Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (9): 2902-2915.doi: 10.12305/j.issn.1001-506X.2024.09.02
• Electronic Technology • Previous Articles Next Articles
Robust adaptive multi-target tracking algorithm for airborne passive bistatic radar
Jingyuan SHAN1, Yu LU2,*, Hanyu LING3
- 1. International School, Beijing University of Posts and Telecommunications, Beijing 100876, China
2. Naval Aviation University, Yantai 264001, China
3. Unit 91917 of the PLA, Beijing 102401, China
-
Received:2023-11-22Online:2024-08-30Published:2024-09-12 -
Contact:Yu LU
CLC Number:
Cite this article
Jingyuan SHAN, Yu LU, Hanyu LING. Robust adaptive multi-target tracking algorithm for airborne passive bistatic radar[J]. Systems Engineering and Electronics, 2024, 46(9): 2902-2915.
share this article

Fig.1
Geometric illustration of APBR in a two-dimensional space"


Fig.2
Flowchart of standard LMB filter"


Fig.3
Flowchart of RA-LMB filter"

Table 1
Initial states of target, transmitter and airborne receiver (simulation scenario 1)"
| 仿真对象 | 初始状态 | 存活时段/s |
| 目标1 | (-14 950 m, 150 m/s, 12 550 m, -65 m/s) | 1~90 |
| 目标2 | (-15 050 m, 120 m/s, 12 450 m, -15 m/s) | 5~100 |
| 目标3 | (10 550 m, -25 m/s, 16 550 m, 100 m/s) | 10~90 |
| 目标4 | (10 450 m, -130 m/s, 16 550 m, -85 m/s) | 10~75 |
| 目标5 | (5 950 m, -100 m/s, 4 450 m, 120 m/s) | 15~80 |
| 目标6 | (6 050 m, -140 m/s, 4 450 m, 80 m/s) | 20~75 |
| 目标7 | (-12 450 m, 150 m/s, 5 950 m, 80 m/s) | 30~90 |
| 目标8 | (-12 550 m, 120 m/s, 6 050 m, 20 m/s) | 50~100 |
| T1 | (0 m, 0 m/s, 18 000 m, 0 m/s) | - |
| T2 | (15 000 m, 0 m/s, 10 000 m, 0 m/s) | - |
| T3 | (-15 000 m, 0 m/s, 1 000 m, 0 m/s) | - |
| R | (-10 000 m, 200 m/s, 1 000 m, 10 m/s) | - |

Fig.4
Scenario of APBR tracking multiple targets with uniform linear motion"


Fig.5
Estimation results of clutter rate and detection probability (simulation scenario 1)"
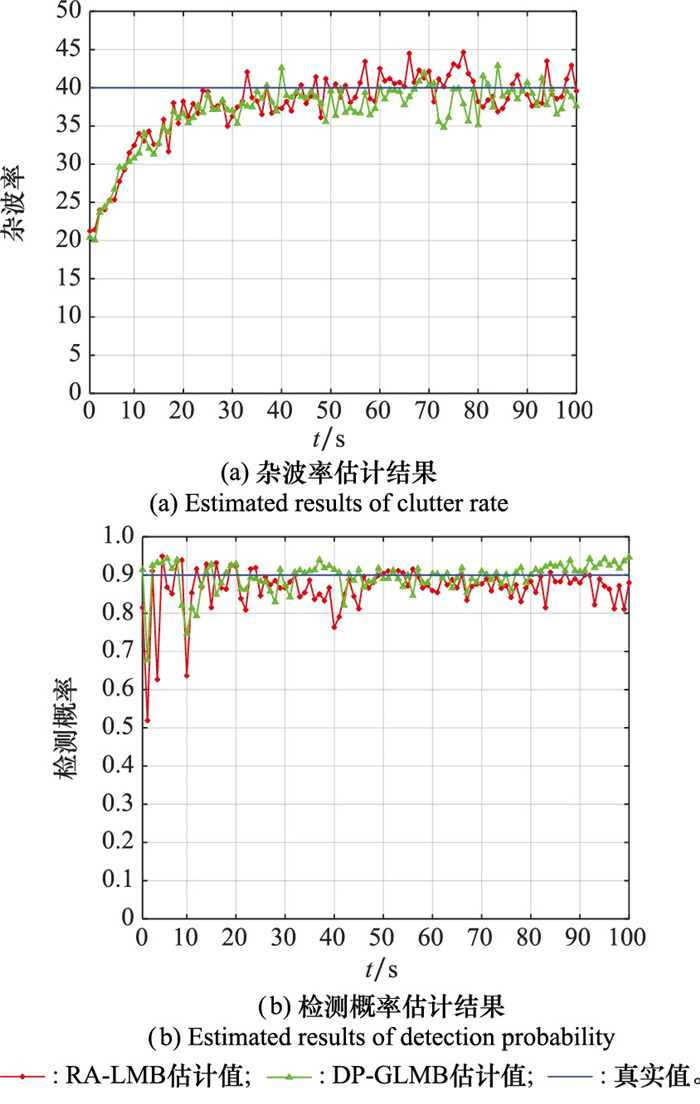
Table 2
Mean of estimated clutter rate and target detection probability (simulation scenario 1)"
| 算法 | 杂波率估计平均值 | 检测概率估计平均值 |
| RA-LMB | 37.67 | 0.89 |
| DP-GLMB | 36.75 | 0.86 |
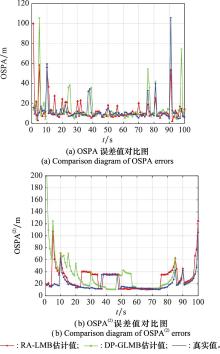
Fig.6
Comparison of OSPA and OSPA(2) errors (simulation scenario 1)"


