
系统工程与电子技术 ›› 2026, Vol. 48 ›› Issue (2): 515-523.doi: 10.12305/j.issn.1001-506X.2026.02.13
• 系统工程 • 上一篇
杨鹏程1( ), 杨清清1, 高盈盈1,*, 杨志伟1, 杨克巍1, 艾波2
), 杨清清1, 高盈盈1,*, 杨志伟1, 杨克巍1, 艾波2
收稿日期:2023-09-28
修回日期:2024-03-06
出版日期:2024-06-14
发布日期:2024-06-14
通讯作者:
高盈盈
E-mail:15206889290@163.com
作者简介:杨鹏程(2001—),男,硕士研究生,主要研究方向为应急管理与智能决策基金资助:
Pengcheng YANG1(), Qingqing YANG1, Yingying GAO1,*, Zhiwei YANG1, Kewei YANG1, Bo AI2
Received:2023-09-28
Revised:2024-03-06
Online:2024-06-14
Published:2024-06-14
Contact:
Yingying GAO
E-mail:15206889290@163.com
摘要:
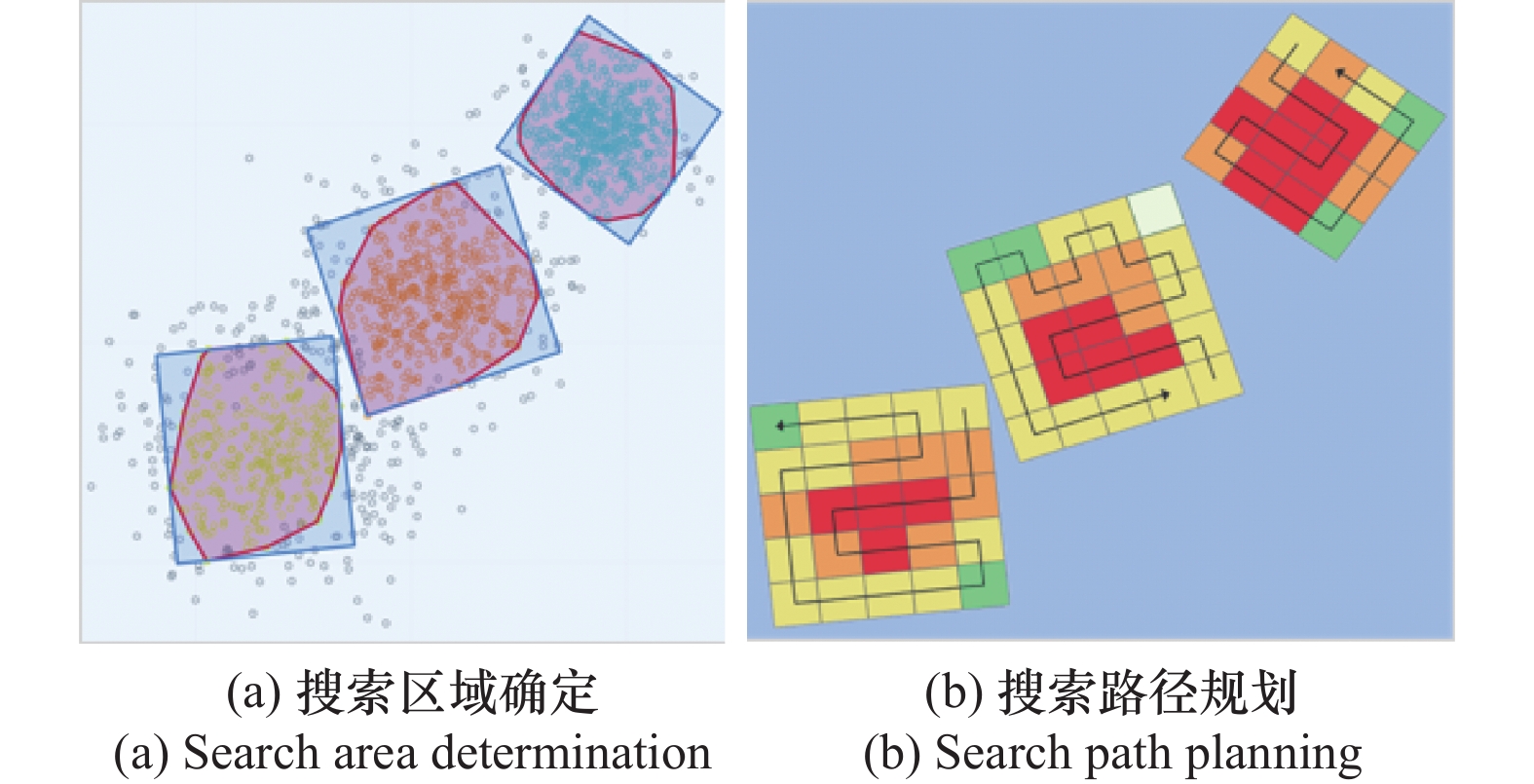
