
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (11): 3816-3825.doi: 10.12305/j.issn.1001-506X.2025.11.28
• 制导、导航与控制 • 上一篇
牟新刚1, 彭文凯1, 管叙军2,3,*, 付文兴3, 郝明瑞3
收稿日期:2024-12-18
出版日期:2025-11-25
发布日期:2025-12-08
通讯作者:
管叙军
作者简介:牟新刚(1982—),男,教授,博士,主要研究方向为红外成像、目标检测与跟踪、集群协同探测基金资助:Xingang MOU1, Wenkai PENG1, Xujun GUAN2,3,*, Wenxing FU3, Mingrui HAO3
Received:2024-12-18
Online:2025-11-25
Published:2025-12-08
Contact:
Xujun GUAN
摘要:
飞行器集群自身的高精度定位是执行协同任务的必要前提,针对全球卫星导航系统(Global Navigation Satellite System,GNSS)拒止且环境特征信息受限的多目标协同探测场景,利用集群内数据链仅测距以及对多目标的探测信息,提出一种基于目标群拓扑特征的协同定位方法。通过多维标度(multidimensional scaling,MDS)构建数据链测距多面体,根据目标群三维拓扑特征对目标关联并建立相对定位最优化模型,利用带压缩因子的改进粒子群优化(particle swarm optimization,PSO)算法获取测距多面体姿态的最优解。仿真结果表明,能够获得较高的集群相对定位精度,同时结合惯性导航系统(inertial navigation system,INS)位置输出提升了飞行器集群的绝对位置精度。
