
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (6): 2002-2014.doi: 10.12305/j.issn.1001-506X.2025.06.28
赵新运, 解春雷
收稿日期:2024-08-23
出版日期:2025-06-25
发布日期:2025-07-09
通讯作者:
解春雷
作者简介:赵新运(1998—), 男, 助理工程师, 硕士, 主要研究方向为飞行器总体设计、飞行力学与控制Xinyun ZHAO, Chunlei XIE
Received:2024-08-23
Online:2025-06-25
Published:2025-07-09
Contact:
Chunlei XIE
摘要:
针对具有大惯性、低动态、飞行速度与环境风场在同一量级等特点的平流层飞艇航迹跟踪问题, 提出一种平流层飞艇航迹跟踪鲁棒控制方法。通过引入风干扰力和力矩模型, 建立精细化风场干扰影响的平流层飞艇动力学模型。针对平流层飞艇制导回路中的风干扰, 提出一种融合扩张状态观测器与模糊逻辑的视线制导律, 利用扩张状态观测器实时估计地速侧滑角, 消除观测误差对系统造成的干扰, 基于模糊逻辑自适应调整前视距离, 在不改变远离期望航迹时跟踪误差收敛速度的前提下, 进一步减小靠近期望航迹时的振荡。针对平流层飞艇姿态控制回路中的风干扰和气动参数摄动, 基于非奇异终端滑模面与模糊变系数双幂次趋近律设计偏航角跟踪控制律, 利用扩张状态观测器消除内外扰动对姿态控制回路造成的负面影响, 抑制抖振。基于李雅普诺夫理论证明制导律与姿态控制律的稳定性, 通过仿真验证所提方法的合理性与有效性, 并与传统方法进行仿真对比, 验证所提方法有利于提高航迹跟踪的鲁棒性。
中图分类号:
赵新运, 解春雷. 平流层飞艇航迹跟踪鲁棒控制方法[J]. 系统工程与电子技术, 2025, 47(6): 2002-2014.
Xinyun ZHAO, Chunlei XIE. Flight path following robust control method for stratospheric airship[J]. Systems Engineering and Electronics, 2025, 47(6): 2002-2014.
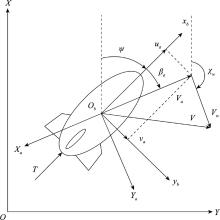
图1
平流层飞艇受力分析图"
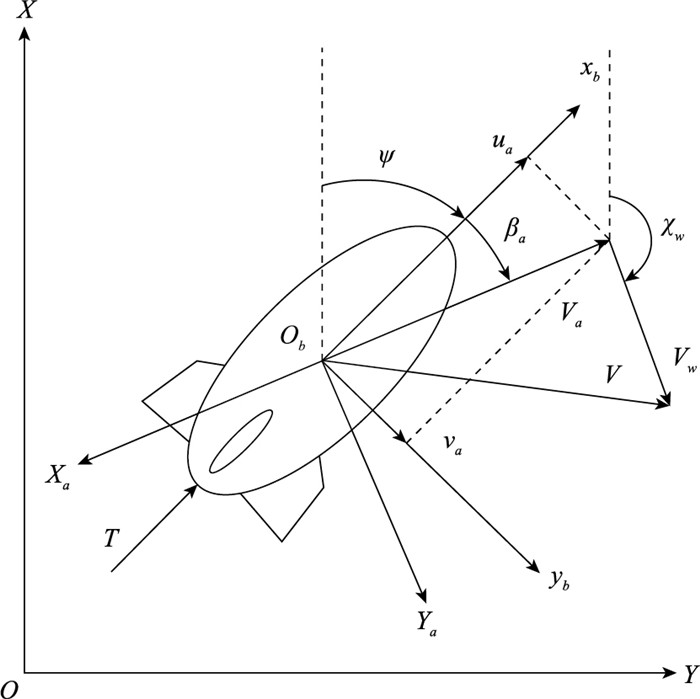
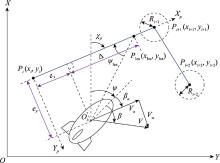
图2
平流层飞艇制导几何关系图"
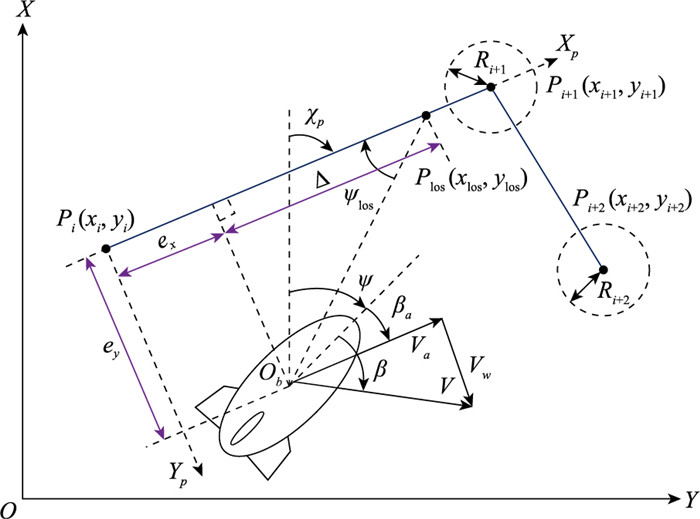
