
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (3): 951-960.doi: 10.12305/j.issn.1001-506X.2025.03.27
• 制导、导航与控制 • 上一篇
孙海迪, 戴荔, 王沛展, 夏元清
收稿日期:2024-05-22
出版日期:2025-03-28
发布日期:2025-04-18
通讯作者:
戴荔
作者简介:孙海迪 (1993—), 女, 博士研究生, 主要研究方向为模型预测控制理论及应用、高效避障避碰控制理论及应用基金资助:Haidi SUN, Li DAI, Peizhan WANG, Yuanqing XIA
Received:2024-05-22
Online:2025-03-28
Published:2025-04-18
Contact:
Li DAI
摘要:
针对具有不确定性和排除约束的轨迹跟踪控制问题, 提出计算高效的鲁棒模型预测不可达轨迹跟踪控制算法。首先, 引入一条满足所有约束的可行周期参考轨迹, 并计算不确定性系统状态集和所有排除约束集之间的分离超平面, 生成排除约束安全集, 将固有非凸的排除约束凸化为闭多胞体约束。然后, 引入辅助变量, 将具有排除约束的轨迹规划问题和跟踪控制问题集成到同一个优化问题中, 并利用二次规划进行求解, 实际系统状态轨迹收敛于最优可达参考轨迹。此外, 该算法可以保证迭代可行性和鲁棒稳定性。最后, 通过仿真验证了算法的有效性和高效性。
中图分类号:
孙海迪, 戴荔, 王沛展, 夏元清. 具有排除约束的鲁棒模型预测轨迹跟踪控制[J]. 系统工程与电子技术, 2025, 47(3): 951-960.
Haidi SUN, Li DAI, Peizhan WANG, Yuanqing XIA. Robust model predictive control for trajectory tracking with exclusion constraint[J]. Systems Engineering and Electronics, 2025, 47(3): 951-960.
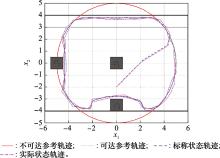
图1
在算法1控制下的不可达轨迹闭环跟踪避障过程图"

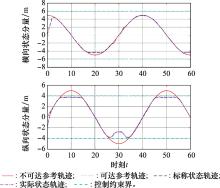
图2
在算法1控制下的闭环状态分量随时间变化图"


图3
在算法1控制下的闭环控制分量随时间变化图"


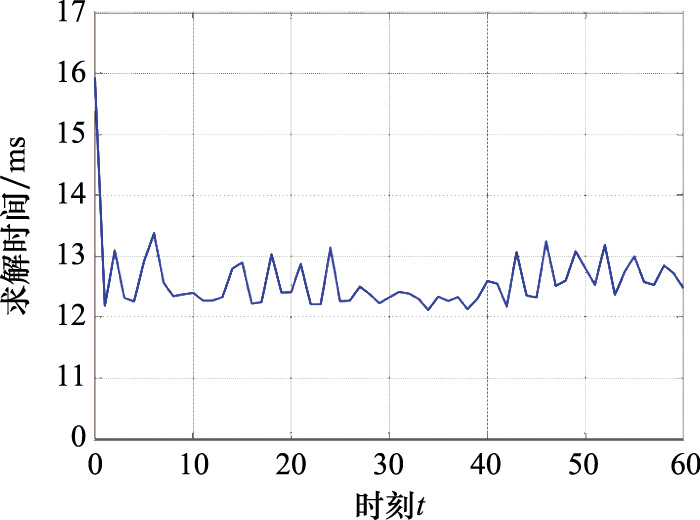
图4
在算法1控制下的闭环跟踪避障优化问题在线求解时间图"
| 1 | RAKOVIĆSV,LEVINEW S.Handbook of model predictive control[M].Cham:Birkhauser, Springer,2018. |
| 2 | RAWLINGSJ B,MAYNED Q.Model predictive control: theory and design[M].Madison:Nob Hill Publishing,2009. |
| 3 |
MAYNED Q.Model predictive control: recent developments and future promise[J].Automatica,2014,50(12):2967-2986.
doi: 10.1016/j.automatica.2014.10.128 |
| 4 |
HOMCHAUDHURIB.Distributionally robust model predictive control for collision avoidance in the presence of stochastic obstacles[J].Proceedings of the Institution of Mechanical Engineers, Part Ⅰ: Journal of Systems and Control Engineering,2023,237(1):26-34.
doi: 10.1177/09544089221088261 |
| 5 |
BAOH Q,KANGQ,SHIX D,et al.Moment-based model predictive control of autonomous systems[J].IEEE Trans.on Intelligent Vehicles,2023,8(4):2939-2953.