中图分类号:
牟新刚, 彭文凯, 管叙军, 付文兴, 郝明瑞. 基于目标群拓扑特征的飞行器集群相对定位[J]. 系统工程与电子技术, 2025, 47(11): 3816-3825.
Xingang MOU, Wenkai PENG, Xujun GUAN, Wenxing FU, Mingrui HAO. Relative positioning of aircraft cluster based on topological features of target group[J]. Systems Engineering and Electronics, 2025, 47(11): 3816-3825.

图1
相对定位模型示意图"
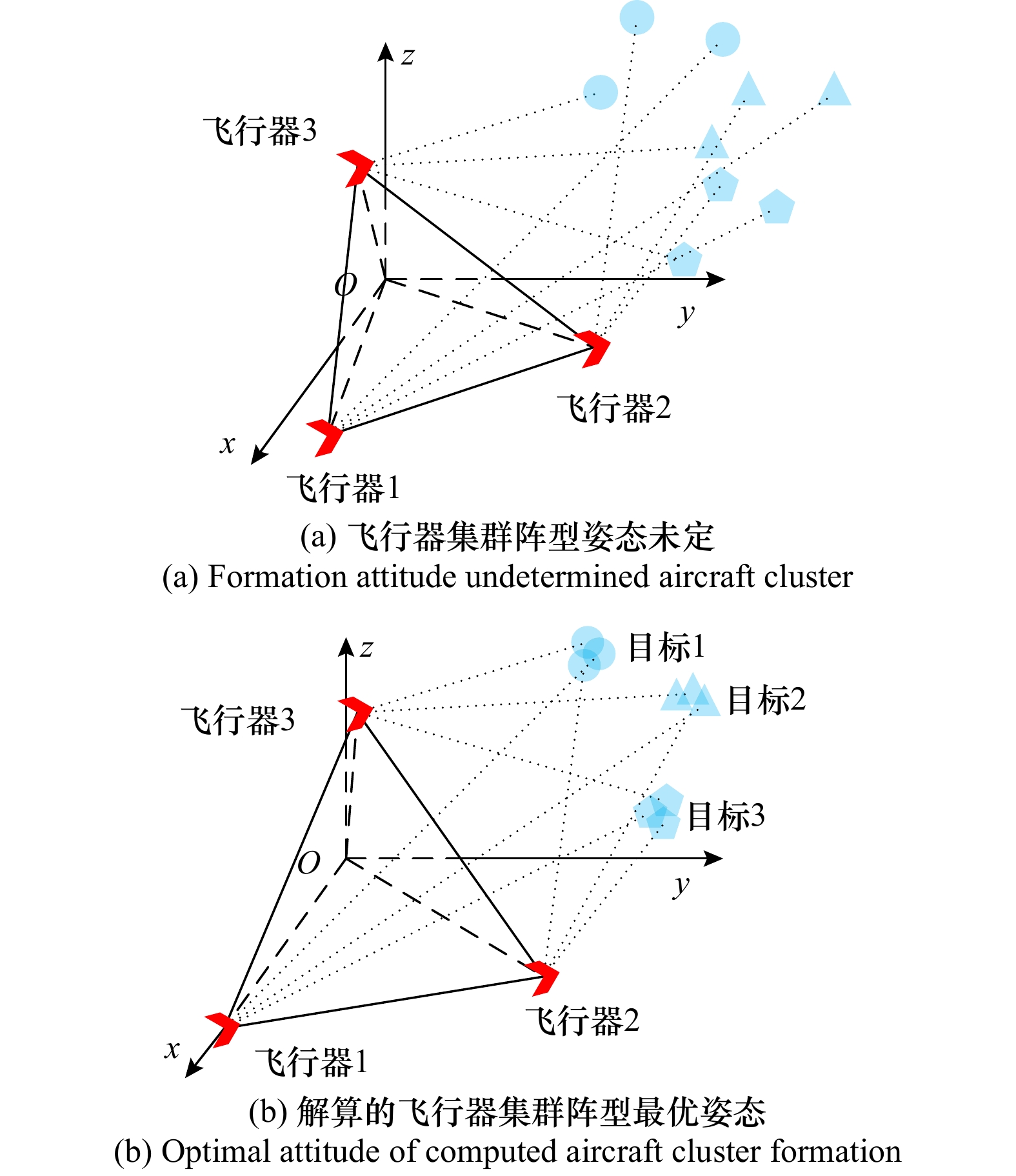
表1
误差项设置"
| 误差项 | ||||||
| 标准差 | 0.12 | 0.08 | 20 | 0.50 | 0.50 | 50 |

图2
目标群位置分布"
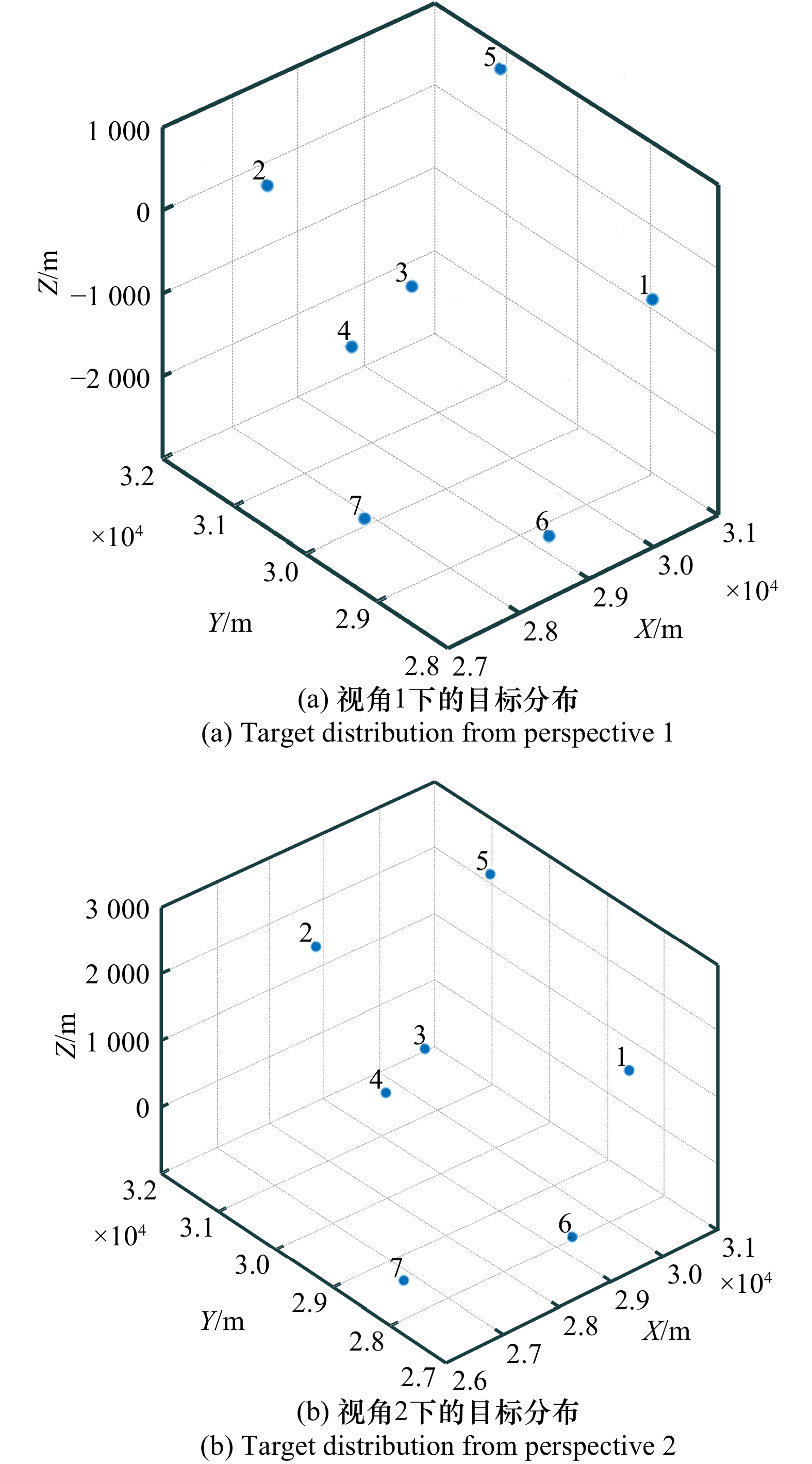

图3
目标1在飞行器视角1下的拓扑特征描述子"
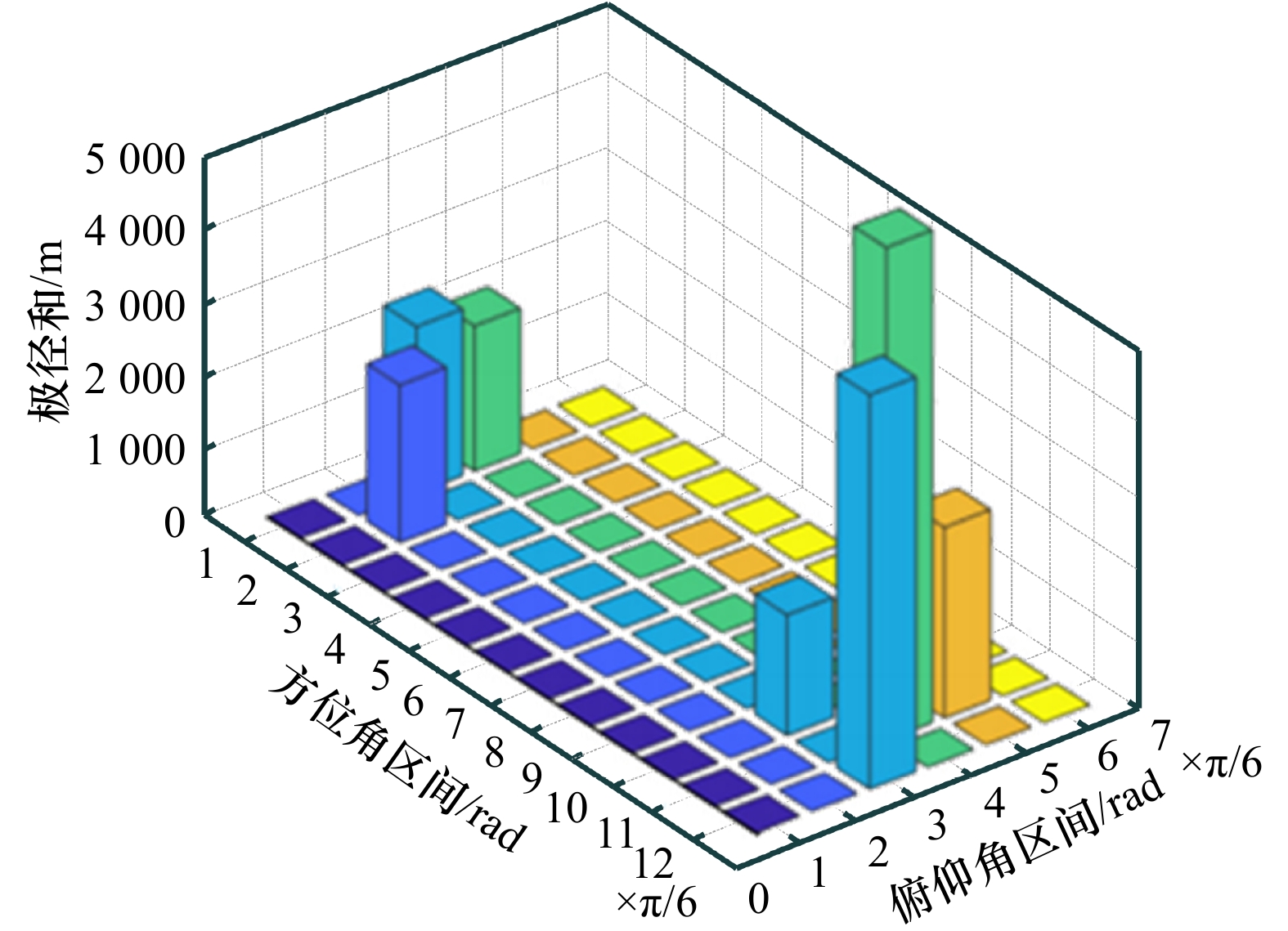

图4
目标1在飞行器视角2下的拓扑特征描述子"

表2
相似度矩阵"
| 编号 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1 | 0.91 | 0.53 | 0.72 | 0.42 | 0.47 | 0.56 | 0.68 |
| 2 | 0.57 | 0.92 | 0.54 | 0.63 | 0.42 | 0.48 | 0.54 |
