
系统工程与电子技术 ›› 2025, Vol. 47 ›› Issue (11): 3765-3778.doi: 10.12305/j.issn.1001-506X.2025.11.24
• 制导、导航与控制 • 上一篇
王琛1,2, 朱承1,2,*, 王祥科3, 丁兆云1,2, 张千桢1,2, 张胜1,2, 朱先强1,2
收稿日期:2024-12-05
出版日期:2025-11-25
发布日期:2025-12-08
通讯作者:
朱承
作者简介:王 琛(1998—),男,博士研究生,主要研究方向为智能指挥控制、分布式无人集群Chen WANG1,2, Cheng ZHU1,2,*, Xiangke WANG3, Zhaoyun DING1,2, Qianzhen ZHANG1,2, Sheng ZHANG1,2, Xianqiang ZHU1,2
Received:2024-12-05
Online:2025-11-25
Published:2025-12-08
Contact:
Cheng ZHU
摘要:
基于无人机分布式集群反制多个动态无人机的任务场景,提出通过基因调控网络和行为设计结合的方法实现无人机集群速度控制。无人机通过基因调控网络模型基于目标位置信息和威胁区位置信息计算适应当前环境的群体形态;考虑无人机在反制目标任务的各项子行为,设计反制任务场景中的无人机分布式集群运动速度控制器,无人机可在群体层面涌现出自适应兵力分配集群反制目标的队形。提出关于任务完成效果与集群运动性能的若干统计指标,并通过仿真对比实验进行了指标分析。指标统计结果显示本文所提方法可以很好地实现无人机分布式集群反制多个动态目标的任务。
中图分类号:
王琛, 朱承, 王祥科, 丁兆云, 张千桢, 张胜, 朱先强. 无人机分布式集群反制动态多目标运动控制技术[J]. 系统工程与电子技术, 2025, 47(11): 3765-3778.