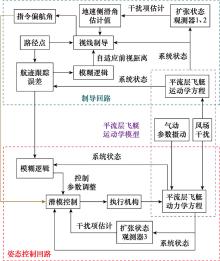
图3
平流层飞艇航迹跟踪控制原理框图"
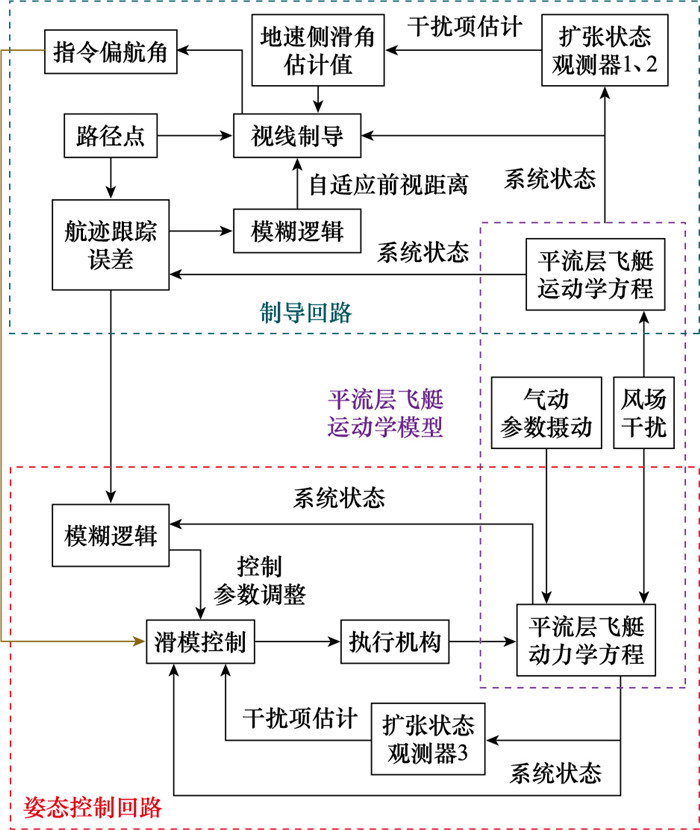
表1
参数kΔ的模糊规则"
| |ey| | kΔ |
| ZO | PS |
| PS | PM |
| PM | PB |
| PB | PB |
表2
前视距离参数"
| 前视距离参数 | 集合元素 | 数值 |
| |ey| | ZO/m | 0 |
| PS/m | 500 | |
| PM/m | 1 000 | |
| PB/m | >1 000 | |
| kΔ | PS | 0.2 |
| PM | 1 | |
| PB | 2 | |
| aΔ | - | 0.000 5 |
| Δmin/m | - | 10 |
| Δmax/m | - | 800 |
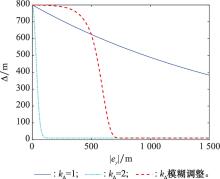
图4
不同|ey|对应的前视距离Δ变化"
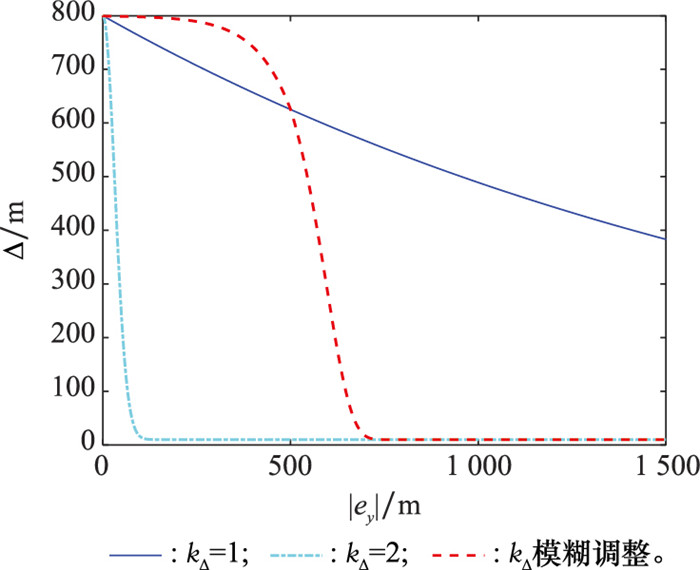
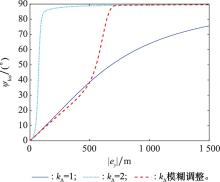
图5
不同|ey|对应的前视角ψlos的变化"
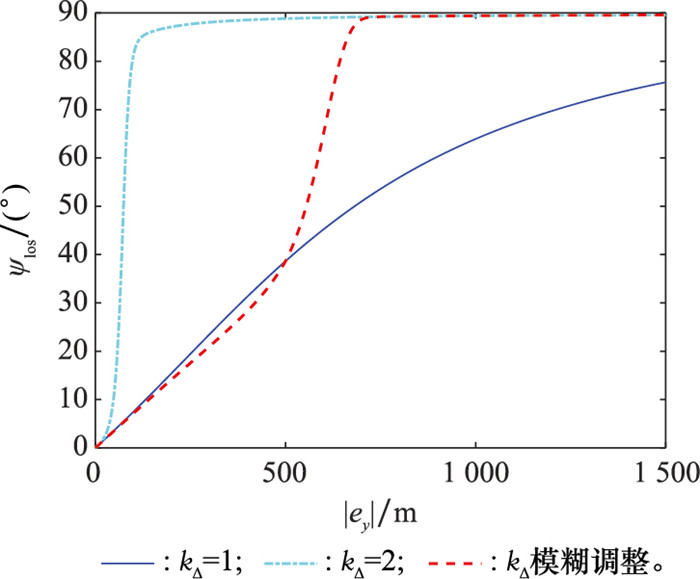
表3
控制参数kp的模糊规则"
| |ey| | |βa| | |||
| ZO | PS | PM | PB | |
| ZO | ZO | ZO | ZO | ZO |
| PS | PM | PS | ZO | ZO |
| PM | PB | PB | PM | PM |
| PB | PB | PB | PM | PM |
表4
平流层飞艇的初始状态"
| 初始状态 | 数值 | 初始状态 | 数值 | |
| ua/(m/s) | 15 | x/m | 0 | |
| va/(m/s) | 0 | y/m | 0 | |
| r/(°/s) | 0 | ψ/(°) | 50 |
表5
平流层飞艇的结构参数"
| 参数 | 数值 | 参数 | 数值 | |
| 飞行高度/km | 20 | 表观系数k11 | 0.11 | |
| 质量/kg | 7 000 | 表观系数k22 | 0.83 | |
| 转动惯量/(kg·m2) | 5.1×106 | 表观系数k66 | 0.10 | |
| 体积/m3 | 7.5×104 | - | - |
表6
平流层飞艇的气动参数"
| 气动参数 | 数值 | 气动参数 | 数值 | |
| Cnr | -0.25 | CX | 0.045 | |
