Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (6): 1964-1974.doi: 10.12305/j.issn.1001-506X.2025.06.24
• Guidance, Navigation and Control • Previous Articles Next Articles
Collision avoidance path planning and re-planning for USV formation
Yijie LIU1,2, Bin JIANG1,2,*, Yajie MA1,2, Wenbo LI1,3, Chengrui LIU1,3
- 1. College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
2. Engineering Research Center of Autonomous Control Technology of Aircraft, Ministry of Education, Nanjing 211106, China
3. National Key Laboratory of Space Intelligent Control, Beijing Institute of Control Engineering, Beijing 100094, China
-
Received:2024-06-05Online:2025-06-25Published:2025-07-09 -
Contact:Bin JIANG
CLC Number:
Cite this article
Yijie LIU, Bin JIANG, Yajie MA, Wenbo LI, Chengrui LIU. Collision avoidance path planning and re-planning for USV formation[J]. Systems Engineering and Electronics, 2025, 47(6): 1964-1974.
share this article
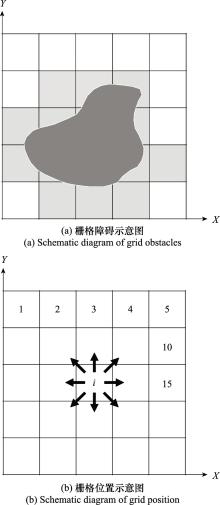
Fig.1
Grid map"
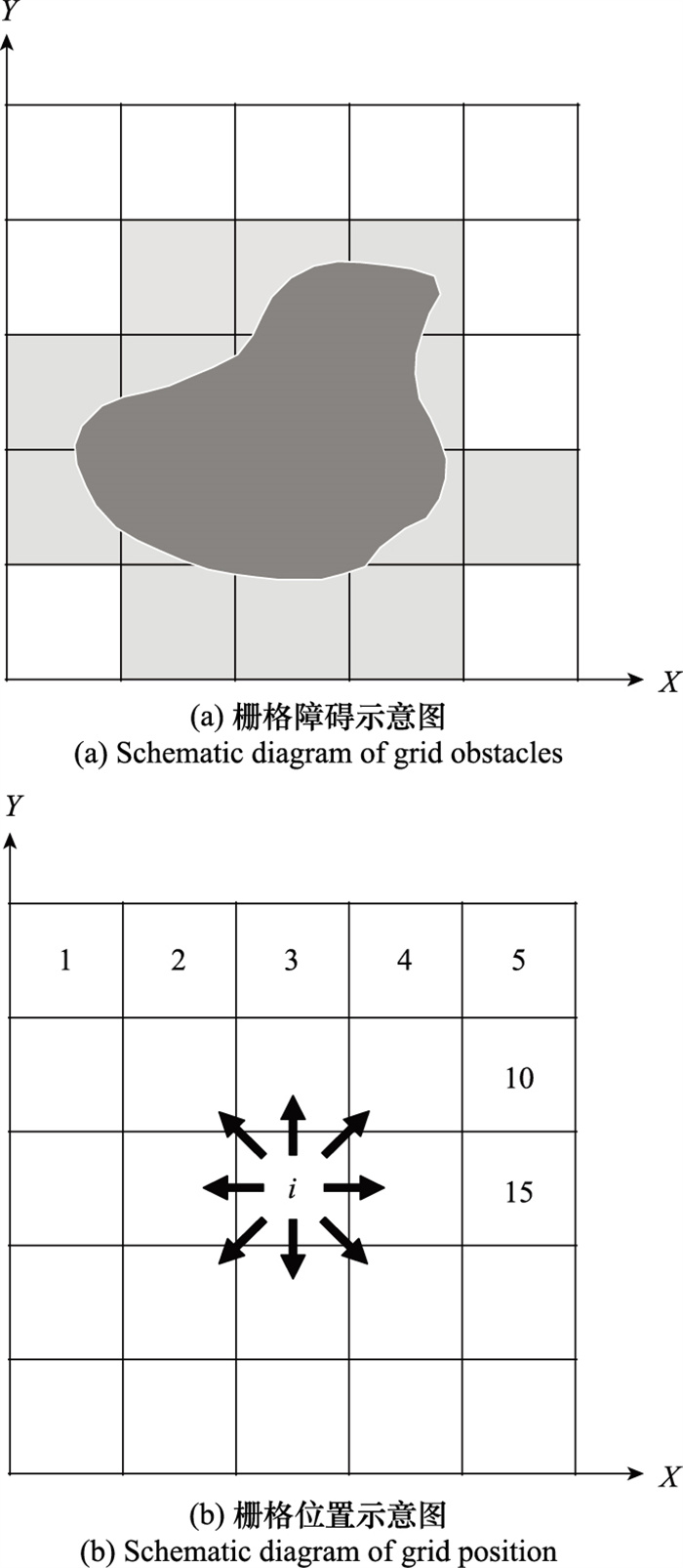
Fig.2
Structural diagram of unmanned surface vessel"
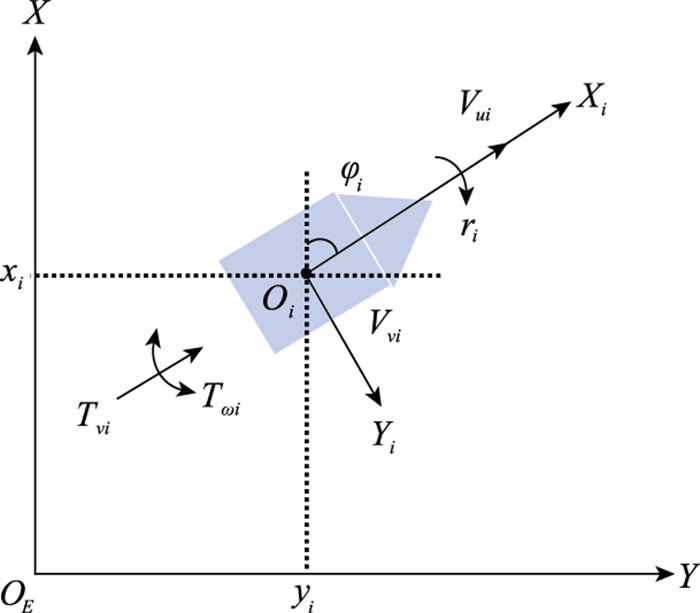
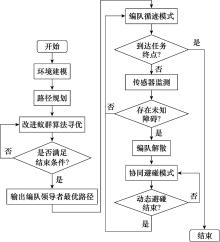
Fig.3
Process of unmanned surface vessel formation collaborative collision avoidance algorithm"
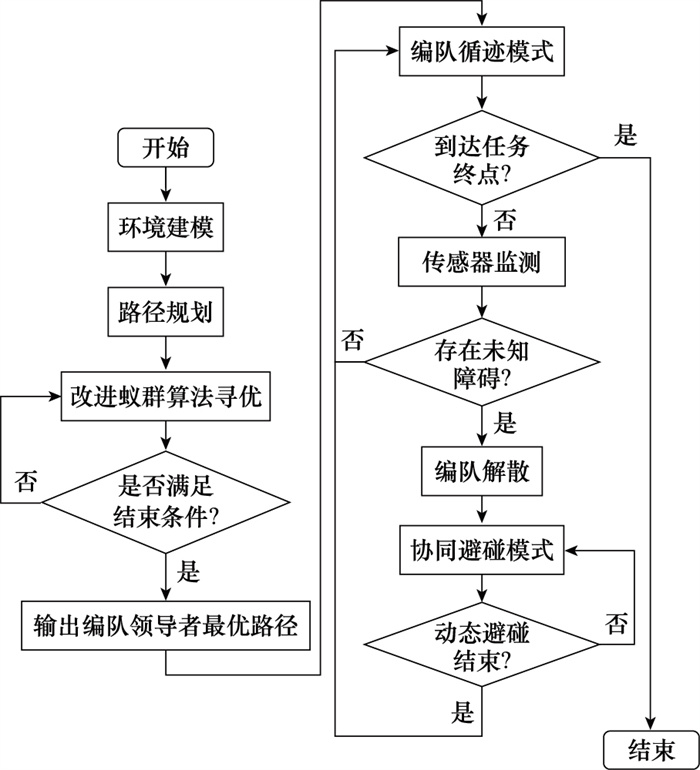
Table 1
Path planning algorithm parameters"
| 参数 | 地图维数 | ||
| 20 | 40 | 60 | |
| 迭代次数 | 100 | 300 | 500 |
| 蚂蚁数量/只 | 10 | 30 | 50 |
| 栅格长度/m | 1 000 | 1 000 | 1 000 |

Fig.4
Comparison of collision avoidance path planning results in 20-dimensional obstacle environment"
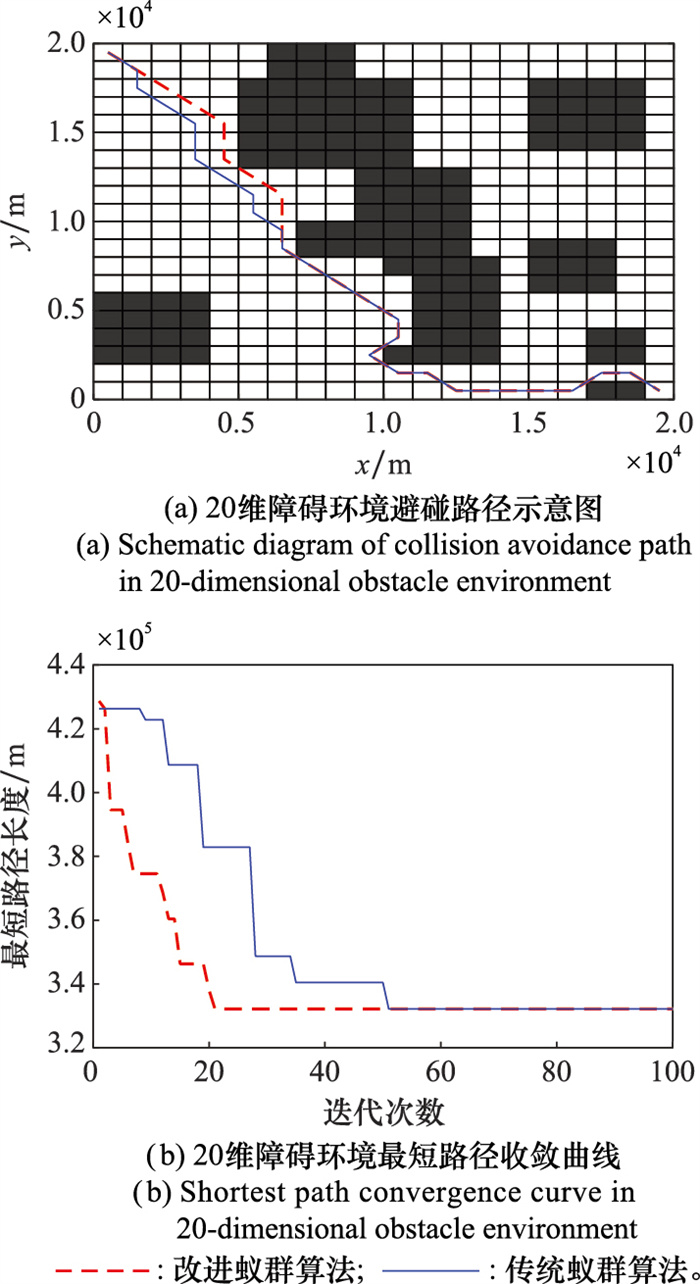

Fig.5