海上移动目标搜索是海上搜救行动的重要环节,搜索效率直接影响搜救行动的成功率。针对海上移动目标搜索路径规划问题进行了以下三部分工作。首先,提出基于最小覆盖矩形的搜索区域确定算法,以划分最佳搜索区域;其次,构建基于强化学习的搜索路径规划算法,综合考虑多重约束条件,实现了子区域的最佳搜索路径规划;最后,研发决策支持系统,验证了算法的有效性和鲁棒性,并扩展到多搜索单元合作的场景。研究结果表明,所提算法在不同搜索场景下均有良好的求解效果,对提高海上搜救行动的成功率具有重要的理论意义和应用价值。
中图分类号:
杨鹏程, 杨清清, 高盈盈, 杨志伟, 杨克巍, 艾波. 基于强化学习的海上移动目标搜索路径规划[J]. 系统工程与电子技术, 2026, 48(2): 515-523.
Pengcheng YANG, Qingqing YANG, Yingying GAO, Zhiwei YANG, Kewei YANG, Bo AI. Path planning for maritime moving targets search based on reinforcement learning[J]. Systems Engineering and Electronics, 2026, 48(2): 515-523.
表1
天气修正系数"
| 天气 | 搜索目标 | |
| 人员 | 救生筏 | |
| 无风 | 1.0 | 1.0 |
| 风速大于28 km/h或 浪高大于1 m | 0.5 | 0.9 |
| 风速大于46 km/h或 浪高大于1.5 m | 0.25 | 0.6 |
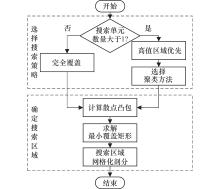
