Systems Engineering and Electronics ›› 2023, Vol. 46 ›› Issue (1): 254-260.doi: 10.12305/j.issn.1001-506X.2024.01.29
• Guidance, Navigation and Control • Previous Articles
Touch interaction technology for obstacle avoidance motion planning of redundant manipulators
Baochen ZHANG1, Jianjiang HUI2, Qi ZHANG3, Zhengxiong LIU1,*, Panfeng HUANG1
- 1. School of Astronautics, Northwestern Polytechnical University, Xi'an 710072, China
2. Beijing Institute of Tracking and Telecommunication, Beijing 100094, China
3. China Academy of Aerospace Aerodynamics, Beijing 100074, China
-
Received:2023-02-10Online:2023-12-28Published:2024-01-11 -
Contact:Zhengxiong LIU
CLC Number:
Cite this article
Baochen ZHANG, Jianjiang HUI, Qi ZHANG, Zhengxiong LIU, Panfeng HUANG. Touch interaction technology for obstacle avoidance motion planning of redundant manipulators[J]. Systems Engineering and Electronics, 2023, 46(1): 254-260.
share this article
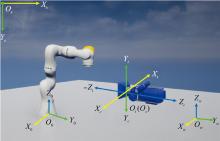
Fig.1
Schematic diagram of coordinates"
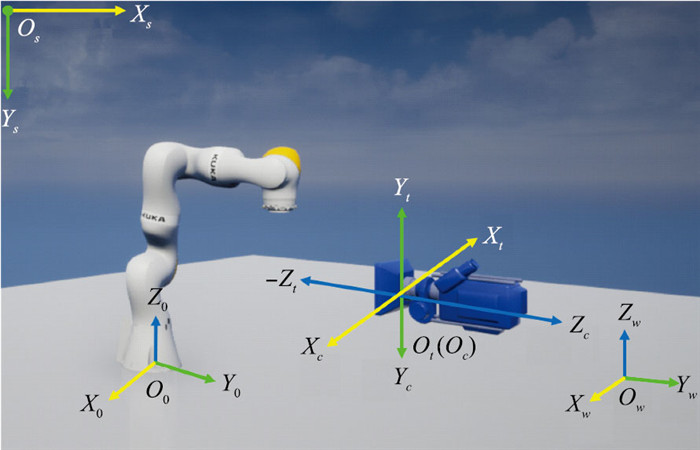
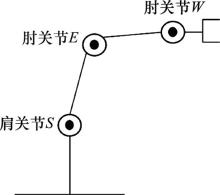
Fig.2
Simplification of KUKA iiwa"
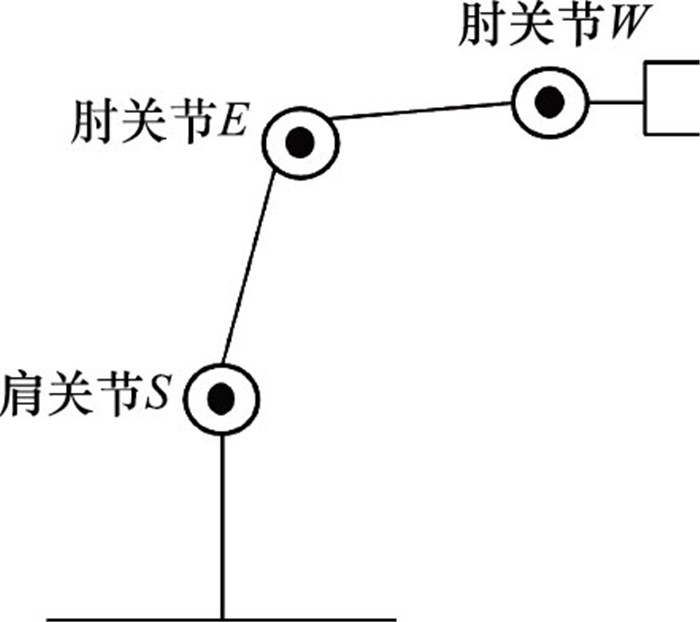
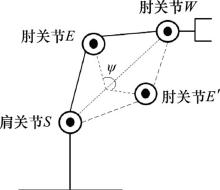
Fig.3
Schematic diagram of arm-angle"
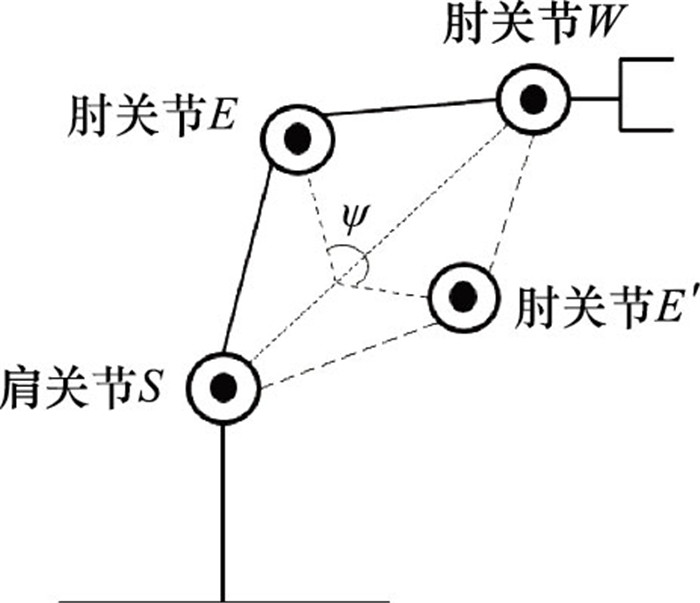
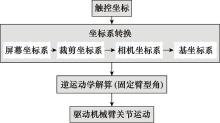
Fig.4
Implementation principle of manipulator motion by touch interaction"
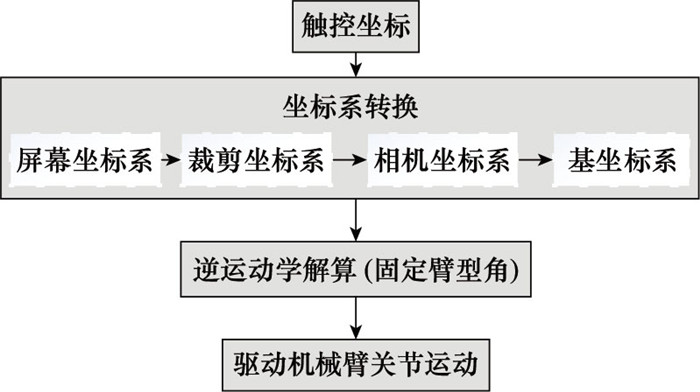