Comparison of collision avoidance path planning results in 40-dimensional obstacle environment"
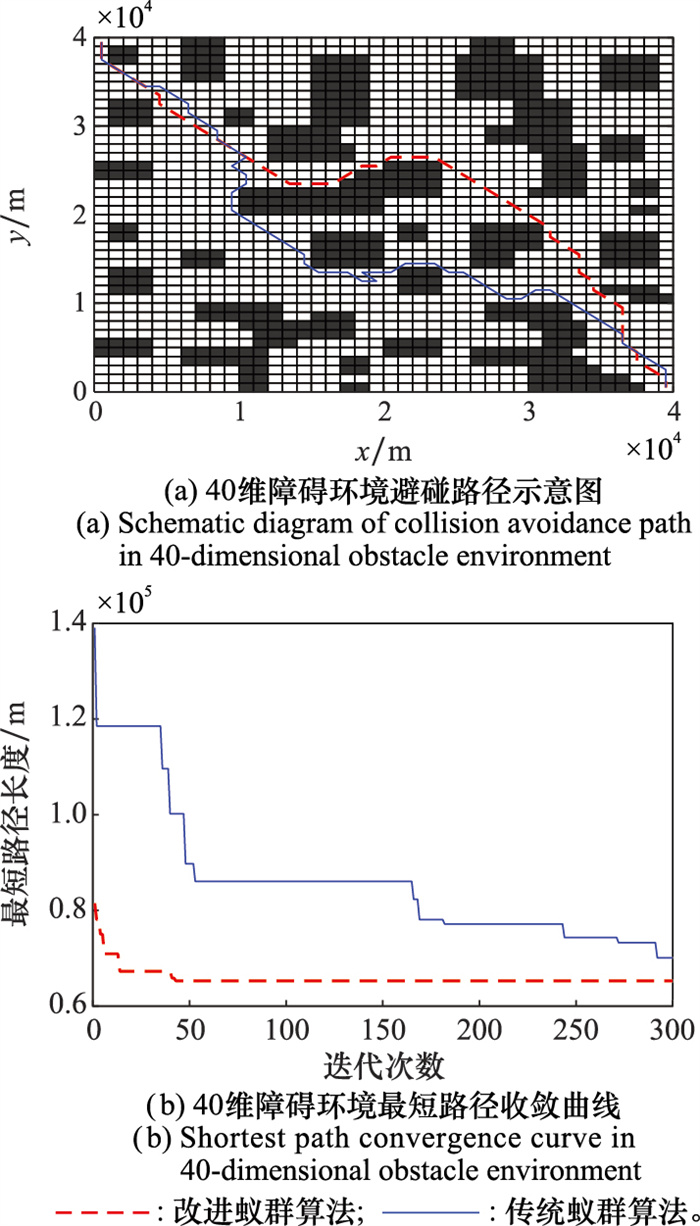

Fig.6
Comparison of collision avoidance path planning results in 60-dimensional obstacle environment"
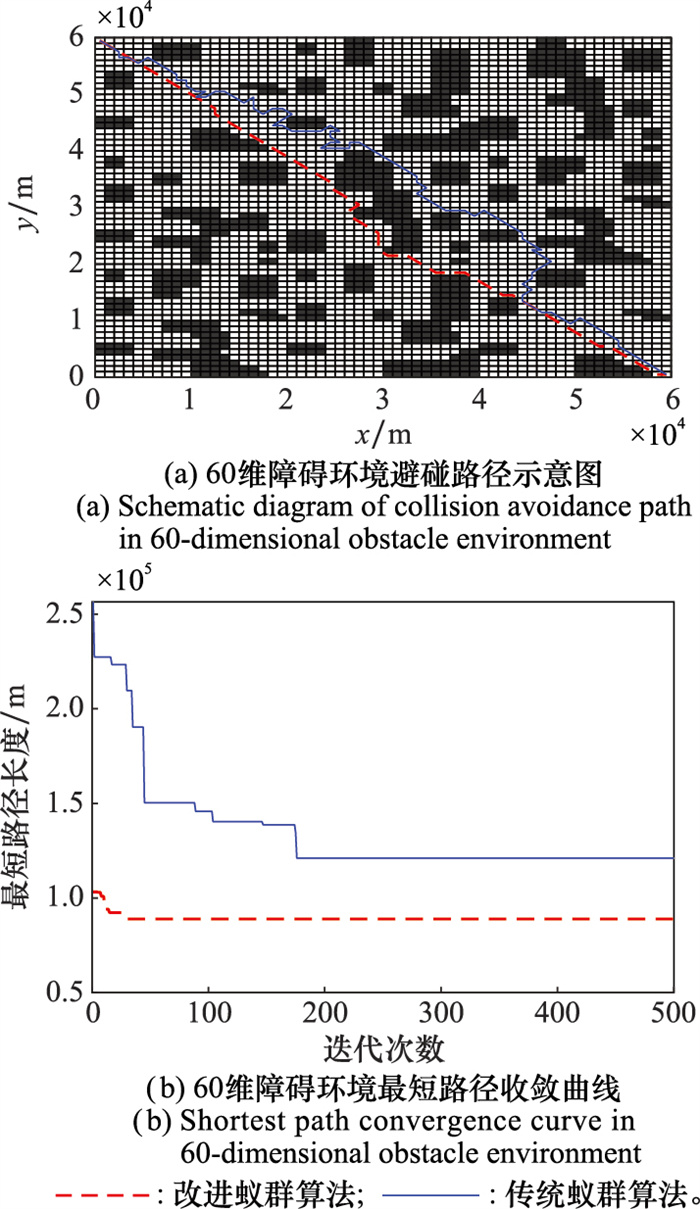
Fig.7
Comparison of collision avoidance path planning results in complex obstacle environment"
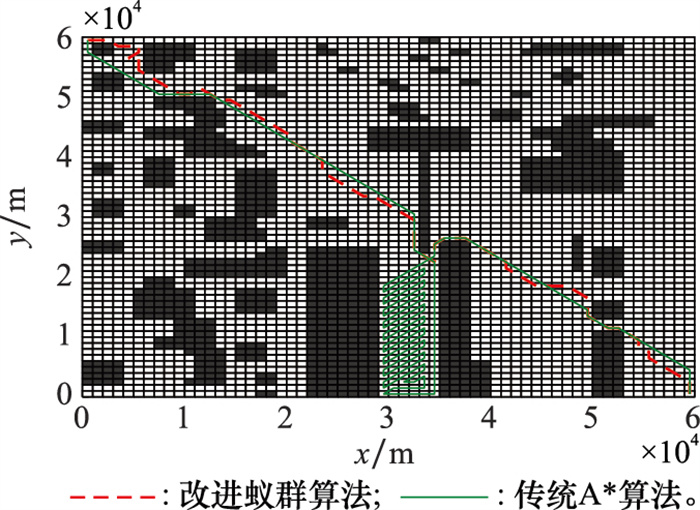

Fig.8
System communication topology diagram"
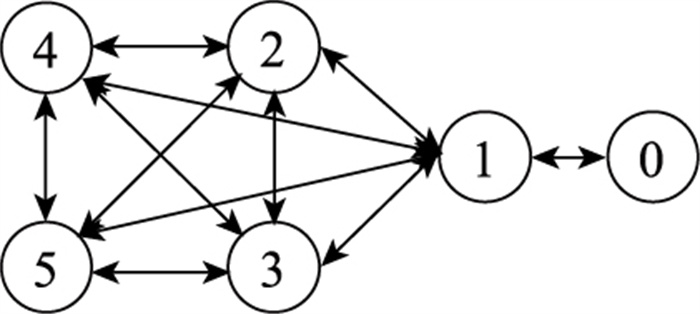
Table 2
Collaborative navigation parameters of unmanned surface vessel formation"
| 参数 | 无人艇编号/位置 | 数值 |
| 环境尺寸/m | — | (20 000, 20 000) |
| 初始位置/m | 虚拟领航艇 | (500, 19 500) |
| 1号无人艇 | (450, 19 530) | |
| 2号无人艇 | (400, 19 550) | |
| 3号无人艇 | (400, 19 450) | |
| 4号无人艇 | (400, 19 550) | |
| 5号无人艇 | (350, 19 450) | |
| 初始速度/kn | 虚拟领航艇 | (0, 1×463/900) |