| 3 | 0.58 | 0.33 | 0.91 | 0.21 | 0.43 | 0.50 | 0.77 |
| 4 | 0.58 | 0.66 | 0.35 | 0.92 | 0.36 | 0.46 | 0.41 |
| 5 | 0.39 | 0.30 | 0.53 | 0.30 | 0.88 | 0.70 | 0.60 |
| 6 | 0.38 | 0.35 | 0.44 | 0.33 | 0.45 | 0.81 | 0.56 |
| 7 | 0.62 | 0.50 | 0.85 | 0.41 | 0.72 | 0.64 | 0.94 |
表3
基于拓扑特征的关联概率分配结果"
| 视角1下的目标编号 | 视角2下的关联对象/关联概率 |
| 1 | 1/0.56,4/0.44 |
| 2 | 2/1.00 |
| 3 | 3/0.54,7/0.46 |
| 4 | 4/1.00 |
| 5 | 5/0.56,6/0.44 |
| 6 | 6/1.00 |
| 7 | 3/0.34,5/0.29,7/0.37 |

图5
目标关联性能曲线"


图6
适应度进化曲线"

表4
5种PSO算法的性能"
| 算法 | ||||||
| 基础PSO | 4 171.996 | 4 624.603 | 66.780 | 24.992 | 0.359 | 0.134 |
| 标准PSO | 2 728.829 | 6 376.173 | 178.070 | 31.148 | 0.954 | 0.165 |
| 压缩因子PSO | 1 756.769 | 4 646.954 | 120.820 | 20.487 | 0.638 | 0.110 |
| 自适应惯性权重的混合PSO | 2 569.188 | 5 966.492 | 152.740 | 23.087 | 0.818 | 0.122 |