| Cnβ | 1.18 | CYβ | -11.23 |
表7
姿态控制律参数"
| 控制参数 | 集合元素 | 数值 |
| |βa|/(°) | ZO | 0 |
| PS | 1 | |
| PM | 3 | |
| PB | >3 | |
| kp | ZO | 0 |
| PS | 1 | |
| PM | 2 | |
| PB | 3 | |
| k0 | - | 5 |
| k1 | - | 0.5 |
| k2 | - | 0.5 |
| k3 | - | 0.5 |
| k4 | - | 0.5 |
| p | - | 7 |
| q | - | 5 |
| a1 | - | 1.5 |
| a2 | - | 0.58 |
| D | - | 0.5 |
表8
平流层飞艇的ESO参数"
| ESO参数 | 数值 | ESO参数 | 数值 | |
| m1、m3 | 0.9 | m5 | 0.95 | |
| σ1、σ3 | 10 | σ5 | 1.1 | |
| σ2、σ4 | 100 | σ6 | 1.2 | |
| c1、c3 | 0.05 | c5 | 0.9 | |
| c2、c4 | 1 | c6 | 0.02 | |
| μ | 0.05 | τ | 100 |
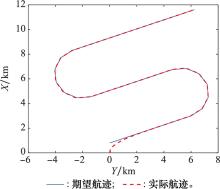
图6
航迹跟踪曲线"
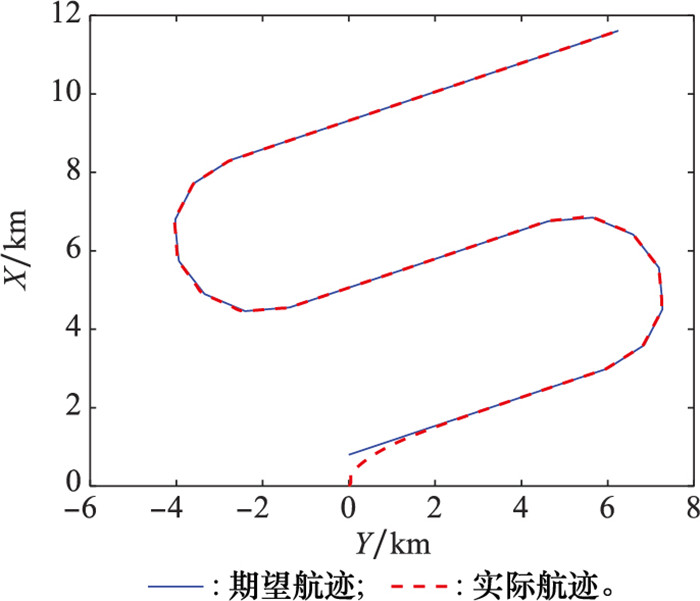
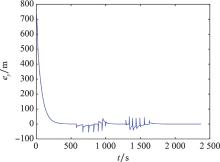
图7
法向航迹跟踪误差曲线"
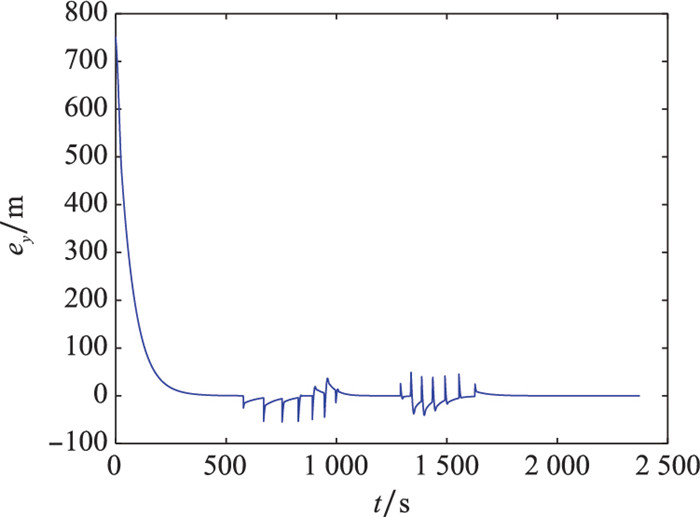
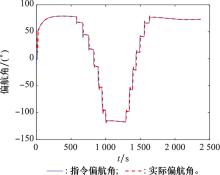
图8
指令偏航角与实际偏航角曲线"
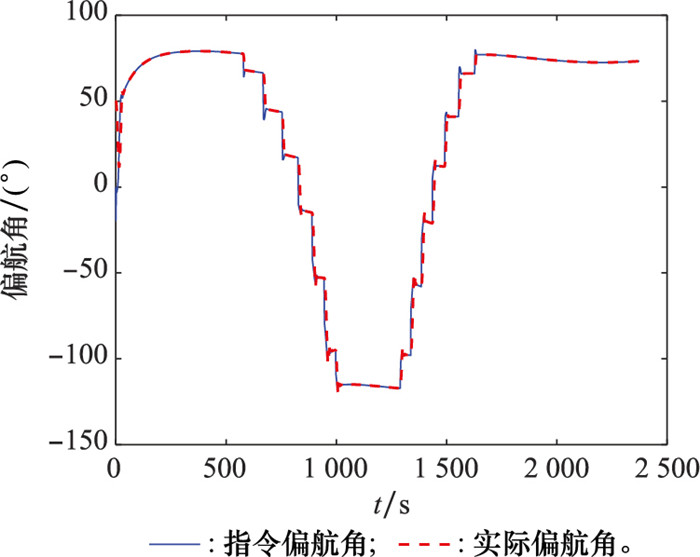
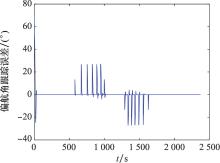
图9
偏航角跟踪误差曲线"
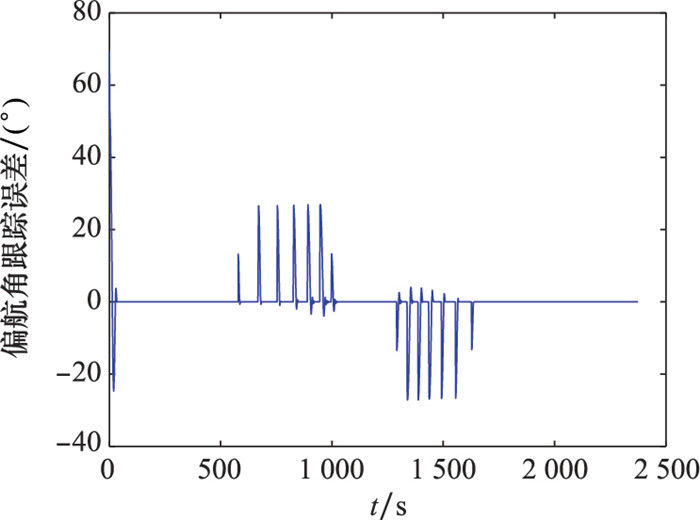
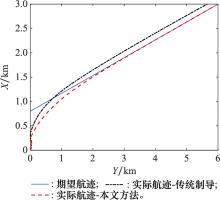
图10
航迹跟踪曲线"
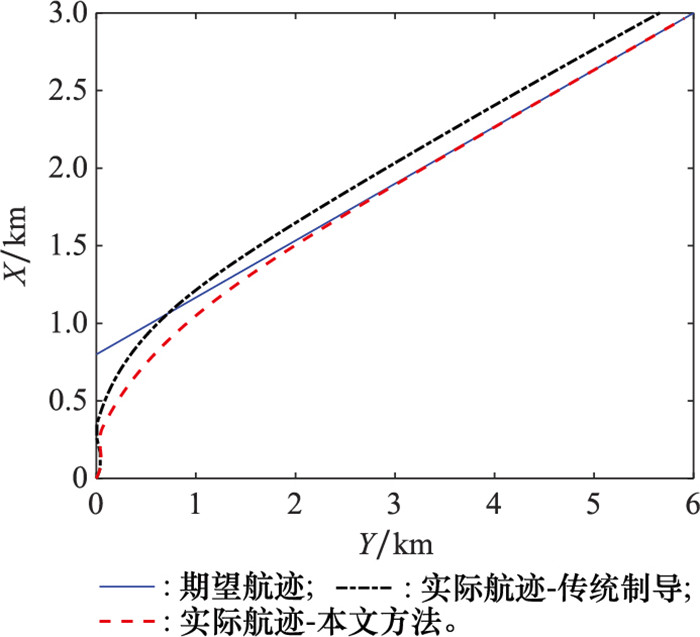
图11
偏航角曲线"
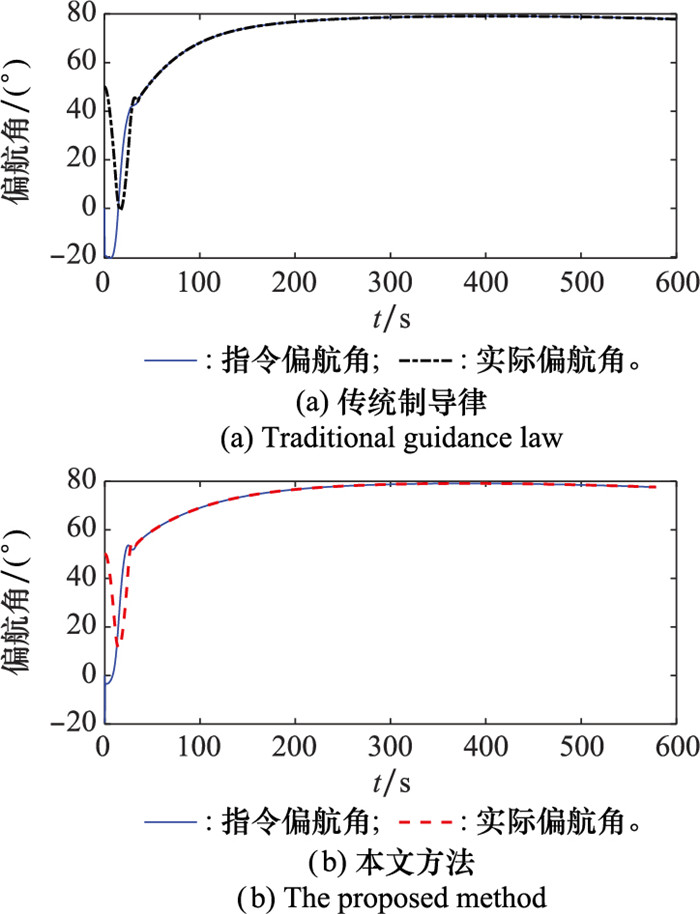
图12
侧滑角曲线"
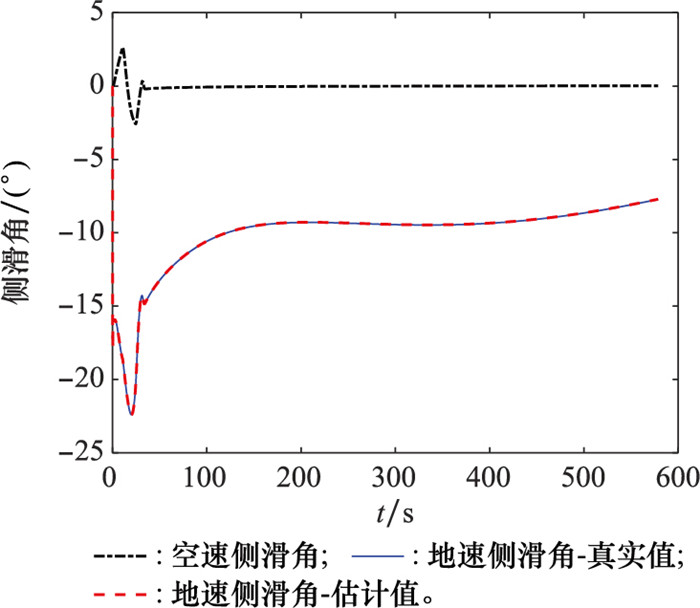