| 试验无人艇 | (0, 0) | |
| 最大速度/kn | 虚拟领航艇 | 12×463/900 |
| 试验无人艇 | 15×463/900 | |
| 编队构型/m | (x10, y10) | (0, 0) |
| (x20, y20) | (-50, 50) | |
| (x30, y30) | (-50, -50) | |
| (x40, y40) | (-100, 50) | |
| (x50, y50) | (-100, -50) | |
| 最大加速度/(m/s2) | — | 0.5 |
| γ | — | 1 |
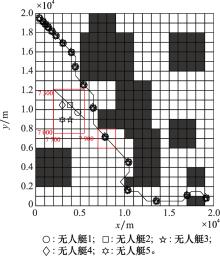
Fig.9
Collision avoidance trajectory of unmanned surface vessel formation"
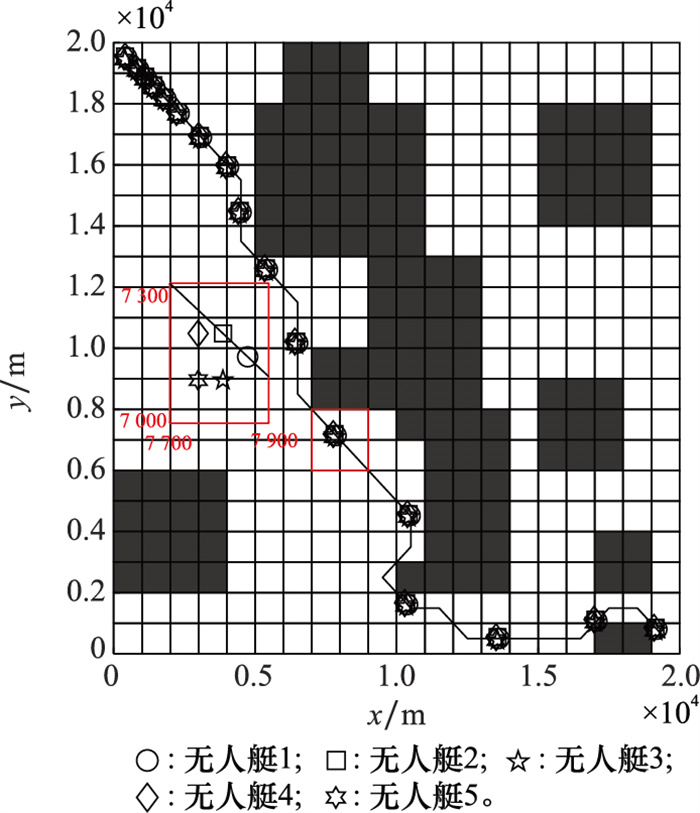
Table 3
Unknown obstacle parameters"
| 参数 | 数值 |
| 位置/m | (3 000, 17 000) |
| 障碍物半径/m | 150 |
| 安全距离Rs/m | 20 |

Fig.10
Dynamic collaborative collision avoidance results"
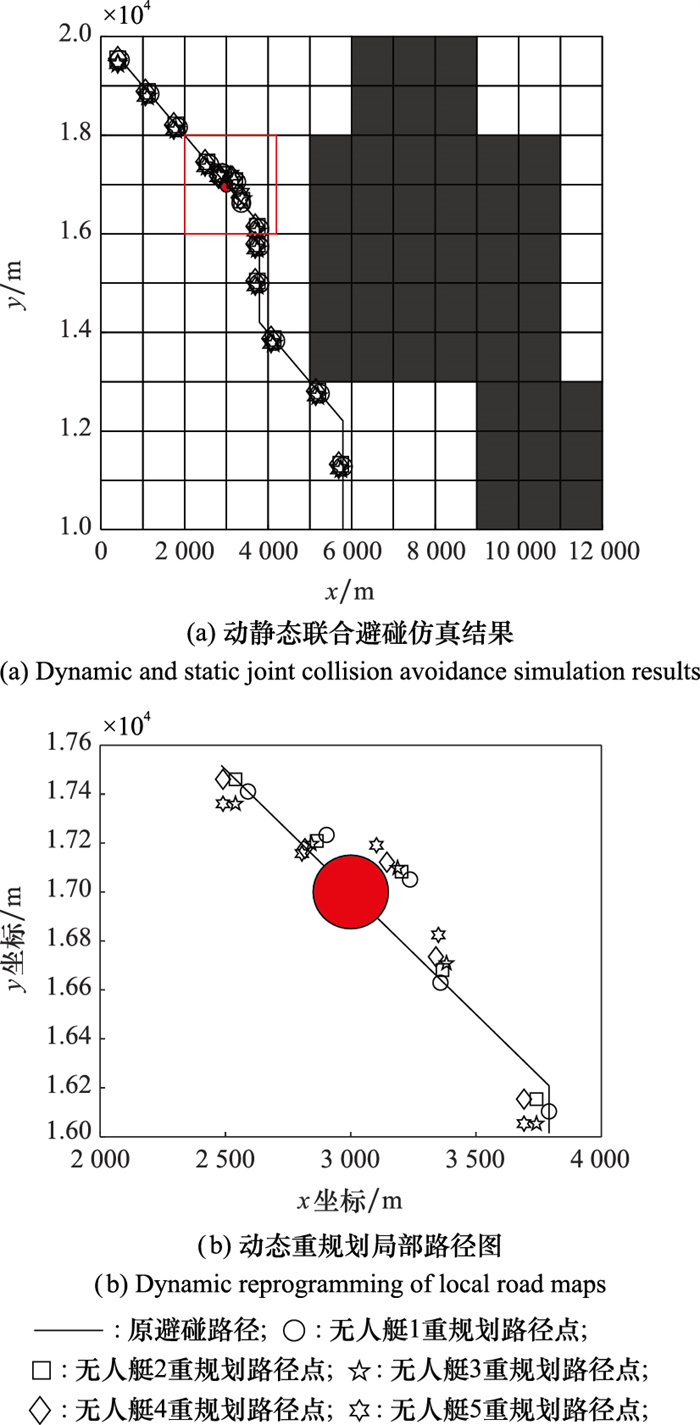
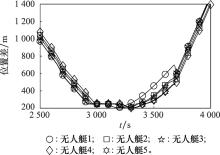
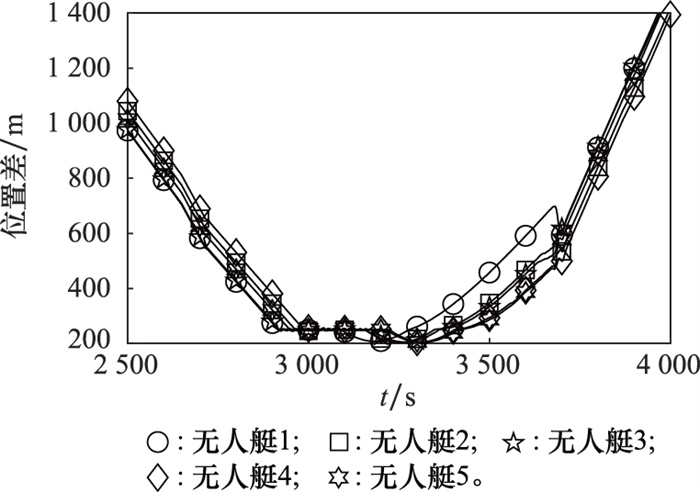
Fig.11
Position difference between each unmanned surface vessel and obstacles"
| 1 |
