Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (7): 2002-2009.doi: 10.12305/j.issn.1001-506X.2023.07.10
• Sensors and Signal Processing • Previous Articles Next Articles
Target tracking for noncooperative bistatic radar based on improved probability hypothesis density filter
Sen WANG1,2, Qinglong BAO1,2,*, Jiameng PAN1,2, Qian ZHU3
- 1. College of Electronic Science and Technology, National University of Defense Technology, Changsha 410073, China
2. National Key Laboratory of Science and Technology on ATR, National University of Defense Technology, Changsha 410073, China
3. Beijing Institute of Remote Sensing, Beijing 100192, China
-
Received:2021-10-18Online:2023-06-30Published:2023-07-11 -
Contact:Qinglong BAO
CLC Number:
Cite this article
Sen WANG, Qinglong BAO, Jiameng PAN, Qian ZHU. Target tracking for noncooperative bistatic radar based on improved probability hypothesis density filter[J]. Systems Engineering and Electronics, 2023, 45(7): 2002-2009.
share this article

Fig.1
Geometry relationship of NBR"

Table 1
Motion parameters of targets"
| 目标 | 初始状态均值 | 出生时间/s | 死亡时间/s |
| 1 | [4 000, -100, 4 000, 0]T | 1 | 77 |
| 2 | [-2 000, 80, 2 000, 80]T | 10 | 68 |
| 3 | [0, 40, 6 428, -40]T | 14 | 94 |

Fig.2
Simulation scenario and tracking results"


Fig.3
Mean OSPA distance"


Fig.4
Mean cardinality estimation result"
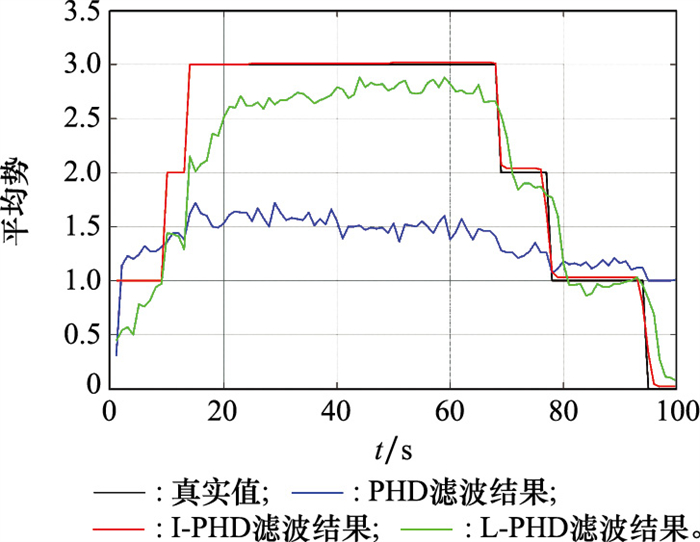

Fig.5
Mean OSPA with respect to different detection probabilities"


Fig.6
Mean RMSE of cardinality with respect to different detection probabilities"

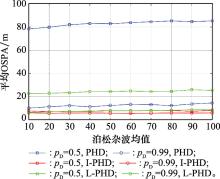
Fig.7
Mean OSPA with respect to different average numbers of Poisson clutter"