图1
搜索区域确定算法流程"
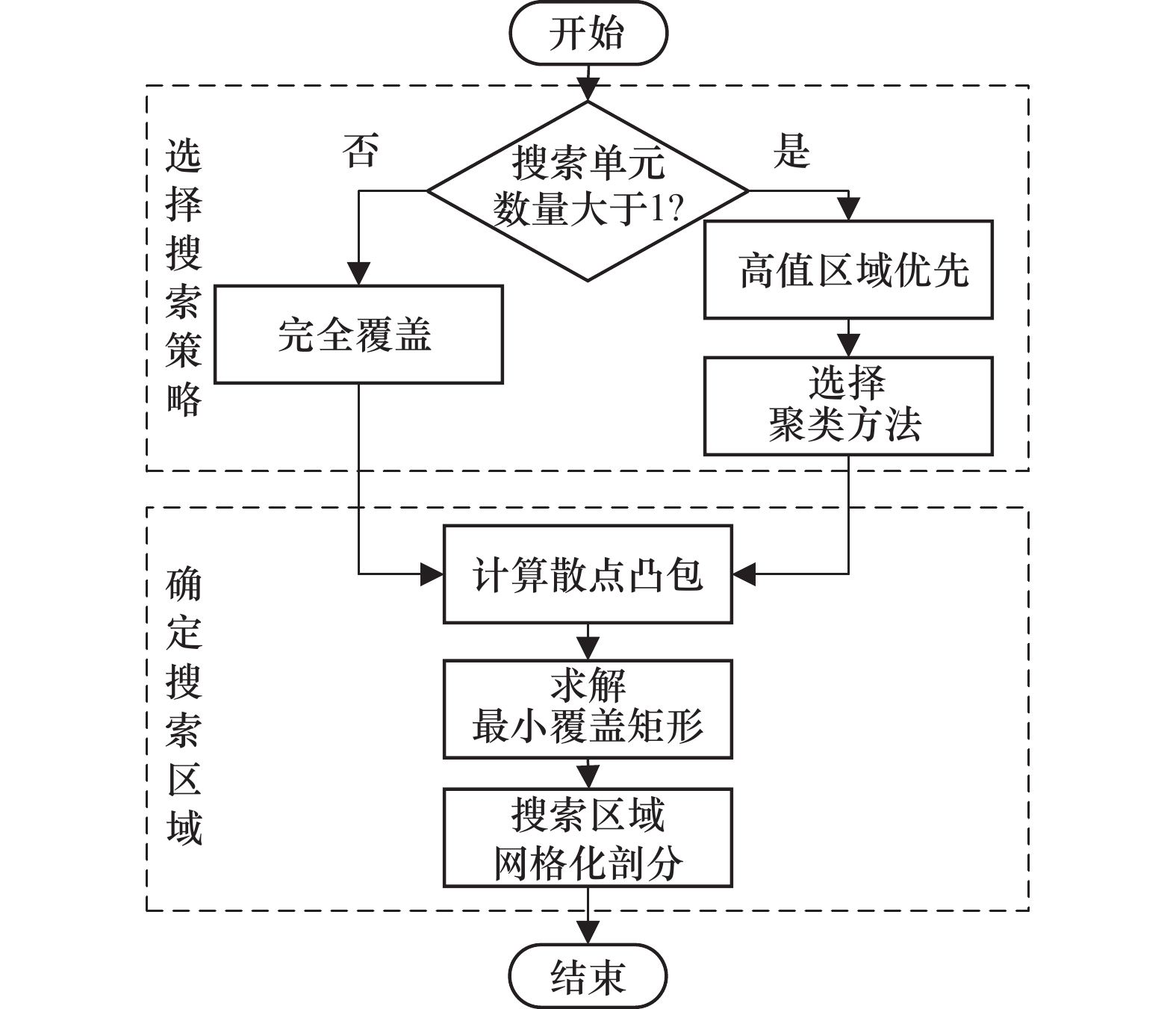
表2
两种聚类算法适用场景对比"
| 对比内容 | K-Means | DBSCAN |
| 搜索单元数量 | 有限 | 充足 |
| 散点分布情况 | 均匀分布 | 集中分布 |
| 适用场景 | 已知搜索单元的数量,需 进一步分配子区域 | 可根据聚类效果确定参加任务的搜索单元的数量 |
| 优势 | 可囊括全部散点 | 可去除部分噪声 |

图2
确定搜索区域流程"
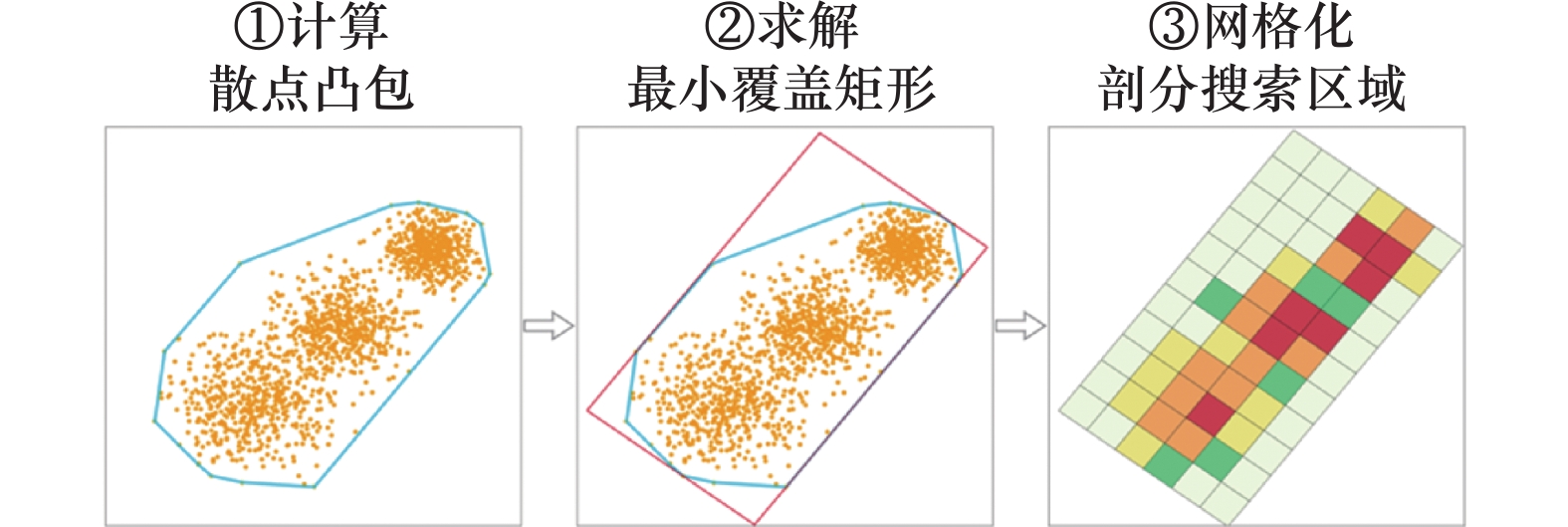
图3
搜索路径规划算法流程"


图4
状态空间融合过程"
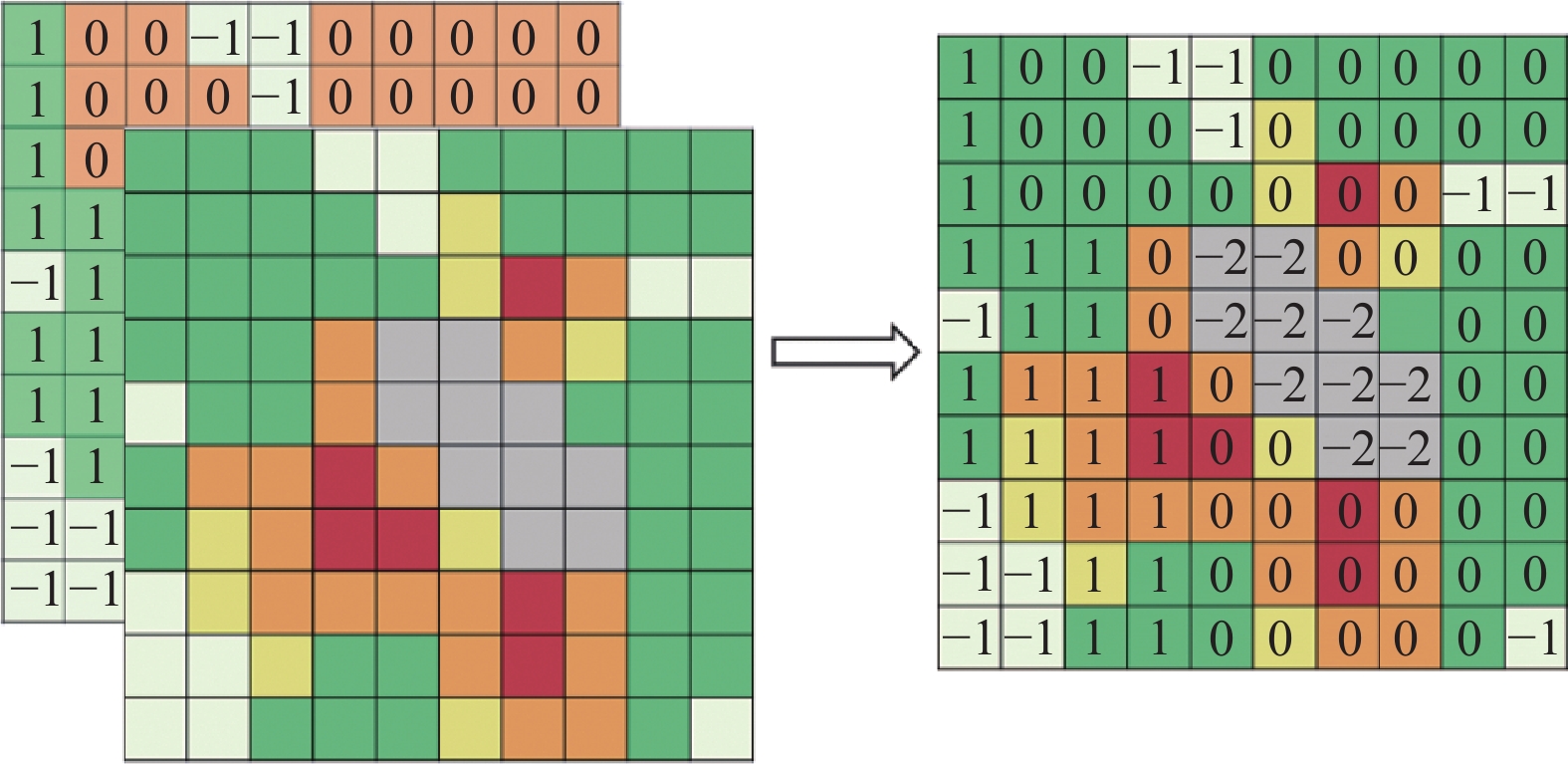
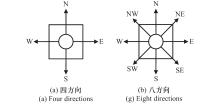
图5
动作空间"
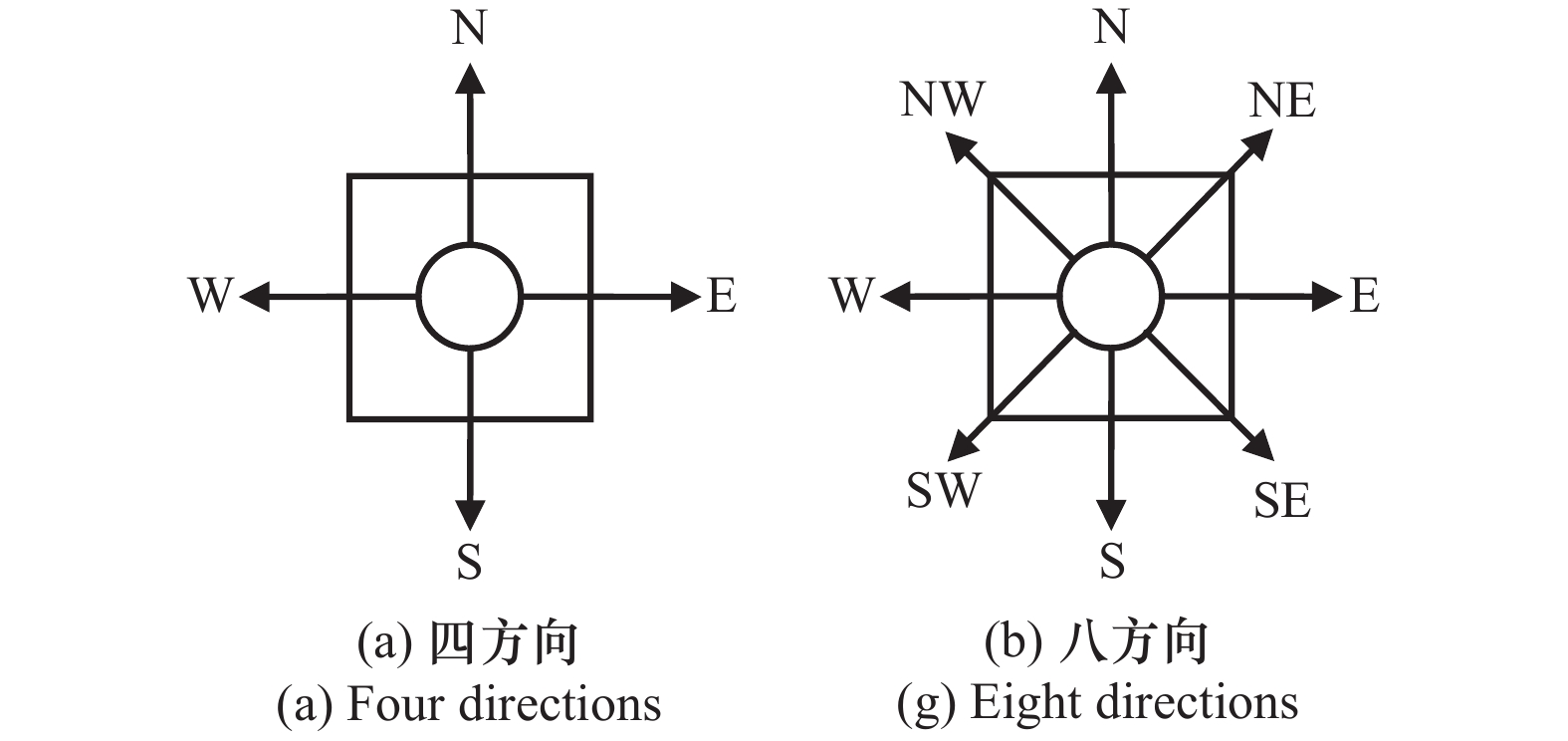
图6
3种概率分布"
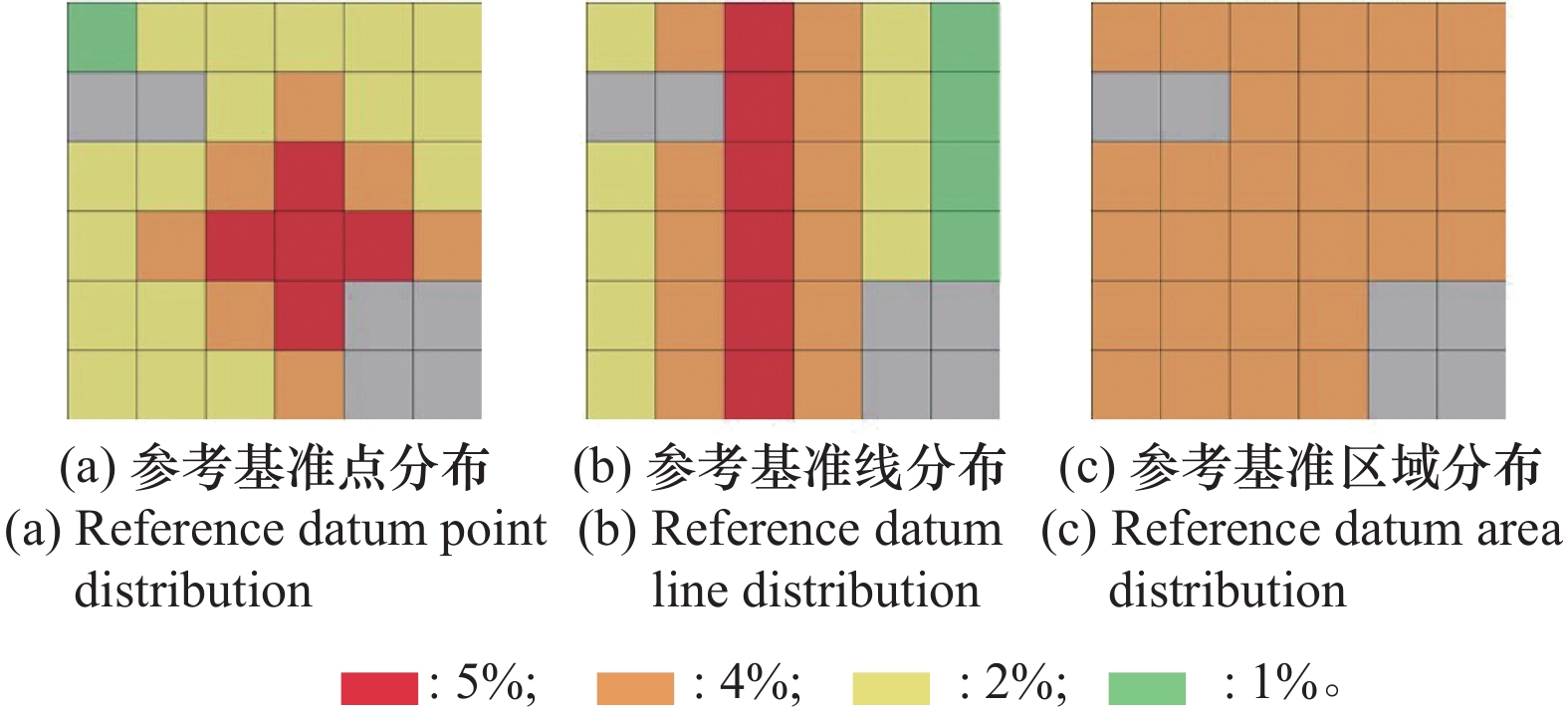

图7
两种目标的渐进式学习过程"
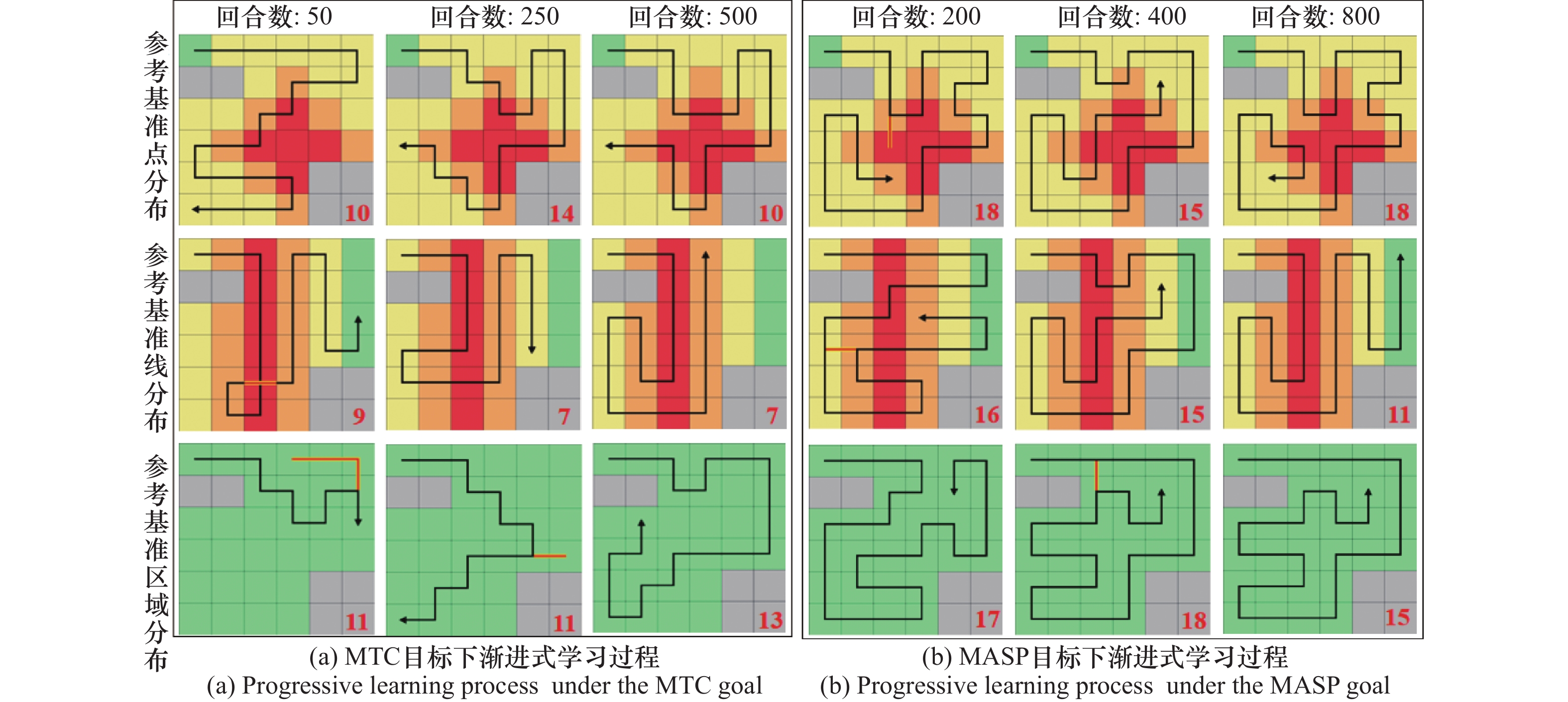
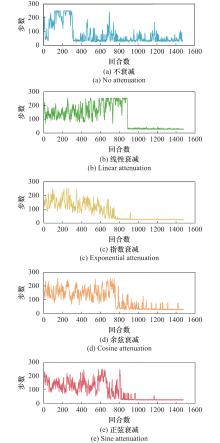
图8
不同衰减策略下的步数收敛曲线"
