
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (4): 1222-1234.doi: 10.12305/j.issn.1001-506X.2025.04.19
耿泽, 黄炎焱, 张寒
收稿日期:2024-04-16
出版日期:2025-04-25
发布日期:2025-05-28
通讯作者:
黄炎焱
作者简介:耿泽(1998—), 男, 博士研究生, 主要研究方向为仿真建模与评估决策基金资助:Ze GENG, Yanyan HUANG, Han ZHANG
Received:2024-04-16
Online:2025-04-25
Published:2025-05-28
Contact:
Yanyan HUANG
摘要:
现代炮兵具有机动作战、快打快撤的特点, 依据炮位侦察雷达的定位对其反击难以直接命中。为此, 提出一种基于火炮转移路径预测的无人机集群反炮兵搜索路径规划方法, 通过预测火炮射击后的转移路径, 提高无人机集群对其发现与打击的效能。建立战场环境与作战要素模型, 提出作战状态与地貌环境适宜度概念。通过炮兵作战Markov状态模型, 结合作战状态与地貌环境适宜度进行火炮转移路径预测。同时, 基于滚动时域优化构建无人机集群搜索路径规划算法, 通过目标函数中新设计的预期收益项, 解决稀疏信息素分布下的搜索路径寻优问题。仿真结果表明, 所提方法能够有效利用战场信息, 预测蓝方炮兵可能的转移路径。相较于对比方法, 所提方法在搜索与打击任务中的效能与稳定性均具有一定优势, 为后续的实际应用提供基础。
中图分类号:
耿泽, 黄炎焱, 张寒. 基于火炮转移路径预测的无人机集群反炮兵搜索路径规划[J]. 系统工程与电子技术, 2025, 47(4): 1222-1234.
Ze GENG, Yanyan HUANG, Han ZHANG. UAV swarm anti-artillery search path planning based on artillery transfer path prediction[J]. Systems Engineering and Electronics, 2025, 47(4): 1222-1234.
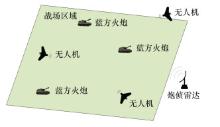
图1
无人机集群反炮兵作战示意图"
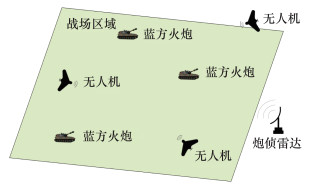
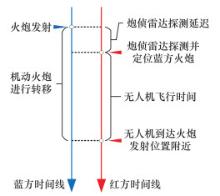
图2
作战行动时间线"
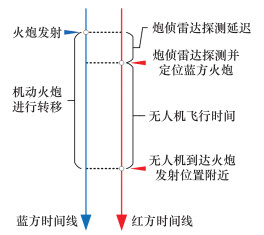