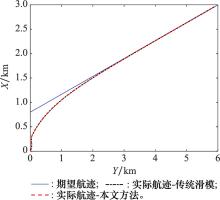
图13
航迹跟踪曲线"
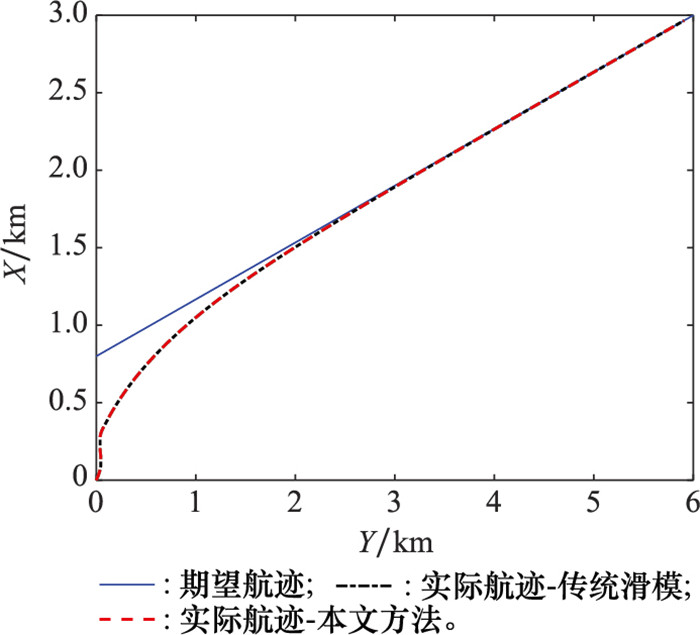
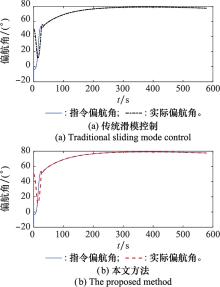
图14
偏航角曲线"
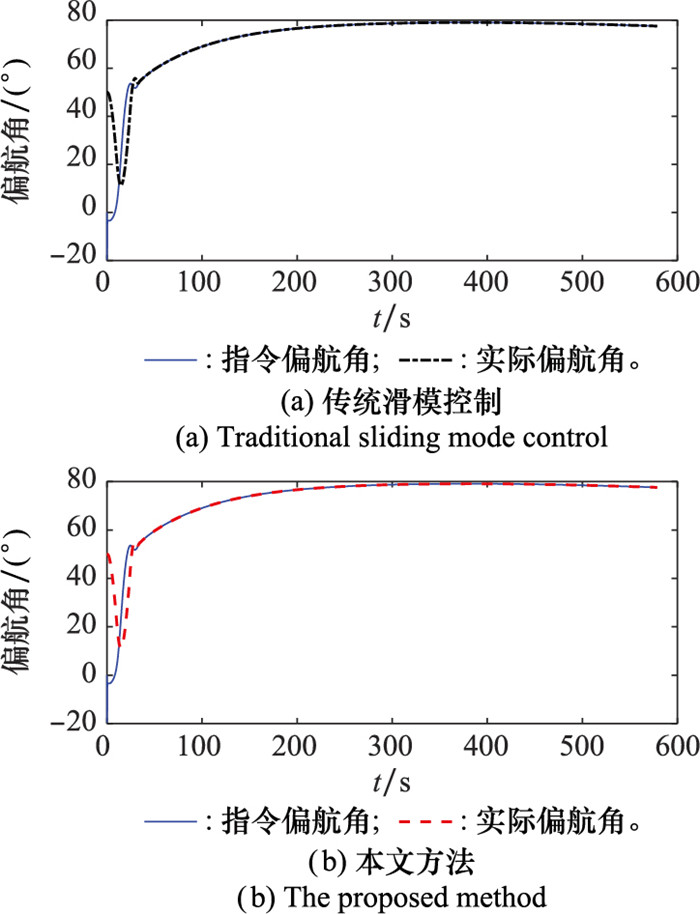

图15
偏航角加速度曲线"
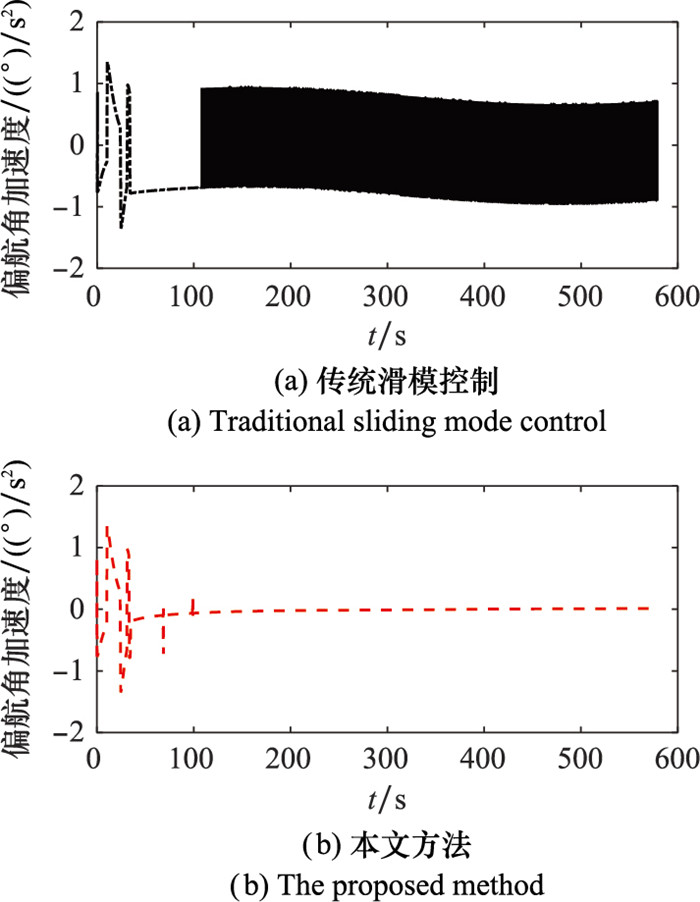
图16
推力矩曲线"
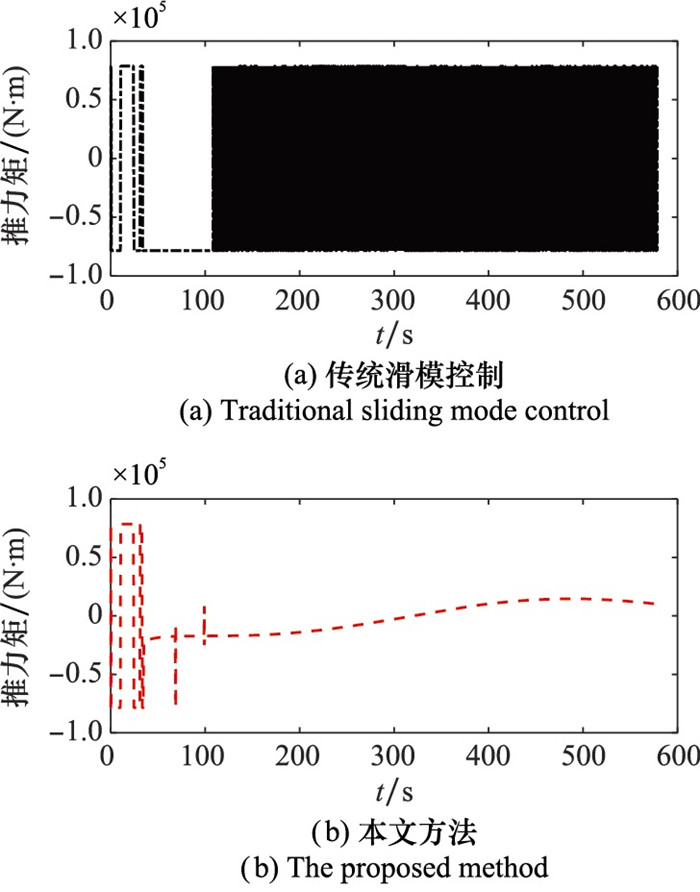
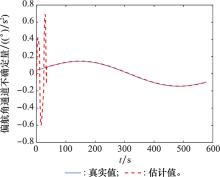
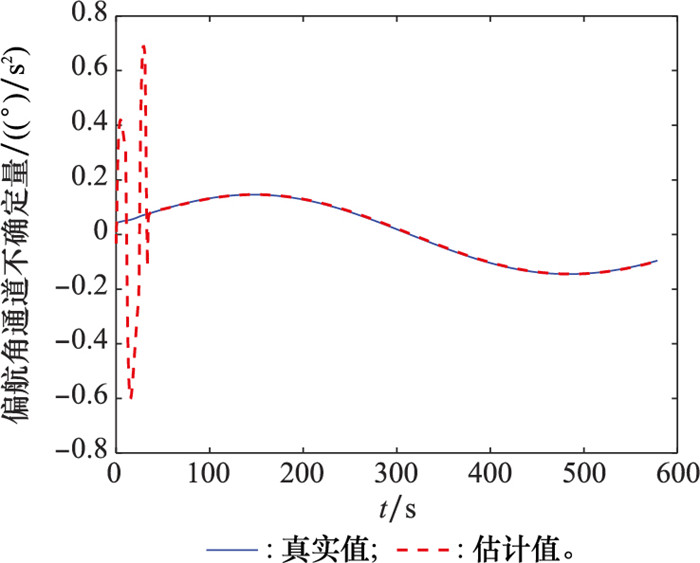
图17
偏航角通道不确定量曲线"
| 2 | 杨晓伟. 风场中平流层飞艇轨迹智能控制方法[D]. 长沙: 国防科技大学, 2020. |
| YANG X W. Intelligent trajectory control methods for stratospheric airships in wind field[D]. Changsha: National University of Defense Technology, 2020. | |
| 3 | 赵达, 刘东旭, 孙康文, 等. 平流层飞艇研制现状、技术难点及发展趋势[J]. 航空学报, 2016, 37 (1): 45- 56. |
| ZHAO D , LIU D X , SUN K W , et al. Research status, technical difficulties and development trend of stratospheric airship[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37 (1): 45- 56. | |
| 4 | 杨希祥, 杨晓伟, 邓小龙. 反步法与神经网络融合的平流层飞艇轨迹鲁棒控制方法[J]. 宇航学报, 2021, 42 (3): 351- 358. |
| YANG X X , YANG X W , DENG X L . Robust trajectory control method for stratopheric airships with combintion of backstepping and neural network[J]. Acta Astronautica, 2021, 42 (3): 351- 358. | |