Chen WANG, Cheng ZHU, Xiangke WANG, Zhaoyun DING, Qianzhen ZHANG, Sheng ZHANG, Xianqiang ZHU. Technology for countering dynamic multi-target motion control using distributed drone swarm systems[J]. Systems Engineering and Electronics, 2025, 47(11): 3765-3778.
图1
无人机分布式集群运动控制技术框架"

图2
GRN浓度映射曲线"

图3
GRN映射的环境信息浓度地图"
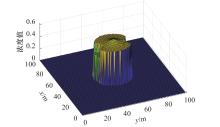
图4
GRN映射的环境局部信息浓度地图"
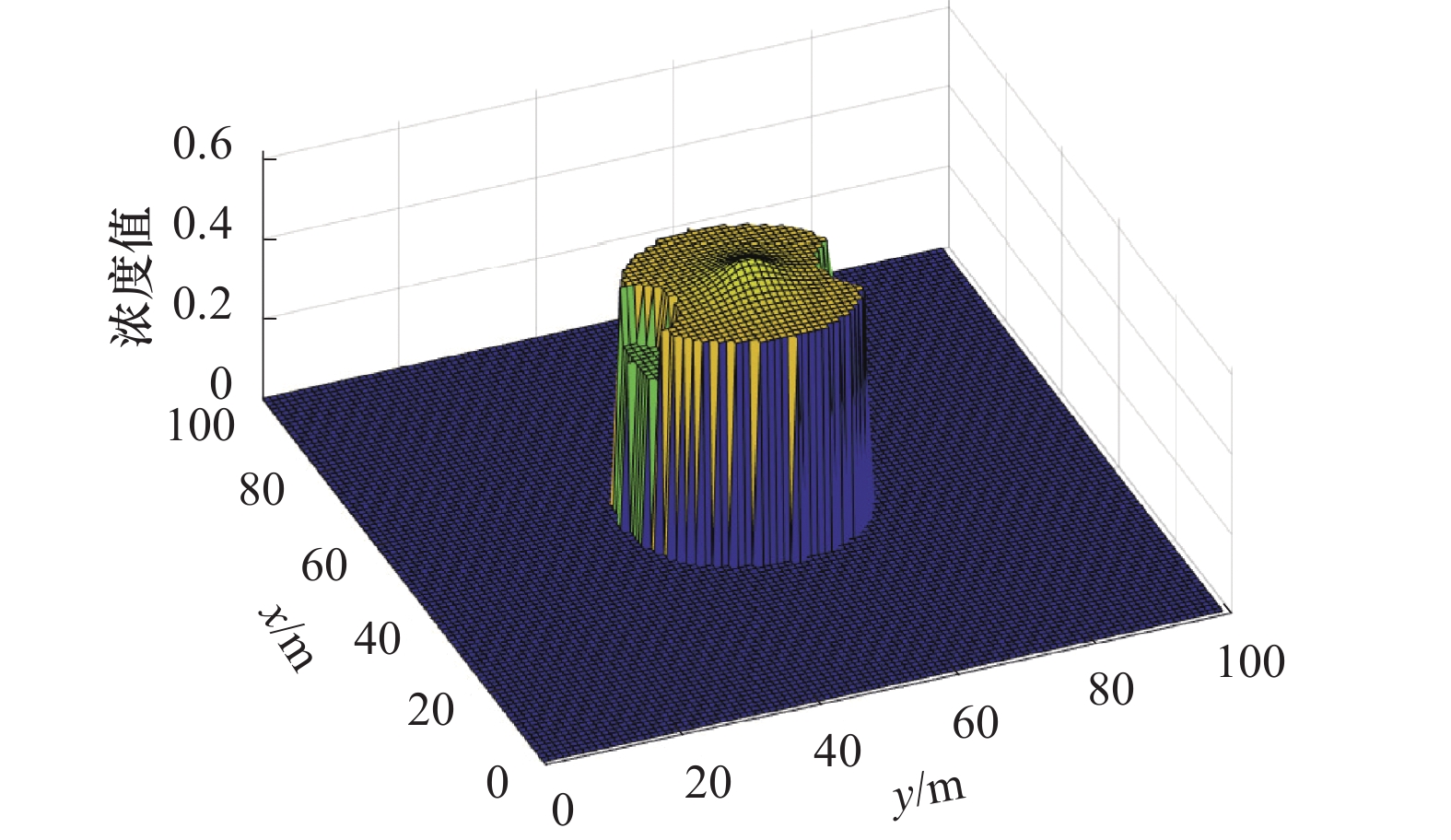
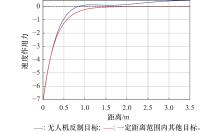
图5
无人机对所反制目标及非反制目标的速度作用力随距离变化的曲线"
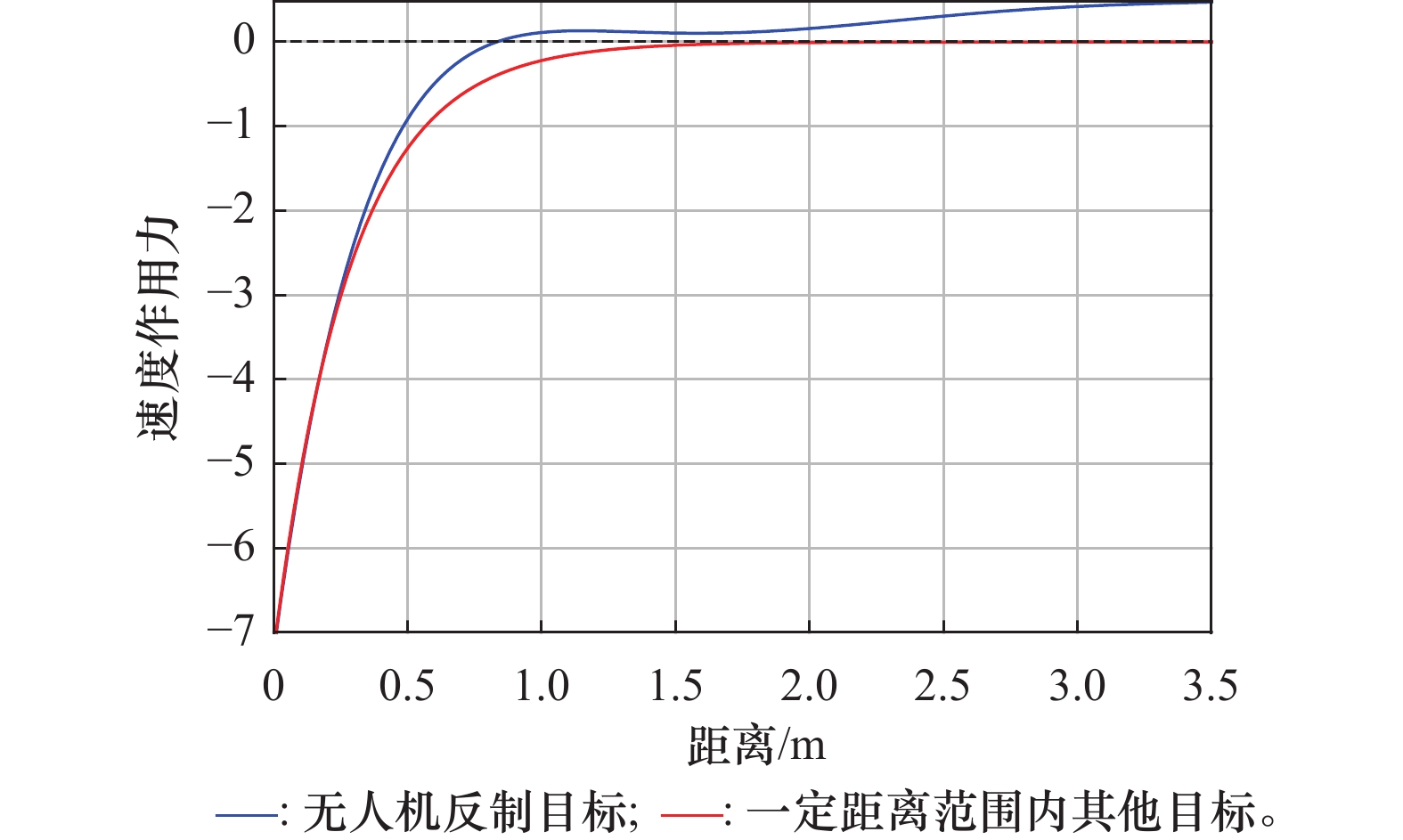

图6
12架无人机在静态威胁区场景分布式集群运动反制1个目标的示意图"
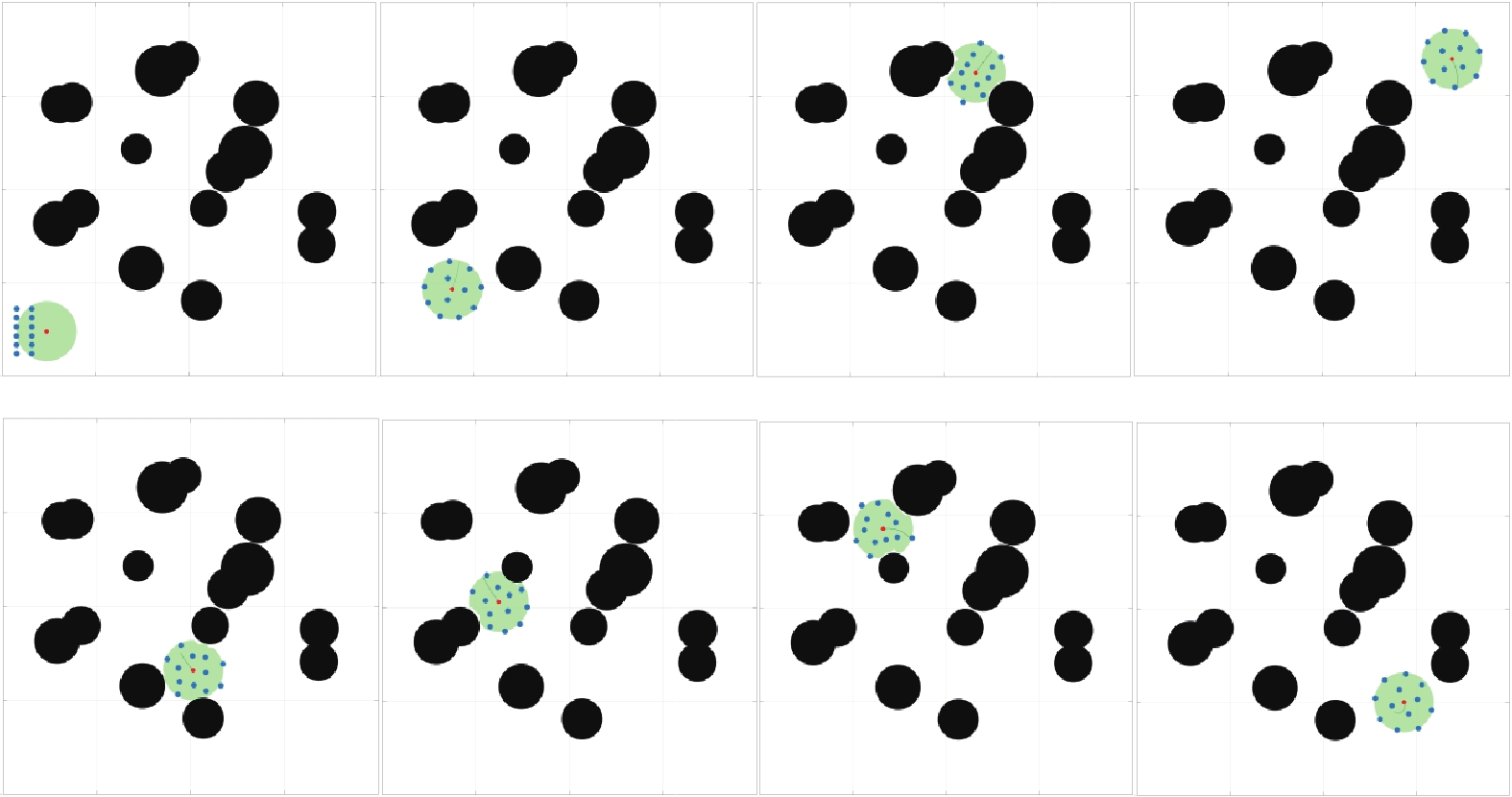

图7
16架无人机在静态威胁区场景分布式集群运动反制1个目标的示意图"
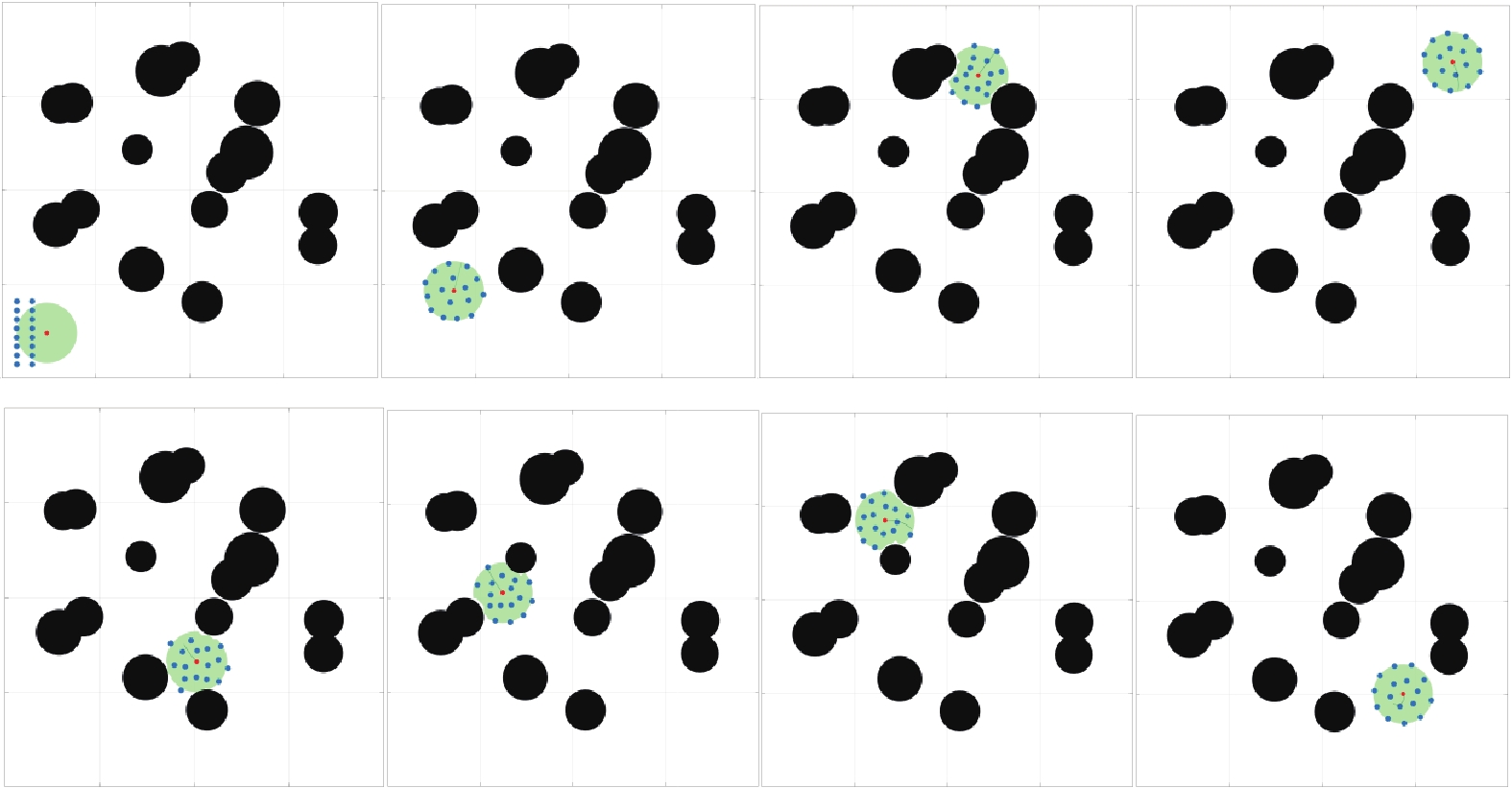

图8
20架无人机在静态威胁区场景分布式集群运动反制1个目标的示意图"
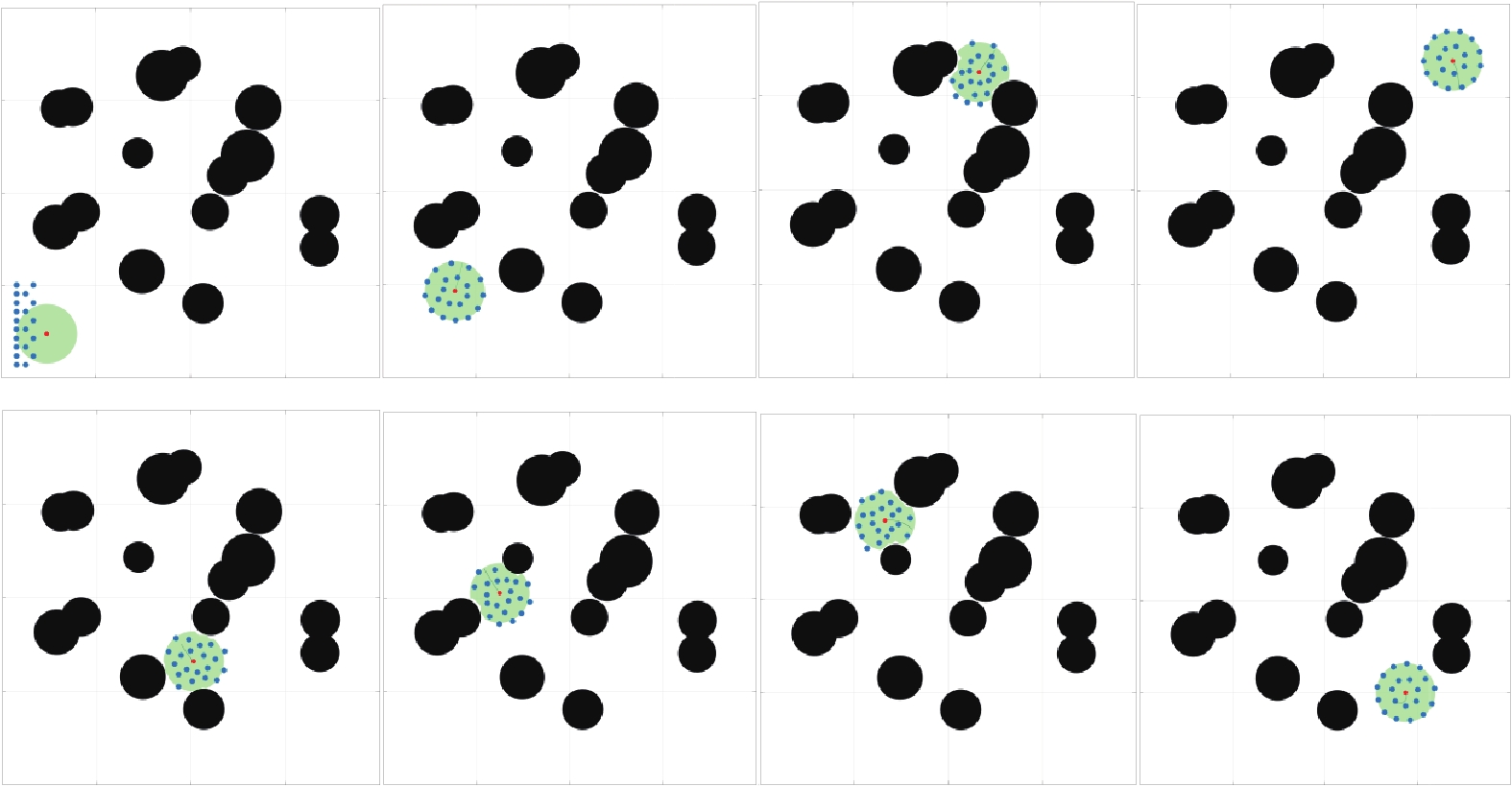

图9
