Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (4): 1412-1421.doi: 10.12305/j.issn.1001-506X.2024.04.30
• Guidance, Navigation and Control • Previous Articles Next Articles
Research on roll control technology of trajectory correction fuse with active-canards
Qiushi ZHENG1,*, Weichun XU2, Minghan ZHAO1, Naixing LI1, Xuxin BAO1
- 1. Shanghai Radio Equipment Research Institute, Shanghai 201109, China
2. Shanghai Academy of Spaceflight Technology, Shanghai 201109, China
-
Received:2023-05-11Online:2024-03-25Published:2024-03-25 -
Contact:Qiushi ZHENG
CLC Number:
Cite this article
Qiushi ZHENG, Weichun XU, Minghan ZHAO, Naixing LI, Xuxin BAO. Research on roll control technology of trajectory correction fuse with active-canards[J]. Systems Engineering and Electronics, 2024, 46(4): 1412-1421.
share this article

Fig.1
Schematic diagram of the trajectory correction fuse with active-canards"


Fig.2
Moments analysis of the correction fuse"
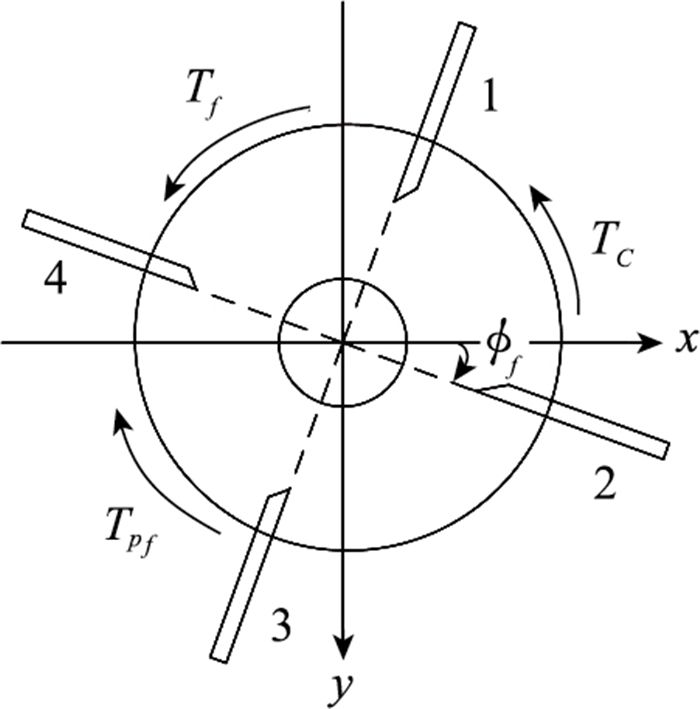

Fig.3
Block diagram of the roll channel model"

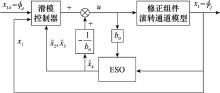
Fig.4
Block diagram of roll channel control system for correction fuse"


Fig.5
Flight speed curce"


Fig.6
Spin rate curve of the correction fuse"

Table 1
Physical parameters"
| 参数 | 取值 |
| 参考面积S/m2 | 0.018 87 |
| 参考长度L/m | 0.155 |
| 组件滚转惯量Ixf/(kg·m2) | 0.012 |
| 舵机时间常数TS | 0.008 3 |
Table 2
Aerodynamic parameters"
| 参数 | 飞行马赫数 | ||||
| 0.6 | 0.9 | 1.1 | 1.5 | 2.0 | |
| Clpf | -0.605 0 | -1.409 0 | -1.421 0 | -0.558 0 | 0.373 0 |
| CMδx | -0.001 6 | -0.003 8 | -0.004 2 | -0.001 5 | -0.001 0 |

Fig.7
Aerodynamic parameter curves"
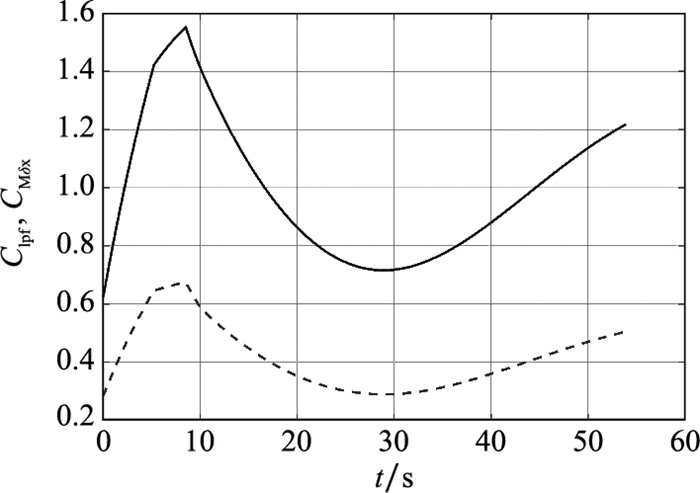

Fig.8
Curves of roll angle command, tracking, and observed value"