doi: 10.1109/TIV.2023.3238023 |
| 6 |
KHANS,GUIVANTJ.Fast nonlinear model predictive planner and control for an unmanned ground vehicle in the presence of disturbances and dynamic obstacles[J].Scientific Reports,2022,12(1):12135.
doi: 10.1038/s41598-022-16226-y |
| 7 |
AJEILF H,IBRAHEEMI K,AZARA H,et al.Autonomous navigation and obstacle avoidance of an omnidirectional mobile robot using swarm optimization and sensors deployment[J].International Journal of Advanced Robotic Systems,2020,17(3):1729881420929498.
doi: 10.1177/1729881420929498 |
| 8 | ZHOU J, GAO Y L, JOHANSSON O, et al. Robust predictive motion planning by learning obstacle uncertainty[EB/OL]. [2024-04-06]. https://arxiv.org/abs/2403.06222. |
| 9 |
WEIH L,SHENC,SHIY.Distributed Lyapunov-based model predictive formation tracking control for autonomous underwater vehicles subject to disturbances[J].IEEE Trans.on Systems, Man, and Cybernetics: Systems,2021,51(8):5198-5208.
doi: 10.1109/TSMC.2019.2946127 |
| 10 |
LIS Y,YED,XIAOY,et al.Robust distributed model predictive control for satellite cluster reconfiguration with collision avoidance[J].Aerospace Science and Technology,2022,130,107917.
doi: 10.1016/j.ast.2022.107917 |
| 11 |
YANGH J,LIUL,YUNH,et al.Modeling and collision avoidance control for the disturbance-free payload spacecraft[J].Acta Astronautica,2019,164,415-424.
doi: 10.1016/j.actaastro.2019.07.025 |
| 12 | LIUX Y,CHANGH T,HUANGP F,et al.Robust output-feedback predictive control for proximity eddy current detumbling with constraints and uncertainty[J].IEEE Trans.on Aerospace and Electronic Systems,2023,59(2):858-870. |
| 13 |
SACCANID,CECCHINL,FAGIANOL.Multitrajectory model predictive control for safe UAV navigation in an unknown environment[J].IEEE Trans.on Control Systems Technology,2023,31(5):1982-1997.
doi: 10.1109/TCST.2022.3216989 |
| 14 |
ZHUH,ALONSO-MORAJ.Chance-constrained collision avoidance for MAVs in dynamic environments[J].IEEE Robotics and Automation Letters,2019,4(2):776-783.
doi: 10.1109/LRA.2019.2893494 |
| 15 | SACCANI D, FAGIANO L. Autonomous UAV navigation in an unknown environment via multi-trajectory model predictive control[C]//Proc. of the European Control Conference, 2021: 1577-1582. |
| 16 |
WENG H,LAMJ,FUJ J,et al.Distributed MPC-based robust collision avoidance formation navigation of constrained multiple USVs[J].IEEE Trans.on Intelligent Vehicles,2024,9(1):1804-1816.
doi: 10.1109/TIV.2023.3315367 |
| 17 | LEEC,VANT Q,KIMJ.Robust path tracking and obstacle avoidance using tube-based model predictive control for surface vehicles[J].International Federation of Automatic Control-PapersOnLine,2022,55(31):301-306. |
| 18 | ABDELAAL M, HAHN A. NMPC-based trajectory tracking and collision avoidance of unmanned surface vessels with rule-based colregs confinement[C]//Proc. of the IEEE Conference on Systems, Process and Control, 2016: 23-28. |
| 19 |
MAYNED Q,POLAKE.Algorithms for optimization problems with exclusion constraints[J].Journal of Optimization Theory and Applications,1986,51(3):453-473.
doi: 10.1007/BF00940285 |
| 20 | OKOLOKOI.Consensus-based attitude maneuver of multi-spacecraft with exclusion constraints[M].London:IntechOpen,2018. |
| 21 |
RAKOVICS V,ZHANGS X,HAOY Y,et al.Convex MPC for exclusion constraints[J].Automatica,2021,127,109502.
doi: 10.1016/j.automatica.2021.109502 |
| 22 | SUNH D,ZHANGS X,DAIL,et al.Locally convexified rigid tube MPC[J].IET Control Theory & Applications,2023,17(4):446-462. |
| 23 |
SUNH D,DAIL,WANGP Z.An efficient moving obstacle avoidance scheme for UAVs via output feedback robust MPC[J].IEEE Trans.on Aerospace and Electronic Systems,2024,60(5):6199-6212.