| 动态调整惯性权重的PSO | 1 798.137 | 5 259.375 | 189.900 | 28.512 | 1.082 | 0.162 |
表5
粗遍历后5种粒子群算法性能"
| 算法 | ||||||
| 基础PSO | 595.867 | 396.302 | 66.475 | 21.560 | 0.336 | 0.128 |
| 标准PSO | 0.000 | 0.000 | 182.170 | 4.638 | 0.910 | 0.115 |
| 压缩因子PSO | 0.000 | 0.000 | 96.395 | 4.312 | 0.528 | 0.077 |
| 自适应惯性权重的混合PSO | 4.692 | 57.738 | 152.115 | 5.813 | 0.765 | 0.111 |
| 动态调整惯性权重的PSO | 16.905 | 161.072 | 196.875 | 20.046 | 1.055 | 0.164 |
表6
飞行器集群与目标群初始位置分布"
| 对象 | |||
| 飞行器 | [0,5] | [0,5] | [5,10] |
| 目标 | [30,35] | [30,35] | [5,10] |

图7
角度误差曲线"

表7
三个基向量角度的均方根误差"
| 参数 | 分布距离/m | ||||
| [1.909,1.847,1.975] | [0.984,0.829,0.947] | [0.604,0.614,0.631] | [0.384,0.376,0.385] | ||
| [2.183,1.981,1.908] | [1.036,0.940,0.959] | [0.659,0.572,0.676] | [0.434,0.405,0.384] | ||
