Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (10): 3218-3227.doi: 10.12305/j.issn.1001-506X.2025.10.09
• Sensors and Signal Processing • Previous Articles
Low-altitude multi-target tracking algorithm in non-uniform clutter environment
Lina SHANG( ), Mei DONG(), Baixiao CHEN()
), Mei DONG(), Baixiao CHEN()
- National Key Laboratory of Radar Signal Processing,Xidian University,Xi’an 710071,China
-
Received:2024-08-09Online:2025-10-25Published:2025-10-23 -
Contact:Mei DONG E-mail:2609361287@qq.com;dmei2006@xidian.edu.cn;bxchen@xidian.edu.cn
CLC Number:
Cite this article
Lina SHANG, Mei DONG, Baixiao CHEN. Low-altitude multi-target tracking algorithm in non-uniform clutter environment[J]. Systems Engineering and Electronics, 2025, 47(10): 3218-3227.
share this article
Table 1
Clutter model parameter table"
| 模型 | 权重 | 均值/(m, rad, rad) | 协方差矩阵/ |
| 1 | 0.5 | — | — |
| 2 | 0.3 | ||
| 3 | 0.2 |

Fig.1
Flowchart of C-Label-UK-PHD algorithm"
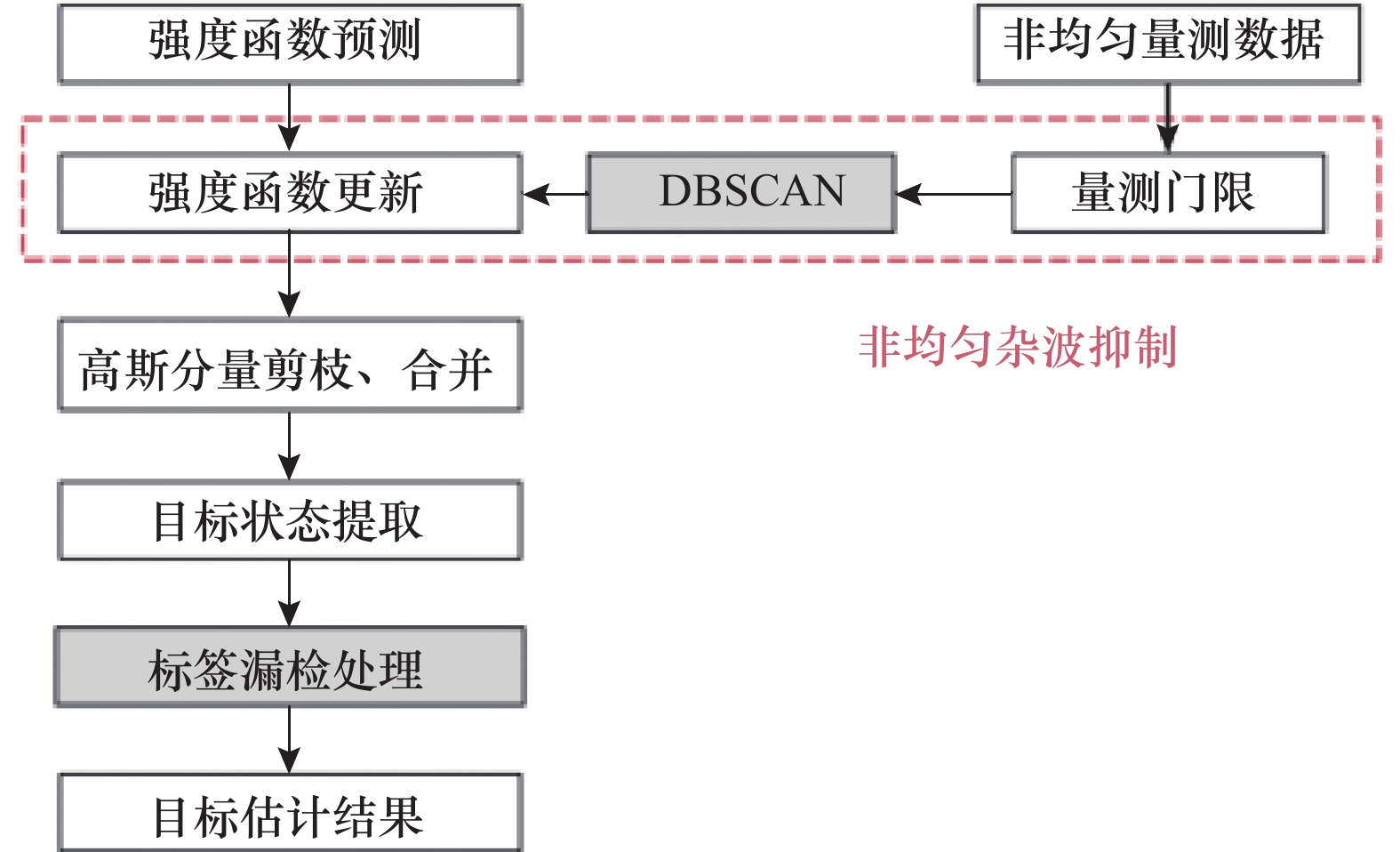
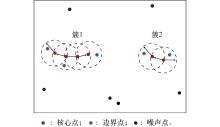
Fig.2
Diagram of DBSCAN algorithm"
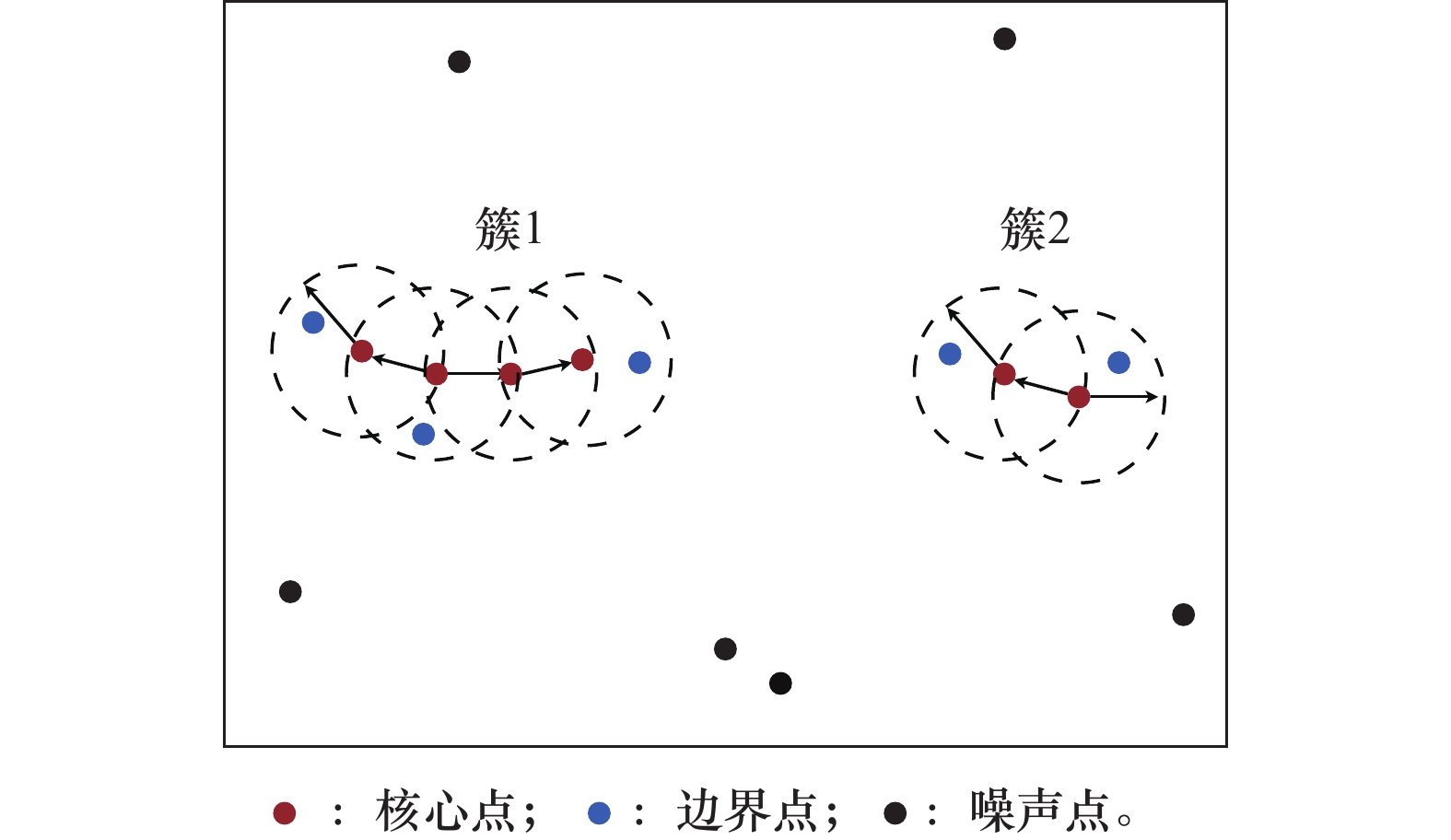

Fig.3
Label tree structure"
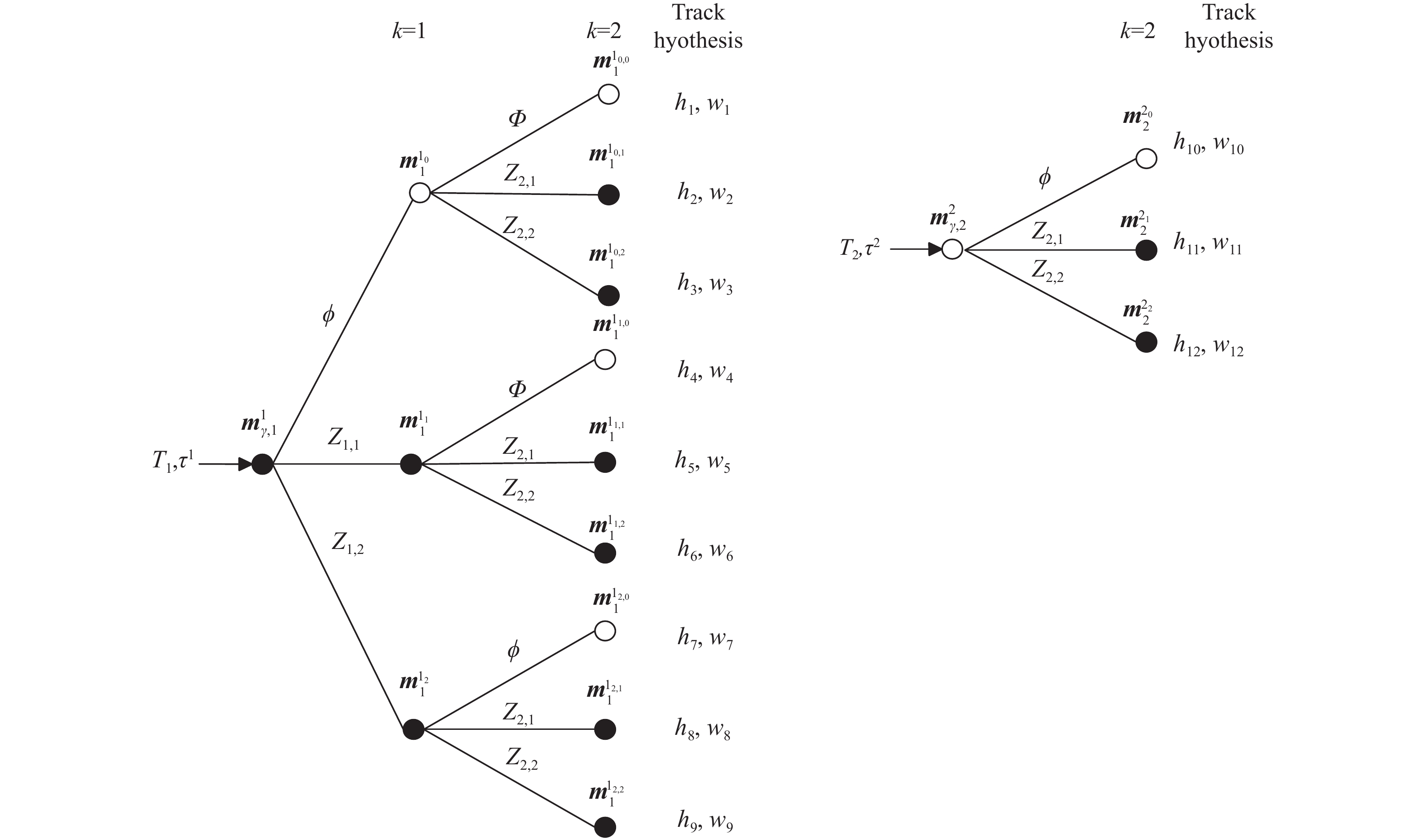
Table 2
Initial states and start/end time of each target"
| 目标 | 起始时间/s | 终止时间/s | 初始状态(m, m/s, m, m/s, m, m/s, rad/s) |