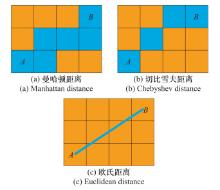
图3
不同栅格距离定义"
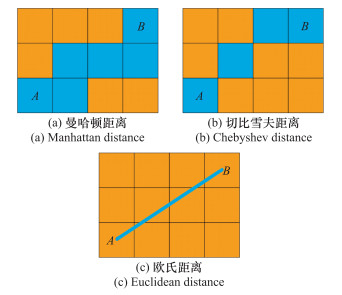
表1
适宜程度与适宜度值"
| 适宜程度 | 适宜度f取值 | 描述 |
| 优 | 4 | 该项作战活动在该地貌环境下进行时取得最大效能 |
| 良 | 3 | 该项作战活动能够顺利在该地貌环境下进行, 效能良好 |
| 中等 | 2 | 该项作战活动能够在该地貌环境下进行, 效能一般 |
| 较差 | 1 | 该项作战活动在该地貌环境下进行时存在困难, 效能低下 |
| 差 | 0 | 该项作战活动无法在该地貌环境下进行 |
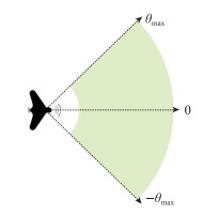
图4
无人机可能的飞行轨迹范围"
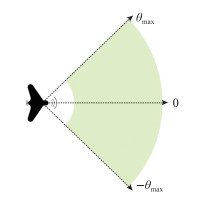
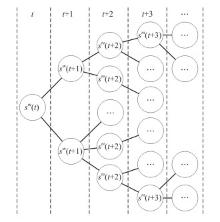
图5
递推得到状态转移序列"
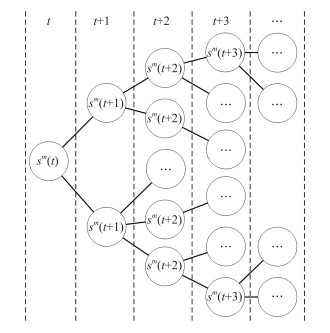
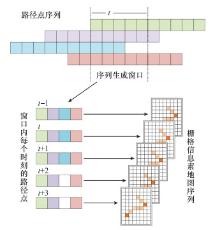
图6
栅格信息素地图序列生成示意图"
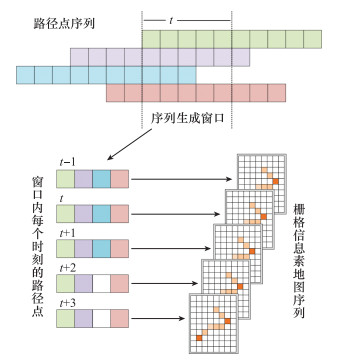
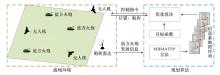
图7
无人机集群搜索路径规划算法结构"
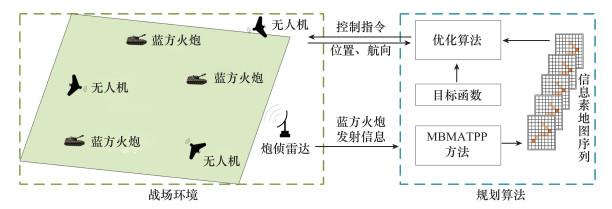
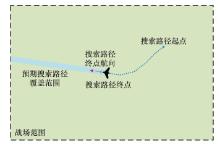
图8
预期搜索范围示意图"
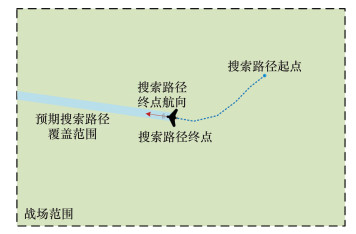
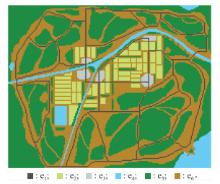
图9
任务区域"
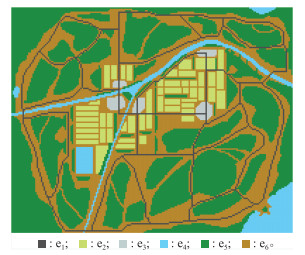
表2
战场环境与作战要素参数"
| 参数 | 取值 | 参数 | 取值 | |
| a | 200 | δ | 0.5 | |
| b | 160 | Tr/Δt | 1 | |
| l/m | 50 | vu/(l·Δt-1) | 4 | |
| Δt/s | 30 | θmax/(°) | 45 | |
| αc | 1.33 | r/l | 1.5 | |
| $\epsilon$ | 0.8 | - | - |
表3
PSO算法参数"
| 参数 | 取值 | 参数 | 取值 | |