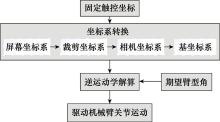
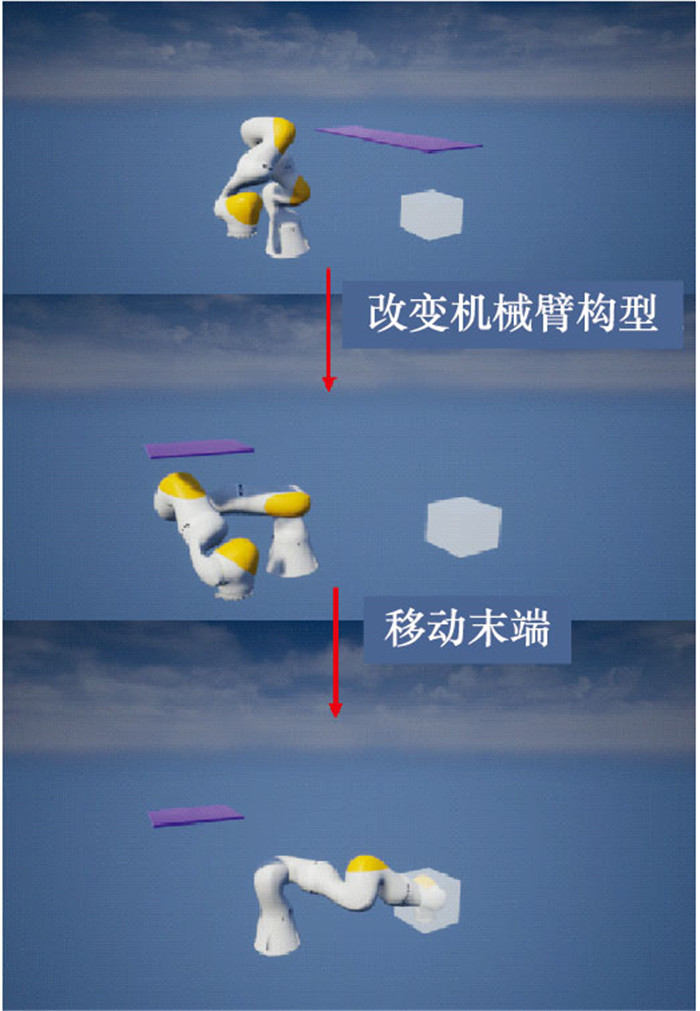
Fig.5
Implementation principle of manipulator configuration changing by touch interaction"
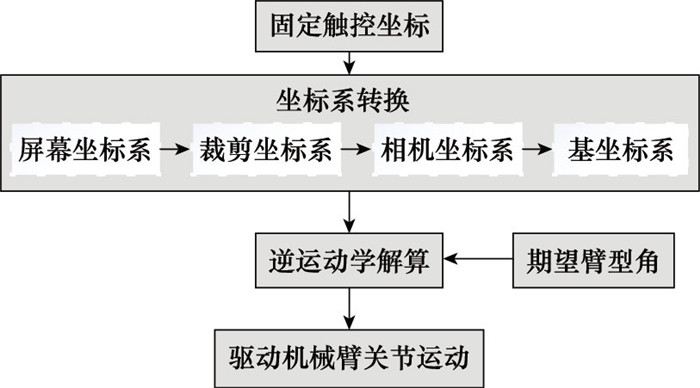
Fig.6
Step 1 of obstacle avoidance motion planning"
Fig.7
Step 2 of obstacle avoidance motion planning"
Fig.8
Step 3 of obstacle avoidance motion planning"
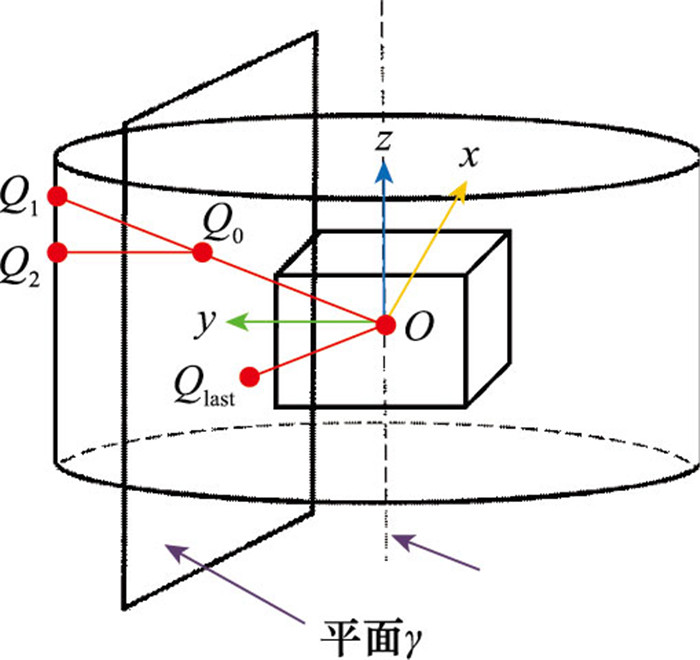
Fig.9
Schematic diagram of Experiment 1"
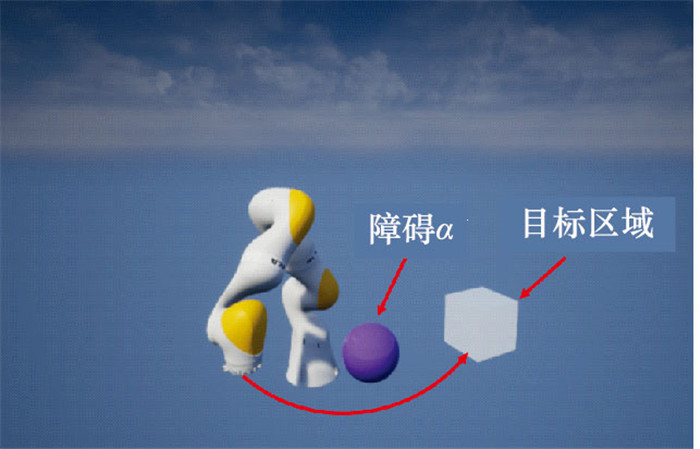

Fig.10
Group a procedure of Experiment 1"
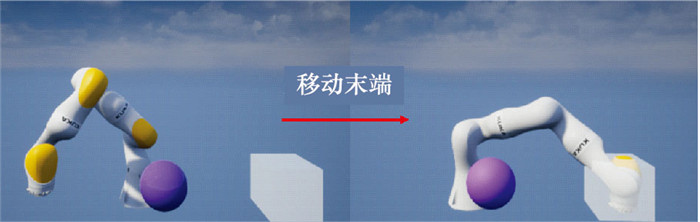
Fig.11
Group b procedure of Experiment 1"
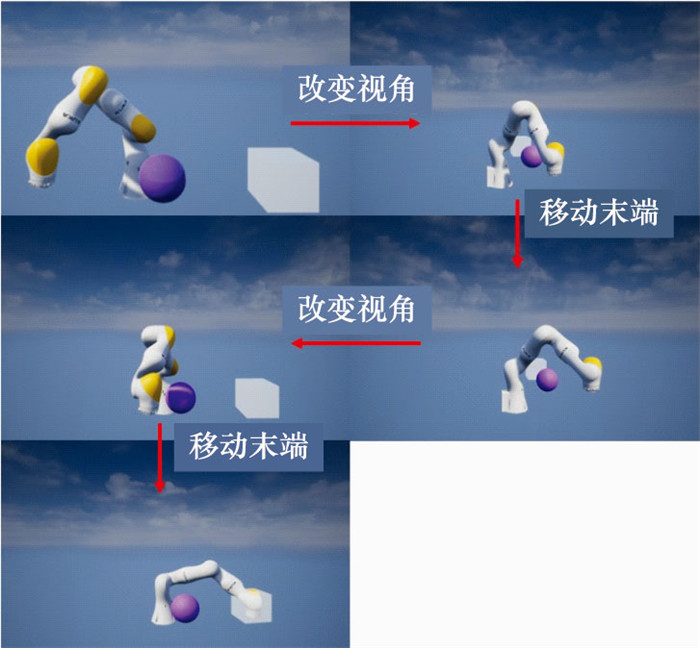
Table 1
Data of Experiment 1"