doi: 10.1109/TAES.2024.3401094 |
| 24 |
SUNH D,XIEH H,DAIL,et al.Convex distributed robust model predictive control for collision and obstacle avoidance[J].International Journal of Robust Nonlinear Control,2024,34(12):8334-8354.
doi: 10.1002/rnc.7390 |
| 25 |
XUY C,ZHENGH R,WUW M,et al.Robust hierarchical model predictive control for trajectory tracking with obstacle avoidance[J].IFAC-PapersOnLine,2020,53(2):15745-15750.
doi: 10.1016/j.ifacol.2020.12.056 |
| 26 | ESLAMIAND N, AMIADIFARD R. Moving target tracking and obstacle avoidance for a mobile robot using MPC[C]//Proc. of the 27th Iranian Conference on Electrical Engineering, 2019: 1163-1169. |
| 27 |
BRITOB,FLOORB,FERRANTIL,et al.Model predictive contouring control for collision avoidance in unstructured dynamic environments[J].IEEE Robotics and Automation Letters,2019,4(4):4459-4466.
doi: 10.1109/LRA.2019.2929976 |
| 28 |
TANGY J,CHENL Y,MOUJ M,et al.Robust model predictive control for ship collision avoidance under multiple uncertainties[J].IEEE Trans.on Transportation Electrification,2024,10(4):10374-10387.
doi: 10.1109/TTE.2024.3382032 |
| 29 | FRANCO A, SANTOS V. Short-term path planning with multiple moving obstacle avoidance based on adaptive MPC[C]//Proc. of the IEEE International Conference on Autonomous Robot Systems and Competitions, 2019. |
| 30 |
LIX H,SUNZ P,CAOD P,et al.Development of a new integrated local trajectory planning and tracking control framework for autonomous ground vehicles[J].Mechanical Systems and Signal Processing,2017,87,118-137.
doi: 10.1016/j.ymssp.2015.10.021 |
| 31 |
HANGP,HUANGS N,CHENX B,et al.Path planning of collision avoidance for unmanned ground vehicles: a nonlinear model predictive control approach[J].Proceedings of the Institution of Mechanical Engineers Part Ⅰ-Journal of Systems and Control Engineering,2021,235(2):222-236.
doi: 10.1177/0954411920971398 |
| 32 |
LUQ,ZHANGD,YEW J,et al.Targeting posture control with dynamic obstacle avoidance of constrained uncertain wheeled mobile robots including unknown skidding and slipping[J].IEEE Trans.on Systems Man Cybernetics-Systems,2021,51(11):6650-6659.
doi: 10.1109/TSMC.2019.2962732 |
| 33 |
QIET Q,WANGW D,YANGC,et al.An improved model predictive control-based trajectory planning method for automated driving vehicles under uncertainty environments[J].IEEE Trans.on Intelligent Transportation Systems,2023,24(4):3999-4015.
doi: 10.1109/TITS.2022.3230680 |
| 34 |
WANGL L,XUX Y,HANB,et al.Multiple autonomous underwater vehicle formation obstacle avoidance control using event-triggered model predictive control[J].Journal of Marine Science and Engineering,2023,11(10):2016.
doi: 10.3390/jmse11102016 |
| 35 | 葛甜,岳佳豪.改进人工势场法的避障轨迹规划[J].汽车实用技术,2023,48(23):50-55. |
| GET,YUEJ H.Improved obstacle avoidance trajectory planning by artificial potential field method[J].Automobile Applied Technology,2023,48(23):50-55. | |
| 36 | LIMOND,PEREIRAM,DE LA PENAD,et al.MPC for tracking periodic references[J].IEEE Trans.on Automatic Control,2015,61(4):1123-1128. |
| 37 |
MAYNED Q,SERONM M,RAKOVICS V.Robust model predictive control of constrained linear systems with bounded disturbances[J].Automatica,2005,41(2):219-224.
doi: 10.1016/j.automatica.2004.08.019 |
| 38 | 刘加涛. 智能车辆路径规划与跟踪控制研究[D]. 大连: 大连交通大学, 2023. |
| LIU J T. Research on intelligent vehicle path planning and tracking control[D]. Dalian: Dalian Jiaotong University, 2023. | |
| 39 | ROCKAFELLARR T.Convex analysis[M].Princeton:Princeton University Press,1970. |
| 40 |
RAOC V,RAWLINGSJ B.Steady states and constraints in model predictive control[J].AIChE Journal,1999,45(6):1266-1278.