| 1 | 1 | 100 | ( |
| 2 | 10 | 100 | ( − |
| 3 | 20 | 80 | ( 350, 11, 750, 5, 350, −3, π/90/4 ) |
| 4 | 40 | 90 | ( −250, −12, |
| 5 | 40 | 100 | ( |

Fig.4
Multi-object motion real trajectories"
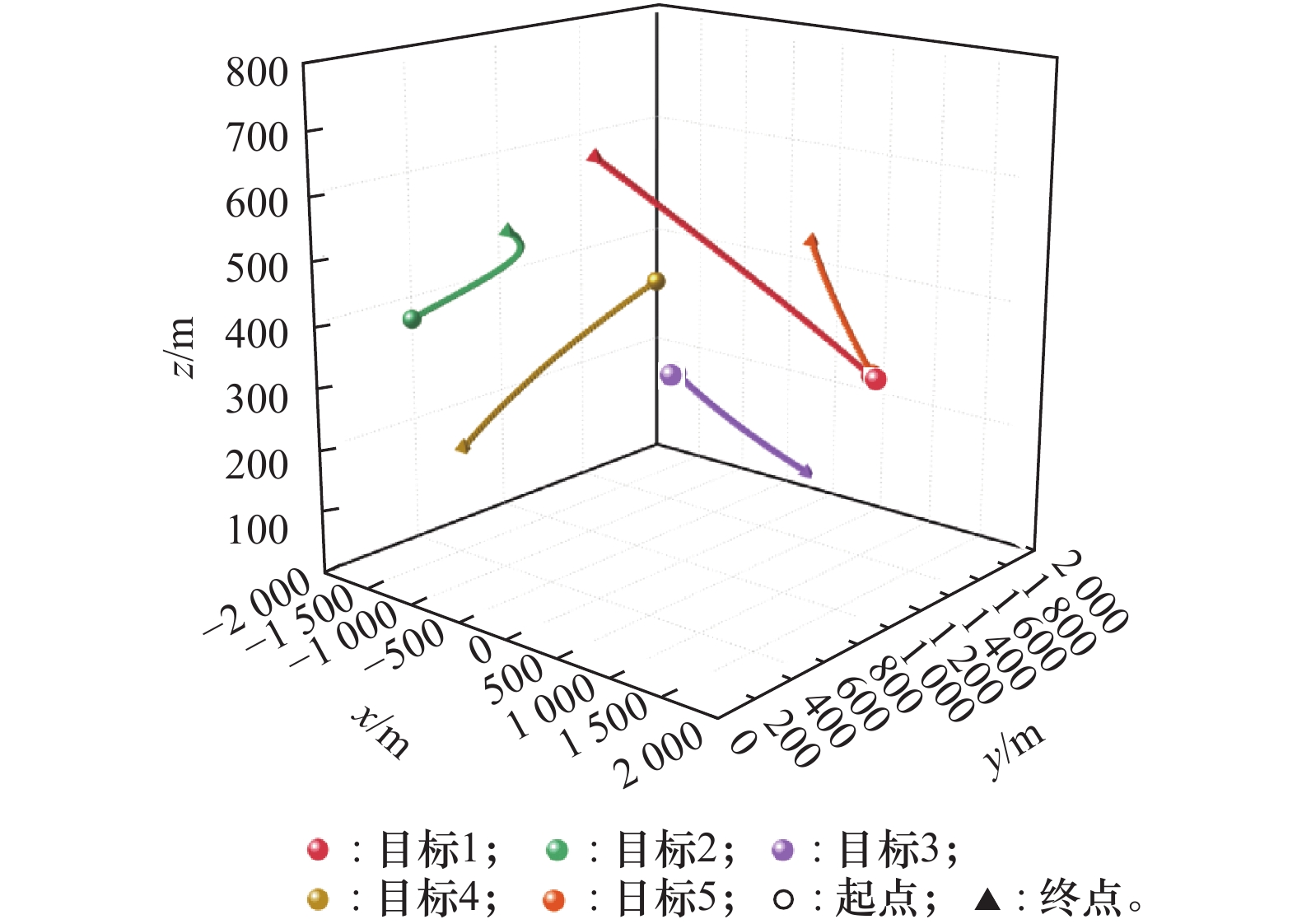

Fig.5
FMM clutter distribution"
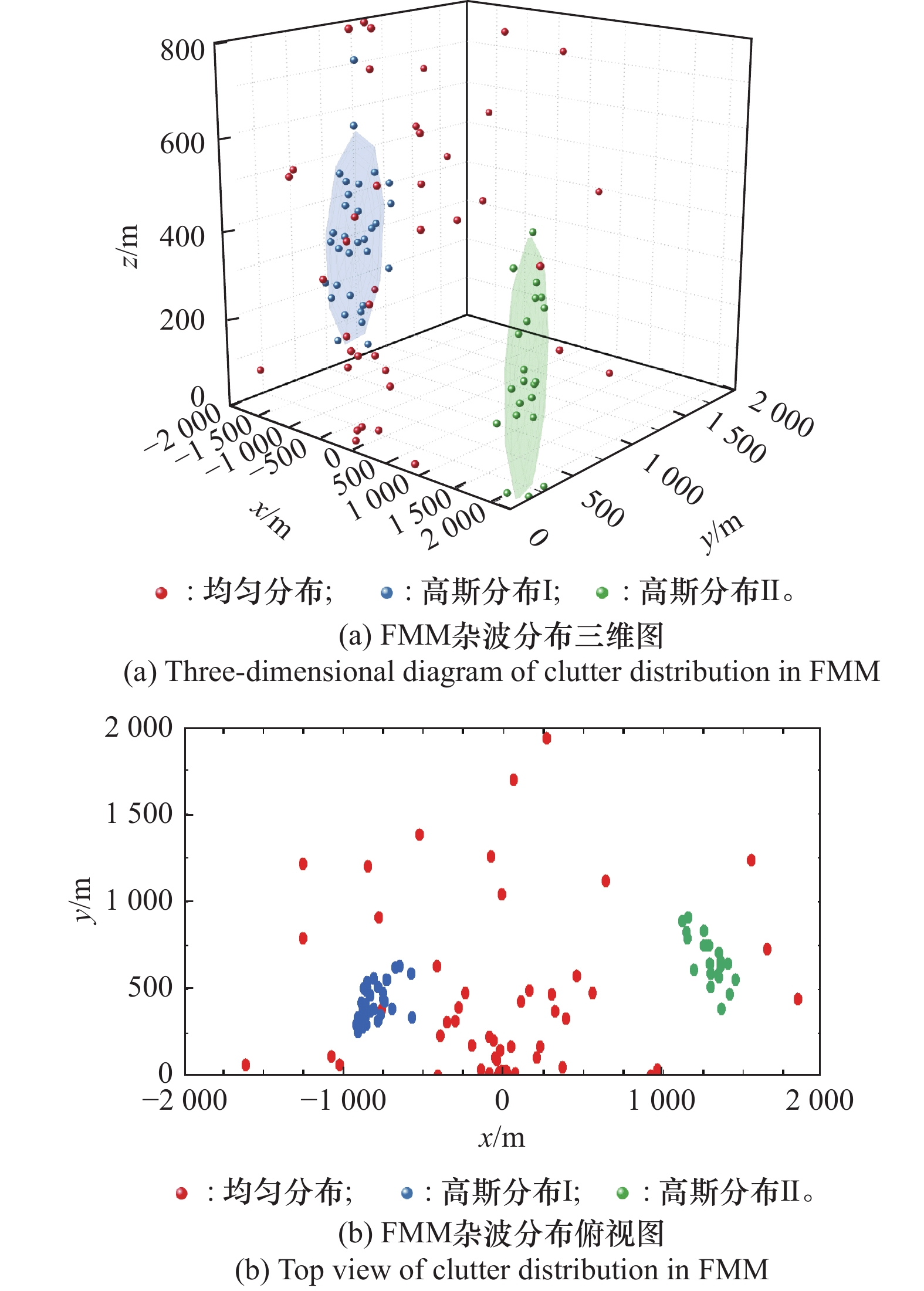
Fig.6
Target estimation before non-uniform clutter suppression"
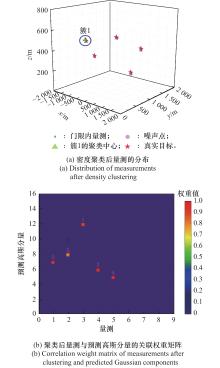
Fig.7
Target estimation after non-uniform clutter suppression"
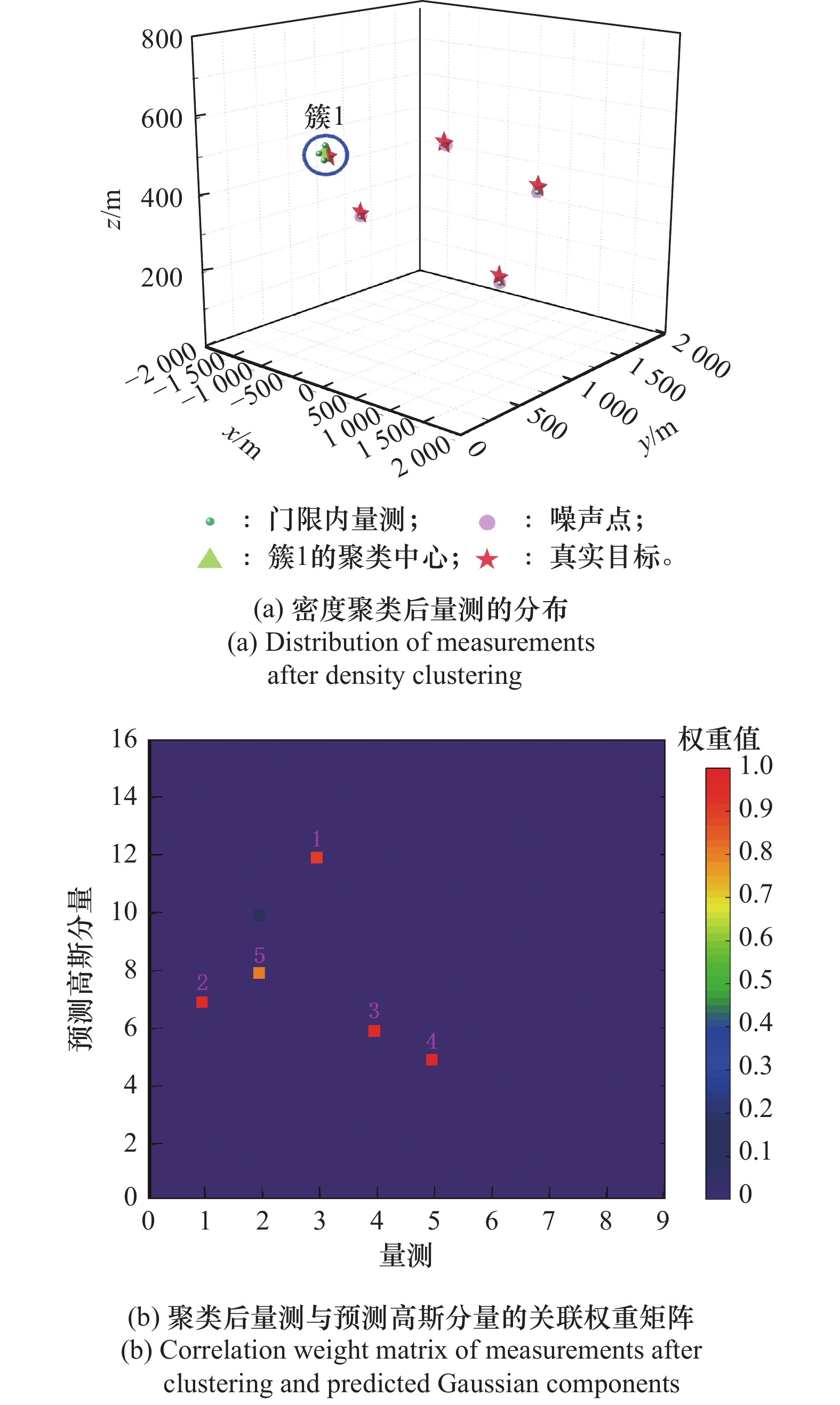
Fig.8
Target state estimation"


Fig.9
Target number estimation"
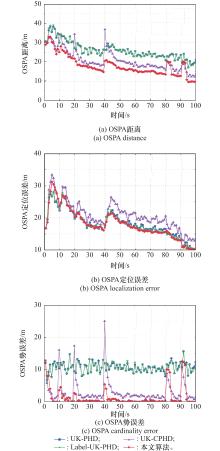
Fig.10