| 序号 | a组实验完成时间/s | a组避障情况 | b组实验完成时间/s | b组避障情况 |
| 1 | 2.33 | 未碰撞 | 10.15 | 未碰撞 |
| 2 | 2.20 | 未碰撞 | 11.16 | 未碰撞 |
| 3 | 1.79 | 未碰撞 | 9.72 | 未碰撞 |
| 4 | 1.83 | 未碰撞 | 11.49 | 未碰撞 |
| 5 | 2.18 | 未碰撞 | 14.11 | 未碰撞 |
| 6 | 1.68 | 未碰撞 | 10.26 | 未碰撞 |
| 7 | 1.49 | 未碰撞 | 11.78 | 未碰撞 |
| 8 | 2.02 | 未碰撞 | 13.69 | 碰撞 |
| 9 | 1.70 | 未碰撞 | 10.00 | 碰撞 |
| 10 | 1.53 | 未碰撞 | 11.50 | 未碰撞 |
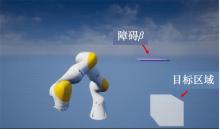
Fig.12
Schematic diagram of Experiment 2"
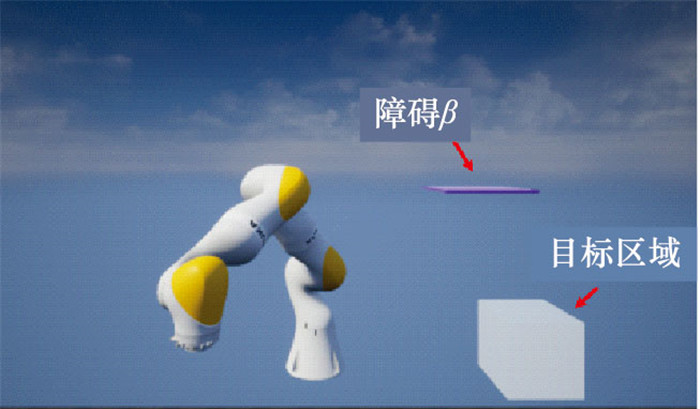
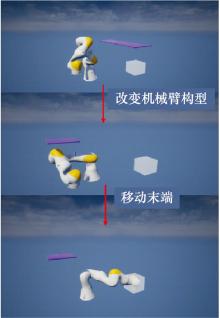
Fig.13
Process of Experiment 2"
| 1 |
OTT C , DIETRICH A , ALBU-SCHÄFFER A . Prioritized multi-task compliance control of redundant manipulators[J]. Automatica, 2015, 53, 416- 423.
