Systems Engineering and Electronics ›› 2023, Vol. 45 ›› Issue (6): 1658-1666.doi: 10.12305/j.issn.1001-506X.2023.06.09
• Sensors and Signal Processing • Previous Articles
3D target tracking for duel coordinate passive radar based on state decoupling
Kan SHU, Xianrong WAN, Jianxin YI, Deqiang XIE, Yueyang HU, Yun TONG
- School of Electronic Information, Wuhan University, Wuhan 430072, China
-
Received:2022-01-13Online:2023-05-25Published:2023-06-01 -
Contact:Xianrong WAN
CLC Number:
Cite this article
Kan SHU, Xianrong WAN, Jianxin YI, Deqiang XIE, Yueyang HU, Yun TONG. 3D target tracking for duel coordinate passive radar based on state decoupling[J]. Systems Engineering and Electronics, 2023, 45(6): 1658-1666.
share this article
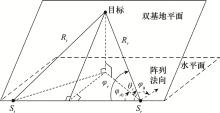
Fig.1
Spatial geometric relationship of passive radar"
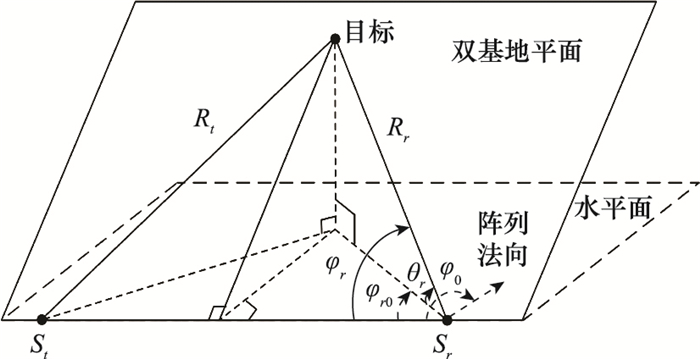
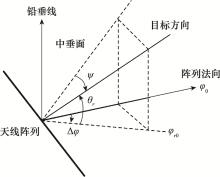
Fig.2
Relationship of the target and azimuth in the ULA"
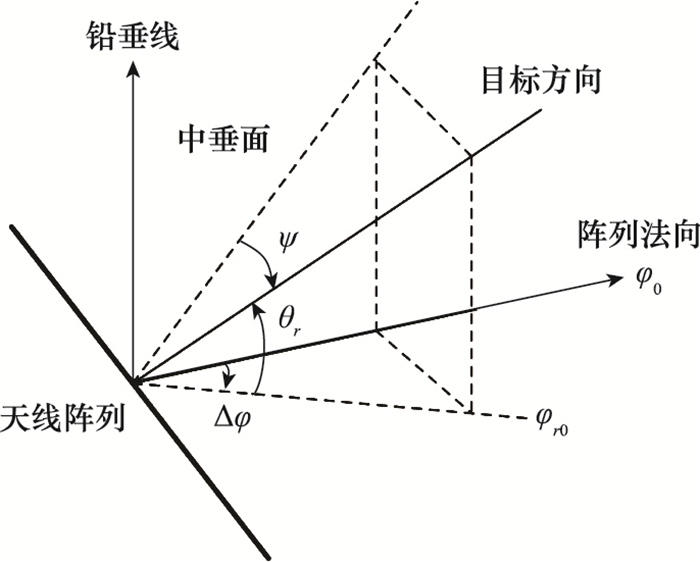