| 5 | 杨希祥, 张家实. 风场中平流层飞艇轨迹跟踪的滑模控制方法[J]. 国防科技大学学报, 2019, 41 (1): 1- 4. |
| YANG X X , ZHANG J S . Sliding mode control for trajectory tracking of stratospheric airships in wind field[J]. Journal of National University of Defense Technology, 2019, 41 (1): 1- 4. | |
| 6 |
CHENG L , ZUO Z Y , SONG J W , et al. Robust three-dimensional path-following control for an under-actuated stratospheric airship[J]. Advances in Space Research, 2019, 63 (1): 526- 538.
doi: 10.1016/j.asr.2018.09.008 |
| 7 |
WANG J , MENG X Y , WU G H . Path following of the autonomous airship with compensation of unknown wind and modeling uncertainties[J]. Aerospace Science and Technology, 2019, 93, 105349.
doi: 10.1016/j.ast.2019.105349 |
| 8 |
LIU S Q , SANG Y J . Underactuated stratospheric airship trajectory control using an adaptive integral backstepping approach[J]. Journal of Aircraft, 2018, 55 (6): 2357- 2371.
doi: 10.2514/1.C034923 |
| 9 |
ADAMSKI W , PAZDERSKI D , HERMAN P . Robust 3D tracking control of an underactuated autonomous airship[J]. IEEE Robo-tics and Automation Letters, 2020, 5 (3): 4281- 4288.
doi: 10.1109/LRA.2020.2994484 |
| 10 |