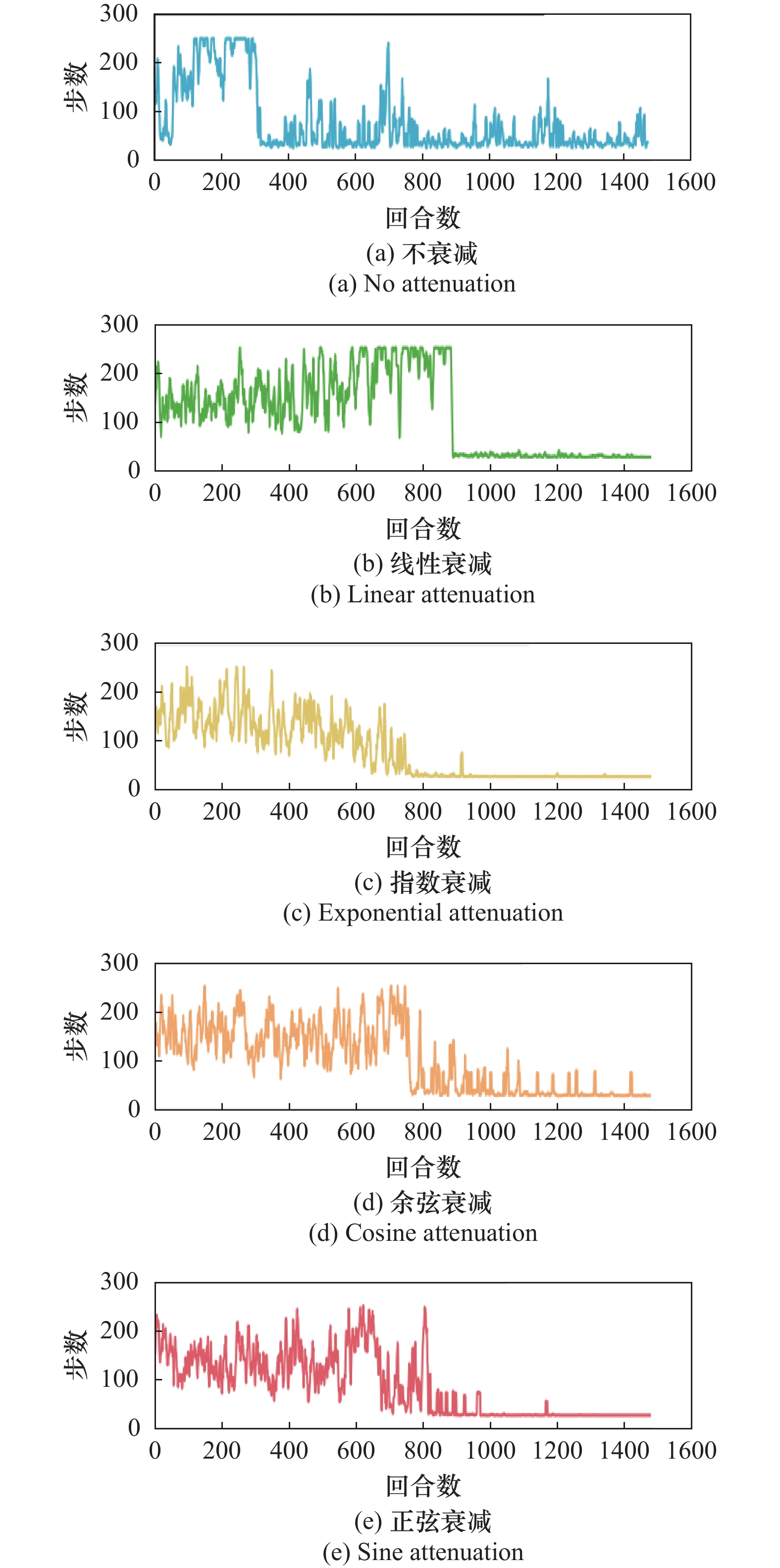
图9
不同衰减策略下的$ {\mathrm{POS}}_{{\text{cum}}} $增长曲线"
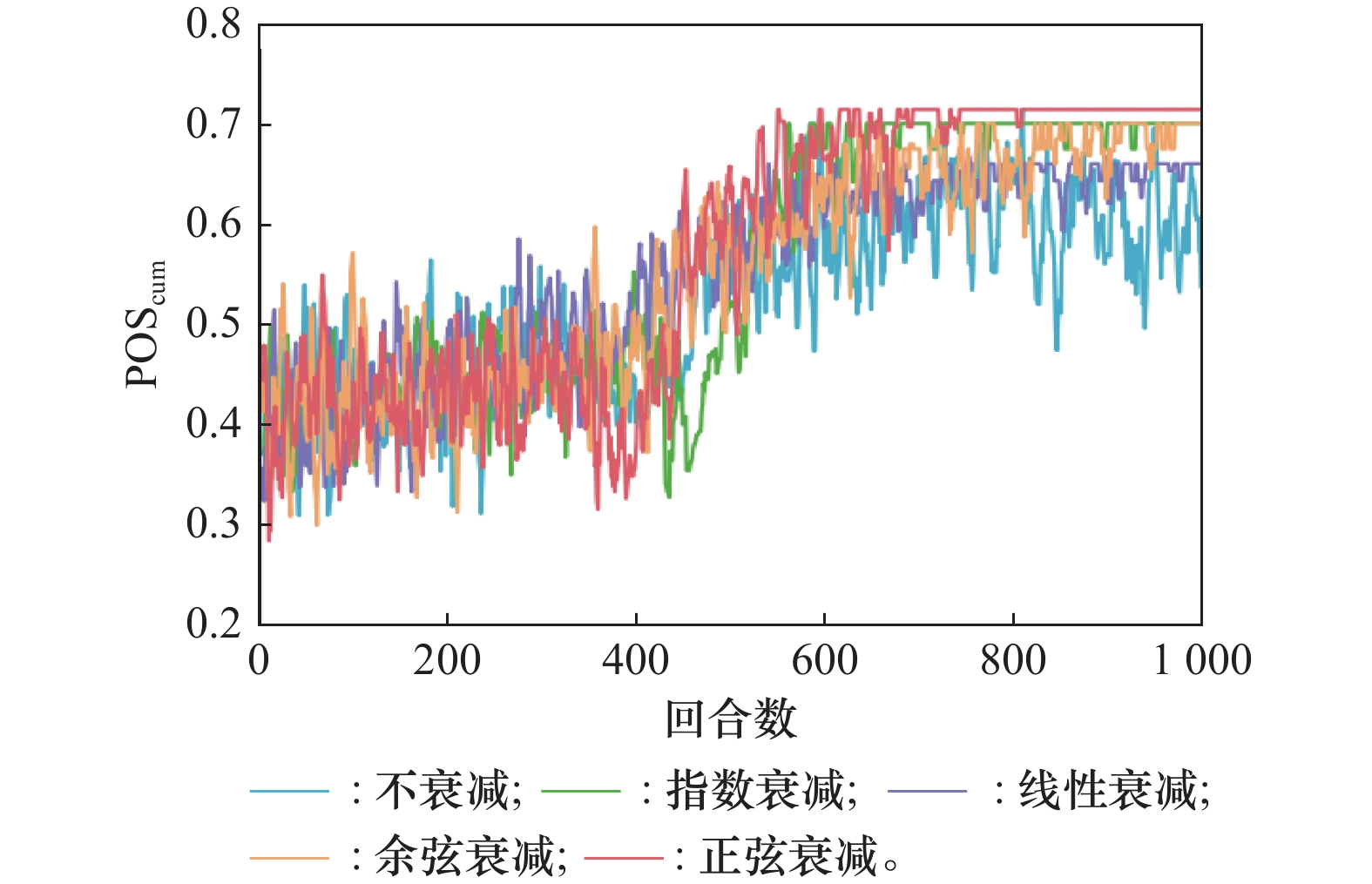
图10
不同算法路径规划结果"
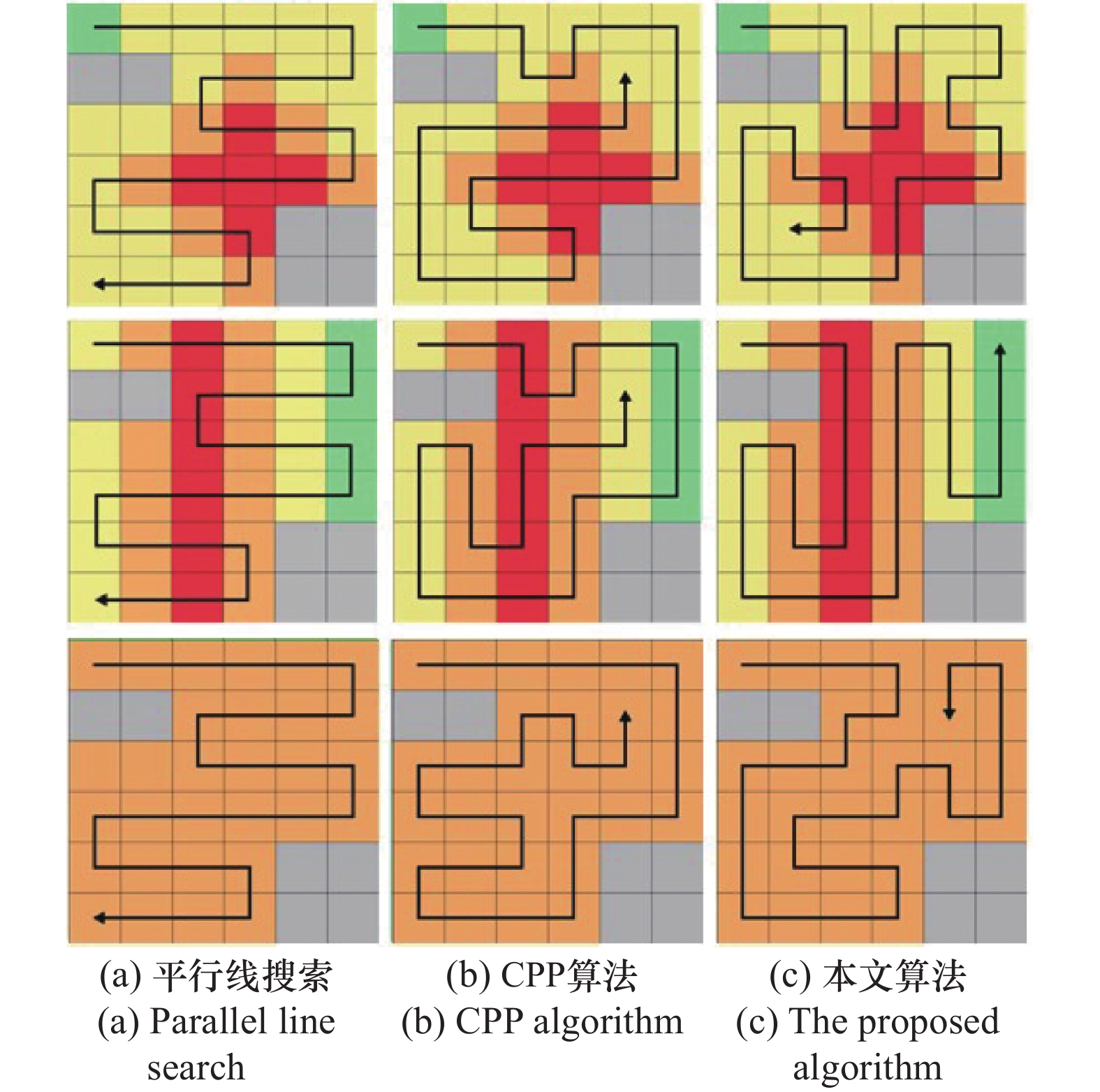

图11
不同算法增长曲线"
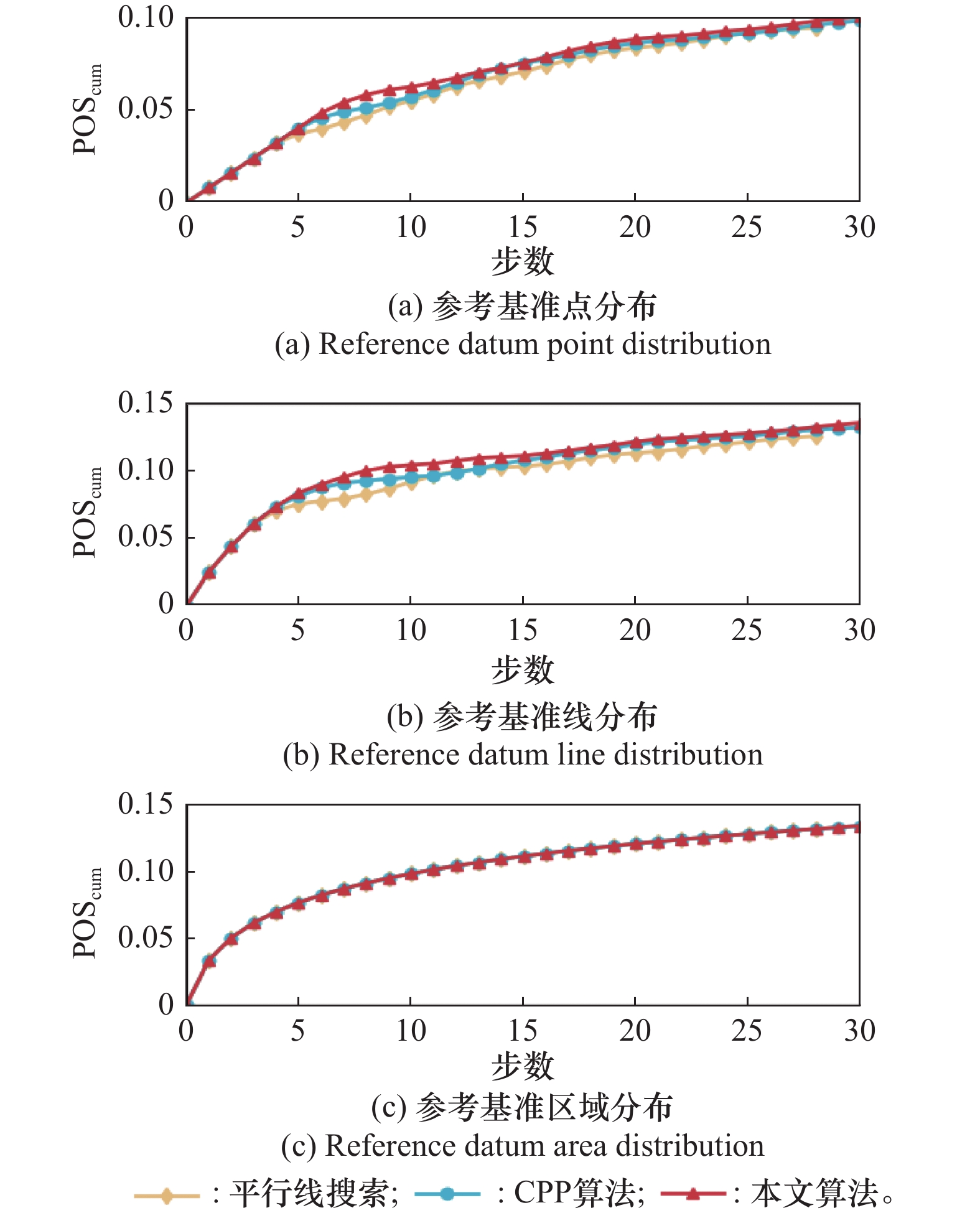
图12
不同算法收敛曲线"
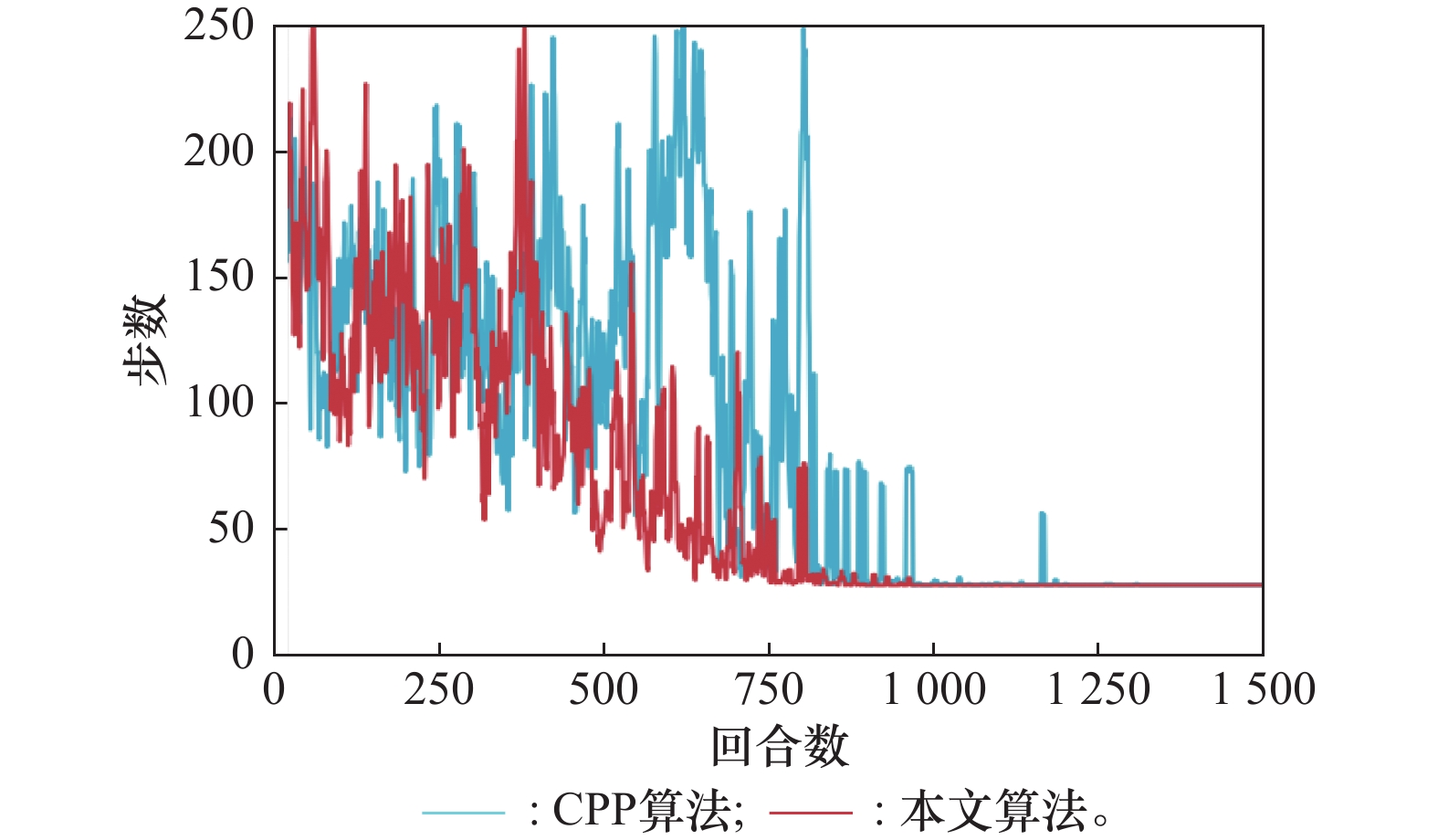
图13
系统主界面"
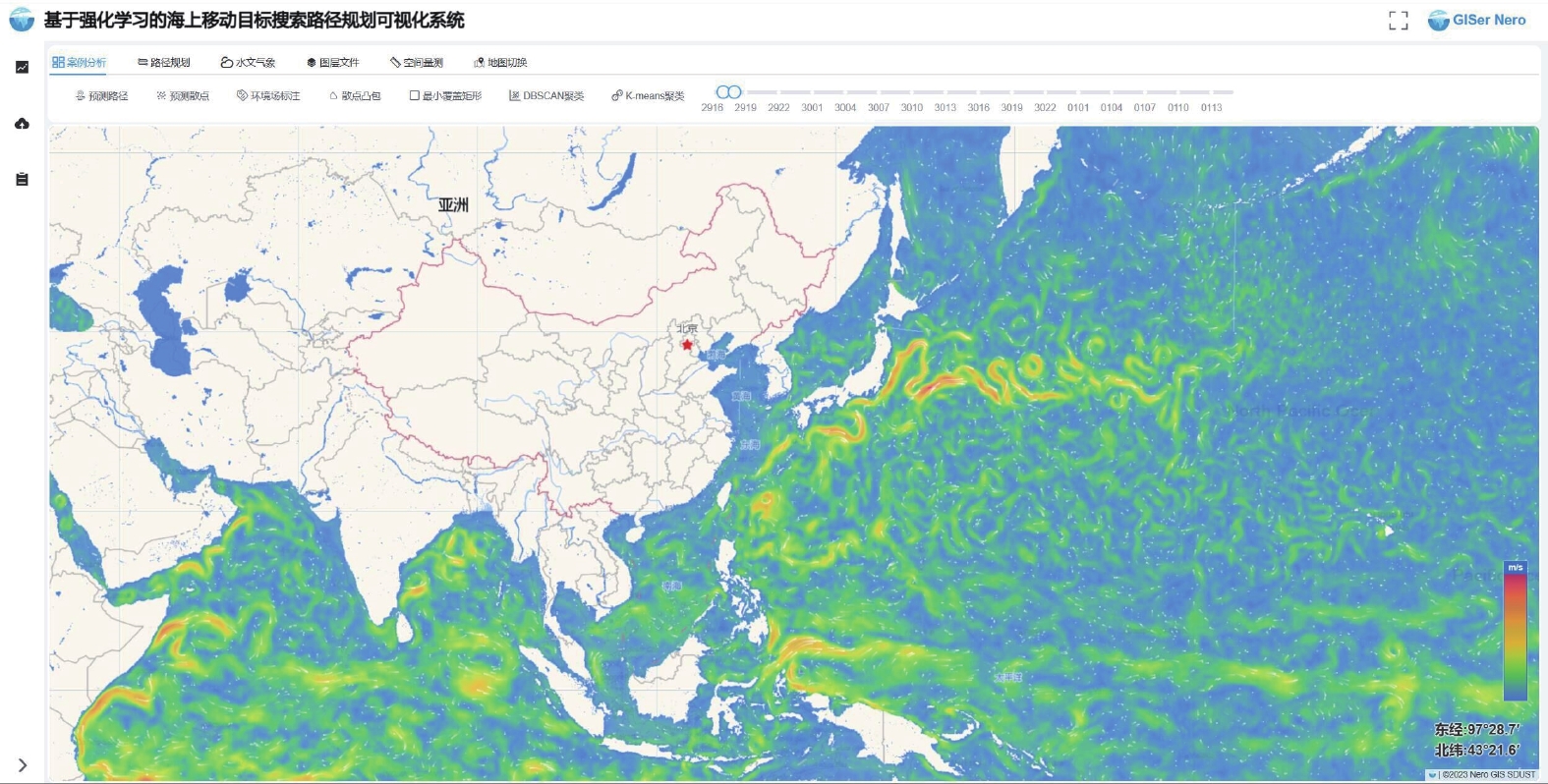
表3
各案例详细信息"
| 参数 | A | B | C |
| 预测时间 | |||
| 预测时长/h | 12 | 12 | 48 |
| 预测起始坐标 | 114˚46'E 21˚00'N | 114˚24'E 21˚08'N | 116˚02'E 21˚17'N |
| 搜索时段 | 9~10 | 3~5 | 2~4 |
| 风场参数 | 0.02 | 0.02 | 0.02 |
| 流场参数 | 1 | 1 | 1 |
| 风速/(km/h) | 12.02 | 15.48 | 1.116 |
| 流速/(km/h) | 1.00 | 1.30 | 4.08 |
| 能见度/n mile | 17.05 | 15.25 | 9.68 |