JORGEV A M,GRANADAR,MAIDANAR G,et al.A survey on unmanned surface vehicles for disaster robotics: main challenges and directions[J].Sensors,2019,19(3):702.
doi: 10.3390/s19030702 |
| 2 |
SUNH B,SHIJ R,HOUL L,et al.Dynamic event-triggered output feedback fault-tolerant control for dynamic positioning of unmanned surface vehicles with multiple estimators[J].IEEE Trans.on Vehicular Technology,2024,73(3):3218-3229.
doi: 10.1109/TVT.2023.3327265 |
| 3 |
LIY M,FENGK L,LIK W.Finite-time fuzzy adaptive dynamic event-triggered formation tracking control for USVs with actuator faults and multiple constraints[J].IEEE Trans.on Industrial Informatics,2024,20(4):5285-5296.
doi: 10.1109/TII.2023.3331101 |
| 4 |
FANY S,SUNX J,WANGG F,et al.Collision avoidance controller for unmanned surface vehicle based on improved cuckoo search algorithm[J].Applied Sciences,2021,11(20):9741.
doi: 10.3390/app11209741 |
| 5 |
MAOZ H,JIANGB,SHIP.Fault-tolerant control for a class of nonlinear sampled-data systems via a Euler approximate observer[J].Automatica,2010,46(11):1852-1859.
doi: 10.1016/j.automatica.2010.06.052 |
| 6 |
MAY J,JIANGB,TAOG,et al.Uncertainty decomposition based fault-tolerant adaptive control of flexible spacecraft[J].IEEE Trans.on Aerospace and Electronic Systems,2015,51(2):1053-1068.
doi: 10.1109/TAES.2014.130032 |
| 7 |
SONGR,LIUY C,BUCKNALLR.Smoothed A* algorithm for practical unmanned surface vehicle path planning[J].Applied Ocean Research,2019,83,9-20.
doi: 10.1016/j.apor.2018.12.001 |
| 8 |
LIX H,YUS H,GAOX Z,et al.Path planning and obstacle avoidance control of UUV based on an enhanced A* algorithm and MPC in dynamic environment[J].Ocean Engineering,2024,302,117584.
