, 修吉宏, 等. 音圈致动快速反射镜的降阶自抗扰控制[J]. 光学精密工程, 2020, 28 (6): 1365- 1374. |
| HUANG P , YANG X L , XIU J H , et al. Reduced-order active disturbance rejection control of fast steering mirror driven by VCA[J]. Optics and Precision Engineering, 2020, 28 (6): 1365- 1374. | |
| 14 | CUI N, LIU Y, CHEN X I, et al. Active disturbance rejection controller of fine tracking system for IREE space optical communication[C]//Proc. of the Society of Photo Optical Instrumentation Engineers Conference, 2013: 890613. |
| 15 |
LIU J J , SUN M W , CHEN Z Q , et al. High AOA decoupling control for aircraft based on ADRC[J]. Journal of Systems Engineering and Electronics, 2020, 31 (2): 393- 402.
doi: 10.23919/JSEE.2020.000016 |
| 16 |
YANG R G , SUN M W , CHEN Z Q . Active disturbance rejection control on first-order plant[J]. Journal of Systems Engineering and Electronics, 2011, 22 (1): 95- 102.
doi: 10.3969/j.issn.1004-4132.2011.01.012 |
| 17 | WANG Y Q , ZHANG G C , SHI Z B , et al. Finite-time speed control of marine diesel engine based on ADRC[J]. Mathematical Problems in Engineering, 2020, 2709460. |
| 18 |
HAN J Q . From PID to active disturbance rejection control[J]. IEEE Trans.on Industrial Electronics, 2009, 56 (3): 900- 906.
doi: 10.1109/TIE.2008.2011621 |
| 19 | KENNEDY J, EBERHART R. Particle swarm optimization[C]//Proc. of the IEEE lnternational Conference on Neural Networks, 1995: 1942-1948. |
| 20 |
AKKOUCHE N , BALISTROU M , LOUB-AR K , et al. Pyrolysis polybutadiene model including self-heating and self-cooling effects: kinetic study via particle swarm optimization[J]. Waste and Biomass Valorization, 2020, 11 (2): 653- 667.
doi: 10.1007/s12649-018-0538-9 |
| 21 |
LI H Z , WANG Y . Particle swarm optimization for rigid body reconstruction after micro-Doppler removal in radar analysis[J]. Journal of Systems Engineering and Electronics, 2020, 31 (3): 488- 499.
doi: 10.23919/JSEE.2020.000023 |
| 22 |
ZHANG X L , TAN Y J , YANG Z W . Resource allocation optimization of equipment development task based on MOPSO algorithm[J]. Journal of Systems Engineering and Electronics, 2019, 30 (6): 1132- 1143.
doi: 10.21629/JSEE.2019.06.09 |
| 23 | XU Z , ZHANG E Z , CHEN Q W . Rotary unmanned aerial vehicles path planning in rough terrain based on multi-objective particle swarm optimization[J]. Journal of Systems Engineering and Electronics, 2020, 31 (1): 130- 141. |
| 24 |
WANG Q Q , LI Z D , WANG W W , et al. Multi-objective optimization design of wheat centralized seed feeding device based on particle swarm optimization (PSO) algorithm[J]. International Journal of Agricultural and Biological Engineering, 2020, 13 (6): 76- 84.
doi: 10.25165/j.ijabe.20201306.5665 |
| 25 | SHI Y H, EBERHART R. A modified particle swarm optimizer[C]//Proc. of the IEEE World Congress on Computational Intelligence, 1998: 69-73. |
| 26 | 南杰琼, 王晓东. 改进惯性权值的粒子群优化算法[J]. 西安工程大学学报, 2017, 31 (6): 836- 838. |
| NAN J Q , WANG X D . Particle swarm optimization algorithm with improved inertia weight[J]. Journal of Xi'an Polytechnic University, 2017, 31 (6): 836- 838. | |
| 27 | 张继荣, 张天. 基于改进粒子群算法的PID控制参数优化[J]. 计算机工程与设计, 2020, 41 (4): 1035- 1040. |
| ZHANG J R , ZHANG T . Optimization of PID control parameters based on improved particle group algorithm[J]. Computer Engineering and Design, 2020, 41 (4): 1035- 1040. | |
| 28 | ZHANG G H , HU Y F , SUN J H , et al. An improved genetic algorithm for the flexible job shop scheduling problem with multiple time constraints[J]. Swarm and Evolutionary Computation, 2020, 54 (4): 100664. |
| 29 |
MIRJALILI S . Dragonfly algorithm: a new meta-heuristic optimization technique for solving single-objective, discrete, and multi-objective problems[J]. Neural Computing and Applications, 2016, 27 (4): 1053- 1073.