Fig.9
System state curves of x2"
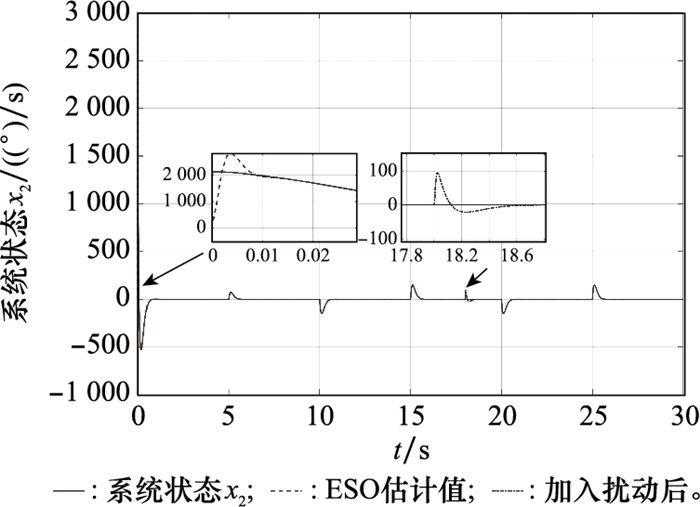
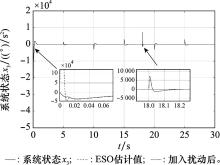
Fig.10
System state curves of x3"
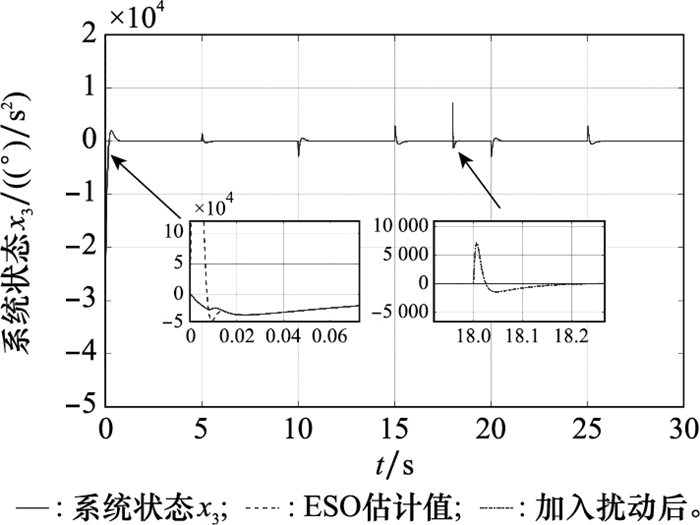

Fig.11
Curves of disturbance and its observed value"


Fig.12
Curve of control quantity"


Fig.13
Roll angle tracking curves with parameter perturbations"


Fig.14
Control deflection curves with parameter perturbations"

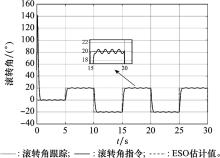
Fig.15
Curves of roll angle command, tracking and observed value"


Fig.16
System state curves of x2"
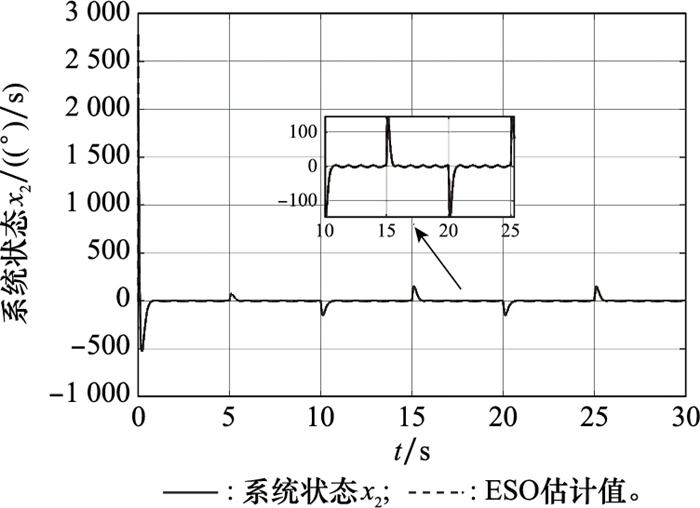
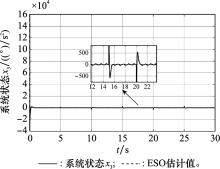
Fig.17
System state curves of x3"