LOU W J , ZHU M , GUO X , et al. Command filtered sliding mode trajectory tracking control for unmanned airships based on RBFNN approximation[J]. Advances in Space Research, 2019, 63 (3): 1111- 1121.
doi: 10.1016/j.asr.2018.10.017 |
| 11 |
YANG Y N , YAN Y . Neural network approximation-based nonsingular terminal sliding mode control for trajectory tracking of robotic airships[J]. Aerospace Science and Technology, 2016, 54, 192- 197.
doi: 10.1016/j.ast.2016.04.021 |
| 12 |
SAEED A , LIU Y , SHAH M Z , et al. Higher order sliding mode based lateral guidance and control of finless airship[J]. Aerospace Science and Technology, 2021, 113, 106670.
doi: 10.1016/j.ast.2021.106670 |
| 13 |
LIU S Q , SANG Y J , WHIDBORNE J F . Adaptive sliding-mode- backstepping trajectory tracking control of underactuated airships[J]. Aerospace Science and Technology, 2020, 97, 105610.
doi: 10.1016/j.ast.2019.105610 |
| 14 |
LIU S Q , WHIDBORNE J F , HE L . Backstepping sliding-mode control of stratospheric airships using disturbance-observer[J]. Advances in Space Research, 2021, 67 (3): 1174- 1187.
doi: 10.1016/j.asr.2020.10.047 |
| 15 |
LIU Y , SAEED A , SHAH M Z , et al. Sliding mode lateral stand-off tracking control of finless airship[J]. Aerospace Science and Technology, 2021, 119, 107164.