doi: 10.1007/s00521-015-1920-1 |
| 30 | WITTING M, VAN H L, TUNBRIDGE D E L, et al. In-orbit measurements of micro accelerations of ESA's communication satellite Olympus[C]//Proc. of the Free-Space Laser Communication Technologies Ⅱ, 1990: 205-214. |
| [1] | Jianfeng YANG, Heye XIAO, Liang LI, Junqiang BAI, Weihao DONG. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism [J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. |
| [2] | Junlong LI, Songzhou LI, Di ZHOU. Optimization method for three-impulse rendezvous under multi-constraints [J]. Systems Engineering and Electronics, 2022, 44(8): 2612-2620. |
| [3] | Lu ZHUANG, Zhong LU, Haijing SONG, Jia ZHOU. An optimization method for development assurance level assignment of airborne system [J]. Systems Engineering and Electronics, 2022, 44(8): 2688-2698. |
| [4] | Fa WEI, Minglei YANG, Xiaojing HE, Dingsen ZHOU, Baixiao CHEN. Simultaneous multi-beam forming method for planar array based on improved particle swarm algorithm [J]. Systems Engineering and Electronics, 2022, 44(6): 1789-1797. |
| [5] | Pengyu CAO, Chengzhi YANG, Limeng SHI, Hongchao WU. Unknown radar signal processing based on PSO-DBSCAN and SCGAN [J]. Systems Engineering and Electronics, 2022, 44(4): 1158-1165. |
| [6] | Siyu DU, Yinghui QUAN, Minghui SHA, Wen FANG, Mengdao XING. Waveform optimization for SFA radar based on evolutionary particle swarm optimization [J]. Systems Engineering and Electronics, 2022, 44(3): 834-840. |
| [7] | Chenrui SHI, Lu TIAN, Zhan XU, Ruxin ZHI, Jinhui CHEN. Effectiveness evaluation method of emergency communication and sensing equipment based on PSO-BP [J]. Systems Engineering and Electronics, 2022, 44(11): 3455-3462. |
| [8] | Fuyu LU, Ningning TONG, Weike FENG, Pengcheng WAN. Adaptive hybrid annealing particle swarm optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(11): 3470-3476. |
| [9] | Haoyang LI, Jianjun XIANG, Fang PENG, Shuai WANG, Zhijun LI. Beam space generalized sidelobe canceller algorithm based on particle swarm optimization [J]. Systems Engineering and Electronics, 2022, 44(10): 3037-3045. |
| [10] | Lei XIE, Dali DING, Zhenglei WEI, Andi TANG, Peng ZHANG. Real time prediction of maneuver trajectory for AdaBoost-PSO-LSTM network [J]. Systems Engineering and Electronics, 2021, 43(6): 1651-1658. |
| [11] | Kun WANG, Shuxian HOU, Li WANG. APU performance parameter prediction model based on adaptive variation PSO-SVM [J]. Systems Engineering and Electronics, 2021, 43(2): 526-536. |
| [12] | Shuai ZHAO, Songtao LIU, Huiyang WANG. LPI radar waveform recognition algorithm based on PSO-CNN [J]. Systems Engineering and Electronics, 2021, 43(12): 3552-3563. |
| [13] | Han LI, Honghai ZHANG, Liandong ZHANG, Hao LIU. Multiple logistics unmanned aerial vehicle collaborative task allocation in urban areas [J]. Systems Engineering and Electronics, 2021, 43(12): 3594-3602. |
| [14] | Xiaohai WANG, Xiuyun MENG, Chuanxu LI. Design of trajectory tracking controller for UAV based on MPC [J]. Systems Engineering and Electronics, 2021, 43(1): 191-198. |
| [15] | Jiuyang LI, Min HU, Xuyu WANG, Jiahui XU, Feifei LI. Optimal control method for low thrust deorbit of the low earth orbit satellite based on ALPSO algorithm [J]. Systems Engineering and Electronics, 2021, 43(1): 199-207. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||