Fig.7
Comparison of estimated target number for different filters (simulation scenario 1)"

Table 3
Initial states of target, transmitter and airborne receiver (simulation scenario 2)"
| 仿真对象 | 初始状态 | 转弯率(rad/s) | 存活时段/s |
| 目标1 | (-14 950 m, 150 m/s, 12 550 m, -65 m/s) | π/1 080 | 1~90 |
| 目标2 | (-15 050 m, 120 m/s, 12 450 m, -15 m/s) | π/360 | 5~100 |
| 目标3 | (10 550 m, -25 m/s, 16 550 m, -100 m/s) | π/1 080 | 10~90 |
| 目标4 | (10 450 m, -130 m/s, 16 550 m, -85 m/s) | -π/360 | 10~75 |
| 目标5 | (5 950 m, -100 m/s, 4 450 m, 120 m/s) | -π/1 080 | 15~80 |
| 目标6 | (6 050 m, -140 m/s, 4 450 m, 80 m/s) | π/270 | 20~75 |
| 目标7 | (-12 450 m, 150 m/s, 5 950 m, 80 m/s) | -π/540 | 30~90 |
| 目标8 | (-12 550 m, 120 m/s, 6 050 m, 120 m/s) | π/180 | 50~100 |
| T1 | (0 m, 0 m/s, 18 000 m, 0 m/s) | — | - |
| T2 | (15 000 m, 0 m/s, 10 000 m, 0 m/s) | — | - |
| T3 | (-15 000 m, 0 m/s, 1 000 m, 0 m/s) | — | - |
| R | (-10 000 m, 200 m/s, 1 000 m, 10 m/s) | — | - |
Fig.8
Scenario of APBR tracking multiple targets with CT motion"
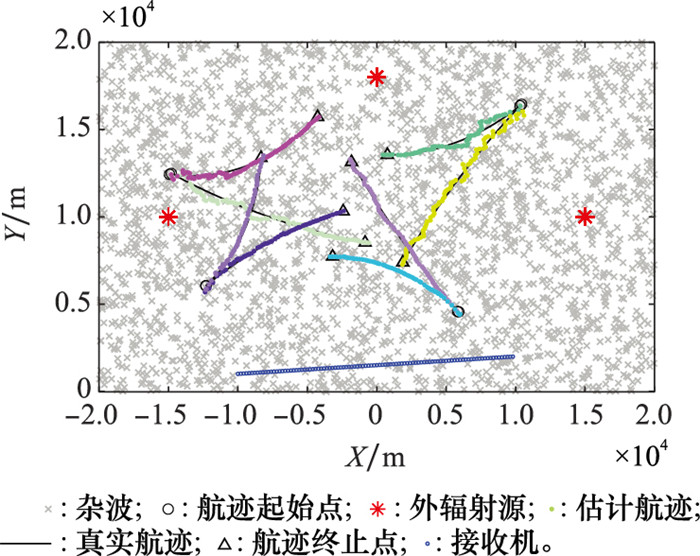

Fig.9
Estimation results of clutter rate and detection probability (simulation scenario 2)"

Table 4
Mean of estimated clutter rate and target detection probability (simulation scenario 2)"
| 算法 | 杂波率估计平均值 | 检测概率估计平均值 |
| RA-LMB | 36.81 | 0.89 |
| DP-GLMB | 36.61 | 0.88 |