| 输入维度 | 5 | w | 0.8 | |
| 种群数量 | 20 | c1 | 0.5 | |
| 最大迭代次数 | 200 | c2 | 0.5 |
表4
路径规划算法参数"
| 参数 | 取值 | 参数 | 取值 | |
| α1 | 3 | ω3 | 1 | |
| β1 | 8.7 | dset/l | 15 | |
| α2 | 2.7 | Tp/Δt | 1 | |
| β2 | 2.2 | Tf/Δt | 5 | |
| p12 | 1 | σ1 | 1.8 | |
| p21 | 1 | σ2 | 1 | |
| d | 14 | σ3 | -30 | |
| ω1 | 1.5 | dp | 5 | |
| ω2 | 10 | - | - |
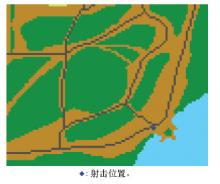
图10
射击位置"
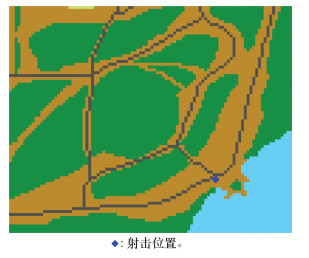
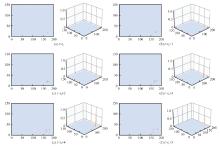
图11
MBMATPP方法栅格信息素地图序列"
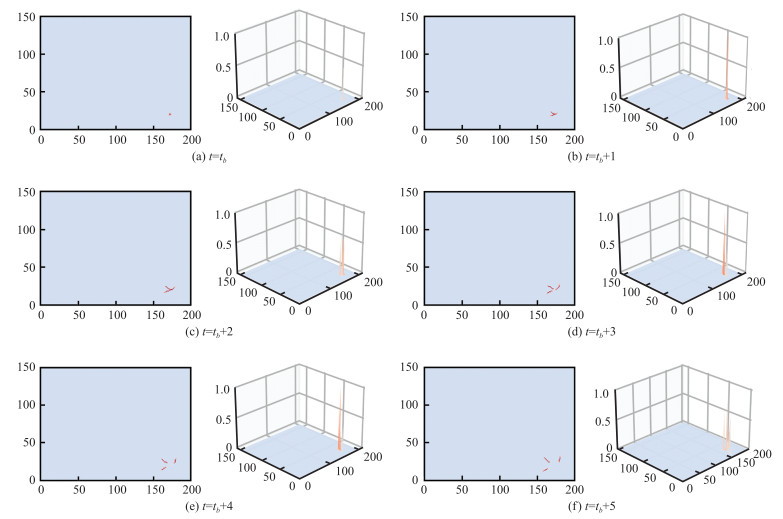

图12
M-RM-DCSD方法获得的栅格信息素地图"
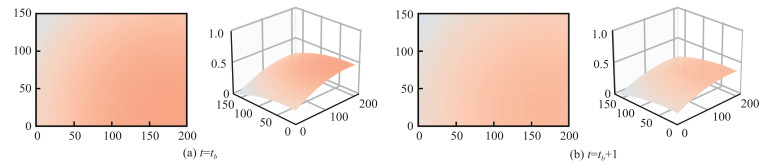
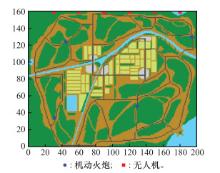
图13
机动火炮与无人机初始位置"
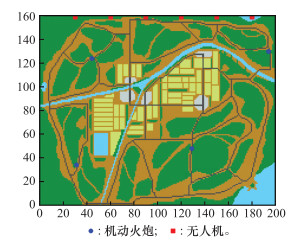
表5
机动火炮与无人机初始位置"
| 编号 | 位置坐标 | 航向/(°) |
| 自行火炮1 | (44, 124) | - |
| 自行火炮2 | (31, 34) | - |
| 自行火炮3 | (194, 130) | - |
| 自行火炮4 | (129, 48) | - |
| 无人机1 | (40, 160) | -90 |
| 无人机2 | (80, 160) | -90 |
| 无人机3 | (120, 160) | -90 |
| 无人机4 | (160, 160) | -90 |
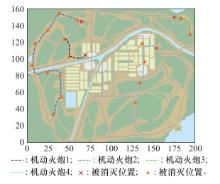
图14
机动火炮转移路径"
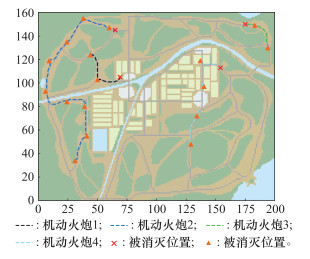
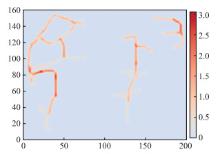
图15
存在性信息素累计分布"
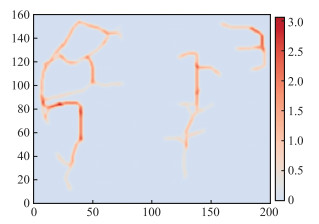