Fig.3
Target altitude estimator"
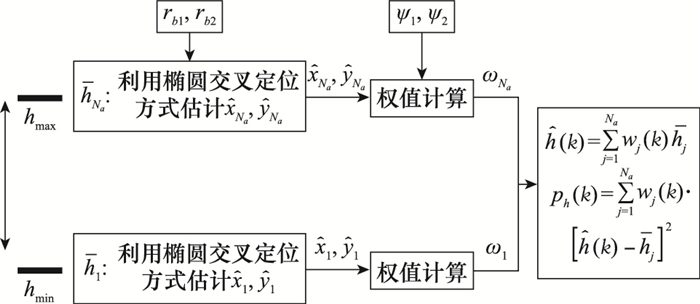
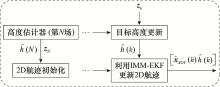
Fig.4
Target horizontal state estimator"
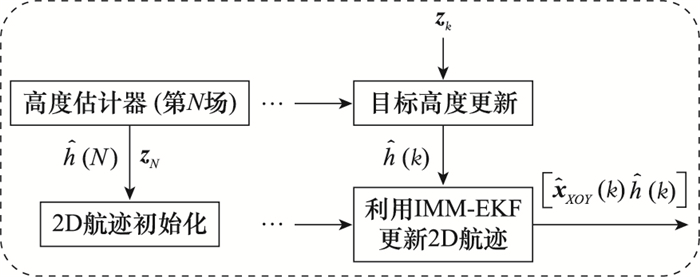
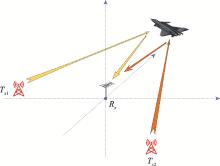
Fig.5
Experimental scenario"

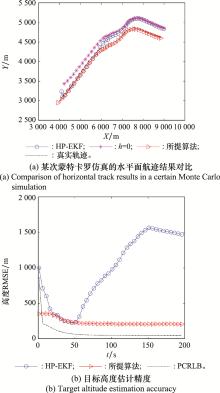
Fig.6
Comparison of horizontal track results in a certain Monte Carlo simulation and target altitude estimation accuracy"
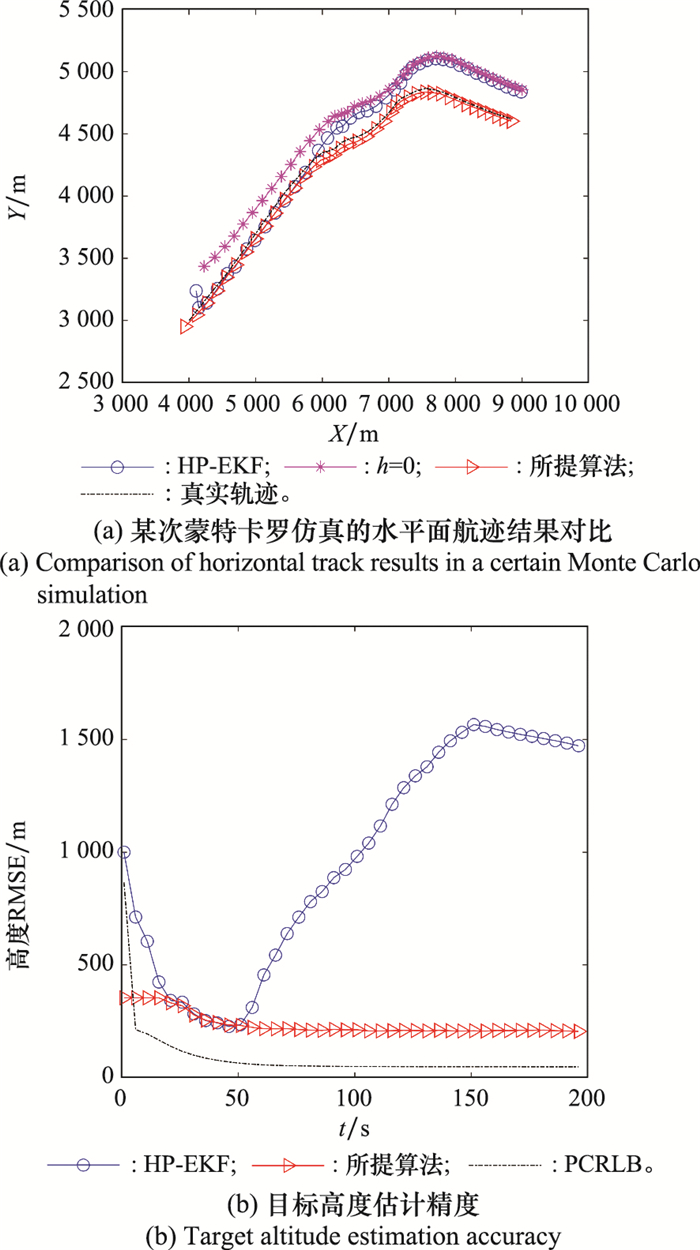
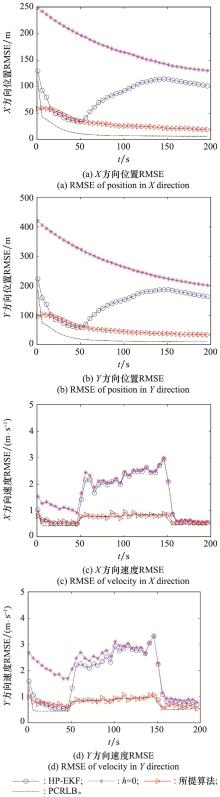
Fig.7
Error analysis"
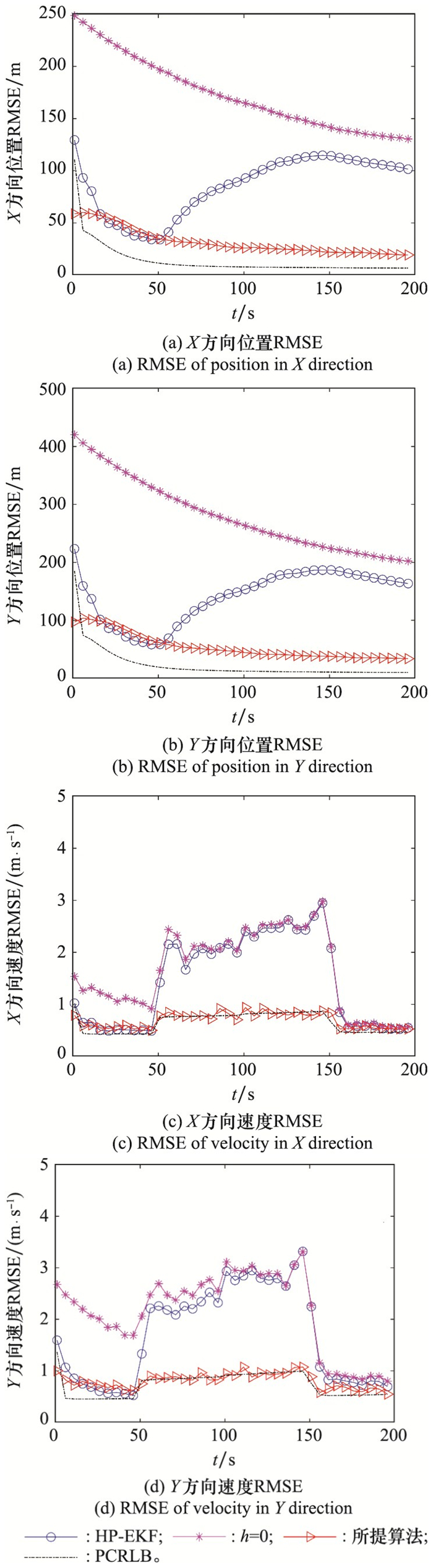
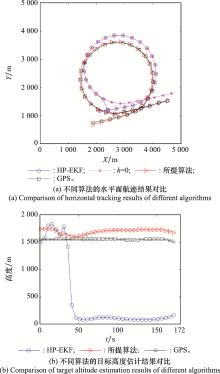
Fig.8
Comparison of 3D tracking results of different algorithms"
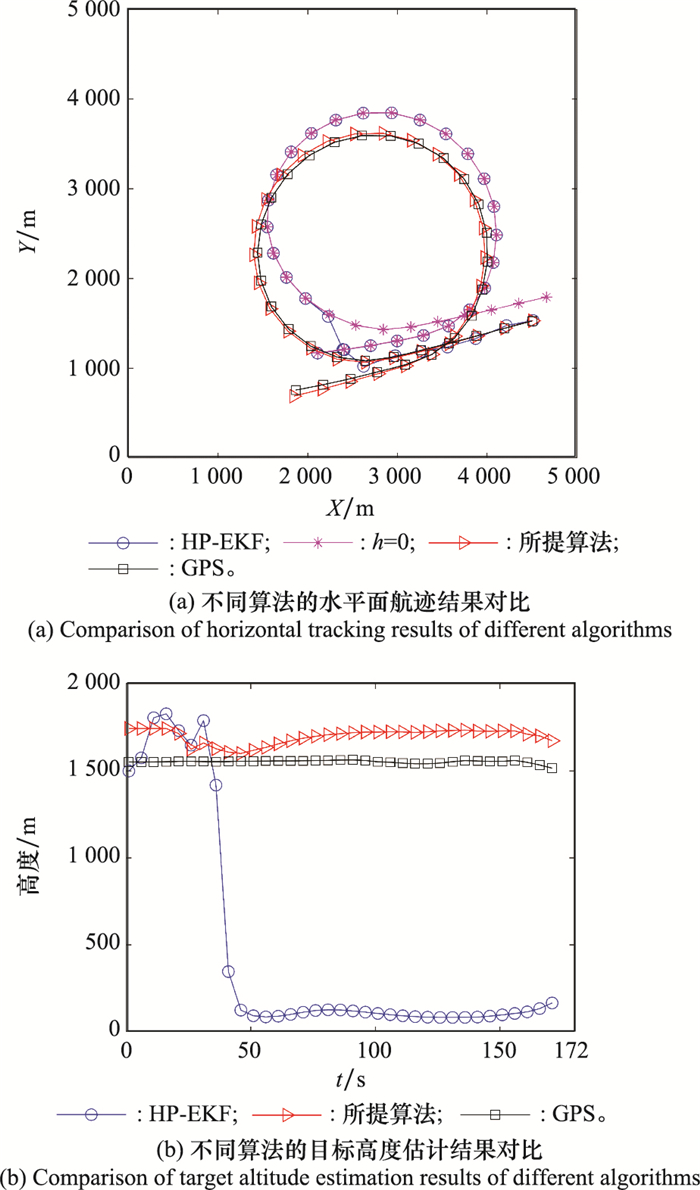

Fig.9
Weight of each height sub-interval changes with time"
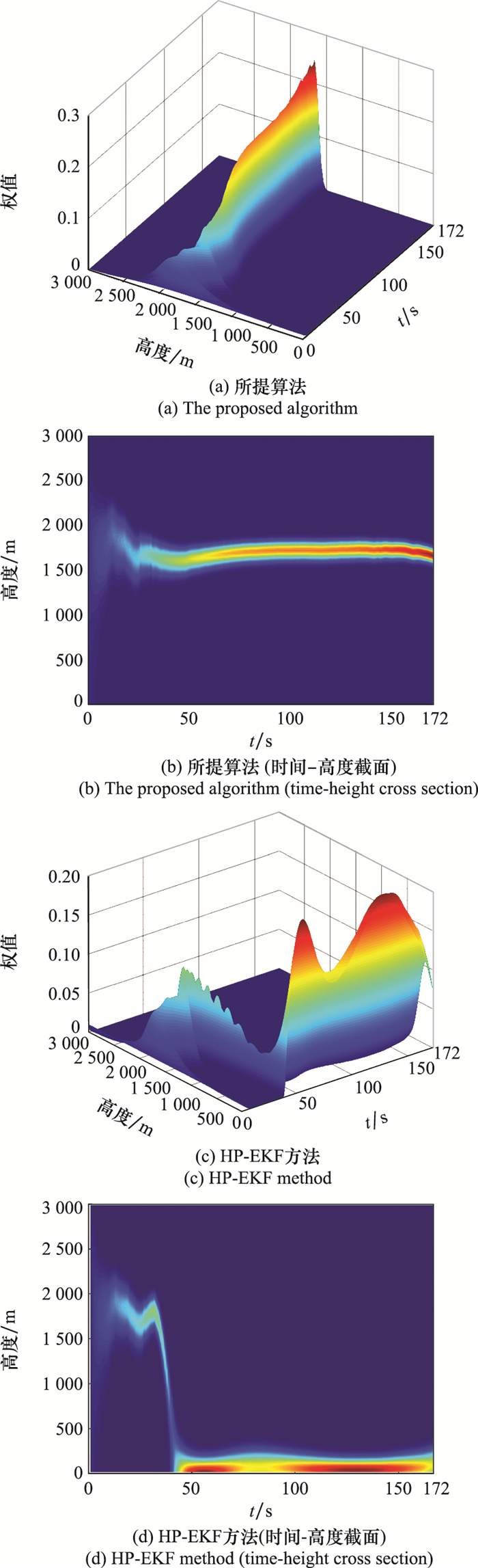
Table 1
Tracking accuracy statistics of different algorithms"
| 算法 | X/m | Y/m | h/m | Vx/(m/s) | Vy/(m/s) |
| h=0 | 150.8 | 308.9 | - | 5.3 | 3.3 |
| HP-EKF | 122.9 | 269.2 | 1 274.8 | 5.2 | 3.5 |