doi: 10.1016/j.automatica.2015.01.015 |
| 2 | OTT C, KUGI A, NAKAMURA Y. Resolving the problem of non-integrability of nullspace velocities for compliance control of redundant manipulators by using semi-definite Lyapunov functions[C]// Proc. of the IEEE International Conference on Robotics and Automation, 2008: 1999-2004. |
| 3 | DIETRICH A , OTT C . Hierarchical impedance-based tracking control of kinematically redundant robots[J]. IEEE Trans.on Robotics, 2019, 36 (1): 204- 221. |
| 4 |
KAVRAKI L E , SVESTKA P , LATOMBE J C , et al. Probabilistic roadmaps for path planning in high-dimensional configuration spaces[J]. IEEE Trans.on Robotics and Automation, 1996, 12 (4): 566- 580.
doi: 10.1109/70.508439 |
| 5 |
CHEN G , LUO N , LIU D , et al. Path planning for manipulators based on an improved probabilistic roadmap method[J]. Robotics and Computer -Integrated Manufacturing, 2021, 72, 102196.
doi: 10.1016/j.rcim.2021.102196 |
| 6 | BRY A, ROY N. Rapidly-exploring random belief trees for motion planning under uncertainty[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2011: 723-730. |
| 7 | LAI T, RAMOS F, FRANCIS G. Balancing global exploration and local-connectivity exploitation with rapidly-exploring random disjointed-trees[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2019: 5537-5543. |
| 8 | KUFFNER J J, LAVALLE S M. RRT-connect: an efficient approach to single-query path planning[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2000, 2: 995-1001. |
| 9 | MORIKAWA S, SENOO T, NAMIKI A, et al. Realtime collision avoidance using a robot manipulator with light-weight small high-speed vision systems[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2007: 794-799. |
| 10 | KRUSE D , WEN J T , RADKE R J . A sensor-based dual-arm tele-robotic system[J]. IEEE Trans.on Automation Science and Engineering, 2014, 12 (1): 4- 18. |
| 11 | FRITZSCHE M, ELKMANN N, SCHULENBURG E. Tactile sensing: a key technology for safe physical human robot interaction[C]//Proc. of the 6th International Conference on Human-robot Interaction, 2011: 139-140. |
| 12 |
GARCÍA J G , ROBERTSSON A , ORTEGA J G , et al. Sensor fusion for compliant robot motion control[J]. IEEE Trans.on Robotics, 2008, 24 (2): 430- 441.
doi: 10.1109/TRO.2008.918057 |
| 13 |
LUMELSKY V J , CHEUNG E . Real-time collision avoidance in teleoperated whole-sensitive robot arm manipulators[J]. IEEE Trans.on Systems, Man, and Cybernetics, 1993, 23 (1): 194- 203.
doi: 10.1109/21.214777 |
| 14 |
BOUTRY C M , NEGRE M , JORDA M , et al. A hierarchically patterned, bioinspired e-skin able to detect the direction of applied pressure for robotics[J]. Science Robotics, 2018, 3 (24): eaau6914.
doi: 10.1126/scirobotics.aau6914 |
| 15 |
王晓华, 傅卫平. 一种新的自主移动机器人主动式SLAM算法[J]. 系统工程与电子技术, 2012, 34 (11): 2334- 2338.
doi: 10.3969/j.issn.1001-506X.2012.11.25 |
|
WANG X H , FU W P . New active SLAM algorithm for auto-nomous mobile robot[J]. Systems Engineering and Electronics, 2012, 34 (11): 2334- 2338.