20架无人机在动态威胁区场景分布式集群运动反制2个目标的示意图(GRN方法)"
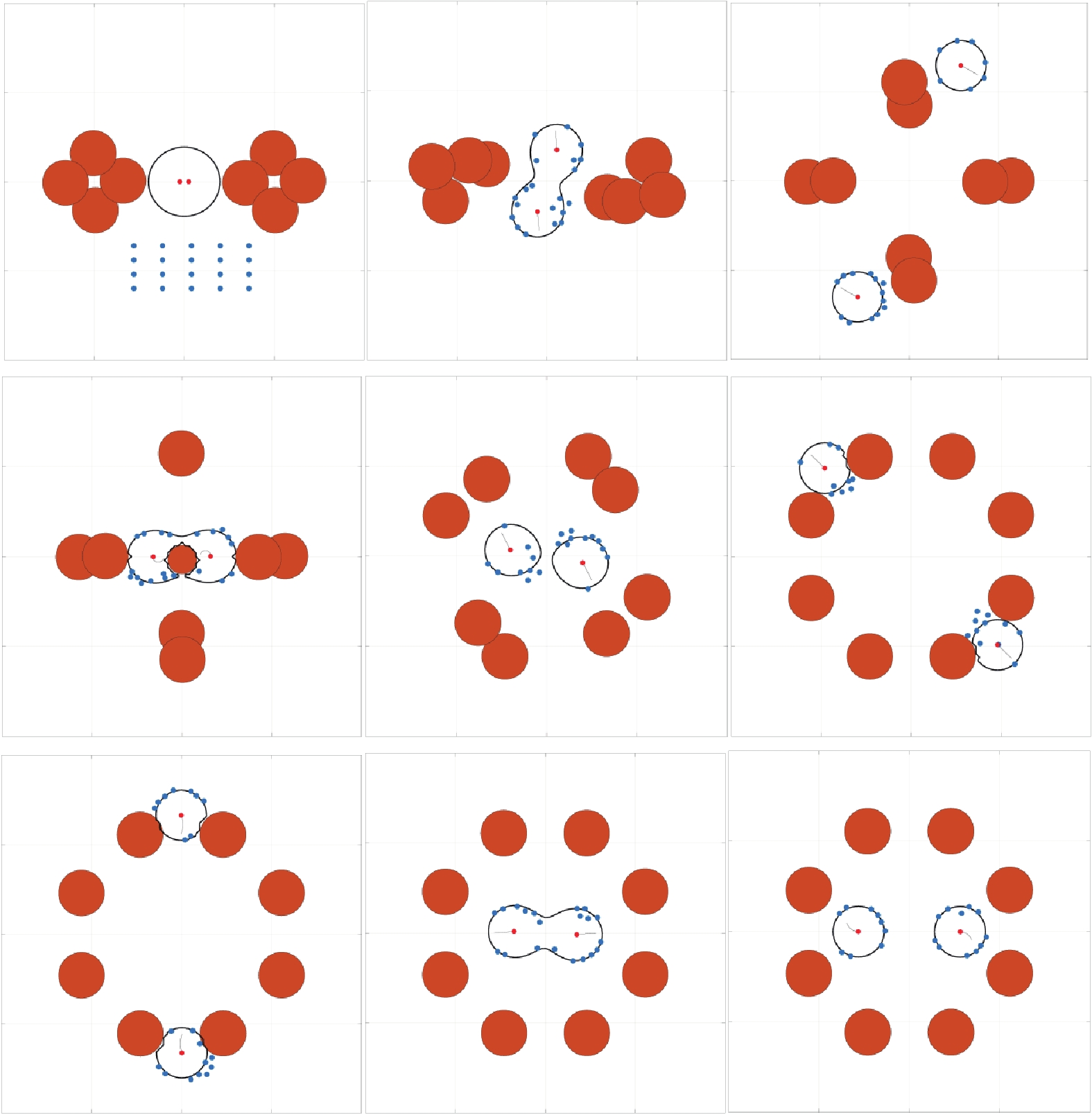
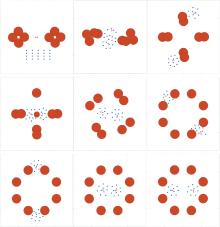
图10
20架无人机在动态威胁区场景分布式集群运动反制2个目标的示意图(AGENT方法)"
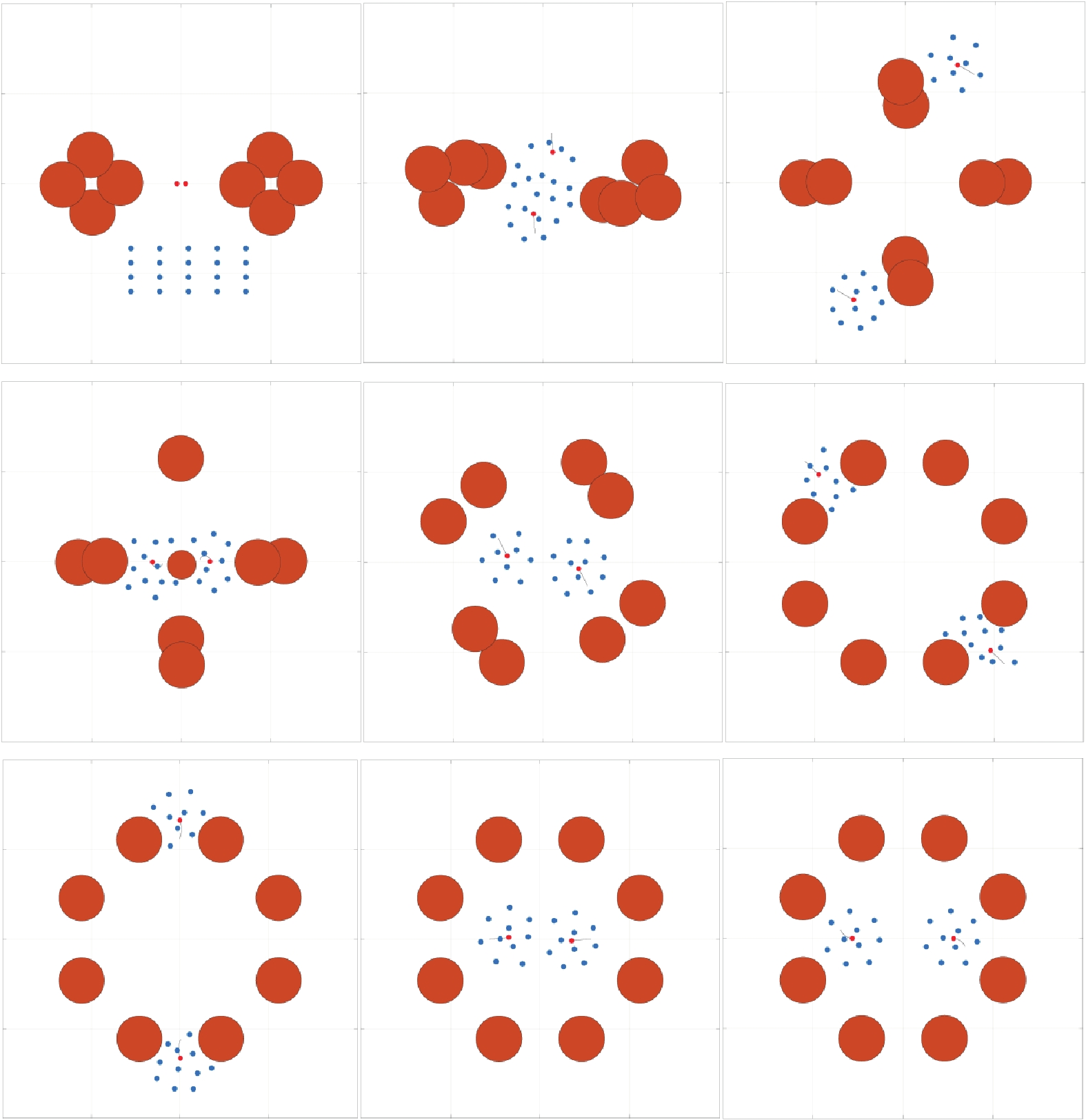

图11
20架无人机在动态威胁区场景分布式集群运动反制2个目标的示意图(TACTICS方法)"
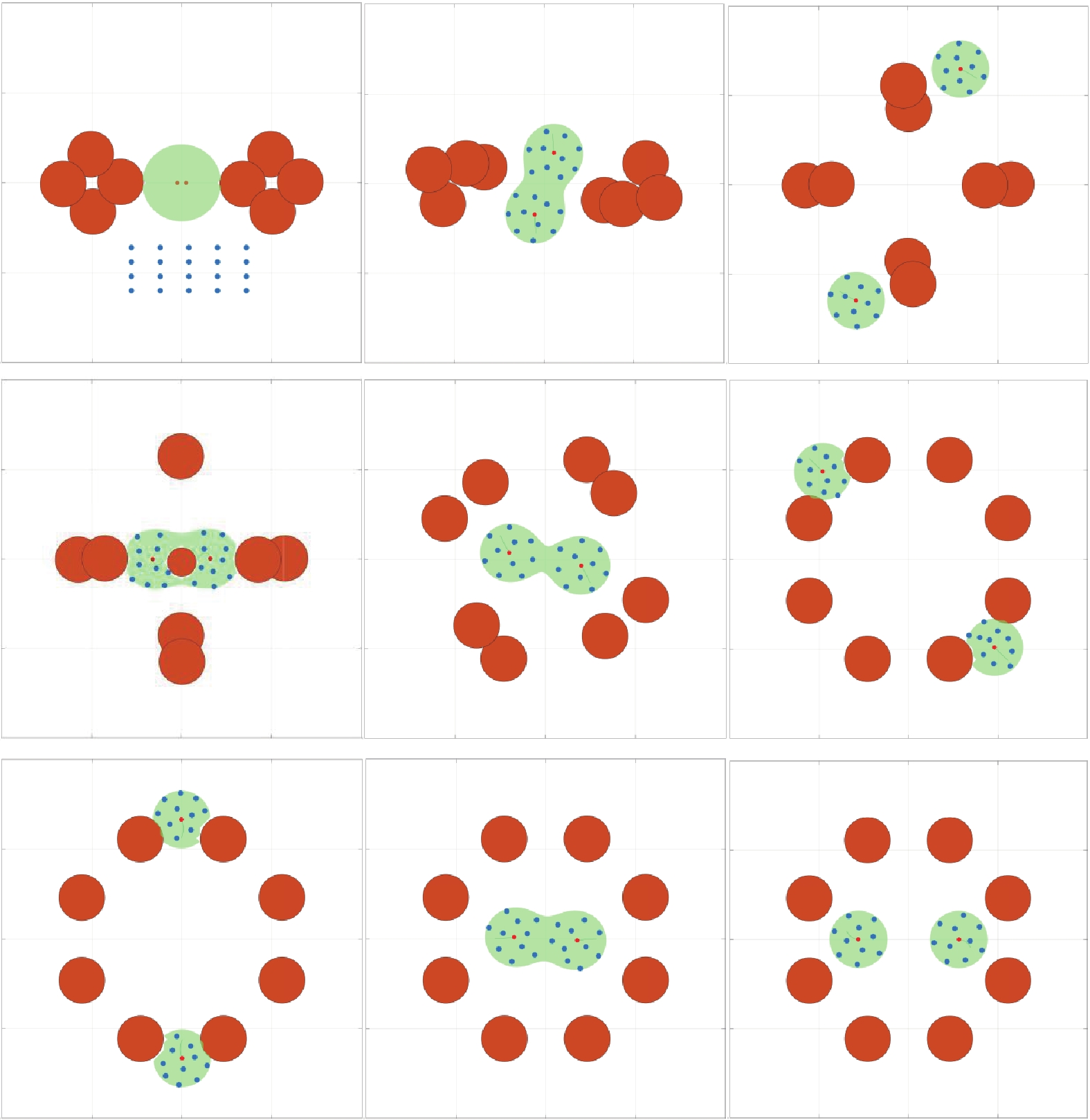

图12
20架无人机反制2个目标涌现出的兵力分布效果"
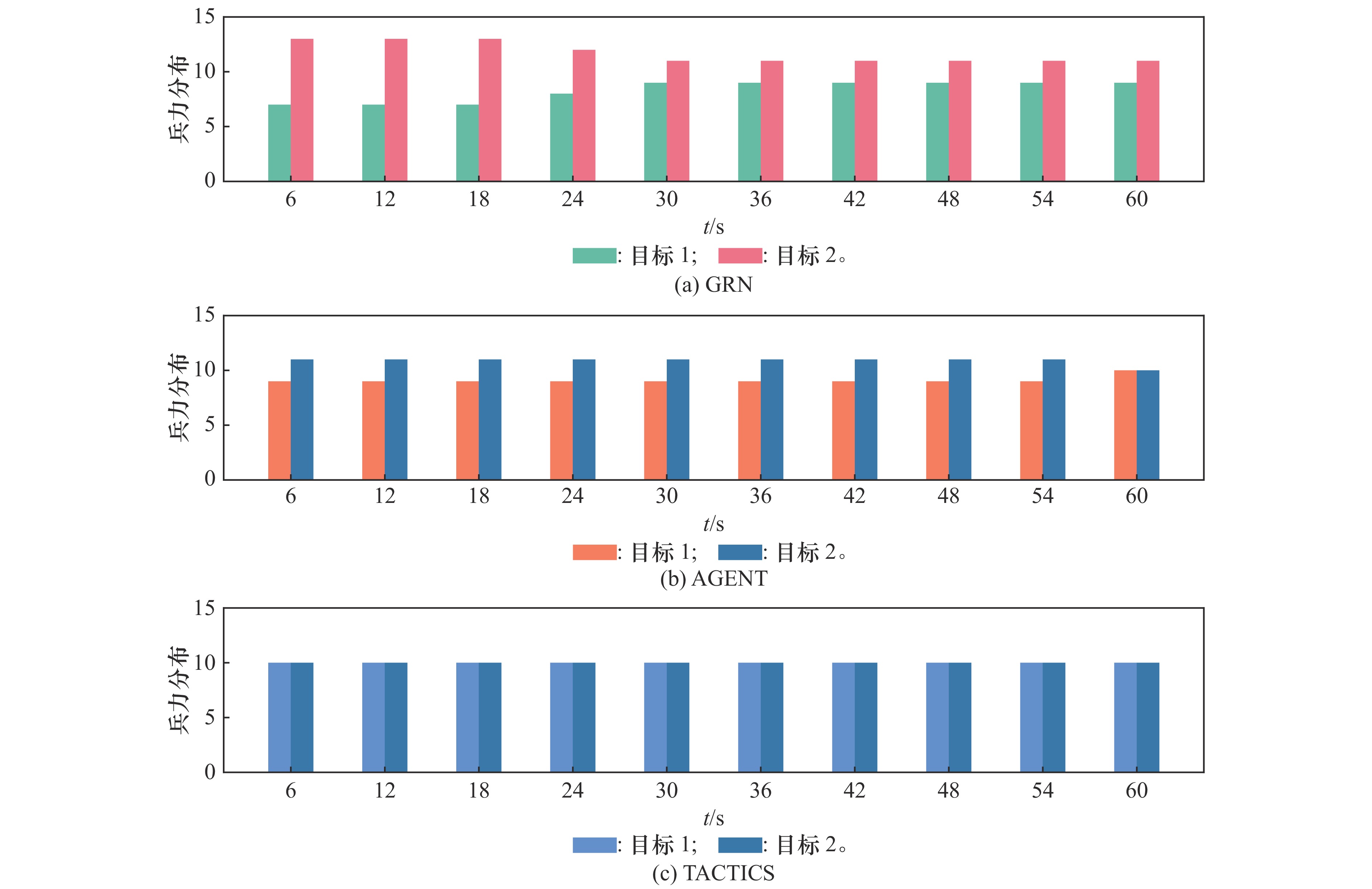
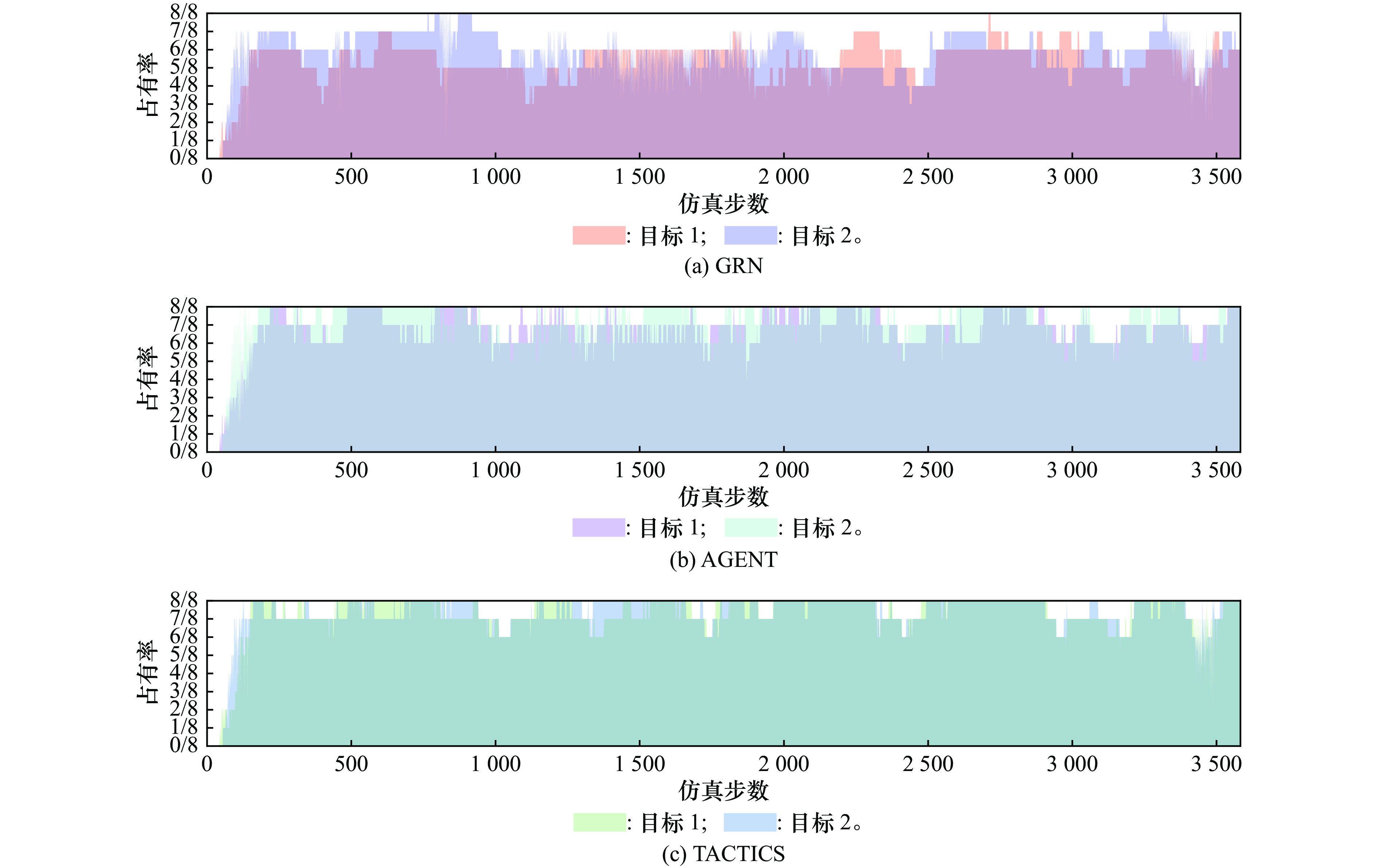
图13
20架无人机反制2个目标涌现出的目标包围圈占有率"
图14
反制2个目标的2个无人机群中无人机之间最小距离的平均值减去最小距离和所有无人机之间的最小距离"
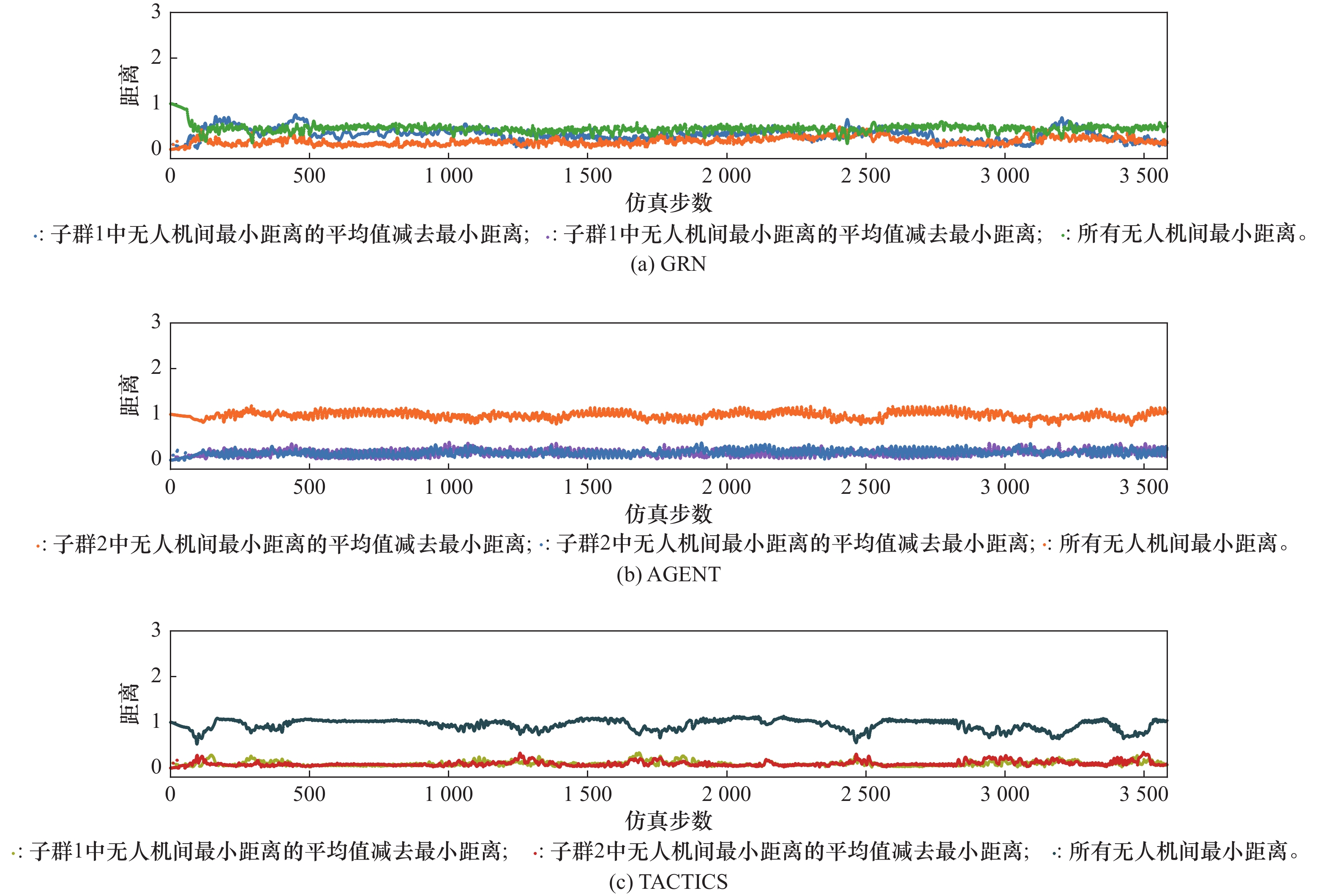

图15
无人机到各自目标的距离的平均值和所有无人机离2个目标的最小距离"
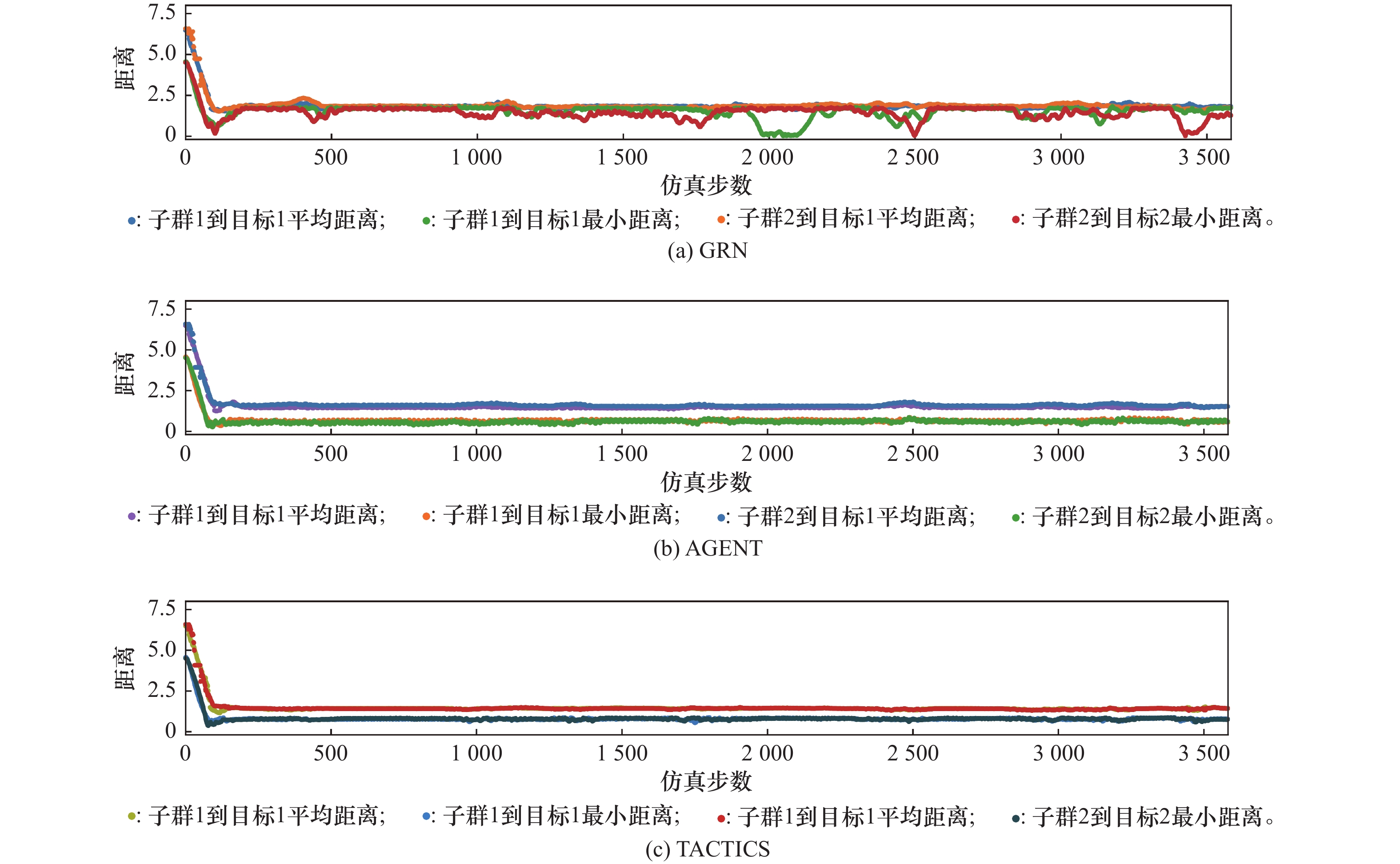

图16
各无人机分别离2个目标的距离及无人机做的反制目标选择"
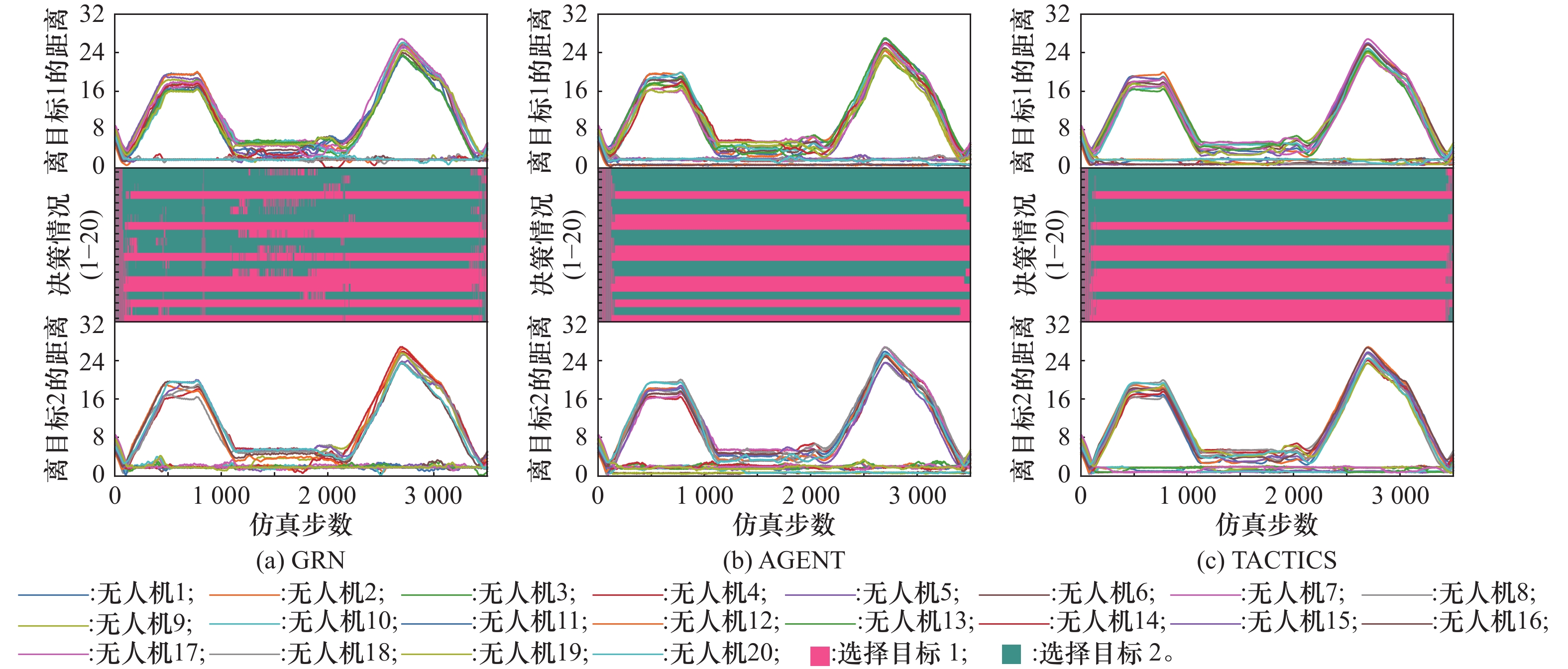
图17
追踪反制2个目标的2个子无人机群中,无人机与其所属子群的速度相关性"
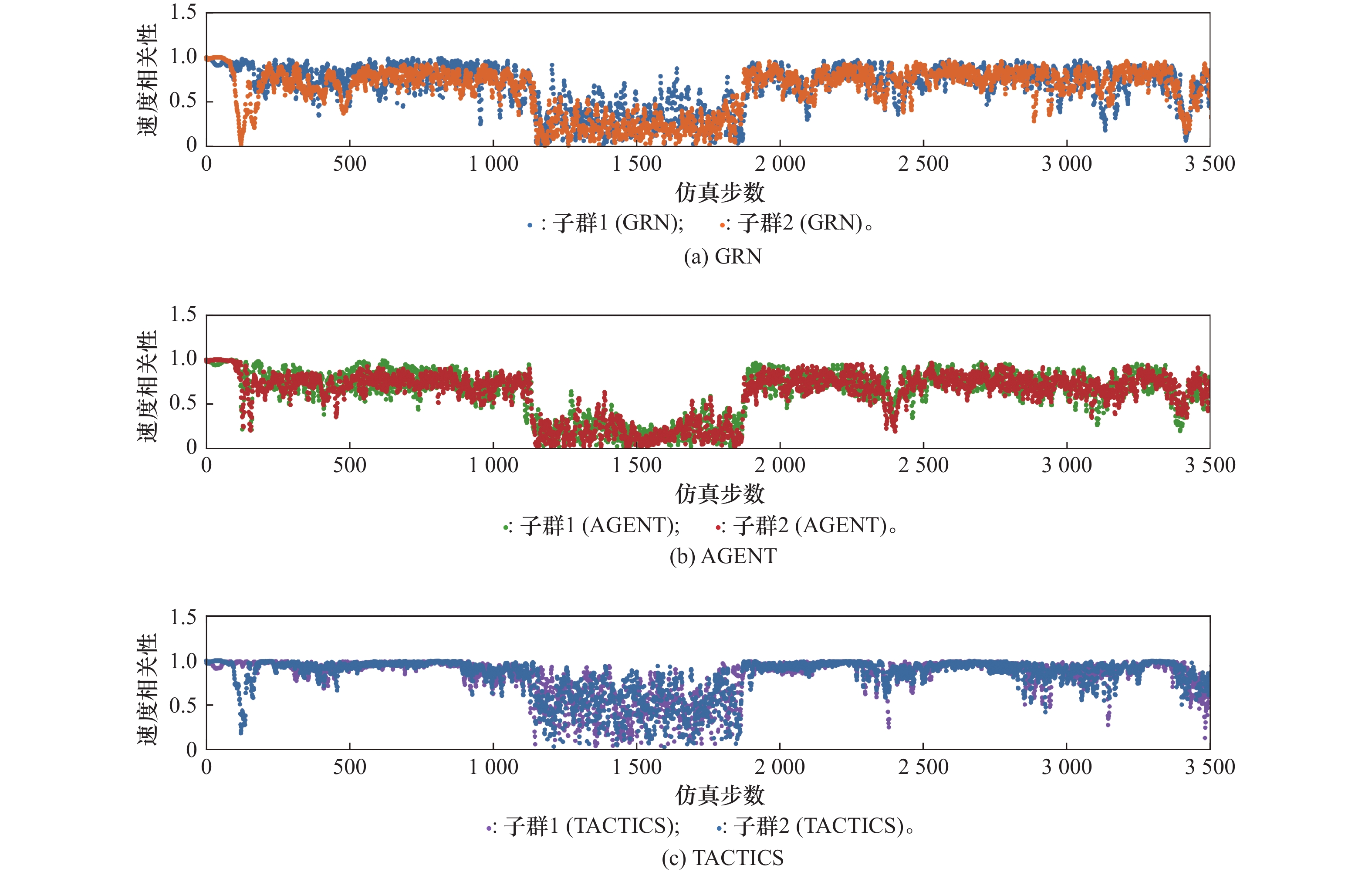
图18
所有无人机到威胁区最小距离的平均值以及所有无人机到威胁区最小距离的最小值"