doi: 10.1016/j.ast.2021.107164 |
| 16 |
GOU H B , ZHU M , ZHENG Z W , et al. Adaptive fault-tole-rant control for stratospheric airships with full-state constraints, input saturation, and external disturbances[J]. Advances in Space Research, 2022, 69 (1): 701- 717.
doi: 10.1016/j.asr.2021.09.015 |
| 17 |
YUAN J C , GUO X , ZHENG Z W , et al. Error-constrained fixed-time trajectory tracking control for a stratospheric airship with disturbances[J]. Aerospace Science and Technology, 2021, 118, 107055.
doi: 10.1016/j.ast.2021.107055 |
| 18 |
CHEN T , ZHU M , ZHENG Z W . Adaptive path following control of a stratospheric airship with full-state constraint and actuator saturation[J]. Aerospace Science and Technology, 2019, 95, 105457.
doi: 10.1016/j.ast.2019.105457 |
| 1 |
洪陆合, 林献武, 兰维瑶. 基于奇异摄动法的平流层飞艇水平面轨迹优化[J]. 系统工程与电子技术, 2014, 36 (4): 728- 733.
doi: 10.3969/j.issn.1001-506X.2014.04.20 |
|
HONG L H , LIN X W , LAN W Y . Trajectory optimization of stratosphere airship in horizontal based on singular perturbation metod[J]. Systems Engineering and Electronics, 2014, 36 (4): 728- 733.