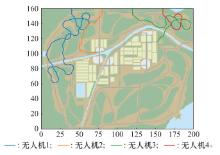
图16
无人机搜索路径"
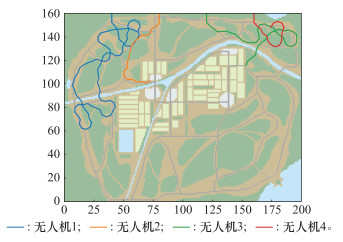
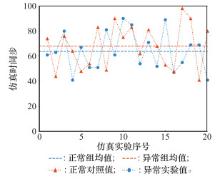
图17
异常情况实验仿真时间结果"
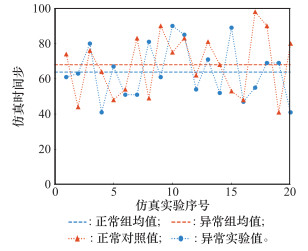
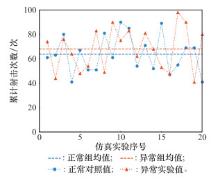
图18
异常情况实验射击次数结果"
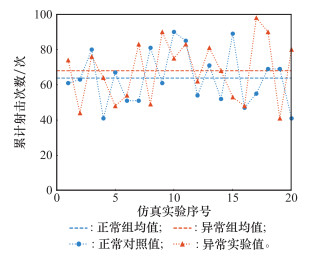
表6
异常情况实验结果"
| 实验结果 | 对照组 | 实验组 |
| 仿真时间步均值 | 63.90 | 68.05 |
| 仿真时间步标准差 | 14.87 | 16.91 |
| 累计射击次数均值 | 36.85 | 38.95 |
| 累计射击次数标准差 | 5.90 | 7.85 |
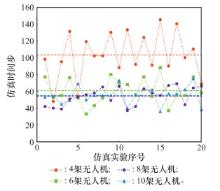
图19
摧毁所有机动火炮所需仿真时间步"
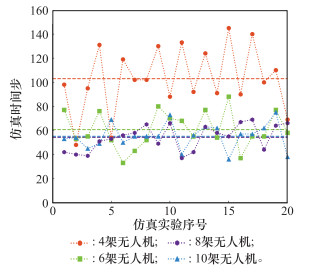
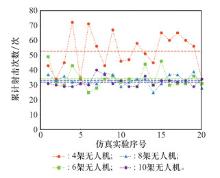
图20
火炮累计射击次数"
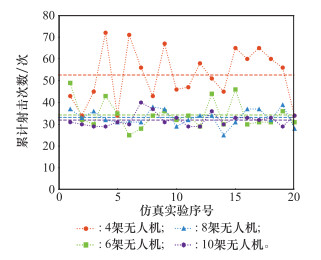
表7
不同无人机数量结果"
| 实验结果 | 集群中无人机数量 | |||
| 4 | 6 | 8 | 10 | |
| 仿真时间步均值 | 103.05 | 60.75 | 55.20 | 54.20 |
| 仿真时间步标准差 | 26.11 | 14.70 | 10.32 | 10.38 |
| 累计射击次数均值 | 52.60 | 34.30 | 33.20 | 31.95 |
| 累计射击次数标准差 | 11.85 | 6.25 | 3.60 | 2.94 |
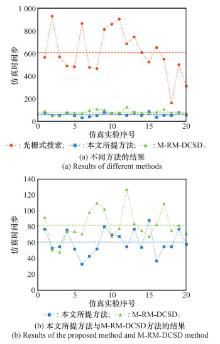
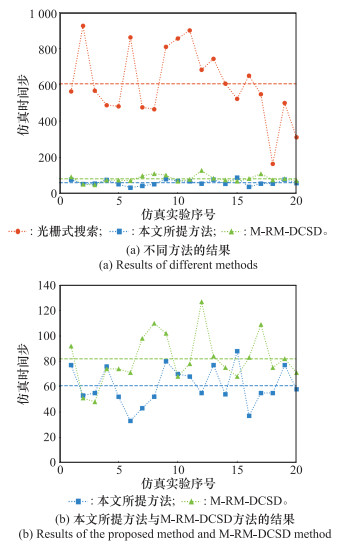
图21
不同方法对比"
| 1 |
MOHAMMAD S , HIMANSHU M , SHREYA P , et al. Routing and scheduling optimization for UAV assisted delivery system: a hybrid approach[J]. Applied Soft Computing, 2022, 126, 109225.