| [2.275,1.800,2.248] | [0.948,0.923,0.970] | [0.591,0.583,0.597] | [0.442,0.398,0.439] | ||
| [2.035,1.726,1.956] | [0.881,0.801,0.869] | [0.649,0.601,0.598] | [0.395,0.367,0.408] | ||

图8
飞行器集群绝对定位结果"
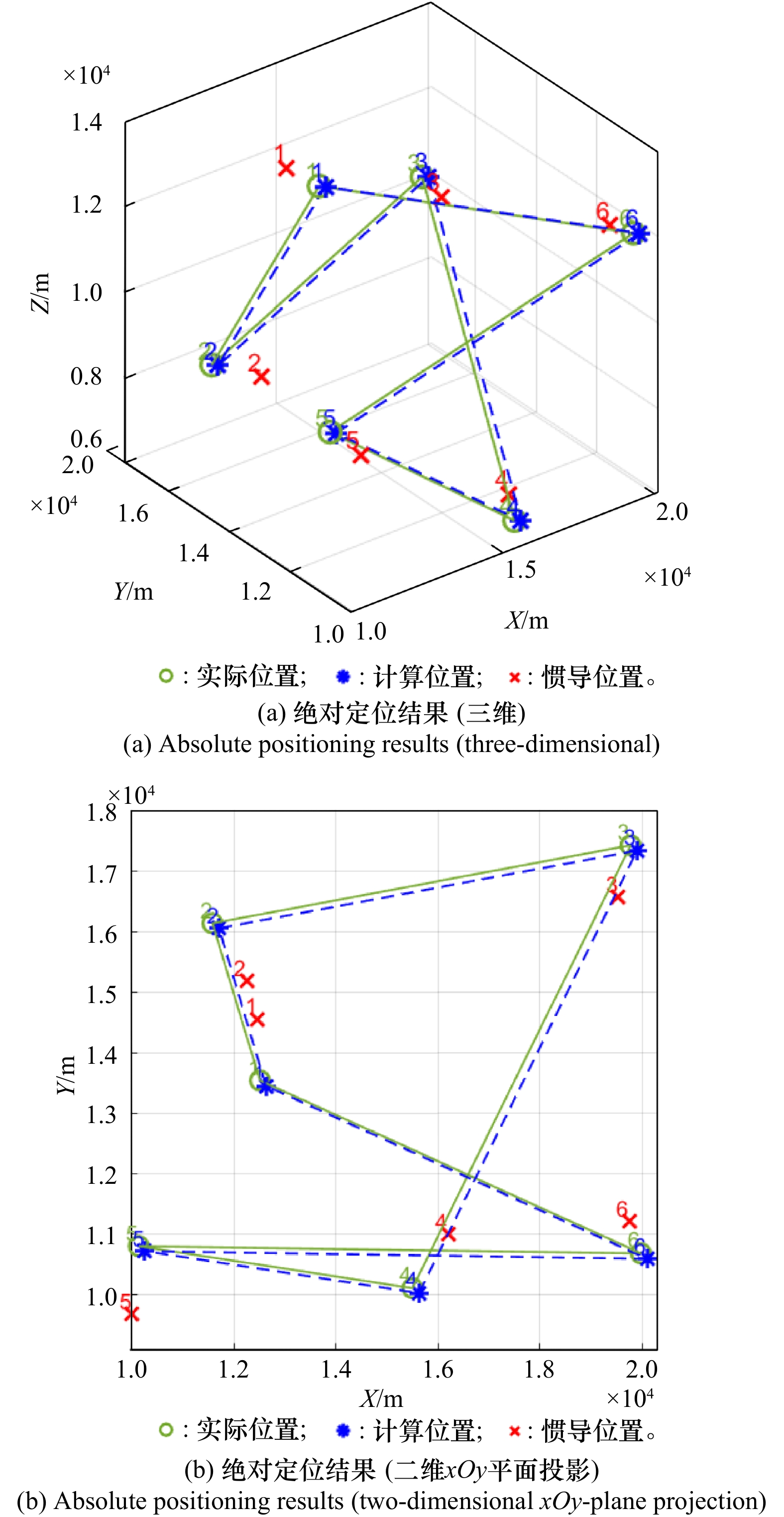
表8
误差修正结果"
| 节点 | ||||||
| 1 | −43.650 | 114.609 | −87.193 | −34.083 | −7.096 | |
| 2 | 676.378 | 128.276 | −958.789 | −81.230 | −11.314 | −6.544 |
| 3 | −237.013 | 125.531 | −858.570 | −87.963 | 2.934 | 13.944 |
| 4 | 700.412 | 128.895 | 887.410 | −81.721 | 9.436 | −3.688 |
| 5 | −127.239 | 121.779 | −81.727 | 28.650 | −15.505 | |
| 6 | −232.733 | 117.065 | 528.499 | −89.980 | −7.150 | 7.363 |
表9
绝对定位精度平均提升倍数"
| 节点数量 | 5 | 6 | 7 | 8 |
| 精度提升倍数 | 3.871 | 4.064 | 4.331 | 4.585 |
| 1 |
刘钢, 汤俊, 刘陈, 等. 无人飞行器集群协同行为建模技术综述[J]. 系统工程与电子技术, 2021, 43 (8): 2221- 2231.