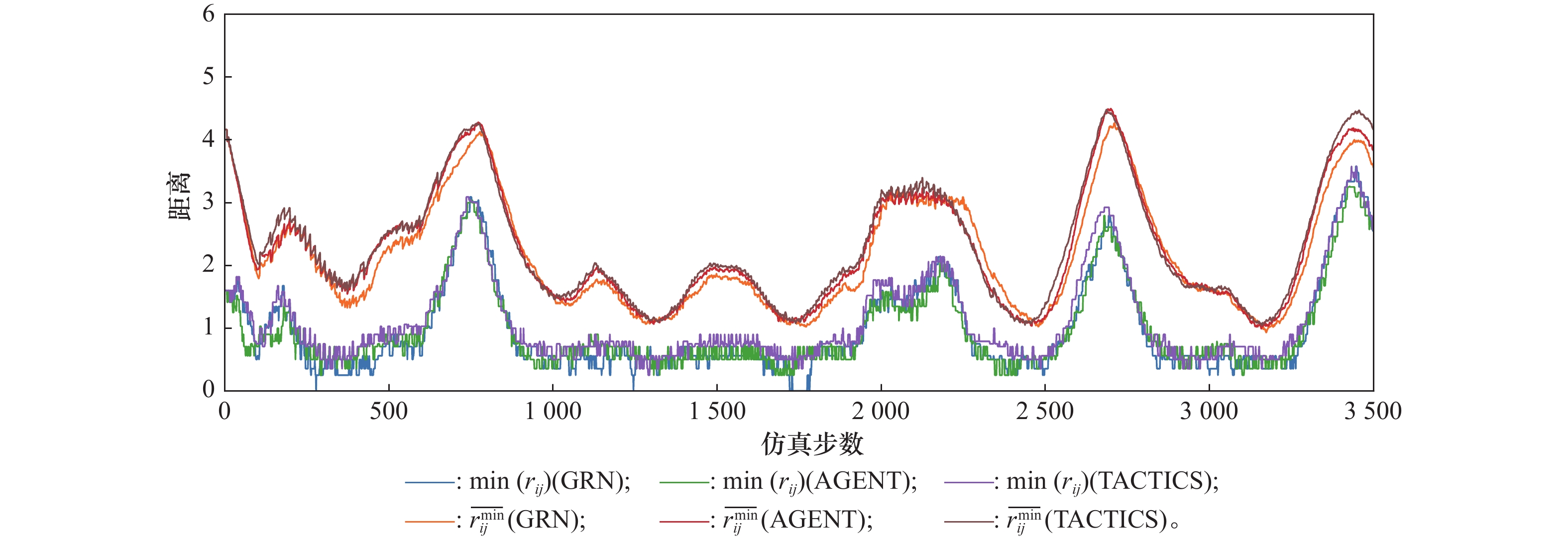
图19
20架无人机相邻时刻速度相关性"
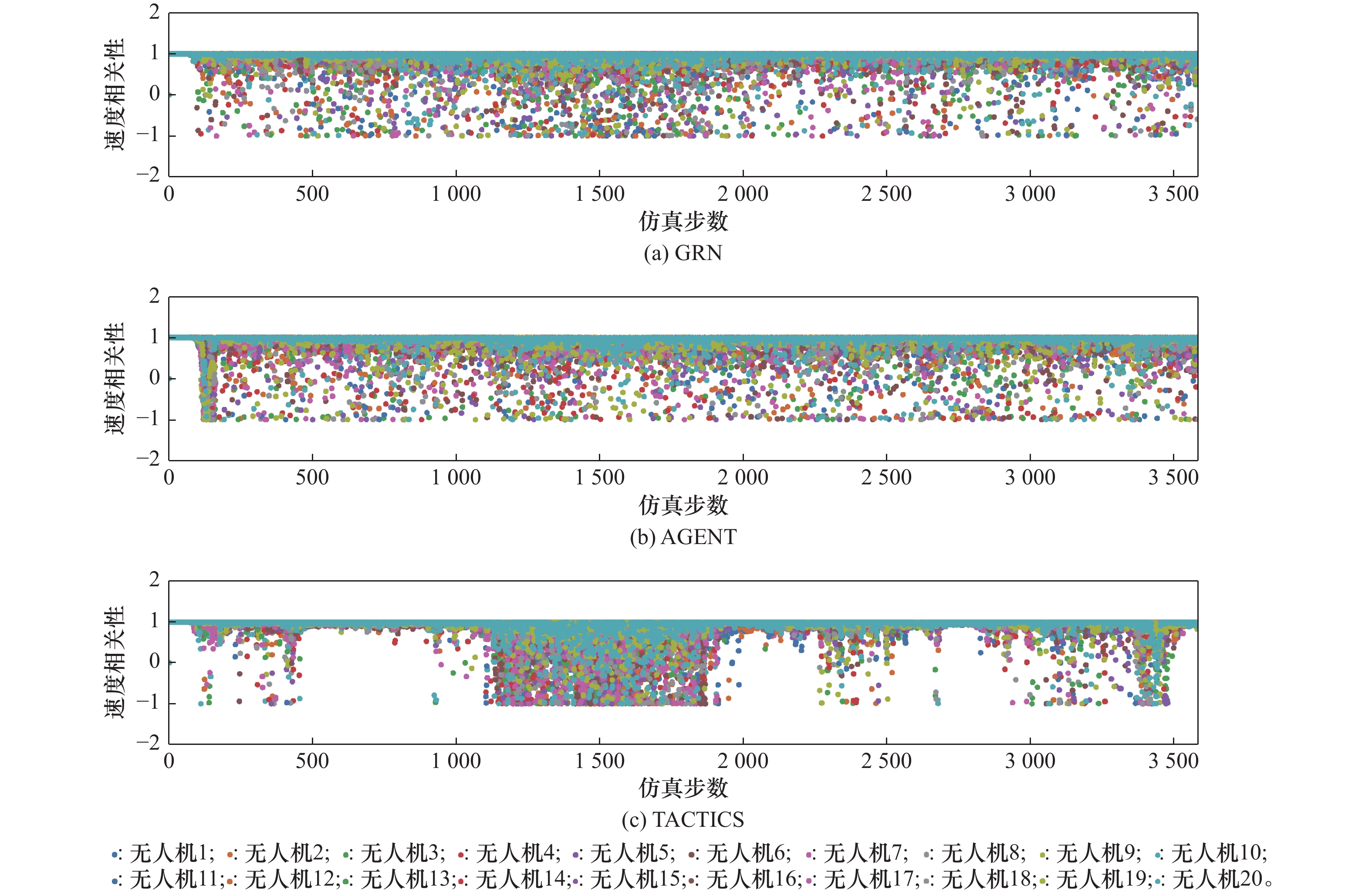
表1
算法运行时间比较"
| 指标 | GRN方法 | AGENT方法 | TACTICS方法 |
| 指标1 | × | — | √ |
| 指标2 | × | — | √ |
| 指标3 | × | √ | √ |
| 指标4 | × | √ | √ |
| 指标5 | × | — | √ |
| 指标6 | — | — | √ |
| 指标7 | × | — | √ |
| 指标8 | — | — | √ |
| 1 | KREPS S, LUSHENKO P. Drones in modern war: evolutionary, revolutionary, or both?[J]. Defense & Security Analysis, 2023, 39 (2): 271- 274. |
| 2 | PARK S H, NAMGUNG S P, KIM S K. A case study on the drone battle between Azerbaijan and Armenia[J]. International Journal of Advanced Culture Technology, 2023, 11 (3): 94- 98. |
| 3 | BURSUC A, MUNTEANU C, RUS S. Overview on sea drones evolution and their use in modern warfare[J]. Revista Academiei Fortelor Terestre, 2024, 29 (2): 195- 209. |
| 4 |