Fig.10
Comparison of OSPA and OSPA(2) errors for different filters (simulation scenario 2)"


Fig.11
Comparison of estimated cardinality for different filters (simulation scenario 2)"

| 1 |
PAINE S , O'HAGAN D W , INGGS M , et al. Evaluating the performance of FM-Based PCL radar in the presence of jamming[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 55 (2): 631- 643.
doi: 10.1109/TAES.2018.2858158 |
| 2 | MAHFOUDIA O , HORLIN F , NEYT X . Pilot-based detection for DVB-T passive coherent location radars[J]. IET Radar, Sonar & Navigation, 2020, 14 (6): 845- 851. |
| 3 | KAISER S A , CHRISTIANSON A J , NARAYANAN R M . Global positioning system processing methods for GPS passive coherent location[J]. IET Radar, Sonar & Navigation, 2017, 11 (9): 1406- 1416. |
| 4 |
COLONE F , MARTELLI T , BONGIOANNI C , et al. WiFi-based PCL for monitoring private airfields[J]. IEEE Aerospace and Electronic Systems Magazine, 2017, 32 (2): 22- 29.
doi: 10.1109/MAES.2017.160022 |
| 5 | 万显荣, 易建新, 占伟杰, 等. 基于多照射源的被动雷达研究进展与发展趋势[J]. 雷达学报, 2020, 9 (6): 939- 958. |
| WAN X R , YI J X , ZHAN W J , et al. Research progress and development trend of the multi-illuminator-based passive radar[J]. Journal of Radars, 2020, 9 (6): 939- 958. | |
| 6 |
COLONE F , FILIPPINI F , PASTINA D . Passive radar: past, present, and future challenges[J]. IEEE Aerospace and Electronic Systems Magazine, 2023, 38 (1): 54- 69.
doi: 10.1109/MAES.2022.3221685 |
| 7 |
SUI J X , WANG J , ZUO L , et al. Cascaded least square algorithm for strong clutter removal in airborne passive radar[J]. IEEE Trans.on Aerospace and Electronic Systems, 2022, 58 (1): 679- 696.
doi: 10.1109/TAES.2021.3103705 |
| 8 | ROSENBERG L , DUK V . Land clutter statistics from an airborne passive bistatic radar[J]. IEEE Trans.on Geoscience and Remote Sensing, 2022, 60, 5104009. |
| 9 |
WOJACZEK P , COLONE F , CRISTALLINI D , et al. Reciprocal- filter-based STAP for passive radar on moving platforms[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 55 (2): 967- 988.
doi: 10.1109/TAES.2018.2867688 |
| 10 |
郭云飞, 钱文杲, 袁继成. 基于KLD-JPDA的多目标无源协同定位算法[J]. 传感技术学报, 2020, 33 (6): 889- 894.
doi: 10.3969/j.issn.1004-1699.2020.06.016 |
|
GUO Y F , QIAN W G , YUAN J C . A KLD-JPDA based multitarget passive coherent location algorithm[J]. Chinese Journal of Sensors and Actuators, 2020, 33 (6): 889- 894.
doi: 10.3969/j.issn.1004-1699.2020.06.016 |
|
| 11 |
郭云飞, 滕方成, 曾泽斌. 基于QS-ML-PMHT的多目标无源协同定位方法[J]. 传感技术学报, 2016, 29 (11): 1753- 1758.
doi: 10.3969/j.issn.1004-1699.2016.11.021 |
|
GUO Y F , TENG F C , ZENG Z B . A QS-ML-PMHT based multitarget passive coherent location method[J]. Chinese Journal of Sensors and Actuators, 2016, 29 (11): 1753- 1758.
doi: 10.3969/j.issn.1004-1699.2016.11.021 |
|
| 12 |
李晓花, 李亚安, 金海燕, 等. 三维数据关联情况下外辐射源雷达多目标跟踪研究[J]. 电子与信息学报, 2021, 43 (10): 2840- 2847.
doi: 10.11999/JEIT210620 |
|
LI X H , LI Y A , JIN H Y , et al. Multi-static passive radar multi-target tracking under target-measurement-illuminator data association uncertainty[J]. Journal of Electronics & Information Technology, 2021, 43 (10): 2840- 2847.
doi: 10.11999/JEIT210620 |
|
| 13 | 曾雅俊, 王俊, 魏少明, 等. 分布式多传感器多目标跟踪方法综述[J]. 雷达学报, 2023, 12 (1): 197- 213. |
| ZENG Y J , WANG J , WEI S M , et al. Review of the method for distributed multi-sensor multi-target tracking[J]. Journal of Radars, 2023, 12 (1): 197- 213. | |
| 14 |
LI G , BATTISTELLI G , CHISCI L , et al. Distributed joint detection, tracking, and classification via labeled multi-Bernoulli filtering[J]. IEEE Trans.on Cybernetics, 2024, 54 (3): 1429- 1441.