Fig.18
Curves of disturbance and its observed value"


Fig.19
Control quantity curve"


Fig.20
Performance comparison for different controllers"

| 1 |
REGAN F J , SMITH J .Aeroballistics of a terminally corrected spinning projectile (TCSP)[J].Journal of Spacecraft and Rockets,1975,12(12):733-738.
doi: 10.2514/3.57041 |
| 2 | 王中原, 史金光, 常思江, 等.弹道修正弹技术发展综述[J].弹道学报,2021,33(2):1-12. |
| WANG Z Y , SHI J G , CHANG S J , et al.Review on development of technology of trajectory correction projectile[J].Journal of Ballistics,2021,33(2):1-12. | |
| 3 | 邢炳楠, 杜忠华, 杜成鑫.二维弹道修正弹及其制导控制技术综述[J].国防科技大学学报,2021,43(4):53-68. |
| XING B N , DU Z H , DU C X .Review on two-dimensional tra- jectory correction projectile and its guidance and control technology[J].Journal of National University of Defense Technology,2021,43(4):53-68. | |
| 4 | PARK W, RYOO C K, KIM Y, et al. A new practical guidance law for a guided projectile[C]//Proc. of the AIAA Guidance, Navigation, and Control Conference, 2011. |
| 5 |
TIPAN S , THEODOULIS S , THAI S , et al.Nonlinear dynamic inversion flight control design for guided projectiles[J].Journal of Guidance, Control, and Dynamics,2020,43(12):1-6.
doi: 10.2514/1.G002893.c1 |
| 6 | GAGNON E, LAUZON M. Course correction fuze concept analysis for in-service 155 mm spin-stabilized gunnery projectiles[C]// Proc. of the AIAA Guidance, Navigation & Control Conference & Exhibit, 2013. |
| 7 | 柯知非, 宋卫东.二维弹道修正组件发展现状及关键技术[J].飞航导弹,2018,(5):81-85. |
| KE Z F , SONG W D .Development status and key technologies of two-dimensional trajectory correction projectiles[J].Aerodynamic Missile Journal,2018,(5):81-85. | |
| 8 | 程杰, 于纪言, 王晓鸣, 等.隔转鸭舵式弹道修正弹电磁执行机构工况研究[J].兵工学报,2014,35(12):2010-2015. |
| CHENG J , YU J Y , WANG X M , et al.Research on working condition of electromagnetic actuator of trajectory correction projectile with decoupled canards[J].Acta Armamentarii,2004,35(12):2010-2015. | |
| 9 |
程杰, 王晓鸣, 于纪言, 等.隔转鸭舵式弹道修正弹双旋通道参数辨识[J].兵工学报,2016,37(10):1812-1819.
doi: 10.3969/j.issn.1000-1093.2016.10.007 |
|
CHENG J , WANG X M , YU J Y , et al.Parameter estimation of axial dual-spin system in a trajectory correction projectile with decoupled canards[J].Acta Armamentarii,2016,37(10):1812-1819.
doi: 10.3969/j.issn.1000-1093.2016.10.007 |
|
| 10 | 殷婷婷, 贾方秀, 于纪言, 等.双旋弹丸弹道修正组件控制响应模型研究[J].北京理工大学学报,2018,38(2):183-189. |
| YIN T T , JIA F X , YU J Y , et al.Roll control response model of the dual-spin trajectory correction component[J].Transactions of Beijing Institute of Technology,2018,38(2):183-189. | |
| 11 | 殷婷婷, 贾方秀, 于纪言, 等.基于扩张状态观测器的双旋弹丸舵翼转速预测控制[J].北京理工大学学报,2019,39(10):1057-1062, 1068. |
| YIN T T , JIA F X , YU J Y , et al.Direct model predictive rotating speed control for rudder in dual-spin projectile with output-feedback extended state observer[J].Transactions of Beijing Institute of Technology,2019,39(10):1057-1062, 1068. | |
| 12 | 张鑫, 姚晓先.固定翼双旋弹修正组件滚转控制研究[J].北京理工大学学报,2020,40(4):386-395. |
| ZHANG X , YAO X X .Roll control of course correction fuze for dual-spin projectile with fixed-canards[J].Transactions of Beijing Institute of Technology,2020,40(4):386-395. | |
| 13 | ILG M D. Guidance, navigation, and control for munitions[D]. Philadelphia: Drexel University, 2008. |
| 14 | 朱大林. 双旋弹飞行特性与制导控制方法研究[D]. 北京: 北京理工大学, 2015. |