| 所提算法 | 43.5 | 29.8 | 152.9 | 0.7 | 1.6 |
| 1 | 万显荣, 易建新, 詹伟杰, 等. 基于多照射源的被动雷达研究进展与发展趋势[J]. 雷达学报, 2020, 9 (6): 939- 958. |
| WAN X R , YI J X , ZHAN W J , et al. Research progress and development trend of the multi-illuminator-based passive radar[J]. Journal of Radar, 2020, 9 (6): 939- 958. | |
| 2 | 万显荣. 基于低频段数字广播电视信号的外辐射源雷达发展现状与趋势[J]. 雷达学报, 2012, 1 (2): 109- 123. |
| WAN X R . An overview on development of passive radar based on the low frequency band digital broadcasting and TV signals[J]. Journal of Radar, 2012, 1 (2): 109- 123. | |
| 3 |
宋杰, 何友, 蔡复青, 等. 基于非合作雷达辐射源的无源雷达技术综述[J]. 系统工程与电子技术, 2009, 31 (9): 2151- 2156.2151-2156, 2180
doi: 10.3321/j.issn:1001-506X.2009.09.028 |
|
SONG J , HE Y , CAI F Q , et al. Overview of passive radar technology based on non-cooperative radar illuminator[J]. Systems Engineering and Electronics, 2009, 31 (9): 2151- 2156.2151-2156, 2180
doi: 10.3321/j.issn:1001-506X.2009.09.028 |
|
| 4 |