doi: 10.1016/j.oceaneng.2024.117584 |
| 9 |
SONGJ,HAOC,SUJ C.Path planning for unmanned surface vehicle based on predictive artificial potential field[J].International Journal of Advanced Robotic Systems,2020,17(2)
doi: 10.1177/1729881420918461 |
| 10 |
ZHANGW L,SHANL,CHANGL,et al.SVF-RRT*: a stream-based VF-RRT* for USVs path planning considering ocean currents[J].IEEE Robotics and Automation Letters,2023,8(4):2413-2420.
doi: 10.1109/LRA.2023.3245409 |
| 11 |
XIAG Q,HANZ W,ZHAOB,et al.Global path planning for unmanned surface vehicle based on improved quantum ant colony algorithm[J].Mathematical Problems in Engineering,2019,2019,2902170.
doi: 10.1155/2019/2902170 |
| 12 |
CUIY N,RENJ,ZHANGY.Path planning algorithm for un manned surface vehicle based on optimized ant colony algorithm[J].IEEJ Transactions on Electrical and Electronic Engineering,2022,17(7):1027-1037.
doi: 10.1002/tee.23592 |
| 13 |
ZHANGJ,DUX,DONGQ C,et al.Distributed collaborative complete coverage path planning based on hybrid strategy[J].Journal of Systems Engineering and Electronics,2024,35(2):463-472.
doi: 10.23919/JSEE.2023.000118 |
| 14 |
XINJ F,ZHONGJ B,LIS X,et al.Greedy mechanism based particle swarm optimization for path planning problem of an unmanned surface vehicle[J].Sensors,2019,19(21):4620.
doi: 10.3390/s19214620 |
| 15 |
LUOJ,LIANGQ C,LIH.UAV penetration mission path planning based on improved holonic particle swarm optimization[J].Journal of Systems Engineering and Electronics,2023,34(1):197-213.
doi: 10.23919/JSEE.2022.000132 |
| 16 | 赵贵祥,周健,李云淼,等.改进双向快速搜索随机树的无人艇路径规划[J].系统工程与电子技术,2024,46(4):1364-1371. |
| ZHAOG X,ZHOUJ,LIY M,et al.Improved bi-directional rapidly-exploring random tree path planning for USV[J].Systems Engineering and Electronics,2024,46(4):1364-1371. | |
| 17 |
LINC J,WANGH J,YUANJ Y,et al.An improved recurrent neural network for unmanned underwater vehicle online obstacle avoidance[J].Ocean Engineering,2019,189,106327.
doi: 10.1016/j.oceaneng.2019.106327 |
| 18 |
GUOS Y,ZHANGX G,ZHENGY S,et al.An autonomous path planning model for unmanned ships based on deep reinforcement learning[J].Sensors,2020,20(2):426.
doi: 10.3390/s20020426 |
| 19 |
陈岱岱,李玩幽.带拖线阵的水面无人艇局部路径规划算法[J].系统工程与电子技术,2020,42(9):1988-1994.
doi: 10.3969/j.issn.1001-506X.2020.09.14 |
|
CHEND D,LIW Y.Local path planning algorithm for USV with towed cable[J].Systems Engineering and Electronics,2020,42(9):1988-1994.
doi: 10.3969/j.issn.1001-506X.2020.09.14 |
|
| 20 | ZHUANG Y F, DONG H R, HUANG H B, et al. Dynamic path planning of USV based on improved artificial potential field method in harsh environment[C]//Proc. of the China Automation Congress, 2022: 5391-5396. |
| 21 |
赵贵祥,王晨旭,王贺平,等.改进速度障碍法的无人艇局部路径规划[J].系统工程与电子技术,2023,45(12):3975-3983.
doi: 10.12305/j.issn.1001-506X.2023.12.28 |
|
ZHAOG X,WANGC X,WANGH P,et al.Local path planning for unmanned surface vehicle using improved velocity obstacle method[J].Systems Engineering and Electronics,2023,45(12):3975-3983.
doi: 10.12305/j.issn.1001-506X.2023.12.28 |
|
| 22 |
李文刚,汪流江,方德翔,等.联合A与动态窗口法的路径规划算法[J].系统工程与电子技术,2021,43(12):3694-3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
LIW G,WANGL J,FANGD X,et al.Path planning algorithm combining A with DWA[J].Systems Engineering and Electronics,2021,43(12):3694-3702.
doi: 10.12305/j.issn.1001-506X.2021.12.33 |
|
| 23 |
YANX,JIANGD P,MIAOR L,et al.Formation control and obstacle avoidance algorithm of a multi-USV system based on virtual structure and artificial potential field[J].Journal of Marine Science and Engineering,2021,9(2):161.
doi: 10.3390/jmse9020161 |
| 24 | WEIX W,WANGH,TANGY X.Deep hierarchical reinforcement learning based formation planning for multiple unmanned surface vehicles with experimental results[J].Ocean Engineering,2023,286(2):115577. |
| 25 |
ZHANGJ,CUIY,FANX Z,et al.Asynchronous multi-threading reinforcement control decision method for unmanned surface vessel[J].IEEE Internet of Things Journal,2023,10(24):22806-22822.