| ZHU D L. Research on flight characteristics, guidance, and control for a dual-spin projectile[D]. Beijing: Beijing Institute of Technology, 2015. | |
| 15 |
ZHU D L , TANG S J , GUO J , et al.Flight stability of a dual-spin projectile with canards[J].Proceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineering,2015,229(4):703-716.
doi: 10.1177/0954410014539293 |
| 16 | THEODOULIS S, GASSMAN V, BRUNNER T, et al. Robust bank-to-turn autopilot design for a class of 155 mm spin-stabilized canard-guided projectiles[C]//Proc. of the AIAA Atmospheric Flight Mechanics Conference, 2013. |
| 17 | SALMAN M U, CHANG B, ILG M D. Control of spinning flying vehicles utilizing partial body despin techniques[C]//Proc. of the 7th Asian Control Conference, 2009. |
| 18 | THEODOULIS S, GASSMAN V, BRUNNER T, et al. Fixed structure robust control design for the 155 mm canard-guided projectile roll-channel autopilot[C]//Proc. of the 21st Mediterranean Conference on Control & Automation Platanias-Chania, 2013. |
| 19 | 刘金琨.滑模变结构控制MATLAB仿真[M].北京: 清华大学出版社,2019. |
| LIU J K .Sliding mode control design and MATLAB simulation[M].Beijing: Tsinghua University Press,2019. | |
| 20 |
刘金琨, 孙富春.滑模变结构控制理论及其算法研究进展[J].控制理论与应用,2007,24(3):407-418.
doi: 10.3969/j.issn.1000-8152.2007.03.015 |
|
LIU J K , SUN F C .Research and development on theory and algorithms of sliding mode control[J].Control Theory & Applications,2007,24(3):407-418.
doi: 10.3969/j.issn.1000-8152.2007.03.015 |
|
| 21 |
UTKIN V I .Variable structure systems with sliding modes[J].IEEE Trans.on Automatic Control,1977,22(2):212-222.
doi: 10.1109/TAC.1977.1101446 |
| 22 |
YU X , KAYNAK O .Sliding-mode control with soft computing: a survey[J].IEEE Trans.on Industrial Electronics,2009,56(9):3275-3285.
doi: 10.1109/TIE.2009.2027531 |
| 23 |
LIU L , DING S H , YU X H .Second-order sliding mode control design subject to an asymmetric output constraint[J].IEEE Trans.on Circuits and Systems Ⅱ-Express Briefs,2021,68(4):1278-1282.
doi: 10.1109/TCSII.2020.3021715 |
| 24 |
LAGHROUCHE S , HARMOUCHE M , CHITOUR Y , et al.Barrier function-based adaptive higher order sliding mode controllers[J].Automatica,2021,123,109355.
doi: 10.1016/j.automatica.2020.109355 |
| 25 | 韩京清.一类不确定对象的扩张状态观测器[J].控制与决策,1995,10(1):85-88. |
| HAN J Q .Extended state observer for a class of uncertain plants[J].Control and Decision,1995,10(1):85-88. | |
| 26 | HAN J Q , HUANG Y .Analysis and design for the second order nonlinear continuous extended states observer[J].Chinese Science Bulletin,2000,21(3):1938-1944. |
| 27 |
LIU C Q , LUO G Z , DUAN X L , et al.Adaptive LADRC-based disturbance rejection method for electromechanical servo system[J].IEEE Trans.on Industry Applications,2020,56(1):876-889.
doi: 10.1109/TIA.2019.2955664 |
| 28 |
LIU C Q , LUO G Z , CHEN Z , et al.Measurement delay compensated LADRC based current controller design for PMSM drives with a simple parameter tuning method[J].ISA Transactions,2020,101,482-492.
doi: 10.1016/j.isatra.2020.01.027 |
| 29 |
LU W Q , TANG B , JI K H , et al.A new load adaptive identification method based on an improved sliding mode observer for PMSM position servo system[J].IEEE Trans.on Power Electronics,2021,36(3):3211-3223.
doi: 10.1109/TPEL.2020.3016713 |