| 搜索单元类型 | 商船 | 商船 | 航空器 |
| 搜索单元数量 | 1 | 2 | 4 |
| 有效扫视宽度/ n mile | 0.7 | 0.7 | 0.1 |
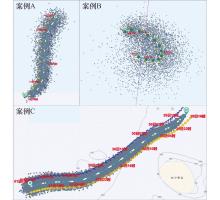
图14
各案例散点分布及预测路径"
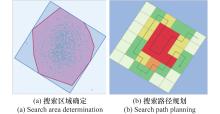
图15
案例A规划结果"
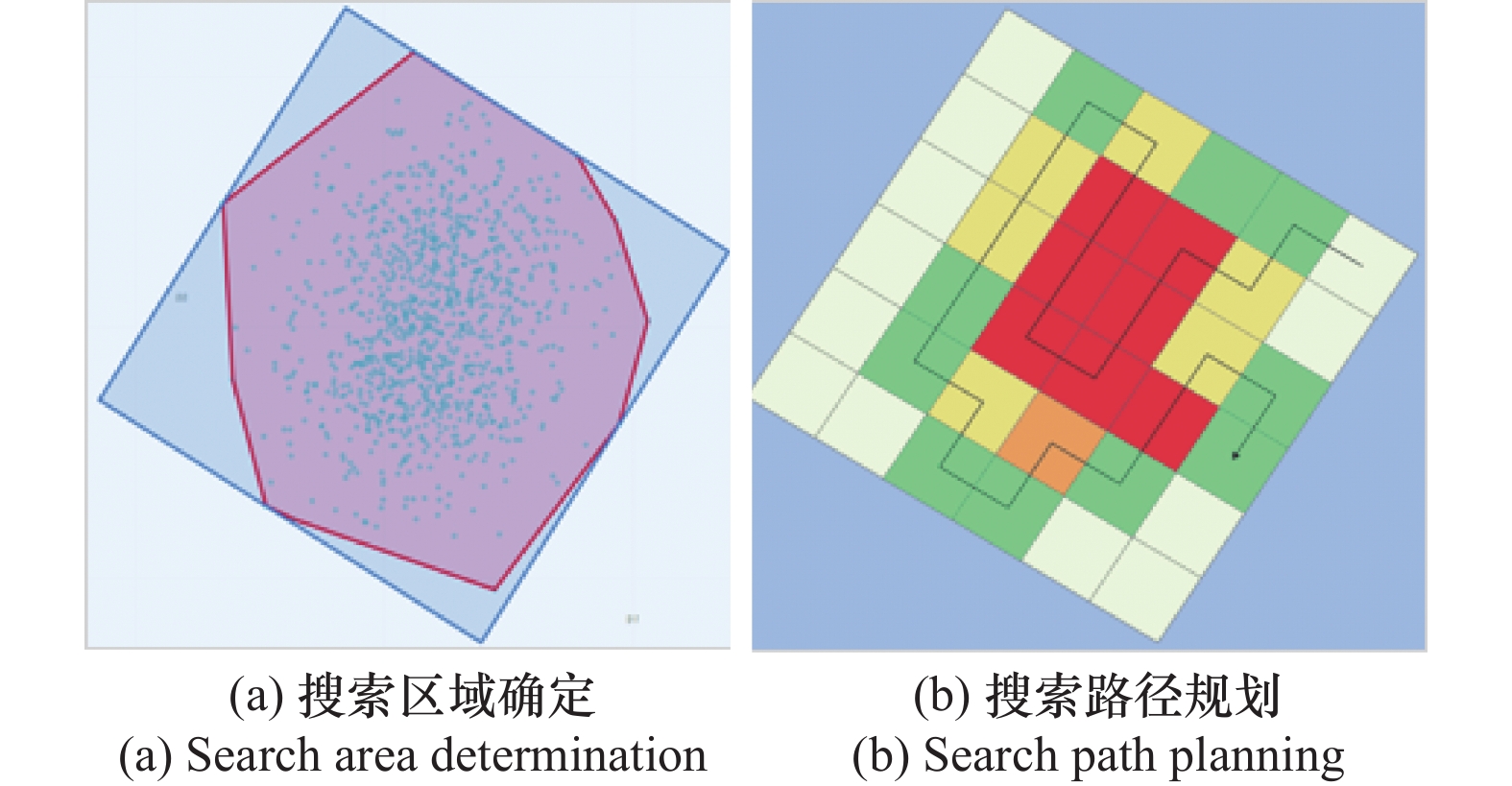
图16
案例B规划结果"
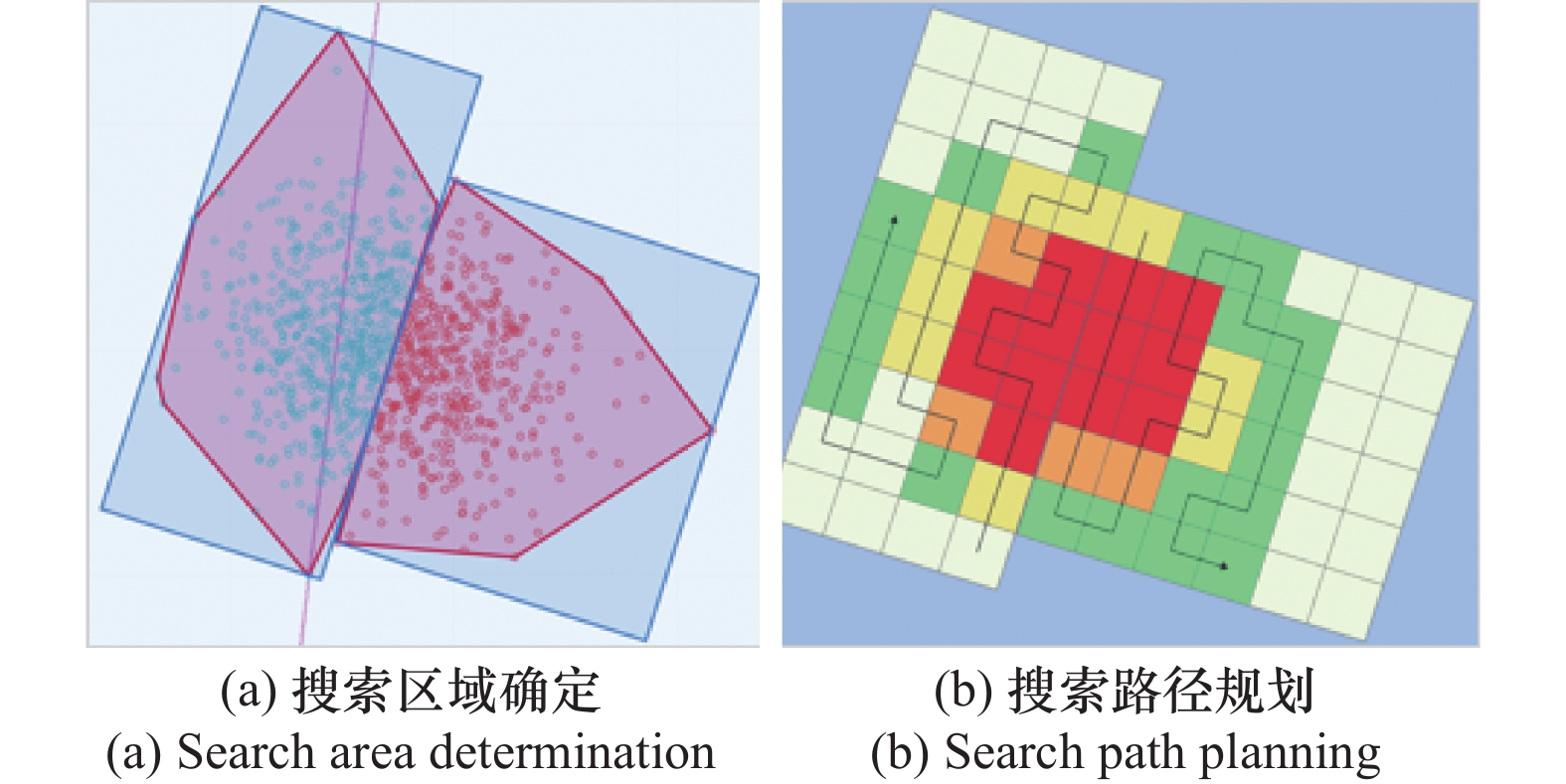
图17
案例C规划结果"
| 1 |
ZHENG L X, WU M Q, ZHAO J, et al. Effects of Ulva prolifera dissipation on the offshore environment based on remote sensing images and field monitoring data[J]. Acta Oceanologica Sinica, 2023, 42 (6): 112- 120.
doi: 10.1007/s13131-022-2129-7 |
| 2 |