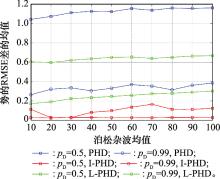
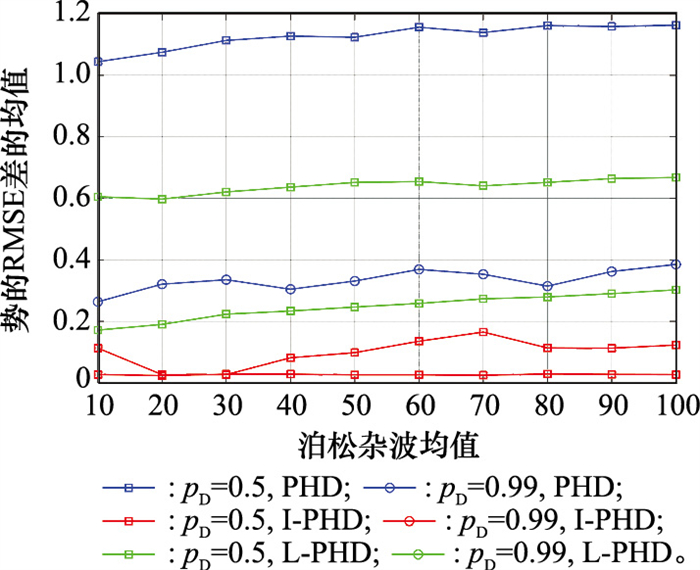
Fig.8
Mean RMSE of cardinality with respect to different average numbers of Poisson clutter"
| 1 | 宋杰, 何友, 蔡复青, 等. 基于非合作雷达辐射源的无源雷达技术综述[J]. 系统工程与电子技术, 2009, 31 (9): 2151-2156, 2180 |
| SONG J , HE Y , CAI F Q , et al. Overview of passive radar technology based on non-cooperative radar illuminator[J]. Systems Engineering and Electronics, 2009, 31 (9): 2151-2156, 2180 | |
| 2 | 鲍庆龙, 王森, 潘嘉蒙, 等. 非合作雷达辐射源目标探测系统关键技术分析[J]. 电波科学学报, 2020, 35 (4): 496- 503. |
| BAO Q L , WANG S , PAN J M , et al. Key technology analysis of target detection system based on non-cooperative radar illuminator[J]. Chinese Journal of Radio Science, 2020, 35 (4): 496- 503. | |
| 3 |
WANG Y S , BAO Q L , WANG D H , et al. An experimental study of passive bistatic radar using uncooperative radar as a transmitter[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12 (9): 1868- 1872.
doi: 10.1109/LGRS.2015.2432574 |
| 4 | CHABRIEL G, BARRERE J, GASSIER G, et al. Passive covertradars using CP-OFDM signals: a new efficient method to extract targets echoes[C]//Proc. of the IEEE International Radar Conference, 2014. |
| 5 |
KAISER S A , CHRISTIANSON A J , NARAYANAN R M . Multistatic doppler estimation using global positioning system passive coherent location[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 55 (6): 2978- 2991.
doi: 10.1109/TAES.2019.2899771 |
| 6 | LIU Y Q , YI J X , WAN X R , et al. Time-varying clutter suppression in CP-OFDM based passive radar for slowly moving targets detection[J]. IEEE Sensors Journal, 2020, 20 (16): 9079- 9090. |
| 7 |
CHEN G , WANG J , ZUO L , et al. Two-stage clutter and interference cancellation method in passive bistatic radar[J]. IET Signal Processing, 2020, 14 (6): 342- 351.
doi: 10.1049/iet-spr.2019.0338 |
| 8 |
BLASONE G P , COLONE F , LOMBARDO P , et al. Passive radar DPCA schemes with adaptive channel calibration[J]. IEEE Trans.on Aerospace and Electronic Systems, 2020, 56 (5): 4014- 4034.
doi: 10.1109/TAES.2020.2987478 |
| 9 |
THARMARASA R , SUBRAMANIAM M , NADARAJAH N , et al. Multitarget passive coherent location with transmitter-origin and target-altitude uncertainties[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (3): 2530- 2550.
doi: 10.1109/TAES.2012.6237607 |
| 10 |
DAUN M , NICKEL U , KOCH W . Tracking in multistatic passive radar systems using DAB/DVB-T illumination[J]. Signal Processing, 2012, 92 (6): 1365- 1386.
doi: 10.1016/j.sigpro.2011.09.005 |
| 11 |
CHOI S , CROUSE D F , WILLETT P , et al. Approaches to Cartesian data association passive radar tracking in a DAB/DVB network[J]. IEEE Trans.on Aerospace and Electronic Systems, 2014, 50 (1): 649- 663.
doi: 10.1109/TAES.2013.120431 |
| 12 |
LEHMANN F . Recursive Bayesian filtering for multitarget track-before-detect in passive radars[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (3): 2458- 2480.
doi: 10.1109/TAES.2012.6237603 |
| 13 |
LV M , YI J X , WAN X R , et al. Target tracking in time-division-multifrequency-based passive radar[J]. IEEE Sensors Journal, 2020, 20 (8): 4382- 4394.
doi: 10.1109/JSEN.2020.2964291 |
| 14 |