| 30 | WANG W W, GAO Z Q. A comparison study of advanced state observer design techniques[C]//Proc. of the American Control Conference, 2003. |
| 31 | IOANNOU P A , SUN J .Robust adaptive control[M].Upper Saddle River: PTR Prentice-Hall,1996. |
| [1] | Yang GUI, Bochao ZHENG, Peng GAO. Sliding mode attitude control of quadrotor UAV based on NESO-LFDC [J]. Systems Engineering and Electronics, 2024, 46(3): 1075-1083. |
| [2] | Yushi JIANG, Yang CHEN, Lu GAO, Ligen CAI, Jixing LYU. Predefined-time adaptive control for heavy-lift launch vehicles [J]. Systems Engineering and Electronics, 2023, 45(8): 2570-2577. |
| [3] | Haoran LU, Wei ZHENG, Xiaohua CHANG. Fractional order sliding mode guidance law based on robust exact differentiator [J]. Systems Engineering and Electronics, 2023, 45(1): 175-183. |
| [4] | Shibin LUO, Xiaodong LI, Zhongsen WANG, Cheng XU. Generalized super-twisting finite-time control for the ascent phase of parallel carrier [J]. Systems Engineering and Electronics, 2022, 44(5): 1626-1635. |
| [5] | Xiao TANG, Jikun YE, Xu LI. Design of 3D nonlinear prescribed performance guidance law [J]. Systems Engineering and Electronics, 2022, 44(2): 619-627. |
| [6] | Wenqi YANG, Jianhua LU, Xu JIANG, Yuanxin WANG. Design of quadrotor attitude active disturbance rejection controller based on improved ESO [J]. Systems Engineering and Electronics, 2022, 44(12): 3792-3799. |
| [7] | Zhongxing GAO, Bin PENG, Xiaowei CHEN, Yonggang ZHANG. Discrete sliding mode control for ellipse parameters of vibrating gyroscope [J]. Systems Engineering and Electronics, 2022, 44(1): 226-232. |
| [8] | Yuekun ZHANG, Xiaohong JIA, Xiaoyang ZHANG, Weiqiang WANG. Integrated design of detection guidance and control based on finite time disturbance observer [J]. Systems Engineering and Electronics, 2021, 43(5): 1326-1334. |
| [9] | Jiahui GUO, Binan JIANG, Zonghao TIAN. Guidance law design of guided projectile with impact angle and field-of-view constraints [J]. Systems Engineering and Electronics, 2021, 43(4): 1050-1056. |
| [10] | Shiyan SUN, Shang JIANG, Fuqing TIAN, Weige LIANG. Distributed adaptive cooperative guidance law of multiple projectiles with multiple constraints [J]. Systems Engineering and Electronics, 2021, 43(1): 181-190. |
| [11] | Xun GONG, Yunbo FU, Liangxu JIANG, Ce CAO, Tongjian GUO. Application of super-twisting extended state observer in fault reconfiguration of quadrotor aircraft [J]. Systems Engineering and Electronics, 2020, 42(9): 2077-2084. |
| [12] | Yan DING, Zhigang YU. Adaptive sliding mode fault tolerant control of UAV considering input and output constraints [J]. Systems Engineering and Electronics, 2020, 42(10): 2340-2347. |
| [13] | DENG Yingjie, ZHANG Xianku, ZHANG Guoqing. Dynamic positioning system of marine surface vessel with ESO and input saturation control [J]. Systems Engineering and Electronics, 2019, 41(5): 1110-1117. |
| [14] | YANG Xinyan, LIAO Yurong, NI Shuyan. Rapid piecewise power reaching law of sliding mode control design and analysis [J]. Systems Engineering and Electronics, 2019, 41(5): 1127-1132. |
| [15] | WANG Qing, LIU Yu’ang, LIU Chen, DONG Chaoyang. Anti-windup control for morphing wings based on ESO [J]. Systems Engineering and Electronics, 2019, 41(3): 619-625. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||