TAO R , GAO Z W , WANG Y . Side peaks interference suppression in DVB-T based passive radar[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (4): 3610- 3619.
doi: 10.1109/TAES.2012.6324746 |
| 5 | KUSCHEL H , CRISTALLINI D , OLSEN K E . Tutorial: passive radar tutorial[J]. IEEE Aerospace and Electronic Systems Magazine, 2019, 34 (2): 2- 19. |
| 6 | CARDINALI R, ANNIBALLI E, BONGIOANNI C, et al. ARGUS 3D: security enhancements through innovative radar technologies[C]//Proc. of the 8th International Conference on Availabolity, Reliability and Security, 2013: 759-765. |
| 7 | 万显荣, 易建新, 方高, 等. 三坐标数字电视外辐射源雷达实验研究[J]. 系统工程与电子技术, 2014, 36 (7): 1263- 1268. |
| WAN X R , YI J X , FANG G , et al. Experimental research of digital television based three-dimensional passive radar[J]. Systems Engineering and Electronics, 2014, 36 (7): 1263- 1268. | |
| 8 |
THARMARASA R , SUBRAMANIAM M , NADARAJAH N , et al. Multitarget passive coherent location with transmitter-origin and target-altitude uncertainties[J]. IEEE Trans. Aerospace and Electronic Systems, 2012, 48 (3): 2530- 2550.
doi: 10.1109/TAES.2012.6237607 |
| 9 |
NOROOZI A , SEBT M A . Target localization in multistatic passive radar using SVD approach for eliminating the nuisance parameters[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53 (4): 1660- 1671.
doi: 10.1109/TAES.2017.2669558 |
| 10 | CHALISE B K , ZHANG Y D , AMIN M G , et al. Target localization in a multi-static passive radar system through convex optimization[J]. Signal Processing, 2014, 102 (6): 207- 215. |
| 11 |
MALANOWSKI M , KULPA K . Two methods for target localization in multistatic passive radar[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (1): 572- 580.
doi: 10.1109/TAES.2012.6129656 |
| 12 |
AMIRI R , BEHNIA F , ZAMANI H . Asymptotically efficient target localization from bistatic range measurements in distributed MIMO radars[J]. IEEE Signal Processing Letters, 2017, 24 (3): 299- 303.
doi: 10.1109/LSP.2017.2660545 |
| 13 |
KLEIN M , MILLET N . Multireceiver passive radar tracking[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 27 (10): 26- 36.