doi: 10.1016/j.asoc.2022.109225 |
| 2 |
WANG G H , WANG F M , WANG J H , et al. Collaborative target assignment problem for large-scale UAV swarm based on two-stage greedy auction algorithm[J]. Aerospace Science and Technology, 2024, 149, 109146.
doi: 10.1016/j.ast.2024.109146 |
| 3 |
LAGHARI A A , JUMANI A K , LAGHARI R A , et al. Unmanned aerial vehicles: a review[J]. Cognitive Robotics, 2023, 3, 8- 22.
doi: 10.1016/j.cogr.2022.12.004 |
| 4 |
SHAO R , TAO R T , LIU Y D , et al. UAV cooperative search in dynamic environment based on hybrid-layered APF[J]. EURASIP Journal on Advances in Signal Processing, 2021, 2021 (1): 101.
doi: 10.1186/s13634-021-00807-6 |
| 5 |
HU J Q , WU H S , ZHAN R J , et al. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior[J]. Journal of Systems Engineering and Electro-nics, 2021, 32 (6): 1463- 1476.
doi: 10.23919/JSEE.2021.000124 |
| 6 |
ZHANG C Q , ZHOU W J , QIN W D , et al. A novel UAV path planning approach: heuristic crossing search and rescue optimization algorithm[J]. Expert Systems with Applications, 2023, 215, 119243.
doi: 10.1016/j.eswa.2022.119243 |
| 7 |
WANG Z Q , LI J , LI J , et al. A decentralized decision-making algorithm of UAV swarm with information fusion strategy[J]. Expert Systems with Applications, 2024, 237, 121444.
doi: 10.1016/j.eswa.2023.121444 |
| 8 |
LI Y B , ZHANG Z T , SUN Q , et al. A distributed framework for multiple UAV cooperative target search under dynamic environment[J]. Journal of the Franklin Institute, 2024, 361 (8): 106810.
doi: 10.1016/j.jfranklin.2024.106810 |
| 9 |
ALFEO A L , CIMINO M G C A , DE F N , et al. Design and simulation of the emergent behavior of small drones swarming for distributed target localization[J]. Journal of Computational Science, 2018, 29, 19- 33.
doi: 10.1016/j.jocs.2018.09.014 |
| 10 | SHAO Y , ZHAO Z F , LI R P , et al. Target detection for multi-UAVs via digital pheromones and navigation algorithm in unknown environments[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21 (5): 796- 808. |
| 11 | RYAN D , JOHN S . A framework for multi-UAV persistent search and retrieval with stochastic target appearance in a continuous space[J]. Journal of Intelligent & Robotic Systems, 2021, 103 (4): 65. |
| 12 |
DANILO S , LEONARDO C , LORENZO F . Multitrajectory model predictive control for safe UAV navigation in an unknown environment[J]. IEEE Trans.on Control Systems Technology, 2023, 31 (5): 1982- 1997.