doi: 10.12305/j.issn.1001-506X.2021.08.24 |
|
LIU G, TANG J, LIU C, et al. Survey of cooperative behavior modeling technology for unmanned aerial vehicles clusters[J]. Systems Engineering and Electronics, 2021, 43 (8): 2221- 2231.
doi: 10.12305/j.issn.1001-506X.2021.08.24 |
|
| 2 | ZOU Y F, PAGILLA R P, RATLIFF T R. Distributed formation flight control using constraint forces[J]. Journal of Guidance, Control, and Dynamics, 2012, 32 (1): 112- 120. |
| 3 |
EULALIA B, PASQUALE D, LUCA V D, et al. Sensors and measurements for unmanned systems: an overview[J]. Sensors, 2021, 21 (4): 1518.
doi: 10.3390/s21041518 |
| 4 | SHEN J W, WANG S Z, ZHAI Y W, et al. Cooperative relative navigation for multi-UAV systems by exploiting GNSS and peer-to-peer ranging measurements [J]. IET Radar, Sonar & Navigation, 2020, 15(1): 21−36. |
| 5 | 李坤, 布树辉, 贾旋, 等. 基于惯性导航与数据链的飞机间相对定位方法[J]. 航空学报, 2024, 45 (15): 268- 280. |
| LI K, BU S H, JIA X, et al. Relative aircraft positioning based on inertial navigation and datalink[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45 (15): 268- 280. | |
| 6 | 赖玮清, 万九卿. 基于路径和算法的飞行器集群分布式相对定位[J]. 航空学报, 2024, 45 (4): 219- 233. |
| LAI W Q, WAN J Q. Distributed relative positioning of aircraft group based on path-sum algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45 (4): 219- 233. | |
| 7 |
DI C L, GUO X Z. Topology perception and relative positioning of UAV swarm formation based on low-rank optimization[J]. Aerospace, 2024, 11 (6): 466.
doi: 10.3390/aerospace11060466 |
| 8 | 刘俊成, 张京娟, 冯培德. 基于相互测距信息的机群组网协同定位技术[J]. 北京航空航天大学学报, 2012, 38 (4): 541- 545. |
| LIU J C, ZHANG J J, FENG P D. Swarming aircraft collaborative localization based on mutual rangings[J]. Journal of Beijing University of Aeronautics and Astronautics, 2012, 38 (4): 541- 545. | |
| 9 | LIU W L, WU S T, WU X L. Relative navigation of missile formation and INS error correction methods[C]// Proc. of the 29th Chinese Control and Decision Conference, 2017: 1523−1529. |
| 10 | 钟日进, 陈琪锋. 利用集群内测距和对目标测向的协同定位方法[J]. 航空学报, 2020, 41 (S1): 140- 148. |
| ZHONG R J, CHEN Q F. Cooperative positioning method using distance measurement within a cluster and direction finding of a target[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S1): 140- 148. | |
| 11 | 于卓静, 孙永荣, 朱云峰, 等. 测角测距信息下的双机协同高精度定位算法[J]. 兵工自动化, 2019, 38 (2): 1- 5. |
| YU Z J, SUN Y R, ZHU Y F, et al. High precision algorithm of dual-aircraft cooperative locating with angle and distance information[J]. Ordnance Industry Automation, 2019, 38 (2): 1- 5. | |
| 12 | ZHANG S F, PAN X F, MU H. A multi-pedestrian cooperative navigation and positioning method based on UWB technology [C]//Proc. of the IEEE International Conference on Artificial Intelligence and Information Systems, 2020: 260−264. |
| 13 |
CAUSA F, FASANO G. Improving navigation in GNSS-challenging environments: multi-UAS cooperation and generalized dilution of precision[J]. IEEE Trans. on Aerospace and Electronic Systems, 2021, 57 (3): 1462- 1479.