doi: 10.3969/j.issn.1001-506X.2014.04.20 |
|
| 19 |
YANG X W , YANG X X , DENG X L . Horizontal trajectory control of stratospheric airships in wind field using Q-learning algorithm[J]. Aerospace Science and Technology, 2020, 106, 106100.
doi: 10.1016/j.ast.2020.106100 |
| 20 |
AZINHEIRA J R , PAIVA E C , BUENO S S . Influence of wind speed on airship dynamics[J]. Journal of Guidance, Control and Dynamics, 2002, 25 (6): 1116- 1124.
doi: 10.2514/2.4991 |
| 21 |
FOSSEN T I , PETTERSEN K Y . On uniform semiglobal exponential stability (USGES) of proportional line-of-sight gui-dance laws[J]. Automatica, 2014, 50 (11): 2912- 2917.
doi: 10.1016/j.automatica.2014.10.018 |
| 22 |
LEKKAS A M , FOSSEN T I . Integral LOS path following for curved paths based on a monotone cubic hermite spline parametrization[J]. IEEE Trans.on Control Systems Technology, 2014, 22 (6): 2287- 2301.
doi: 10.1109/TCST.2014.2306774 |
| 23 |
LIU L , WANG D , PENG Z H . ESO-based line-of-sight gui-dance law for path following of underactuated marine surface vehicles with exact sideslip compensation[J]. IEEE Journal of Oceanic Engineering, 2017, 42 (2): 477- 487.
doi: 10.1109/JOE.2016.2569218 |
| 24 |
LIU L , WANG D , PENG Z H . Coordinated path following of multiple underacutated marine surface vehicles along one curve[J]. ISA Transactions, 2016, 64, 258- 268.
doi: 10.1016/j.isatra.2016.04.013 |
| 25 |
XIONG S F , WANG W H , LIU X D , et al. A novel extended state observer[J]. ISA Transactions, 2015, 58, 309- 317.
doi: 10.1016/j.isatra.2015.07.012 |
| 26 |
FENG Y , YU X H , MAN Z H . Non-singular terminal sliding mode control of rigid manipulators[J]. Automatica, 2002, 38 (12): 2159- 2167.
doi: 10.1016/S0005-1098(02)00147-4 |
| 27 | 梅红, 王勇. 快速收敛的机器人滑模变结构控制[J]. 信息与控制, 2009, 38 (5): 552- 557. |
| MEI H , WANG Y . Fast convergent sliding mode variable structure control of robot[J]. Information and Control, 2009, 38 (5): 552- 557. |
| [1] | 陆正亮, 李镓彤, 胡远东, 廖文和. 低轨质量矩航天器姿态动力学与气动补偿控制[J]. 系统工程与电子技术, 2025, 47(6): 1975-1984. |
| [2] | 郭博, 铁鸣, 范文慧, 李传旭. 基于滑模控制的高升阻比飞行器协同制导方法[J]. 系统工程与电子技术, 2025, 47(2): 580-590. |
| [3] | 张文稳, 张成, 郑晨明, 程润北, 陈天乐. 基于载机视觉信息的改进视线制导律设计[J]. 系统工程与电子技术, 2024, 46(8): 2779-2788. |
| [4] | 杨登峰, 闫晓东. 基于视线协同和DMPC的载机-防御弹群协同主动防御制导策略[J]. 系统工程与电子技术, 2024, 46(5): 1724-1733. |
| [5] | 赵新运, 于剑桥. 新型迅捷弹箭多源力组合控制方法[J]. 系统工程与电子技术, 2024, 46(5): 1734-1744. |
| [6] | 郑秋实, 许伟春, 赵明翰, 李乃星, 包旭馨. 可旋转翼式弹道修正组件滚转控制技术研究[J]. 系统工程与电子技术, 2024, 46(4): 1412-1421. |
| [7] | 桂洋, 郑柏超, 高鹏. 基于NESO-LFDC的四旋翼无人机滑模姿态控制[J]. 系统工程与电子技术, 2024, 46(3): 1075-1083. |
| [8] | 孙谷昊, 蔡中泽, 曾庆双. 多智能体编队加权中心点固定时间分布式跟踪控制[J]. 系统工程与电子技术, 2024, 46(12): 4165-4172. |
| [9] | 姜雨石, 陈旸, 高路, 蔡李根, 吕吉星. 重型运载火箭预设时间自适应控制[J]. 系统工程与电子技术, 2023, 45(8): 2570-2577. |
| [10] | 吴立尧, 苏析超, 王垒, 潘子双. 有人/无人机编队队形集结控制研究[J]. 系统工程与电子技术, 2023, 45(7): 2192-2202. |
| [11] | 李方俊, 王生捷, 李俊峰, 李浩, 崔臣君. 基于新型趋近率的含齿隙随动系统鲁棒控制[J]. 系统工程与电子技术, 2023, 45(4): 1177-1184. |
| [12] | 陆浩然, 郑伟, 常晓华. 基于鲁棒精确微分器的分数阶滑模制导律设计[J]. 系统工程与电子技术, 2023, 45(1): 175-183. |
| [13] | 周梦平, 孟秀云, 刘俊辉. 大落角机动目标逆轨拦截最优滑模制导律设计[J]. 系统工程与电子技术, 2022, 44(9): 2886-2893. |
| [14] | 罗世彬, 李晓栋, 王忠森, 徐骋. 并联式运载器上升段广义超螺旋有限时间控制[J]. 系统工程与电子技术, 2022, 44(5): 1626-1635. |
| [15] | 韦俊宝, 李海燕, 李静. 高超声速飞行器新型攻角约束反演控制[J]. 系统工程与电子技术, 2022, 44(4): 1310-1317. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||