doi: 10.1109/TCST.2022.3216989 |
| 13 |
YAO P , WEI X . Multi-UAV information fusion and cooperative trajectory optimization in target search[J]. IEEE Systems Journal, 2022, 16 (3): 4325- 4333.
doi: 10.1109/JSYST.2021.3117959 |
| 14 | LI Y B, ZHANG S T, CHEN J, et al. Multi-UAV cooperative mission assignment algorithm based on ACO method[C]//Proc. of the IEEE International Conference on Computing, Networking and Communications, 2020: 304-308. |
| 15 | 文超, 董文瀚, 解武杰, 等. 基于回访机制的无人机集群分布式协同区域搜索方法[J]. 航空学报, 2023, 44 (11): 253- 270. |
| WEN C , DONG W H , XIE W J , et al. Distributed cooperative area search method for UAV swarms based on revisit mechanism[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (11): 253- 270. | |
| 16 |
XU C , XU M , YIN C J . Optimized multi-UAV cooperative path planning under the complex confrontation environment[J]. Computer Communications, 2020, 162, 196- 203.
doi: 10.1016/j.comcom.2020.04.050 |
| 17 | TAREK M, ABOSREA M, ELNAGAR A R, et al. Design and implementation of a cymbeline radar signal processor with waveform generator to detect small RCS artillery bombs on a single FPGA chip[C]//Proc. of the International Undergraduate Research Conference, 2021, 5(5): 277-280. |
| 18 | SWIETOCHOWSKI N . Rules of artillery employment in combat operations[J]. Scientific Journal of the Military University of Land Forces, 2019, 51 (2): 280- 293. |
| 19 | 陈雅茜, 高亦远, 葛荣存, 等. 一种提高栅格成本距离分析准确性的改进算法[J]. 地理与地理信息科学, 2020, 36 (3): 18- 24. |
| CHEN Y X , GAO Y Y , GE R C , et al. An improved algorithm for increasing the accuracy of raster cost distance analysis[J]. Geography and Geo-Information Science, 2020, 36 (3): 18- 24. | |
| 20 | JING X R, YANG X J. Application and improvement of heuristic function in A* algorithm[C]//Proc. of the IEEE 37th Chinese Control Conference, 2018: 2191-2194. |
| 21 | ZHANG P Q, HUA Y H, LI T. Dynamic trajectory planning and tracking algorithm of lunar rover with updating map information[C]//Proc. of the IEEE China Automation Congress, 2022: 4024-4029. |
| 22 | WANG H W , QI X Y , LOU S J , et al. An efficient and robust improved A* algorithm for path planning[J]. Symmetry, 2021, 13 (11): 2213. |
| 23 | 孟光磊, 李树发, 刘彬斌, 等. 防空预警雷达高原环境适应性评估的自学习模糊灰度方法[J]. 兵工学报, 2022, 43 (1): 98- 110. |
| MENG G L , LI S F , LIU B B , et al. Self-learning fuzzy grey method for plateau environmental adaptability assessment of air defense early-warning radar[J]. Acta Armamentarii, 2022, 43 (1): 98- 110. | |
| 24 | SHAO Y , ZHAO Z F , LI R P , et al. Target detection for multi-UAVs via digital pheromones and navigation algorithm in unknown environments[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21 (5): 796- 808. |