doi: 10.3969/j.issn.1001-506X.2012.11.25 |
|
| 16 | 张凤军, 戴国忠, 彭晓兰. 虚拟现实的人机交互综述[J]. 中国科学: 信息科学, 2016, 46 (12): 1711- 1736. |
| ZHANG F J , DAI G Z , PENG X L . A survey on human-computer interaction in virtual reality[J]. Scientia Sinica Informationis, 2016, 46 (12): 1711- 1736. | |
| 17 | 刘正雄, 司继康, 陈刚, 等. 面向遥操作手眼协调的虚拟仿真交互控制方法[J]. 系统工程与电子技术, 2020, 42 (5): 1146- 1151. |
| LIU Z X , SI J K , CHEN G , et al. Interaction control method of virtual simulation for hand-eye coordination in teleoperation[J]. Systems Engineering and Electronics, 2020, 42 (5): 1146- 1151. | |
| 18 |
倪得晶, 宋爱国, 李会军. 基于虚拟现实的机器人遥操作关键技术研究[J]. 仪器仪表学报, 2017, 38 (10): 2351- 2363.
doi: 10.3969/j.issn.0254-3087.2017.10.001 |
|
NI D J , SONG A G , LI H J . Survey on robot teleoperation based on virtual reality[J]. Chinese Journal of Scientific Instrument, 2017, 38 (10): 2351- 2363.
doi: 10.3969/j.issn.0254-3087.2017.10.001 |
|
| 19 | KUO C Y , HUANG C C , TSAI C H , et al. Development of an immersive SLAM-based VR system for teleoperation of a mobile manipulator in an unknown environment[J]. Computers in Industry, 2021, 132, 103502. |
| 20 |
SU Y P , CHEN X Q , ZHOU T , et al. Mixed reality-enhanced intuitive teleoperation with hybrid virtual fixtures for intelligent robotic welding[J]. Applied Sciences, 2021, 11 (23): 11280.
doi: 10.3390/app112311280 |
| 21 | REBELO J , SEDNAOUI T , DEN EXTER E B , et al. Bilateral robot teleoperation: a wearable arm exoskeleton featuring an intuitive user interface[J]. IEEE Robotics & Automation Magazine, 2014, 21 (4): 62- 69. |
| 22 |
ROLDÁN J J , PEÑA-TAPIA E , MARTÍN-BARRIO A , et al. Multi-robot interfaces and operator situational awareness: study of the impact of immersion and prediction[J]. Sensors, 2017, 17 (8): 1720.
doi: 10.3390/s17081720 |
| 23 |
王德鑫, 张茂军, 熊志辉. 多重触控技术研究综述[J]. 计算机应用研究, 2009, 26 (7): 2404-2406, 2410.
doi: 10.3969/j.issn.1001-3695.2009.07.002 |
|
WANG D X , ZHANG M J , XIONG Z H . Survey on multi-touch research[J]. Application Research of Computers, 2009, 26 (7): 2404-2406, 2410.
doi: 10.3969/j.issn.1001-3695.2009.07.002 |
|
| 24 | 袁庆曙, 王若楠, 潘志庚, 等. 空间增强现实中的人机交互技术综述[J]. 计算机辅助设计与图形学报, 2021, 33 (3): 321- 332. |
| YUAN Q S , WANG R N , PAN Z G , et al. A survey on human-computer interaction in spatial augmented reality[J]. Journal of Computer-Aided Design & Computer Graphics, 2021, 33 (3): 321- 332. | |
| 25 | 张琦. 面向人机交互的冗余机械臂智能规划技术研究[D]. 西安: 西北工业大学, 2021. |
| ZHANG Q. Research on intelligent planning technology of redundant manipulators for human-robot interaction[D]. Xi'an: Northwestern Polytechnical University, 2021. | |
| 26 | SHE Y, XU W F, WANG Z Y, et al. Inverse kinematics of SSRMS-type manipulators with single joint locked failure[C]//Proc. of the IEEE International Conference on Robotics and Biomimetics, 2013: 7-12. |
| 27 |
FARIA C , FERREIRA F , ERLHAGEN W , et al. Position-based kinematics for 7-DoF serial manipulators with global configuration control, joint limit and singularity avoidance[J]. Mechanism and Machine Theory, 2018, 121, 317- 334.