GONZALEZ R J. Death by remote control: drone warfare in Afghanistan, Ukraine and beyond[J]. Anthropology Today, 2024, 40 (1): 7- 11.
doi: 10.1111/1467-8322.12862 |
| 5 | CHAN P S. Drones for saving life: reimagining war technology[J]. Circulation: Cardiovascular Quality and Outcomes, 2024, 17 (4): e010908. |
| 6 | MAITRA S. How drones are changing war: cheaper technology means a return to offense dominance, which makes the whole world more volatile[J]. The American Conservative, 2024, 23 (1): 34- 39. |
| 7 | KUNERTOVA D. Learning from the Ukrainian battlefield: tomorrow’s drone warfare, today’s innovation challenge [EB/OL]. [2024-11-30]. http://dx.doi.org/10.3929/ethz-b-000690448. |
| 8 |
DEHEGANI A, MAIZI L. The impact of the digital military revolution on modern warfare: Russia’s war on Ukraine as a model[J]. Journal of Science and Knowledge Horizons, 2024, 4 (1): 280- 299.
doi: 10.34118/jskp.v4i01.3866 |
| 9 |
FAN Y, CHEN B, ZHAO Y, et al. Performance analysis of reconnaissance coverage for HUAV swarms under communication interference based on different architectures[J]. Electronics, 2024, 13 (20): 4067.
doi: 10.3390/electronics13204067 |
| 10 | GRIGORE L, CRISTESCU C. The use of drones in tactical military operations in the integrated and cybernetic battle field[J]. Land Forces Academy Review, 2024, 29 (2): 269−273. |
| 11 | KANU N J, GUPTA E, PENDKAR S M, et al. A few suggestions to improve anti-drone measures for combating against the drone menace[J]. Journal of The Institution of Engineers (India): Series C, 2024, 105 (3): 761- 787. |
| 12 | KIM J, CHOI J, KWON H. A study on the development directions of a smart counter-drone defense system based on the future technological environment[J]. KSII Transactions on Internet and Information Systems (TIIS), 2024, 18 (7): 1929- 1952. |
| 13 | LEE N I. A study on influencing factors to build a counter-drone system: focusing on national important facilities[J]. The Journal of the Convergence on Culture Technology, 2024, 10 (4): 483- 494. |
| 14 | CHO S K, JANG S, KIM S. A study on how to establish the counter-drone system for National crucial infrastructures[J]. International Journal of Advanced Culture Technology, 2024, 12 (4): 275- 284. |
| 15 |
KASHI R N, PRASHANTH A, KASHI S R, et al. A survey and analysis of drone detection systems using a systems approach superposed on scenarios[J]. Systems Engineering, 2024, 27 (3): 598- 636.