doi: 10.1109/TCYB.2022.3208038 |
| 15 |
VO B N , VO B T , PHUNG D . Labeled random finite sets and the Bayes multi-target tracking filter[J]. IEEE Trans.on Signal Processing, 2014, 62 (24): 6554- 6567.
doi: 10.1109/TSP.2014.2364014 |
| 16 | KAI D , TIANCHENG L , YONGFENG Z , et al. Recent advances in multi-sensor multitarget tracking using random finite set[J]. Frontiers of Information Technology & Electronic Engineering, 2021, 22 (1): 5- 25. |
| 17 | PIKORA K, EHLERS F. Analysis of the FKIE passive radar data set with GMPHD and GMCPHD[C]//Proc. of the 16th International Conference on Information Fusion, 2013: 272-279. |
| 18 | 郭云飞, 潘金星, 才智. 基于多帧杂波稀疏度估计的无源协同定位[J]. 控制理论与应用, 2018, 35 (7): 981- 987. |
| GUO Y F , PAN J X , CAI Z . Passive coherent location with multi-scan clutter sparsity estimation[J]. Control Theory & Applications, 2018, 35 (7): 981- 987. | |
| 19 | BERTHILLOT C, SANTORI A, RABASTE O, et al. DVB-T airborne passive radar: clutter analysis and experimental results[C]//Proc. of the IEEE Radar Conference, 2019. |
| 20 | YANG P C, TU Z L, YANG J H. A robust space-time clutter cancellation algorithm for airborne passive radar[C]//Proc. of the IEEE International Conference on Signal, Information and Data Processing, 2019. |
| 21 | DUK V, CRISTALLINI D, WOJACZEK P, et al. Statistical analysis of clutter for passive radar on an airborne platform[C]// Proc. of the International Radar Conference, 2019. |
| 22 |
MAHLER R P S , VO B T , VO B N . CPHD filtering with unknown clutter rate and detection profile[J]. IEEE Trans.on Signal Processing, 2011, 59 (8): 3497- 3513.
doi: 10.1109/TSP.2011.2128316 |
| 23 |
GUO Y , THARMARASA R , KIRUBARAJAN T , et al. Passive coherent location with unknown transmitter states[J]. IEEE Trans.on Aerospace and Electronic Systems, 2017, 53 (1): 148- 168.
doi: 10.1109/TAES.2017.2649739 |
| 24 |
VO B T , VO B N . Labeled random finite sets and multi-object conjugate priors[J]. IEEE Trans.on Signal Processing, 2013, 61 (13): 3460- 3475.
doi: 10.1109/TSP.2013.2259822 |
| 25 |
REUTER S , VO B T , VO B N , et al. The labeled multi-Bernoulli filter[J]. IEEE Trans.on Signal Processing, 2014, 62 (12): 3246- 3260.
doi: 10.1109/TSP.2014.2323064 |
| 26 |
JING T , TIAN W , HUANG G M , et al. Observability and estimability of passive radar with unknown illuminator states using different observations[J]. Journal of Systems Engineering and Electronics, 2020, 31 (6): 1193- 1205.
doi: 10.23919/JSEE.2020.000092 |
| 27 |
RISTIC B , CLARK D , VO B N , et al. Adaptive target birth intensity for PHD and CPHD filters[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (2): 1656- 1668.
doi: 10.1109/TAES.2012.6178085 |
| 28 |
CHEN X , THARMARASA R , PELLETIER M , et al. Integrated clutter estimation and target tracking using Poisson point processes[J]. IEEE Trans.on Aerospace and Electronic Systems, 2012, 48 (2): 1210- 1235.
doi: 10.1109/TAES.2012.6178058 |
| 29 |
VO B T , VO B N , HOSEINNEZHAD R , et al. Robust multi-Bernoulli filtering[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7 (3): 399- 409.
doi: 10.1109/JSTSP.2013.2252325 |
| 30 |
VO B T , VO B N , CANTONI A . The cardinality balanced multi-target multi-Bernoulli filter and its implementations[J]. IEEE Trans.on Signal Processing, 2009, 57 (2): 409- 423.
doi: 10.1109/TSP.2008.2007924 |
| 31 |
DO C T , DAT NGUYEN T T , MORATUWAGE D , et al. Multi-object tracking with an adaptive generalized labeled multi- Bernoulli filter[J]. Signal Processing, 2022, 196, 108532.