doi: 10.1109/MAES.2012.6373909 |
| 14 | GAI M J, YI X, HE Y, et al. An approach to tracking a 3D-target with 2D-radar[C]//Proc. of the IEEE International Radar Conference, 2005: 763-768. |
| 15 | RAKVONGTHAI Y, RU J, SIVANANTHAN S, et al. Altitude estimation for 3D tracking with two 2D radars[C]//Proc. of the International Conference on Information Fusion, 2011: 1401-1408. |
| 16 |
MALLICK M , ARULAMPALAM S , YAN Y , et al. Three-dimensional tracking of an aircraft using two-dimensional radars[J]. IEEE Trans.on Aerospace and Electronic Systems, 2018, 54 (2): 585- 600.
doi: 10.1109/TAES.2017.2761138 |
| 17 | MALLICK M, YAN Y J, ARULAMPALAM S. Aircraft 3D trajectory estimation with a single nonlinear filter using two 2D radars[C]//Proc. of the Control Automation and Information Sciences International Conference, 2018: 405-410. |
| 18 |
BORDONARO S V , WILLETT P , BAR-SHALOM Y , et al. Converted measurement sigma point kalman filter for bistatic sonar and radar tracking[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 55 (1): 147- 159.
doi: 10.1109/TAES.2018.2849179 |
| 19 | BLOM H A P , BAR-SHALOM Y . The interacting multiple model algorithm for systems with Markovian switching coefficients[J]. IEEE Trans.on Automatic Control, 1998, 33 (8): 780- 783. |
| 20 | OGLE T L, BLAIR W D. Design of IMM estimators with nearly constant velocity modes for tracking maneuvering targets[C]//Proc. of the IEEE Aerospace Conference, 2017. |
| 21 |
CHEN B , TUGNAIT J K . Interacting multiple model fixed-lag smoothing algorithm for Markovian switching systems[J]. IEEE Trans.on Aerospace and Electronic Systems, 2000, 36 (1): 243- 250.
doi: 10.1109/7.826326 |
| 22 |
MORELANDE M R , RISTIC B . Smoothed state estimation for nonlinear Markovian switching systems[J]. IEEE Trans.on Aerospace and Electronic Systems, 2008, 44 (4): 1309- 1325.
doi: 10.1109/TAES.2008.4667711 |
| 23 |
MORELANDE M R , CHALLA S . Maneuvering target tracking in clutter using particle filters[J]. IEEE Trans.on Aerospace and Electronic Systems, 2005, 41 (1): 252- 270.
doi: 10.1109/TAES.2005.1413760 |
| 24 | KIM B D, LEE J S. IMM algorithm based on the analytic solution of steady state Kalman filter for radar target tracking[C]//Proc. of the IEEE International Radar Conference, 2005: 757-762. |
| 25 | 张俊根, 姬红兵. IMM迭代扩展卡尔曼粒子滤波跟踪算法[J]. 电子与信息学报, 2010, 32 (5): 1116- 1120. |
| ZHANG J G , JI H B . IMM Iterated extended kalman particle filter based target tracking[J]. Journal of Electronics and Information Technology, 2010, 32 (5): 1116- 1120. | |
| 26 |
许红, 谢文冲, 袁华东, 等. 基于自适应的增广状态-交互式多模型的机动目标跟踪算法[J]. 电子与信息学报, 2020, 42 (11): 2749- 2755.
doi: 10.11999/JEIT190516 |
|
XU H , XIE W C , YUN H D , et al. Maneuvering target tracking algorithm based on the adaptive augmented state interracting multiple model[J]. Journal of Electronics and Information Technology, 2020, 42 (11): 2749- 2755.