doi: 10.1002/sys.21735 |
| 16 | CHOI H, JOUNG K W. A study on the establishment of counter-drone system and the concept of integrated multi-domain defense[J]. International Journal of Advanced Culture Technology, 2024, 12 (4): 323- 334. |
| 17 |
KING A. Robot wars: autonomous drone swarms and the battlefield of the future[J]. Journal of Strategic Studies, 2024, 47 (2): 185- 213.
doi: 10.1080/01402390.2024.2302585 |
| 18 |
BU Y J, YAN Y, YANG Y N. Advancement challenges in UAV swarm formation control: a comprehensive review[J]. Drones, 2024, 8 (7): 320.
doi: 10.3390/drones8070320 |
| 19 |
HENG L W, ZHENG X, HONG D Z. Dynamic collision avoidance for cooperative fixed-wing UAV swarm based on normalized artificial potential field optimization[J]. Journal of Central South University, 2021, 28 (10): 3159- 3172.
doi: 10.1007/s11771-021-4840-5 |
| 20 |
WANG C, WANG D L, GU M Q, et al. Bioinspired environment exploration algorithm in swarm based on levy flight and improved artificial potential field[J]. Drones, 2022, 6 (5): 122.
doi: 10.3390/drones6050122 |
| 21 |
WANG X K, YU Y G, LI Z K. Distributed sliding mode control for leader-follower formation flight of fixed-wing unmanned aerial vehicles subject to velocity constraints[J]. International Journal of Robust and Nonlinear Control, 2021, 31 (6): 2110- 2125.
doi: 10.1002/rnc.5030 |
| 22 | BACHETI V P, BRANDÃO A S, SARCINELLI-FILHO M. Path-following with a UGV-UAV formation considering that the UAV lands on the UGV [C]//Proc. of the IEEE International Conference on Unmanned Aircraft Systems, 2020: 488−497. |
| 23 |
XUE K, WU T Y. Distributed consensus of USVs under heterogeneous UAV-USV multi-agent systems cooperative control scheme[J]. Journal of Marine Science and Engineering, 2021, 9 (11): 1314.
doi: 10.3390/jmse9111314 |
| 24 | LOWE R, WU Y I, TAMAR A, et al. Multi-agent actor-critic for mixed cooperative-competitive environments [C]// Proc. of the 31st International Conference on Neural Information Processing Systems, 2017: 6382−6393. |
| 25 |
ERGUN S. Resource allocation optimization for effective vehicle network communications using multi-agent deep reinforcement learning[J]. Journal of Dynamics and Games, 2025, 12 (2): 134- 156.
doi: 10.3934/jdg.2024017 |
| 26 | LIU B, LI X, ZHENG T C, et al. Research on multi UAV attack defense confrontation algorithm based on machine learning[J]. Academic Journal of Computing & Information Science, 2021, 4 (3): 52- 59. |
| 27 |
ZHOU X, WEN X Y, WANG Z P, et al. Swarm of micro flying robots in the wild[J]. Science Robotics, 2022, 7 (66): eabm5954.
doi: 10.1126/scirobotics.abm5954 |
| 28 |
JIN Y C, GUO H L, MENG Y. A hierarchical gene regulatory network for adaptive multirobot pattern formation[J]. IEEE Trans. on Systems, Man, and Cybernetics, Part B (Cybernetics), 2012, 42 (3): 805- 816.
doi: 10.1109/TSMCB.2011.2178021 |
| 29 |
WANG C, KUANG W X, GU M Q, et al. AGENT: an adaptive grouping and entrapping method for flocking systems[J]. Journal of Computational Design and Engineering, 2023, 10 (1): 357- 367.
doi: 10.1093/jcde/qwac136 |
| 30 | OH H, JIN Y C. Evolving hierarchical gene regulatory networks for morphogenetic pattern formation of swarm robots [C]//Proc. of the IEEE Congress on Evolutionary Computation, 2014: 776−783. |
| 31 |
VASARHELYI G, VIRAGH C, SOMORJAI G, et al. Optimized flocking of autonomous drones in confined environments[J]. Science Robotics, 2018, 3 (20): eaat3536.
doi: 10.1126/scirobotics.aat3536 |
| 32 |
SUN G B, ZHOU R, MA Z, et al. Mean-shift exploration in shape assembly of robot swarms[J]. Nature Communications, 2023, 14 (1): 3476.
doi: 10.1038/s41467-023-39251-5 |
| 33 | 王琛. 12架无人机穿越静态威胁区执行1个目标的反制任务[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1ujsSekENd. |
| WANG C. Twelve drones are conducting distributed swarm movements in a static threat area to counter a single target. [EB/OL]. [2024-11-30]. https://www.bilibili.com/video/ BV1ujsSekENd. | |
| 34 | 王琛. 16架无人机穿越静态威胁区执行1个目标的反制任务[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1ujsSekEYm. |
| WANG C. Sixteen drones are conducting distributed swarm movements in a static threat area to counter a single target. [EB/OL]. [2024-11-30]. https://www.bilibili.com/video/ BV1ujsSekEYm. | |
| 35 | 王琛. 20架无人机穿越静态威胁区执行1个目标的反制任务[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1MjsSekE6T. |
| WANG C. Twenty drones are conducting distributed swarm movements in a static threat area to counter a single target. [EB/OL]. [2024-11-30]. https://www.bilibili.com/video/ BV1MjsSekE6T. | |
| 36 | 王琛. 20架无人机穿越动态威胁区分布式决策选择目标执行2个目标的反制任务(GRN方法)[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1MjsSekE6w. |
| WANG C. Twenty drones are conducting distributed swarm movements in a dynamic threat area to counter two targets (GRN method). [EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1MjsSekE6w. | |
| 37 | 王琛. 20架无人机穿越动态威胁区分布式决策选择目标执行2个目标的反制任务(AGENT方法)[EB/OL]. [2024-11-30]. https:// www.bilibili.com/video/BV1NssSeTEEX. |
| WANG C. Twenty drones are conducting distributed swarm movements in a dynamic threat area to counter two targets (AGENT method). [EB/OL]. [2024-11-30]. https://www. bilibili.com/video/BV1NssSeTEEX. | |
| 38 | 王琛. 20架无人机穿越动态威胁区分布式决策选择目标执行2个目标的反制任务(TACTICS方法)[EB/OL]. [2024-11-30]. https://www.bilibili.com/video/BV1MjsSekE4N. |
| WANG C. Twenty drones are conducting distributed swarm movements in a dynamic threat area to counter two targets (TACTICS method)[EB/OL]. [2024-11-30]. https://www. bilibili.com/video/BV1MjsSekE4N. |
| [1] | 闻雯, 时晨光, 周建江. 多元威胁环境下无人机集群隐身航迹规划算法[J]. 系统工程与电子技术, 2025, 47(9): 2971-2984. |
| [2] | 郭方杰, 李靖, 张朝辉. 具有输入时滞的MAS预设时间滞后一致性[J]. 系统工程与电子技术, 2025, 47(9): 3041-3046. |
| [3] | 王子怡, 傅雄军, 董健, 冯程. 基于分层多智能体强化学习的雷达协同抗干扰策略优化[J]. 系统工程与电子技术, 2025, 47(4): 1108-1114. |
| [4] | 耿泽, 黄炎焱, 张寒. 基于火炮转移路径预测的无人机集群反炮兵搜索路径规划[J]. 系统工程与电子技术, 2025, 47(4): 1222-1234. |
| [5] | 李嘉乐, 钟绮霖, 肖杰, 李国飞. 多智能体系统自适应固定时间编队控制[J]. 系统工程与电子技术, 2025, 47(2): 600-607. |
| [6] | 张佳龙, 赵迪, 张普, 叶磊. 通讯受限下无人机集群自适应追踪控制[J]. 系统工程与电子技术, 2025, 47(10): 3401-3410. |
| [7] | 刘伟民, 王永越, 马欣阳, 刘金琨. 输入时滞多智能体系统的输入受限一致性控制[J]. 系统工程与电子技术, 2024, 46(9): 3176-3184. |
| [8] | 张杰, 刘开蓉, 陈金宝, 张迎雪, 陈传志, 余虹志, 张云啸. 基于空间对抗的多智能体编队控制方法[J]. 系统工程与电子技术, 2024, 46(6): 2082-2091. |
| [9] | 毕文豪, 张梦琦, 高飞, 杨咪, 张安. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3): 922-934. |
| [10] | 刘涛, 王沙沙, 张驰, 白光晗, 陶俊勇. 考虑韧性的无人机集群自组织区域覆盖方法[J]. 系统工程与电子技术, 2024, 46(3): 942-952. |
| [11] | 高程, 都延丽, 步雨浓, 刘燕斌, 王宇飞. 面向复杂多任务的异构无人机集群分组调配[J]. 系统工程与电子技术, 2024, 46(3): 972-981. |
| [12] | 孙谷昊, 蔡中泽, 曾庆双. 多智能体编队加权中心点固定时间分布式跟踪控制[J]. 系统工程与电子技术, 2024, 46(12): 4165-4172. |
| [13] | 殷雅萱, 张安, 毕文豪, 杨盼, 黄湛钧. 动态拓扑下四旋翼无人机集群蜂拥控制[J]. 系统工程与电子技术, 2024, 46(10): 3473-3483. |
| [14] | 刘兴宇, 蒋志彪, 蒋天瑞, 郭荣化, 常远, 闫超, 周晗. 基于通信功率自适应的无人机集群协同导航控制方法[J]. 系统工程与电子技术, 2024, 46(10): 3536-3546. |
| [15] | 薛锡瑞, 黄树彩, 韦道知, 吴建峰. 基于EMD-DESN的无人机集群航迹目的地预测[J]. 系统工程与电子技术, 2024, 46(1): 290-299. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||