doi: 10.1109/TAES.2020.3043543 |
| 14 |
ANSARI K. Cooperative position prediction: beyond vehicle-to-vehicle relative positioning[J]. IEEE Trans. on Intelligent Transportation Systems, 2020, 21 (3): 1121- 1130.
doi: 10.1109/TITS.2019.2902572 |
| 15 | VINCENZO C, ALEXEI H, SOONJO C. On-board cooperative spacecraft relative navigation fusing GNSS with vision [J]. Progress in Aerospace Sciences, 2022, 128: 100761. |
| 16 |
MARTELF M, SIDORENKO J, BODENSTEINER C, et al. Unique 4-DOF relative pose estimation with six distances for UWB/V-SLAM-based devices[J]. Sensors, 2019, 19 (20): 4366.
doi: 10.3390/s19204366 |
| 17 |
LEE B, SUNG S. A study on dual quaternion based cooperative relative navigation of multiple UAVs with monocular vision-inertial integration[J]. Chinese Journal of Aeronautics, 2024, 37 (11): 335- 354.
doi: 10.1016/j.cja.2024.06.021 |
| 18 |
GUY E, MENASHE A M, ROEI M, et al. Single transmitter direction finding using a single moving omnidirectional antenna[J]. Sensors, 2022, 22 (23): 9208.
doi: 10.3390/s22239208 |
| 19 |
TANG J W, CHANG T, JIANG Q L, et al. Time-of-arrival and angle-of-arrival measurement-assisted 3D inter-unmanned aerial vehicle relative localization under distance-dependent noise model[J]. Electronics, 2024, 14 (1): 90.
doi: 10.3390/electronics14010090 |
| 20 |
ZHENG Z X, WANG S, GONG B C, et al. Study on angle-only relative navigation for unmanned aerial vehicle formation in GPS-denied environment[J]. Proceedings of the Institution of Mechanical Engineers, 2023, 237 (10): 2252- 2265.
doi: 10.1177/09544100221149235 |
| 21 |
LIU H, CHEN J F, LIANG X L, et al. A compensation method of nonideal modulation pulse for direction finding with time-modulated array[J]. IEEE Antennas and Wireless Propagation Letters, 2022, 21 (8): 1577- 1581.
doi: 10.1109/LAWP.2022.3174424 |
| 22 | WANG S, HE C L, GONG B C, et al. Cooperative angles-only relative navigation algorithm for multi-spacecraft formation in close-range[J]. Computer Modeling in Engineering & Sciences, 2022, 134 (1): 121- 134. |
| 23 |
LI Q S, DONG Y, WANG D J, et al. Real-time precise DGNSS/INS integrated relative positioning with high output rate and low broadcast rate for kinematic-to-kinematic applications[J]. Remote Sensing, 2022, 14 (9): 2053.
doi: 10.3390/rs14092053 |
| 24 |
SUN C J, ZHANG Y G, WANG G Q, et al. A maximum correntropy divided difference filter for cooperative localization[J]. IEEE Access, 2018, 6, 41720- 41727.
doi: 10.1109/ACCESS.2018.2859391 |
| 25 |
XU B, LI S X, RAZZAQI A A, et al. Cooperative localization in harsh underwater environment based on the MC-ANFIS[J]. IEEE Access, 2019, 7, 55407- 55421.
doi: 10.1109/ACCESS.2019.2913039 |
| 26 | LI Z Y, DONG Y, XIANG X J, et al. Research on the influencing factors of relative positioning error of UAV group under distributed UWB [C]//Proc. of the 6th International Conference on Intelligent Computing and Signal Processing, 2021: 993−997. |
| 27 |
ZHANG H B, ZHANG H L, DI B Y, et al. MetaRadar: multi-target detection for reconfigurable intelligent surface aided radar systems[J]. IEEE Trans. on Wireless Communications, 2022, 21 (9): 6994- 7010.