doi: 10.11999/JEIT190516 |
|
| 27 | 叶瑾, 许枫, 杨娟, 等. 一种基于多传感器的复合量测IMM-EKF数据融合算法[J]. 电子学报, 2020, 48 (12): 2326- 2330. |
| YE J , XU F , YANG J , et al. A composite measurement IMM-EKF data fusion algorithm based on multi-sensor[J]. Acta Electronica Sinica, 2020, 48 (12): 2326- 2330. | |
| 28 | BAR-SHALOM Y , LI X R , KIRUBARAJAN T . Estimation with applications to tracking and navigation: theory algorithms and software[M]. New York: Wiley, 2001. |
| 29 | BAR-SHALOM Y , WILLETT P K , TIAN X . Tracking and data fusion: a handbook of algorithms[M]. Storrs: YBS Publishing, 2011. |
| 30 | TICHAVSKY P , MURAVCHIK C , NEHORAI A . Posterior Cramer-Rao bounds for discrete-time nonlinear filtering[J]. IEEE Trans.on Aerospace and Electronic Systems, 1998, 46 (5): 1386- 1396. |
| [1] | Yunhua RAO, Hualiang ZHU, Zhijie ZHENG. Direct position determination of transmitter based on cooperative target in passive radar [J]. Systems Engineering and Electronics, 2023, 45(2): 394-400. |
| [2] | Jun ZHANG, Xinyu ZHANG, Weidong JIANG, Yongxiang LIU, Xiang LI. Fast DOA estimation method using generalized approximate message passing [J]. Systems Engineering and Electronics, 2022, 44(10): 2995-3002. |
| [3] | Weijie ZHAN, Xianrong WAN, Jianxin YI, Deqiang XIE, Feng CHENG, Yunhua RAO. Experimental study on micro-Doppler effect of target blades in passive radar [J]. Systems Engineering and Electronics, 2021, 43(6): 1468-1476. |
| [4] | Yuqi LIU, Xianrong WAN, Jianxin YI, Hengyu KE. Clutter suppression method for passive radar based on channel Doppler characteristic [J]. Systems Engineering and Electronics, 2021, 43(1): 55-61. |
| [5] | Donghua HUANG, Yongsheng ZHAO, Yongjun ZHAO. Target localization algorithm from DOA-TDOA measurements in passive radar with transmitter and receiver position errors [J]. Systems Engineering and Electronics, 2020, 42(9): 1961-1968. |
| [6] | Chunming ZHAO, Yueming YAO, Wen JIN, Weiyang SONG, Haihong FANG. Design of terminal guidance system for strapdown passive radar [J]. Systems Engineering and Electronics, 2020, 42(11): 2607-2613. |
| [7] | HU Panhe, BAO Qinglong, CHEN Zengping. Detection method of passive radar weak targets based on probability histogram [J]. Systems Engineering and Electronics, 2018, 40(6): 1227-1232. |
| [8] | L Min, WAN Xianrong, YI Jianxin, CHENG Feng. New method of target track maintenance in single frequency network based passive radar [J]. Systems Engineering and Electronics, 2017, 39(9): 1965-1970. |
| [9] | ZHU Yun, WANG Jun, XING Yushuai, L Xiaoyong. Adaptive receiver selection for passive radar network [J]. Systems Engineering and Electronics, 2017, 39(11): 2441-2447. |
| [10] | WAN Xian-, SHAO Qi-hong, XIA Peng, DAN Yang-peng. Experimentation on micro-Doppler effect with passive radar based on digital terrestrial multimedia broadcasting [J]. Systems Engineering and Electronics, 2016, 38(11): 2499-2504. |
| [11] | LI Wan-chun, TIAN Zheng-wu, TANG Qiu, WANG Bin, LI Ying-xiang. Passive radar parameter estimation without reference channel [J]. Systems Engineering and Electronics, 2016, 38(11): 2530-2536. |
| [12] | ZHUANG Xu-sheng,WANG Ling. Moving target imaging method for passive radar applicable to non-cooperative illumination sources [J]. Systems Engineering and Electronics, 2015, 37(3): 560-565. |
| [13] | FANG Liang, GONG Zi-ping, WAN Xian-rong, FANG Gao, CHENG Feng. Calibration algorithm using array rotation in passive radar [J]. Systems Engineering and Electronics, 2015, 37(11): 2467-2473. |
| [14] | WAN Xianrong, YI Jianxin, FANG Gao, FU Yan, KE Hengyu. Experimental research of digital television based threedimensional passive radar [J]. Systems Engineering and Electronics, 2014, 36(7): 1263-1268. |
| [15] | CHEN Tao,HAN Qiang-qiang,LIU Lu-tao,LIN Jin-qiu. Improved wideband direction finding algorithm based on cross-spectra [J]. Systems Engineering and Electronics, 2014, 36(5): 879-883. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||