doi: 10.1016/j.sigpro.2022.108532 |
| 32 |
VO B N , VO B T , HOANG H G . An efficient implementation of the generalized labeled multi-Bernoulli filter[J]. IEEE Trans.on Signal Processing, 2017, 65 (8): 1975- 1987.
doi: 10.1109/TSP.2016.2641392 |
| 33 |
BEARD M , VO B T , VO B N . A solution for large-scale multi-object tracking[J]. IEEE Trans.on Signal Processing, 2020, 68, 2754- 2769.
doi: 10.1109/TSP.2020.2986136 |
| [1] | Linhai JIANG, Baichun GONG, Chuankai LIU, Yang YANG, Renyong ZHANG. Space multi-target tracking method for space-based distributedpassive detection [J]. Systems Engineering and Electronics, 2024, 46(8): 2789-2797. |
| [2] | Siyi YAO, Wanchun LI, Lin GAO, Huaguo ZHANG, Hangwei HU. Multi-sensor multi-target tracking based on distributed PMHT [J]. Systems Engineering and Electronics, 2024, 46(7): 2184-2190. |
| [3] | Yaling ZHUO, Xiang LI, Lei ZUO, Juan HU. Power allocation algorithm with random data packet loss in netted radar [J]. Systems Engineering and Electronics, 2024, 46(6): 1957-1966. |
| [4] | Meibin QI, Shuo ZHUANG, Jingjing HU, Yanfang YANG, Yuankui HU. Resolvable group target tracking based on joint GLMB filter [J]. Systems Engineering and Electronics, 2024, 46(4): 1212-1219. |
| [5] | Shuya ZENG, Bin RAO. Ballistic target association method based on dynamic conservation law [J]. Systems Engineering and Electronics, 2024, 46(2): 684-691. |
| [6] | Wenhao BI, Jie ZHOU, An ZHANG, Li LIU. JPDA algorithm based on maximum entropy fuzzy clustering in clutter environment [J]. Systems Engineering and Electronics, 2023, 45(7): 1920-1927. |
| [7] | Zhengwei LIU, Ying CHEN, Yaobing LU. PHD filter for small-angle crossing of multi-target trajectories [J]. Systems Engineering and Electronics, 2023, 45(4): 982-990. |
| [8] | Lei AN, Zhaorui LI, Bing JI. Non-myopic scheduling method for mobile active/passive sensor in clutter environment [J]. Systems Engineering and Electronics, 2023, 45(1): 165-174. |
| [9] | Huaisheng XIN, Chen CAO. Interacting multiple model based grouping δ-generalized labeledmulti-Bernoulli algorithm [J]. Systems Engineering and Electronics, 2022, 44(4): 1128-1138. |
| [10] | Zizhuang SONG, Jiawei YANG, Dongfang ZHANG, Shiqiang WANG, Shuo ZHANG. Real-time infrared multi-class multi-target anchor-free tracking network [J]. Systems Engineering and Electronics, 2022, 44(2): 401-409. |
| [11] | Lifan YIN, Yiqun ZHANG, Shuo WANG, Chenggang SUN. A survey on histogram probabilistic multi-hypothesis tracker technique [J]. Systems Engineering and Electronics, 2021, 43(11): 3118-3125. |
| [12] | Zhengjie LI, Junwei XIE, Haowei ZHANG, Zhaojian ZHANG. Joint power and bandwidth allocation algorithm based on collocated MIMO radar [J]. Systems Engineering and Electronics, 2020, 42(5): 1041-1049. |
| [13] | Xiaodong LU, Tao CUI, Wei WANG, Cheng CHENG. Multi-target labeled multi-Bernoulli filter with time-delay and registration errors [J]. Systems Engineering and Electronics, 2020, 42(4): 904-911. |
| [14] | Peng WANG, Mei YANG, Jiancheng ZHU, Rusheng JU, Ge LI. Dynamic data driven modeling and simulation method for digital twin [J]. Systems Engineering and Electronics, 2020, 42(12): 2779-2786. |
| [15] | Luo ZUO, Jun WANG, Gang CHEN, Yaqi DENG, Yuanyuan WEN. Super-resolution DOA estimation method of passive bistatic radar based on TLS-CS [J]. Systems Engineering and Electronics, 2020, 42(1): 61-66. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||