YANG D, YUEN K V, GU X F, et al. Influences of environmental factors on the dissipation of green tides in the Yellow Sea, China[J]. Marine Pollution Bulletin, 2023, 189, 114737.
doi: 10.1016/j.marpolbul.2023.114737 |
| 3 |
LIU Z K, HAN Z H, CHEN Q, et al. Risk assessment of marine oil spills using dynamic Bayesian network analyses[J]. Environmental Pollution, 2023, 317, 120716.
doi: 10.1016/j.envpol.2022.120716 |
| 4 |
LI J Q, ZHANG G Q, JIANG C Y, et al. A survey of maritime unmanned search system: theory, applications and future directions[J]. Ocean Engineering, 2023, 285, 115359.
doi: 10.1016/j.oceaneng.2023.115359 |
| 5 |
KOOPMAN B O. The theory of search. I. kinematic bases[J]. Operations Research, 1956, 4 (3): 324- 346.
doi: 10.1287/opre.4.3.324 |
| 6 |
KOOPMAN B O. The theory of search. II. target detection[J]. Operations Research, 1956, 4 (5): 503- 531.
doi: 10.1287/opre.4.5.503 |
| 7 |
KOOPMAN B O. The theory of search: III. the optimum distribution of searching effort[J]. Operations Research, 1957, 5 (5): 613- 626.
doi: 10.1287/opre.5.5.613 |
| 8 |
杨克巍, 梁笑天, 郭玙, 等. 海上搜寻理论方法与搜救决策支持系统现状及发展[J]. 海岸工程, 2021, 40 (4): 291- 302.
doi: 10.3969/j.issn.1002-3682.2021.04.006 |
|
YANG K W, LIANG X T, GUO Y, et al. Status and development of maritime search theory and search and rescue decision support system[J]. Coastal Engineering, 2021, 40 (4): 291- 302.