OSPA in uniform clutter"
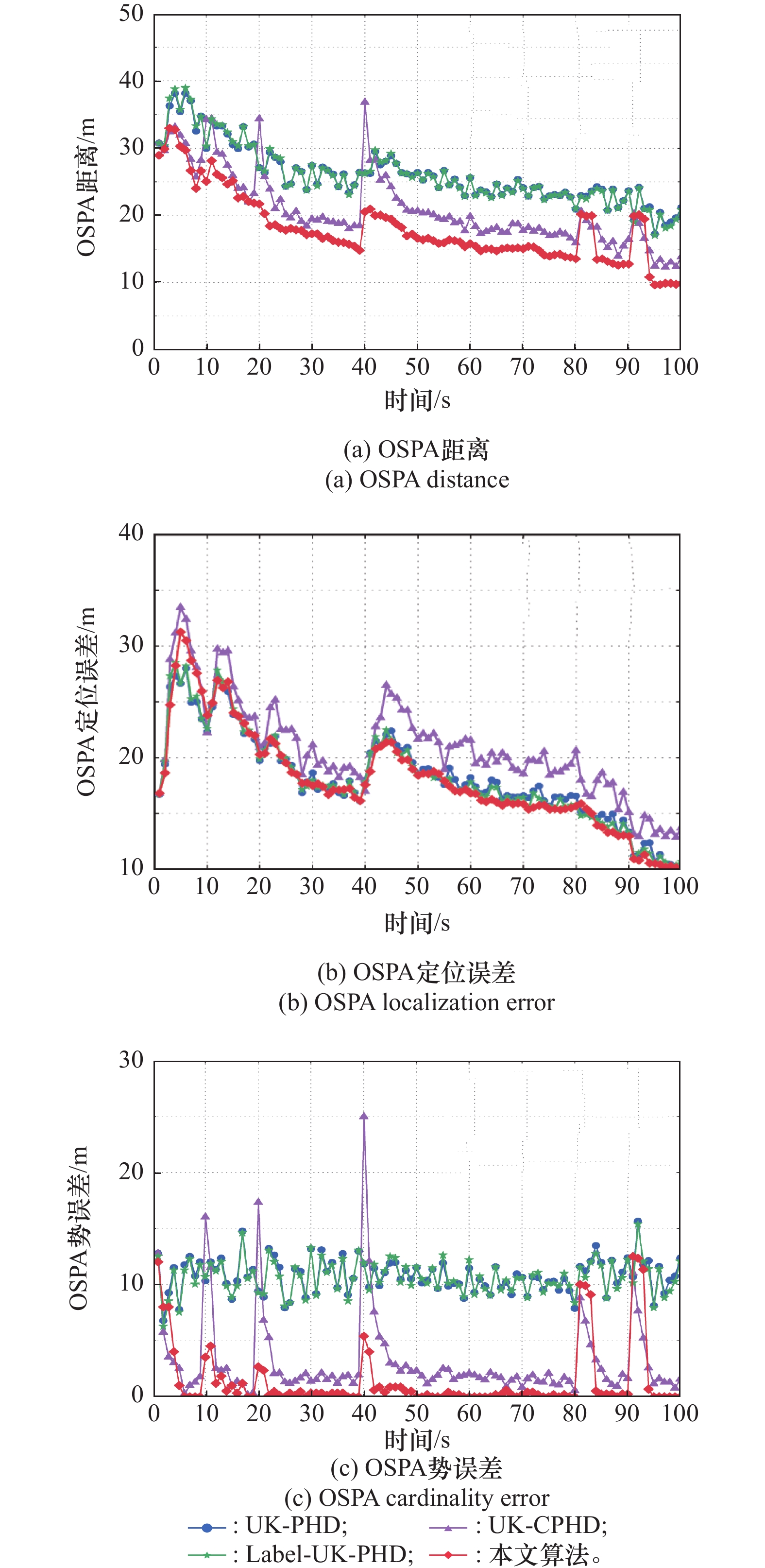
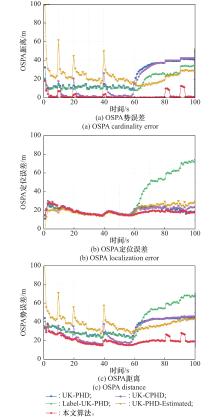
Fig.11
OSPA in non-uniform clutter"
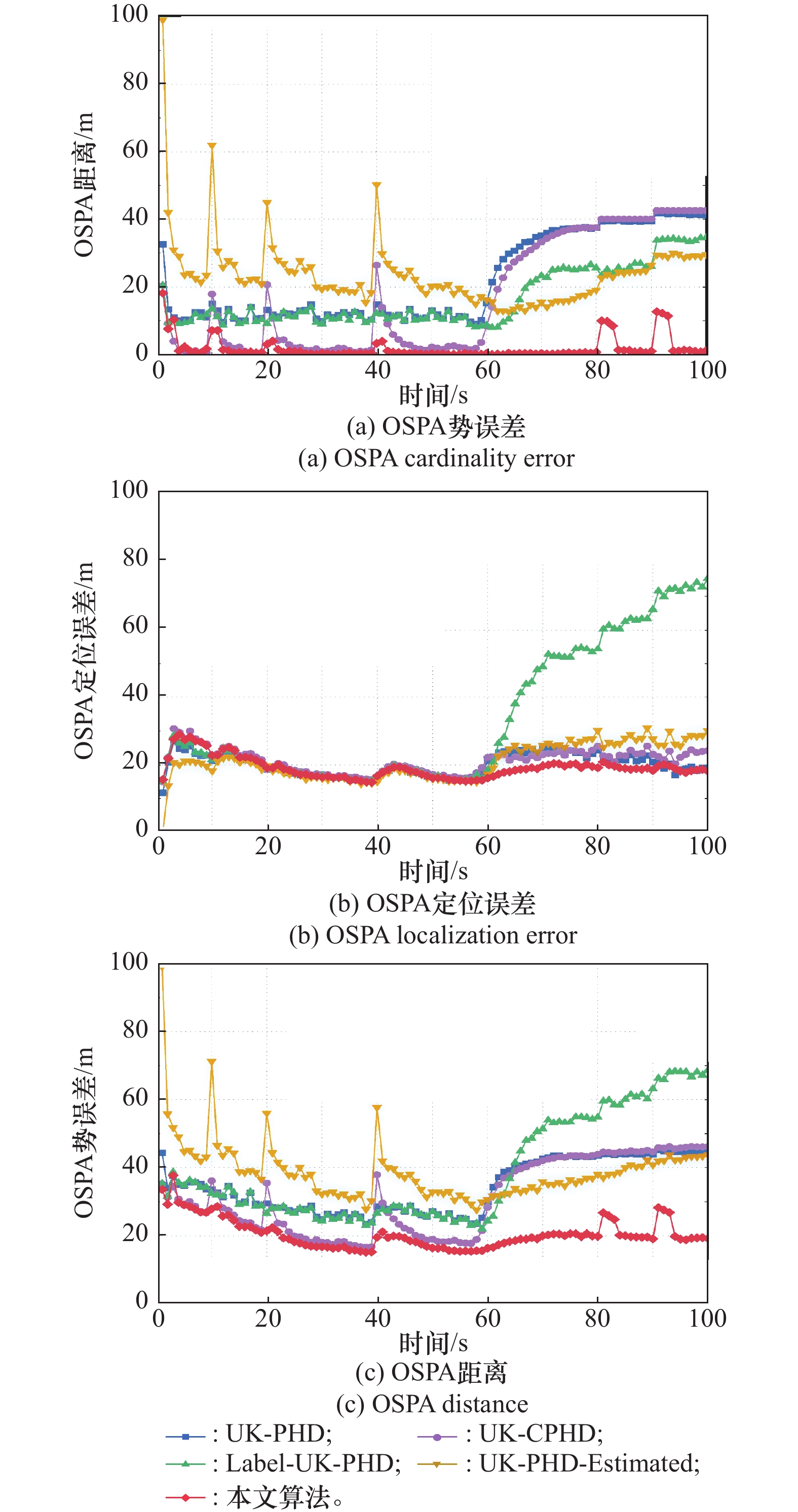
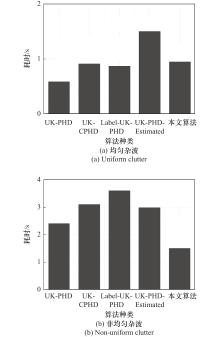
Fig.12
Running time"
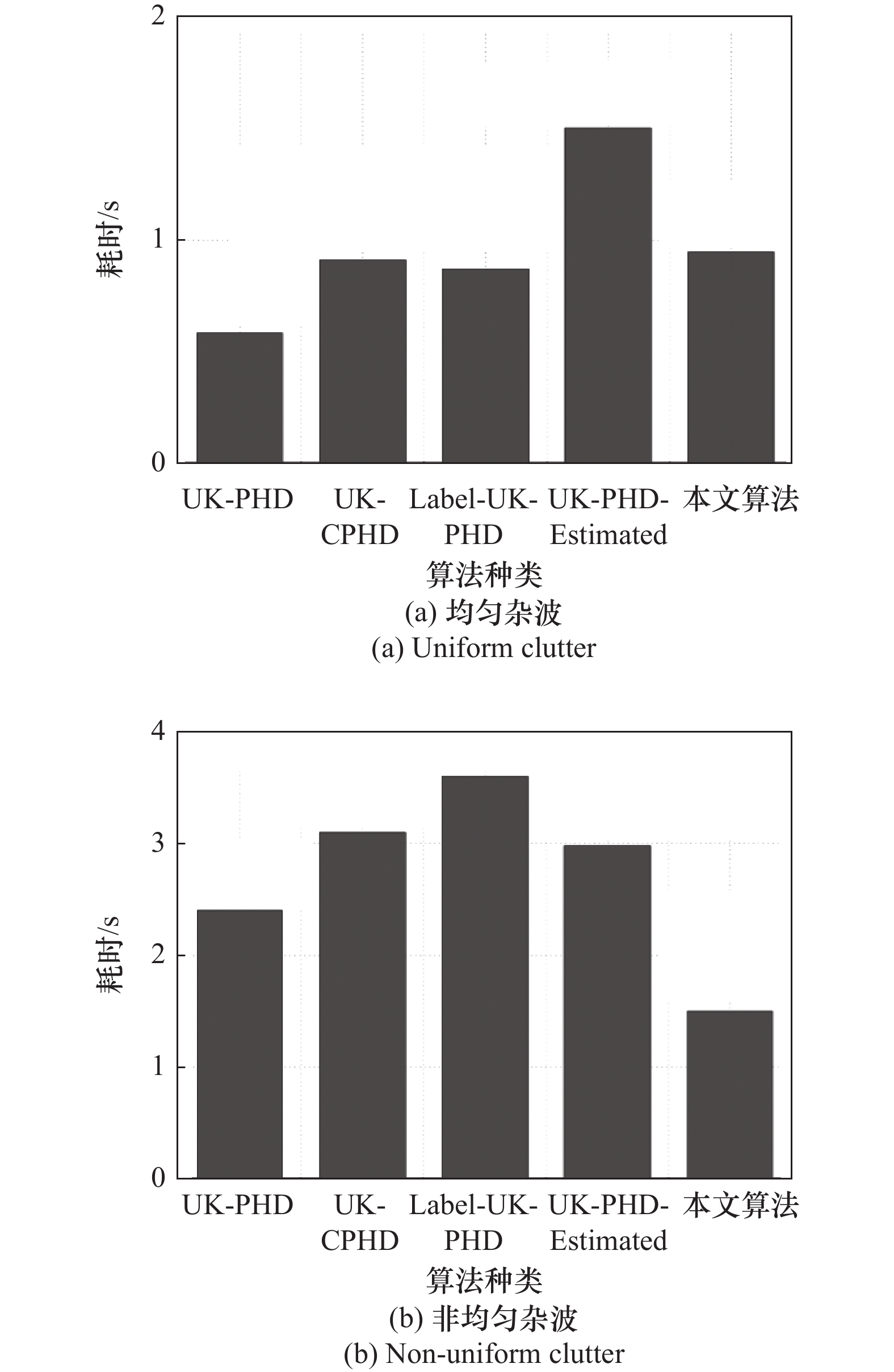
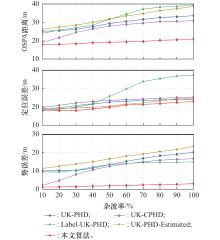
Fig.13
Performance of the algorithm under clutter rate variation"
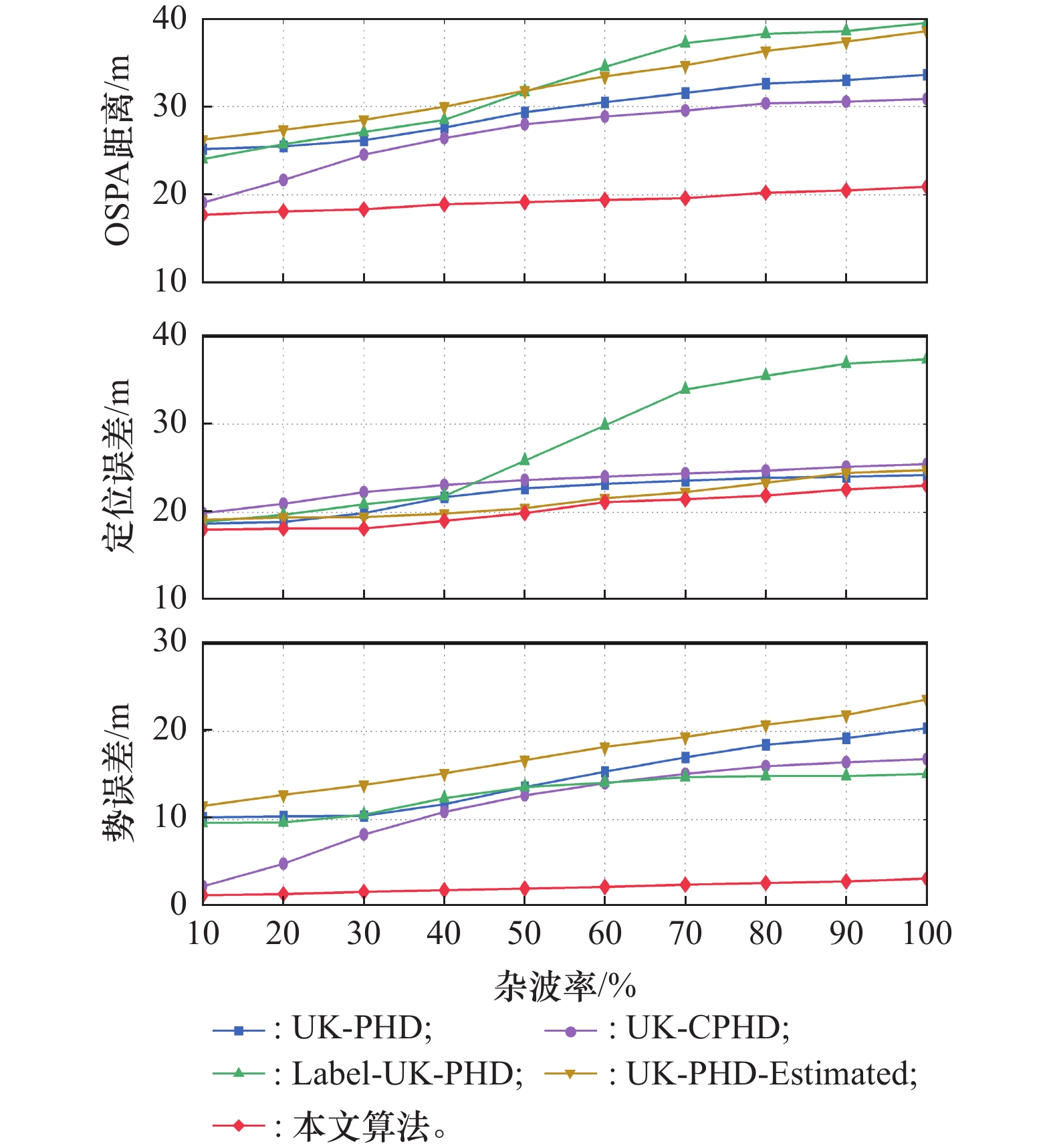

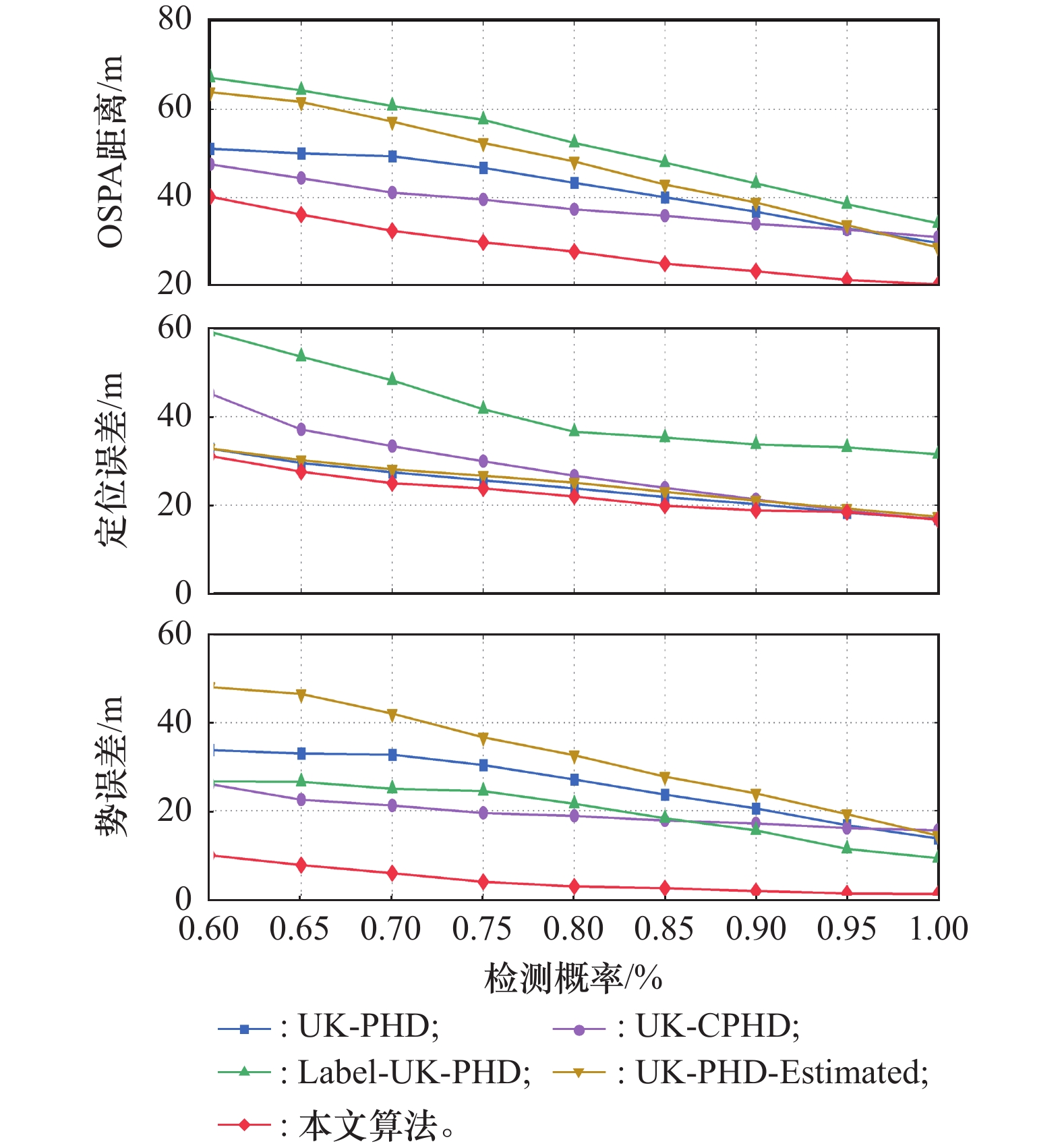
Fig.14
Performance of the algorithm under detection probability variation"
| 1 | 权在昕, 武丁杰, 高嘉静, 等. 城市低空空中交通及无人机路径规划研究综述[J]. 航空计算技术, 2024, 54(2): 121−126. |