doi: 10.1002/aic.690450612 |
| 41 | 李胜琴,邢佳祁.基于模型预测和转角补偿的智能汽车换道轨迹跟踪控制算法[J].江苏大学学报(自然科学版),2024,45(3):249-256. |
| LIS Q,XINGJ Q.Trajectory tracking control algorithm of lane changing for intelligent vehicle based on model prediction and angle compensation[J].Journal of Jiangsu University (Natural Science Edition),2024,45(3):249-256. | |
| 42 | 周岩,刘云龙,李擎.轮式移动机器人复合分层抗干扰轨迹跟踪控制[J].北京信息科技大学学报(自然科学版),2024,39(3):1-7. |
| ZHOUY,LIUY L,LIQ.Composite hierarchical anti-disturbance trajectory tracking control of wheeled mobile robot[J].Journal of Beijing Information Science & Technology University (Science and Technology Edition),2024,39(3):1-7. | |
| 43 | 马世典,侯桐,江浩斌,等.自动泊车前轮转角闭环的分层控制方案[J].江苏大学学报(自然科学版),2024,45(4):396-403. |
| MAS D,HOUT,JIANGH B,et al.Closed-loop layered control strategy of front wheel angle for automatic parking system[J].Journal of Jiangsu University (Natural Science Edition),2024,45(4):396-403. | |
| 44 |
RAKOVICS V,KERRIGANE C,KOURAMASK I,et al.Invariant approximations of the minimal robust positively invariant set[J].IEEE Trans.on Automatic Control,2005,50(3):406-410.
doi: 10.1109/TAC.2005.843854 |
| [1] | 赵万兵, 夏元清, 戴荔, 张元. 弱通信下无人潜航器事件触发一致性协同控制[J]. 系统工程与电子技术, 2025, 47(2): 591-599. |
| [2] | 胡子晅, 周佳玲, 王利楠, 孙佳月, 温广辉. 多BTT导弹滚转通道姿态约束下的固定时间姿态协调控制[J]. 系统工程与电子技术, 2024, 46(6): 2065-2072. |
| [3] | 刘正洋, 周丽, 张瑞. 随机参数摄动下的高超声速飞行器姿态控制[J]. 系统工程与电子技术, 2024, 46(2): 703-714. |
| [4] | 王旋, 狄鹏, 尹东亮. 基于Lance距离和信度熵的冲突证据融合方法[J]. 系统工程与电子技术, 2022, 44(2): 592-602. |
| [5] | 刘锦涛, 何明, 罗玲, 柳强, 禹明刚. 无人机集群牵制控制系统特征值分析[J]. 系统工程与电子技术, 2022, 44(2): 612-618. |
| [6] | 方澄, 路稳, 姬菁颖, 宋玉蒙, 梁斐菲, 罗志伟. 基于外观相似性更新的相关滤波跟踪算法[J]. 系统工程与电子技术, 2022, 44(1): 117-126. |
| [7] | 罗哲, 权婉珍, 张朴睿, 杨小冈. 单边Lipschitz非线性多智能体系统一致性追踪控制[J]. 系统工程与电子技术, 2022, 44(1): 279-284. |
| [8] | 方安然, 李旦, 张建秋. 异常值和未知观测噪声鲁棒的卡尔曼滤波器[J]. 系统工程与电子技术, 2021, 43(3): 593-602. |
| [9] | 张果, 李俊民. 离散模糊双线性系统的稳定控制[J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2440-2444. |
| [10] | 林琼斌, 王武, 杨富文, 蔡碧贞. 随机时延非线性系统的模糊耗散滤波[J]. Journal of Systems Engineering and Electronics, 2009, 31(10): 2434-2439. |
| [11] | 马可芸, 俞立, 张文安. 基于H∞控制方法的多链路网络拥塞控制[J]. Journal of Systems Engineering and Electronics, 2009, 31(8): 1930-1934. |
| [12] | 戴建国, 崔宝同. 多输入多输出网络控制系统的绝对稳定性分析[J]. Journal of Systems Engineering and Electronics, 2009, 31(7): 1705-1709. |
| [13] | 傅勤, 王宝华, 杨成梧. 一类大型互联非线性时滞系统的鲁棒控制[J]. Journal of Systems Engineering and Electronics, 2009, 31(7): 1720-1722. |
| [14] | 肖民卿, 彭庆, 曹长修. Delta算子系统的鲁棒D稳定可靠控制[J]. Journal of Systems Engineering and Electronics, 2009, 31(6): 1506-1509. |
| [15] | 闻继伟, 刘飞. 一类模糊跳变系统的采样控制器设计[J]. Journal of Systems Engineering and Electronics, 2009, 31(6): 1415-1419. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||