doi: 10.3969/j.issn.1002-3682.2021.04.006 |
|
| 9 |
BREIVIK O, ALLEN A A. An operational search and rescue model for the Norwegian Sea and the North Sea[J]. Journal of Marine Systems, 2008, 69 (1/2): 99- 113.
doi: 10.1016/j.jmarsys.2007.02.010 |
| 10 | AN D D, ZHANG T C, ZHANG J, et al. Research on drift path prediction technology of ships[C]//Proc. of the International Conference on Computer Modeling, Simulation and Algorithm, 2018: 231−235. |
| 11 | BURCIU Z. Application of Fokker-Planck equation for modeling the search and rescue area at sea[J]. Annual of Navigation, 2002, 4, 21- 32. |
| 12 |
OTOTE D A, LI B, AI B, et al. A decision-making algorithm for maritime search and rescue plan[J]. Sustainability, 2019, 11 (7): 2084.
doi: 10.3390/su11072084 |
| 13 |
ARKIN E M, FEKETE S P, MITCHELL J S B. Approximation algorithms for lawn mowing and milling[J]. Computational Geometry, 2000, 17 (1/2): 25- 50.
doi: 10.1016/S0925-7721(00)00015-8 |
| 14 |
HERMANS B, LEUS R, MATUSCHKE J. Exact and approximation algorithms for the expanding search problem[J]. INFORMS Journal on Computing, 2022, 34 (1): 281- 296.
doi: 10.1287/ijoc.2020.1047 |
| 15 |
MORIN M, ABI-ZEID I, QUIMPER C G. Ant colony optimization for path planning in search and rescue operations[J]. European Journal of Operational Research, 2023, 305 (1): 53- 63.
doi: 10.1016/j.ejor.2022.06.019 |
| 16 |
LI X W, GAO M, KANG Z, et al. Collaborative search and rescue based on swarm of H-MASSs using consensus theory[J]. Ocean Engineering, 2023, 278, 114426.
doi: 10.1016/j.oceaneng.2023.114426 |
| 17 |
DAH-ACHINANON U, BAJESTANI S E M, LAJOIE P Y, et al. Search and rescue with sparsely connected swarms[J]. Autonomous Robots, 2023, 47 (7): 849- 863.
doi: 10.1007/s10514-022-10080-7 |
| 18 |
LAPORTE G, LOUVEAUX F, MERCURE H. Models and exact solutions for a class of stochastic location-routing problems[J]. European Journal of Operational Research, 1989, 39 (1): 71- 78.
doi: 10.1016/0377-2217(89)90354-8 |
| 19 |
AGNETIS A, HERMANS B, LEUS R, et al. Time-critical testing and search problems[J]. European Journal of Operational Research, 2022, 296 (2): 440- 452.
doi: 10.1016/j.ejor.2021.03.038 |
| 20 | 李苯帅. 基于最优搜寻理论的海上搜救方案规划方法研究[D]. 青岛: 山东科技大学, 2020. |
| LI B S. Research on planning method of maritime search and rescue based on optimal search theory[D]. Qingdao: Shandong University of Science and Technology, 2020. | |
| 21 | CHO S W, PARK H J, LEE H, et al. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations[J]. Computers & Industrial Engineering, 2021, 161, 107612. |
| 22 | SUTTON R S, BARTO A G. Reinforcement learning: an introduction[M]. Cambridge: MIT Press, 2018. |
| 23 |
AI B, JIA M X, XU H W, et al. Coverage path planning for maritime search and rescue using reinforcement learning[J]. Ocean Engineering, 2021, 241, 110098.
doi: 10.1016/j.oceaneng.2021.110098 |
| 24 |
WOO J, YU C, KIM N. Deep reinforcement learning-based controller for path following of an unmanned surface vehicle[J]. Ocean Engineering, 2019, 183, 155- 166.
doi: 10.1016/j.oceaneng.2019.04.099 |
| 25 |
杨清清, 高盈盈, 郭玙, 等. 基于深度强化学习的海战场目标搜寻路径规划[J]. 系统工程与电子技术, 2022, 44 (11): 3486- 3495.
doi: 10.12305/j.issn.1001-506X.2022.11.24 |
|
YANG Q Q, GAO Y Y, GUO Y, et al. Target search path planning for naval battle field based on deep reinforcement learning[J]. Systems Engineering and Electronics, 2022, 44 (11): 3486- 3495.
doi: 10.12305/j.issn.1001-506X.2022.11.24 |
|
| 26 | 高松, 徐江玲, 艾波, 等. 基于SOA架构的国家海上搜救环境服务保障平台研发与应用[J]. 海洋预报, 2019, 36 (3): 71- 77. |
| GAO S, XU J L, AI B, et al. National maritime search and rescue support platform based on service-oriented architecture[J]. Marine Forecasts, 2019, 36 (3): 71- 77. | |
| 27 |
AI B, LI B, GAO S, et al. An intelligent decision algorithm for the generation of maritime search and rescue emergency response plans[J]. IEEE Access, 2019, 7, 155835- 155850.
doi: 10.1109/ACCESS.2019.2949366 |
| 28 | FROST J R. Principles of search theory, part I: detection[J]. Response, 1999, 17 (2): 1- 7. |
| 29 | 刘广强. 海上搜寻中确定扫海宽度的研究[D]. 大连: 大连海事大学, 2009. |
| LIU G Q. Research on determining sweep widths for sea searches[D]. Dalian: Dalian Maritime University, 2009. | |
| 30 |
MELKMAN A A. On-line construction of the convex hull of a simple polyline[J]. Information Processing Letters, 1987, 25 (1): 11- 12.
doi: 10.1016/0020-0190(87)90086-X |
| 31 | TOUSSAINT G T. Solving geometric problems with the rotating calipers[C]//Proc. of the IEEE Mediterranean Electrotechnical Conference, 1983, 83: 10−17. |
| 32 | MINSKY M. Steps toward artificial intelligence[J]. Proceedings of the IRE, 1963, 49 (1): 8- 30. |
| [1] | 林志康, 刘甲磊, 马佳智, 施龙飞, 徐进宝. 利用分布式辐射源闪烁诱偏的抗反辐射方法[J]. 系统工程与电子技术, 2026, 48(1): 1-11. |
| [2] | 薛锦妍, 张雅声, 陶雪峰, 杨茗棋, 赵帅龙. GEO航天器轨道机动控制研究进展[J]. 系统工程与电子技术, 2026, 48(1): 290-300. |
| [3] | 宋传龙, 张倩武, 何健, 周文骏, 王辉, 孔巍巍, 田文波. 基于MADDPG算法的星地协同边缘计算任务卸载方法[J]. 系统工程与电子技术, 2026, 48(1): 350-360. |
| [4] | 姚鹏, 韩美玉, 王德川, 高志诚. 基于对抗进化强化学习的多无人艇追捕方法[J]. 系统工程与电子技术, 2025, 47(9): 2960-2970. |
| [5] | 魏潇龙, 吴亚荣, 姚登凯, 赵顾颢. 基于深度强化学习的无人机空战机动分层决策算法[J]. 系统工程与电子技术, 2025, 47(9): 2993-3003. |
| [6] | 杨大鹏, 龚资浩, 王小也, 郭正玉, 罗德林. 基于多智能体强化学习的无人机协同截击机动决策研究[J]. 系统工程与电子技术, 2025, 47(9): 3076-3085. |
| [7] | 羊钊, 胡锦标, 王艳, 齐洪彪. 考虑异巢起降的无人机山地巡检覆盖路径规划[J]. 系统工程与电子技术, 2025, 47(8): 2622-2631. |
| [8] | 符小卫, 王辛夷, 乔哲. 基于APIQ算法的多无人机攻防对抗策略[J]. 系统工程与电子技术, 2025, 47(7): 2205-2215. |
| [9] | 柳佳豪, 徐任杰, 孙茂桐, 姜九瑶, 李际超, 杨克巍. 基于强化学习的装备体系韧性优化方法[J]. 系统工程与电子技术, 2025, 47(7): 2216-2223. |
| [10] | 朱运豆, 孙海权, 胡笑旋. 基于指针网络架构的多星协同成像任务规划方法[J]. 系统工程与电子技术, 2025, 47(7): 2246-2255. |
| [11] | 焉晓贞, 周新悦, 罗清华. 改进A-star算法的无人船动态路径规划[J]. 系统工程与电子技术, 2025, 47(7): 2314-2328. |
| [12] | 唐俊超, 胡春鹤. 三维地形风场环境下无人机全覆盖路径规划[J]. 系统工程与电子技术, 2025, 47(7): 2349-2356. |
| [13] | 符小卫, 王辛夷, 乔哲. 基于ASDDPG算法的多无人机对抗策略[J]. 系统工程与电子技术, 2025, 47(6): 1867-1879. |
| [14] | 孟麟芝, 孙小涓, 胡玉新, 高斌, 孙国庆, 牟文浩. 面向卫星在轨处理的强化学习任务调度算法[J]. 系统工程与电子技术, 2025, 47(6): 1917-1929. |
| [15] | 刘伊婕, 姜斌, 马亚杰, 李文博, 刘成瑞. 无人艇编队避碰路径规划与重规划[J]. 系统工程与电子技术, 2025, 47(6): 1964-1974. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||