doi: 10.1109/JIOT.2023.3305387 |
| 26 |
WANGD,CHENH M,LAOS H,et al.Efficient path planning and dynamic obstacle avoidance in edge for safe navigation of USV[J].IEEE Internet of Things Journal,2024,11(6):10084-10094.
doi: 10.1109/JIOT.2023.3325234 |
| 27 |
HES D,WANGM,DAIS L,et al.Leader-follower formation control of USVs with prescribed performance and collision avoidance[J].IEEE Trans.on Industrial Informatics,2019,15(1):572-581.
doi: 10.1109/TII.2018.2839739 |
| 28 |
HAND D,MINL Q,ZHANGH Y,et al.Robust chaos of cubic polynomial discrete maps with application to pseudorandom number generators[J].Mathematical Problems in Engineering,2019,2019,8250903.
doi: 10.1155/2019/8250903 |
| 29 | RAHMANM S.Basic graph theory[M].Berlin:Springer,2017:11-12. |
| 30 | REN W. Consensus based formation control strategies for multi-vehicle systems[C]//Proc. of the American Control Conference, 2006: 4237-4242. |
| 31 | 王常虹,刘博,李清华.集群多机器人系统建模研究的发展与展望[J].导航定位与授时,2021,8(1):1-13. |
| WANGC H,LIUB,LIQ H.Development and prospect of research on modeling of swarm multi-robot system[J].Navigation Positioning and Timing,2021,8(1):1-13. |
| [1] | Wei CHEN, Congqing WANG, Qiang ZENG, Zhan LI. UAV coverage path planning for aircraft surface visual inspection [J]. Systems Engineering and Electronics, 2025, 47(4): 1206-1213. |
| [2] | Ze GENG, Yanyan HUANG, Han ZHANG. UAV swarm anti-artillery search path planning based on artillery transfer path prediction [J]. Systems Engineering and Electronics, 2025, 47(4): 1222-1234. |
| [3] | Yuqi XIA, Yanyan HUANG, Qia CHEN. Path planning for unmanned vehicle reconnaissance based on deep Q-network [J]. Systems Engineering and Electronics, 2024, 46(9): 3070-3081. |
| [4] | Bowen FEI, Weidong BAO, Daqian LIU, Xiaomin ZHU. Air-ground cooperative autonomous task allocation method for dynamic target search and strike [J]. Systems Engineering and Electronics, 2024, 46(7): 2346-2358. |
| [5] | Jie LI, Yuejin TAN. Operation loop recommendation method based on integrated improved ant colony algorithm [J]. Systems Engineering and Electronics, 2024, 46(6): 2002-2012. |
| [6] | Jiawei SUN, Minghui YU, Dapeng YANG, Haoquan TANG, Dapeng BIAN. Path planning of carrier aircraft traction system based on CL-RRT and MPC [J]. Systems Engineering and Electronics, 2024, 46(5): 1745-1755. |
| [7] | Dong SUI, Zhenyu YANG, Songbin DING, Tingting ZHOU. Three-dimensional path planning of UAV based on EMSDBO algorithm [J]. Systems Engineering and Electronics, 2024, 46(5): 1756-1766. |
| [8] | Jing YU, Xiaojun WU, Anlin JIANG, Enmi YONG. Research on UAV path planning method based on the multi-precision planning windows [J]. Systems Engineering and Electronics, 2024, 46(5): 1767-1776. |
| [9] | Gang LIU, Zhibiao AN, Maojun ZHANG, Yu LIU, Wu LI. Subject objective path planning algorithm based on continuous road network environment [J]. Systems Engineering and Electronics, 2024, 46(4): 1346-1356. |
| [10] | Guixiang ZHAO, Jian ZHOU, Yunmiao LI, Chenxu WANG. Improved bi-directional rapidly-exploring random tree path planning for USV [J]. Systems Engineering and Electronics, 2024, 46(4): 1364-1371. |
| [11] | Ping YANG, Bing XIAO, Xin CHEN, Luqi TANG. 3D path planning problem for fighter aircraft with multiple constraints [J]. Systems Engineering and Electronics, 2024, 46(12): 4213-4221. |
| [12] | Yinfei WU, Xinkai LI, Hongli ZHANG, Yingying CHEN, Fengjin GONG. Optimization and design of virtual tube based on elastic area characteristics [J]. Systems Engineering and Electronics, 2024, 46(11): 3862-3873. |
| [13] | Heng TANG, Wei SUN, Lei LYU, Ruofei HE, Jianjun WU, Changhao SUN, Tianye SUN. UAV formation path planning approach incorporating dynamic reward strategy [J]. Systems Engineering and Electronics, 2024, 46(10): 3506-3518. |
| [14] | Zihao CHEN, Juan LI, Chang LIU, Jie LI, Xiaoyu LIU. Task planning method for coordinated attacks on ground targets under time constraints [J]. Systems Engineering and Electronics, 2023, 45(8): 2353-2360. |
| [15] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||