doi: 10.1016/j.mechmachtheory.2017.10.025 |
| 28 | SHIMIZU M , KAKUYA H , YOON W K , et al. Analytical inverse kinematic computation for 7-DOF redundant manipulators with joint limits and its application to redundancy resolution[J]. IEEE Trans.on Robotics, 2008, 24 (5): 1131- 1142. |
| 29 | 赵京, 龚世秋, 张自强. 7自由度拟人臂仿人运动的逆运动学解析解[J]. 机械工程学报, 2018, 54 (21): 25- 32. |
| ZHAO J , GONG S Q , ZHANG Z Q . Analytical inverse kinematics of anthropomorphic movements for 7-DOF humanoid manipulators[J]. Journal of Mechanical Engineering, 2018, 54 (21): 25- 32. | |
| 30 | KREUTZ-DELGADO K , LONG M , SERAJI H . Kinematic analysis of 7-DOF manipulators[J]. The International Journal of Robotics Research, 1992, 11 (5): 469- 481. |
| [1] | Tao HU, Liqun SHEN, Yuyang TIAN, Weifeng DONG. Design and evaluation of simulation engine for test-firing-control process of aerospace complex system [J]. Systems Engineering and Electronics, 2023, 45(12): 3866-3874. |
| [2] | Shan GAO, Yongfeng ZHI, Pu ZHANG, Xuan ZUO. Consistency validation method of simulation results based on improved grey relational analysis for aerospace product performance prototype [J]. Systems Engineering and Electronics, 2023, 45(9): 2777-2783. |
| [3] | Haoliang REN, Jianchao ZHANG, Huichuan CHENG. Modeling and analysis method of weapon equipment system capability requirements based on SysML [J]. Systems Engineering and Electronics, 2023, 45(9): 2843-2851. |
| [4] | Yanyan HUANG, Kaisheng WANG, Yu'ang SHI. Research on an evaluation model for data link operational support capability based on networking index [J]. Systems Engineering and Electronics, 2023, 45(8): 2361-2369. |
| [5] | Fan YANG, Ping MA, Wei LI, Ming YANG. Intelligent ranking evaluation method of simulation models based on siamese network [J]. Systems Engineering and Electronics, 2023, 45(7): 2060-2068. |
| [6] | Shihui WU, Yu ZHOU, Zhengxin LI, Xiaodong LIU, Bo HE. Approach to simulation optimization of time-varying parameters system based on neural network [J]. Systems Engineering and Electronics, 2023, 45(2): 472-480. |
| [7] | Wei ZHANG, Jing HE, Xiaowei XIE, Guoqiang ZHAO, Zhen CHEN. Design and implementation of simulation evaluation system for joint battlefield navigation countermeasure [J]. Systems Engineering and Electronics, 2022, 44(10): 3182-3189. |
| [8] | Jun MA, Jingyu YANG, Xi WU. Evaluation of operational system of systems effectiveness based on pre-clustering active semi-supervised learning [J]. Systems Engineering and Electronics, 2022, 44(6): 1889-1896. |
| [9] | Luying REN, Qingguo WANG, Qian MA, Haifeng ZHANG, Weiwei XU. Modeling method study for virtual prototyping of complex products based on meta model [J]. Systems Engineering and Electronics, 2022, 44(5): 1609-1614. |
| [10] | Yuanyuan ZHANG, Yang GAO, Peng ZHU, Jintao LIU, Shushan GU. UAV reconnaissance tactical planning based on colored Petri nets [J]. Systems Engineering and Electronics, 2022, 44(3): 900-907. |
| [11] | Tongliang LU, Wenhao CHEN, Bingfeng GE, Qiling DENG. Multi-layer network modeling for combat system-of-systems under information support [J]. Systems Engineering and Electronics, 2022, 44(2): 520-528. |
| [12] | Ketao FENG, Xiaoyi LI, Chen QU, Shentao WANG, Mou CHEN. Simulation research on effective coverage of civil aviation ground to air VHF communication based on DEM [J]. Systems Engineering and Electronics, 2022, 44(2): 684-695. |
| [13] | Jun MA, Jingyu YANG, Liyan ZOU. Generation method of operational system of systems capability graph based on Stacking integrated meta-model [J]. Systems Engineering and Electronics, 2022, 44(1): 154-163. |
| [14] | Ziyan LIU, Shanshan MA, Jing LIANG, Mingcheng ZHU, Lei YUAN. Attention mechanism based CNN channel estimation algorithm in millimeter-wave massive MIMO system [J]. Systems Engineering and Electronics, 2022, 44(1): 307-312. |
| [15] | Guangxun ZENG, Guanghong GONG, Ni LI. Combat system-of-systems simulation scenario generation approach based on semantic matching [J]. Systems Engineering and Electronics, 2021, 43(8): 2154-2162. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||