SHU K , YI J X , WAN X R , et al. A hybrid tracking algorithm for multistatic passive radar[J]. IEEE Systems Journal, 2021, 15 (2): 2024- 2034.
doi: 10.1109/JSYST.2020.2994009 |
| 15 |
SUBEDI S , ZHANG Y D , AMIN M G , et al. Group sparsity based multi-target tracking in passive multi-static radar systems using Doppler-only measurements[J]. IEEE Trans.on Signal Processing, 2016, 64 (14): 3619- 3634.
doi: 10.1109/TSP.2016.2552498 |
| 16 |
GUO Y F , THARMARASA R , KIRUBARAJAN T , et al. Passive coherent location with unknown transmitter states[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53 (1): 148- 168.
doi: 10.1109/TAES.2017.2649739 |
| 17 | KONOVALOV A A . Target tracking algorithm for passive coherent location[J]. IET Radar, Sonar & Navigation, 2016, 10 (7): 1228- 1233. |
| 18 |
KLEIN M , MILLET N . Multireceiver passive radar tracking[J]. IEEE Aerospace and Electronic Systems Magazine, 2012, 27 (10): 26- 36.
doi: 10.1109/MAES.2012.6373909 |
| 19 | BAR-SHALOM Y. Extension of the probabilistic data association filter to multi-target environment[C]//Proc. of the 5th Symposium on Nonlinear Estimation, 1974: 16-21. |
| 20 |
REID D . An algorithm for tracking multiple targets[J]. IEEE Trans.on Automatic Control, 1979, 24 (6): 843- 854.
doi: 10.1109/TAC.1979.1102177 |
| 21 |
RONALD P S M . Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Trans.on Aerospace and Electronic Systems, 2003, 39 (4): 1152- 1178.
doi: 10.1109/TAES.2003.1261119 |
| 22 |
ZHU Q , LI T , PAN J M , et al. The modified probability hypothesis density filter with adaptive birth intensity estimation for multi-target tracking in low detection probability[J]. IEEE Access, 2020, 8, 43690- 43710.
doi: 10.1109/ACCESS.2020.2977431 |
| 23 | WU M, ZHENG D K, YUAN J Q. Probability hypothesis density filter with low detection probability[C]//Proc. of the IET International Radar Conference, 2020: 1276-1282. |
| 24 | GERALD C , DONALD E D . Optimum constant-gain filters[J]. IEEE Trans.on Industrial Electronics and Control Instrumentation, 1974, 21 (3): 159- 163. |
| 25 |
VO B N , SINGH S , DOUCET A . Sequential Monte Carlo methods for multi-target filtering with random finite sets[J]. IEEE Trans.on Aerospace and Electronic Systems, 2005, 41 (4): 1224- 1245.
doi: 10.1109/TAES.2005.1561884 |
| 26 |
VO B N , MA W K . The Gaussian mixture probability hypothesis density filter[J]. IEEE Trans.on Signal Processing, 2006, 54 (11): 4091- 4104.
doi: 10.1109/TSP.2006.881190 |
| 27 | GAO G L , ZHONG Y M , GAO S S , et al. Double-channel sequential probability ratio test for failure detection in multi-sensor integrated systems[J]. IEEE Trans.on Instrumentation and Measurement, 2021, 70, 3514814. |
| 28 | BOROUMAND P, ALBERT G I F. Error exponent sensitivity of sequential probability ratio testing[C]//Proc. of the IEEE International Symposium on Information Theory, 2021: 184-189. |
| 29 | 张腾, 曹晨, 张靖, 等. 针对低检测概率的概率假设密度滤波算法[J]. 中国电子科学研究院学报, 2018, 13 (1): 36- 41. |
| ZHANG T , CAO C , ZHANG J , et al. Probability hypothesis density filtering algorithm for low detection probability[J]. Journal of China Academy of Electronics and Information Technology, 2018, 13 (1): 36- 41. | |
| 30 |