| QUAN Z X, WU D J, GAO J J, et al. Overview of urban low altitude air mobility and UAV path planning[J]. Aeronautical Computing Technique, 2024, 54(2): 121−126. | |
| 2 | 冯杨, 蒋超, 崔玉伟. 俄乌冲突中无人机作战运用及启示[J]. 中国军转民, 2022, (23): 35- 40. |
| FENG Y, JIANG C, CUI Y W. The application and enlightenment of UAVs in Russia-Ukraine conflict[J]. Defense Industry Conversion in China, 2022, (23): 35- 40. | |
| 3 |
LI X R, BAR-SHALOM Y. Tracking in clutter with nearest neighbor filters: analysis and performance[J]. IEEE Trans. on Aerospace and Electronic Systems, 1996, 32 (3): 995- 1010.
doi: 10.1109/7.532259 |
| 4 |
REID D. An algorithm for tracking multiple targets[J]. IEEE Trans. on Automatic Control, 1979, 24 (6): 843- 854.
doi: 10.1109/TAC.1979.1102177 |
| 5 |
FORTMANN T, BAR-SHALOM Y, SCHEFFE M. Sonar tracking of multiple targets using joint probabilistic data association[J]. IEEE Journal of Oceanic Engineering, 1983, 8 (3): 173- 184.
doi: 10.1109/JOE.1983.1145560 |
| 6 | MAHLER R. Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Trans. on Aerospace and Electronic Systems, 2003, 39 (4): 1152- 1178. |
| 7 |
VO B N, MA W K. The Gaussian mixture probability hypothesis density filter[J]. IEEE Trans. on Signal Processing, 2006, 54 (11): 4091- 4104.
doi: 10.1109/TSP.2006.881190 |
| 8 |
PANTA K, CLARK D E, VO B N. Data association and track management for the Gaussian mixture probability hypothesis density filter[J]. IEEE Trans. on Aerospace and Electronic Systems, 2009, 45 (3): 1003- 1016.
doi: 10.1109/TAES.2009.5259179 |
| 9 |
VO B T, VO B N, CANTONI A. Analytic implementations of the cardinalized probability hypothesis density filter[J]. IEEE Trans. on Signal Processing, 2007, 55 (7): 3553- 3567.
doi: 10.1109/TSP.2007.894241 |
| 10 |
WOOD T M, YATES C A, WILKINSON D A, et al. Simplified multitarget tracking using the PHD filter for microscopic video data[J]. IEEE Trans. on Circuits and Systems for Video Technology, 2012, 22 (5): 702- 713.