| 25 | FEI B W , BAO W D , ZHU X M , et al. Autonomous cooperative search model for multi-UAV with limited communication network[J]. IEEE Internet of Things Journal, 2022, 9 (19): 19346- 19361. |
| 26 | 谢黎焱. 基于马尔柯夫过程的自行炮兵机动作战研究[J]. 指挥控制与仿真, 2010, 32 (4): 16-20, 27. |
| XIE L Y . Research on maneuvering combat of self-propelled cannon based on Markov[J]. Command Control & Simulation, 2010, 32 (4): 16-20, 27. | |
| 27 | 方兆本, 缪柏其. 随机过程[M]. 北京: 科学出版社, 2011. |
| FANG Z B , MIAO B Q . Stochastic process[M]. Beijing: China Science Publishing, 2011. | |
| 28 | SCHWENZER M , AY M , BERGS T , et al. Review on model predictive control: an engineering perspective[J]. The International Journal of Advanced Manufacturing Technology, 2021, 117, 1327- 1349. |
| 29 | ALANEZI M A , BOUCHEKARA H R E H , APALARA T A , et al. Dynamic target search using multi-UAVs based on motion-encoded genetic algorithm with multiple parents[J]. IEEE Access, 2022, 10, 77922- 77939. |
| 30 | LI B , SONG C , BAI S X , et al. Multi-UAV trajectory planning during cooperative tracking based on a fusion algorithm integrating MPC and standoff[J]. Drones, 2023, 7 (3): 196. |
| 31 | WANG Z J , ZHAN Z H , KWONG S , et al. Adaptive granula-rity learning distributed particle swarm optimization for large-scale optimization[J]. IEEE Trans.on Cybernetics, 2020, 51 (3): 1175- 1188. |
| [1] | 毕文豪, 张梦琦, 高飞, 杨咪, 张安. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| [2] | 刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇. 考虑韧性的无人机集群自组织区域覆盖方法[J]. 系统工程与电子技术, 2024, 46(3): 942-952. |
| [3] | 高程, 都延丽, 步雨浓, 刘燕斌, 王宇飞. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46(3): 972-981. |
| [4] | 殷雅萱, 张安, 毕文豪, 杨盼, 黄湛钧. 动态拓扑下四旋翼无人机集群蜂拥控制[J]. 系统工程与电子技术, 2024, 46(10): 3473-3483. |
| [5] | 刘兴宇, 蒋志彪, 蒋天瑞, 郭荣化, 常远, 闫超, 周晗. 基于通信功率自适应的无人机集群协同导航控制方法[J]. 系统工程与电子技术, 2024, 46(10): 3536-3546. |
| [6] | 薛锡瑞, 黄树彩, 韦道知, 吴建峰. 基于EMD-DESN的无人机集群航迹目的地预测[J]. 系统工程与电子技术, 2024, 46(1): 290-299. |
| [7] | 齐小刚, 周雨桐, 刘立芳. 无人机集群对地作战任务可靠性评估[J]. 系统工程与电子技术, 2023, 45(9): 2971-2978. |
| [8] | 张书衡, 翟茹萍, 刘永凯. 基于通信域和雷达域融合特征的无人机集群类型识别算法[J]. 系统工程与电子技术, 2023, 45(12): 3734-3742. |
| [9] | 罗瑞宁, 黄树彩, 赵岩, 张振. 子母导弹反无人机集群制导策略[J]. 系统工程与电子技术, 2023, 45(10): 3249-3258. |
| [10] | 翟茹萍, 张书衡, 平嘉蓉. 复杂多径环境下的无人机集群通信波形识别[J]. 系统工程与电子技术, 2023, 45(10): 3312-3320. |
| [11] | 谷旭平, 唐大全. 基于联邦滤波算法的无人机集群分层协同导航[J]. 系统工程与电子技术, 2022, 44(3): 967-976. |
| [12] | 杨兴家, 段克清, 李想, 祁炜. 无人机集群协同探测距离解模糊方法[J]. 系统工程与电子技术, 2022, 44(2): 480-489. |
| [13] | 符小卫, 潘静. 无人机集群规避动态障碍物的分布式队形控制[J]. 系统工程与电子技术, 2022, 44(2): 529-537. |
| [14] | 管灵, 朱晨曦, 董纯柱, 殷红成. 基于模式/区域分解的无人机集群电磁特性快速分析[J]. 系统工程与电子技术, 2021, 43(10): 2697-2705. |
| [15] | 贾高伟, 王建峰. 无人机集群任务规划方法研究综述[J]. 系统工程与电子技术, 2021, 43(1): 99-111. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||