doi: 10.1109/TWC.2022.3153792 |
| 28 |
DIAO P S, ALVES T, POUSSOT B, et al. A review of radar detection fundamentals[J]. IEEE Aerospace and Electronic Systems Magazine, 2024, 39 (9): 4- 24.
doi: 10.1109/MAES.2024.3442503 |
| 29 | 付昆, 田金文, 马懿超. 多特征融合的异视角目标关联算法[J]. 智能系统学报, 2020, 15 (5): 847- 855. |
| FU K, TIAN J W, MA Y C. Target association from different perspectives based on multi-feature fusion[J]. CAAI Transactions on Intelligent Systems, 2020, 15 (5): 847- 855. | |
| 30 |
LI X D, WU L Z, NIU Y F, et al. Multi-target association for UAVs based on triangular topological sequence[J]. Drones, 2022, 6 (5): 119.
doi: 10.3390/drones6050119 |
| [1] | 华子清, 魏明英, 李运迁, 柳立坤, 崔正达. 基于拦截概率的多弹区域协同覆盖制导方法[J]. 系统工程与电子技术, 2025, 47(6): 2015-2024. |
| [2] | 冯蕴雯, 许嘉炜, 路成, 薛小锋. 基于改进粒子群的民用飞机航材库存配置方法[J]. 系统工程与电子技术, 2025, 47(11): 3663-3671. |
| [3] | 于雷, 刘一品, 位寅生. 基于信干噪比最大化的盲提取抗主瓣干扰方法[J]. 系统工程与电子技术, 2024, 46(9): 2968-2979. |
| [4] | 席昕, 刘高高, 刘强, 黄东杰. 对旁瓣相消的分布式干扰优化布阵方法[J]. 系统工程与电子技术, 2024, 46(8): 2623-2628. |
| [5] | 刘成浩, 张晓林, 孙溶辰, 李铭. 基于改进粒子群的密度聚类算法混合矩阵估计[J]. 系统工程与电子技术, 2024, 46(7): 2211-2219. |
| [6] | 方智敬, 陈媛, 王俊杰. 改进的可见光通信系统PTS峰均比抑制方法[J]. 系统工程与电子技术, 2024, 46(7): 2509-2514. |
| [7] | 陶灿灿, 周锐. 面向空地中继网络优化的无人机运动控制方法[J]. 系统工程与电子技术, 2024, 46(5): 1712-1723. |
| [8] | 刘玉杰, 崔凯凯, 韩维, 李樾. 基于IPSO的舰载机出动离场规划研究[J]. 系统工程与电子技术, 2024, 46(4): 1337-1345. |
| [9] | 杨平, 肖兵, 陈新, 唐璐琪. 多约束条件下战斗机三维路径规划问题[J]. 系统工程与电子技术, 2024, 46(12): 4213-4221. |
| [10] | 莫昱, 唐旭东. 基于改进自抗扰控制的电动伺服系统机械谐振抑制方法[J]. 系统工程与电子技术, 2024, 46(1): 309-317. |
| [11] | 崔正达, 魏明英, 李运迁. 基于速度预测的防空导弹中制导末段协同弹道规划方法[J]. 系统工程与电子技术, 2023, 45(9): 2912-2921. |
| [12] | 曾颖, 李彦锋, 王弘毅, 钱华明, 黄洪钟. 联合MRGP和PSO的工业机器人驱动器可靠性分析[J]. 系统工程与电子技术, 2023, 45(8): 2643-2650. |
| [13] | 吴立尧, 苏析超, 王垒, 潘子双. 有人/无人机编队队形集结控制研究[J]. 系统工程与电子技术, 2023, 45(7): 2192-2202. |
| [14] | 张雷雷, 刘曦, 刘旭琳, 杨鸿均, 张峰. 无失效数据下弹上机电产品加速贮存寿命评估方法[J]. 系统工程与电子技术, 2023, 45(7): 2287-2294. |
| [15] | 王哲昊, 简涛, 黄晓冬, 王海鹏, 刘瑜. 基于角域特征PSO的海面目标HRRP识别方法[J]. 系统工程与电子技术, 2023, 45(6): 1642-1650. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||