doi: 10.1109/TCSVT.2011.2177937 |
| 11 |
GRANSTROM K, ORGUNER U. A PHD filter for tracking multiple extended targets using random matrices[J]. IEEE Trans. on Signal Processing, 2012, 60 (11): 5657- 5671.
doi: 10.1109/TSP.2012.2212888 |
| 12 |
LIAN F, HAN C Z, LIU W F. Estimating unknown clutter intensity for PHD filter[J]. IEEE Trans. on Aerospace and Electronic Systems, 2010, 46 (4): 2066- 2078.
doi: 10.1109/TAES.2010.5595616 |
| 13 |
LIU W F, CHEN Y M, CUI H L, et al. A nonuniform clutter intensity estimation algorithm for random finite set filters[J]. IEEE Trans. on Aerospace and Electronic Systems, 2018, 54 (6): 2911- 2925.
doi: 10.1109/TAES.2018.2832958 |
| 14 |
CHEN X, THARMARASA R, PELLETIER M, et al. Integrated clutter estimation and target tracking using Poisson point processes[J]. IEEE Trans. on Aerospace and Electronic Systems, 2012, 48 (2): 1210- 1235.
doi: 10.1109/TAES.2012.6178058 |
| 15 | 马艳琴, 陆耀宾, 李向前, 等. 幅度信息辅助的海面低空多目标多假设跟踪算法[J]. 现代雷达, 2024, 46 (3): 9- 15. |
| MA Y Q, LU Y B, LI X Q, et al. Amplitude information aided multiple hypothesis tracking algorithm for low altitude marine multi-target at sea[J]. Modern Radar, 2024, 46 (3): 9- 15. | |
| 16 | 陈华志. 基于雷达/红外数据融合多目标跟踪滤波算法的研究[D]. 成都: 电子科技大学, 2011. |
| CHEN H Z. A multitarget tracking algorithm based on radar and infrared sensor data fusion[D]. Chengdu: University of Electronic Science and Technology of China, 2011. | |
| 17 | 江玉玲, 熊振南, 唐基宏. 基于轨迹段DBSCAN的船舶轨迹聚类算法[J]. 中国航海, 2019, 42 (3): 1- 5. |
| JIANG Y L, XIONG Z N, TANG J H. Ship trajectory clustering algorithm based on DBSCAN[J]. Navigation of China, 2019, 42 (3): 1- 5. | |
| 18 | 卢鹏博. 基于随机有限集的多目标跟踪算法研究[D]. 哈尔滨: 哈尔滨工程大学, 2022. |
| LU P B, Research on multi-target tracking algorithm based on random finite set[D]. Harbin: Harbin Engineering University, 2022. | |
| 19 | 刘政玮, 陈映, 鲁耀兵. 一种强杂波密度环境下的多目标跟踪算法[J]. 现代雷达, 2022, 44 (2): 16- 22. |
| LIU Z W, CHEN Y, LU Y B. A multi-target tracking algorithm under strong clutter density environment[J]. Modern Radar, 2022, 44 (2): 16- 22. | |
| 20 |
SCHUHMACHER D, VO B T, VO B N. A consistent metric for performance evaluation of multi-object filters[J]. IEEE Trans. on Signal Processing, 2008, 56 (8): 3447- 3457.
doi: 10.1109/TSP.2008.920469 |
| [1] | Jiazheng FU, Yuxia GUO, Boxiang ZHANG, Lei CHAI, Wei YI, Lingjiang KONG. Distributed multi-target tracking method based on TPHD and TCPHD filters [J]. Systems Engineering and Electronics, 2025, 47(9): 2828-2838. |
| [2] | Xiaomeng MA, Dongming DENG, Yongjian SHEN, Jinshan DING, Guoqing HAO. Multi-target tracking method based on single observer passive motion location [J]. Systems Engineering and Electronics, 2025, 47(8): 2549-2557. |
| [3] | Hongyuan ZHANG, Baichun GONG, Fei HAN, Yue SUN, Xin NING. Space-based passive cooperative multi-target initial orbit determination method in complex environments [J]. Systems Engineering and Electronics, 2025, 47(5): 1404-1413. |
| [4] | Zhikang JI, Zinan ZHOU, Xuanpeng LI. Self-constrained search density based clustering algorithm for radar signal sorting [J]. Systems Engineering and Electronics, 2025, 47(1): 62-69. |
| [5] | Jingyuan SHAN, Yu LU, Hanyu LING. Robust adaptive multi-target tracking algorithm for airborne passive bistatic radar [J]. Systems Engineering and Electronics, 2024, 46(9): 2902-2915. |
| [6] | Wei WU, Bing XUE, Dandan LIU. Target and sea clutter identification algorithm based on Tri-feature training [J]. Systems Engineering and Electronics, 2024, 46(9): 2935-2940. |
| [7] | Linhai JIANG, Baichun GONG, Chuankai LIU, Yang YANG, Renyong ZHANG. Space multi-target tracking method for space-based distributedpassive detection [J]. Systems Engineering and Electronics, 2024, 46(8): 2789-2797. |
| [8] | Siyi YAO, Wanchun LI, Lin GAO, Huaguo ZHANG, Hangwei HU. Multi-sensor multi-target tracking based on distributed PMHT [J]. Systems Engineering and Electronics, 2024, 46(7): 2184-2190. |
| [9] | Mengyun AN, Jiapeng YIN, Jiankai HUANG, Yongzhen LI, Xuesong WANG. A method for signal reconstruction of polarization-Doppler weather radar based on spectral continuity [J]. Systems Engineering and Electronics, 2024, 46(7): 2285-2293. |
| [10] | Yiqiong YANG, Jianxin WU, Yi LIANG. Airborne bistatic radar beam domain clutter suppression method [J]. Systems Engineering and Electronics, 2024, 46(6): 1935-1945. |
| [11] | Yaling ZHUO, Xiang LI, Lei ZUO, Juan HU. Power allocation algorithm with random data packet loss in netted radar [J]. Systems Engineering and Electronics, 2024, 46(6): 1957-1966. |
| [12] | Meibin QI, Shuo ZHUANG, Jingjing HU, Yanfang YANG, Yuankui HU. Resolvable group target tracking based on joint GLMB filter [J]. Systems Engineering and Electronics, 2024, 46(4): 1212-1219. |
| [13] | Shuya ZENG, Bin RAO. Ballistic target association method based on dynamic conservation law [J]. Systems Engineering and Electronics, 2024, 46(2): 684-691. |
| [14] | An'an WANG, Wenchong XIE, Yongliang WANG. Bistatic airborne radar clutter suppression method based on sparse recovery [J]. Systems Engineering and Electronics, 2024, 46(2): 517-525. |
| [15] | Jiayi LUO, Xuanpeng LI, Jianghao LI, Qifan XUE, Feng YANG, Weigong ZHANG. Radiation signal sorting method based on PDW multi-feature fusion [J]. Systems Engineering and Electronics, 2024, 46(1): 80-87. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||