SCHUHMACHER D , VO B T , VO B N . A consistent metric for performance evaluation of multi-object filters[J]. IEEE Trans.on Signal Processing, 2008, 56 (8): 3447- 3457.
doi: 10.1109/TSP.2008.920469 |
| [1] | Wenhao BI, Jie ZHOU, An ZHANG, Li LIU. JPDA algorithm based on maximum entropy fuzzy clustering in clutter environment [J]. Systems Engineering and Electronics, 2023, 45(7): 1920-1927. |
| [2] | Kan SHU, Xianrong WAN, Jianxin YI, Deqiang XIE, Yueyang HU, Yun TONG. 3D target tracking for duel coordinate passive radar based on state decoupling [J]. Systems Engineering and Electronics, 2023, 45(6): 1658-1666. |
| [3] | Zhengwei LIU, Ying CHEN, Yaobing LU. PHD filter for small-angle crossing of multi-target trajectories [J]. Systems Engineering and Electronics, 2023, 45(4): 982-990. |
| [4] | Yi ZHANG, Hao YU, Xiuxia YANG, Zijie JIANG. Integrated design of group formation control and tracking of UAV swarm [J]. Systems Engineering and Electronics, 2023, 45(3): 848-858. |
| [5] | Yunpu ZHANG, Ganlin SHAN, Yan HUANG, Qiang FU. Multiple mobile sensors scheduling method for ground target detection and tracking considering blind zone [J]. Systems Engineering and Electronics, 2023, 45(2): 453-464. |
| [6] | Lei AN, Zhaorui LI, Bing JI. Non-myopic scheduling method for mobile active/passive sensor in clutter environment [J]. Systems Engineering and Electronics, 2023, 45(1): 165-174. |
| [7] | Zhuling QIU, Yufei ZHA, Zhenyu LI, Yuming LI, Peng ZHANG, Chuan ZHU. Temporal regularized correlation filter tracking algorithm based on multi-model distillation [J]. Systems Engineering and Electronics, 2022, 44(8): 2448-2456. |
| [8] | Zilin HOU, Ting CHENG, Han PENG. GMPHD based on measurement conversion sequential filtering for maneuvering target tracking [J]. Systems Engineering and Electronics, 2022, 44(8): 2474-2482. |
| [9] | Haoran SHI, Faxing LU, Jiangxin QI, Guang YANG. Cooperative target tracking of UAVs based on aided beacon [J]. Systems Engineering and Electronics, 2022, 44(7): 2302-2310. |
| [10] | Shuai WANG, Jianjun XIANG, Fang PENG, Shujuan TANG. Target tracking algorithm based on a new steepest descent method [J]. Systems Engineering and Electronics, 2022, 44(5): 1512-1519. |
| [11] | Huaisheng XIN, Chen CAO. Interacting multiple model based grouping δ-generalized labeledmulti-Bernoulli algorithm [J]. Systems Engineering and Electronics, 2022, 44(4): 1128-1138. |
| [12] | Jiahao XIE, Shucai HUANG, Daozhi WEI, Zhaoyu ZHANG, Wenhao WANG. Solution for uncertain hybrid multi-sensor alliance based on PEV principle [J]. Systems Engineering and Electronics, 2022, 44(3): 819-826. |
| [13] | Zizhuang SONG, Jiawei YANG, Dongfang ZHANG, Shiqiang WANG, Shuo ZHANG. Real-time infrared multi-class multi-target anchor-free tracking network [J]. Systems Engineering and Electronics, 2022, 44(2): 401-409. |
| [14] | Huaisheng XIN, Penghan SONG, Chen CAO. Multiple model based generalized labeled multi-Bernoulli filter [J]. Systems Engineering and Electronics, 2022, 44(12): 3603-3613. |
| [15] | Haonan LIU, Liping SONG. Group structure update model and group target tracking algorithm based on kernel Fisher discriminant [J]. Systems Engineering and Electronics, 2022, 44(10): 3012-3019. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||