Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (5): 1663-1670.doi: 10.12305/j.issn.1001-506X.2025.05.28
• Guidance, Navigation and Control • Previous Articles
Research on inertial pedestrian navigation algorithm based on prediction and correction of heading error through full-interval
Hongde DAI1,*, Jiawei YU2, Baidong ZHENG1, Xiaoyu ZHANG2, Mi TIAN1
- 1. School of Basic Sciences for Aviation, Naval Aviation University, Yantai 264001, China
2. College of Coastal Defense, Naval Aviation University, Yantai 264001, China
-
Received:2024-04-02Online:2025-06-11Published:2025-06-18 -
Contact:Hongde DAI
CLC Number:
Cite this article
Hongde DAI, Jiawei YU, Baidong ZHENG, Xiaoyu ZHANG, Mi TIAN. Research on inertial pedestrian navigation algorithm based on prediction and correction of heading error through full-interval[J]. Systems Engineering and Electronics, 2025, 47(5): 1663-1670.
share this article
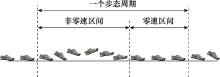
Fig.1
Illustration of gait cycle"
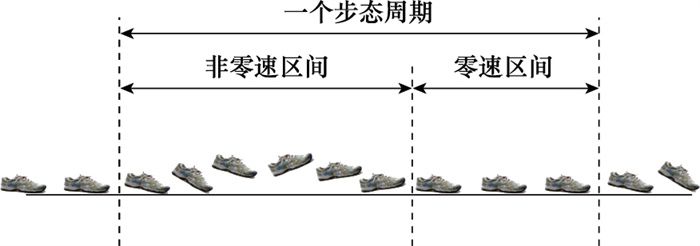
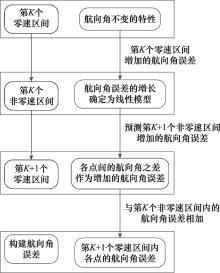
Fig.2
Heading error prediction"
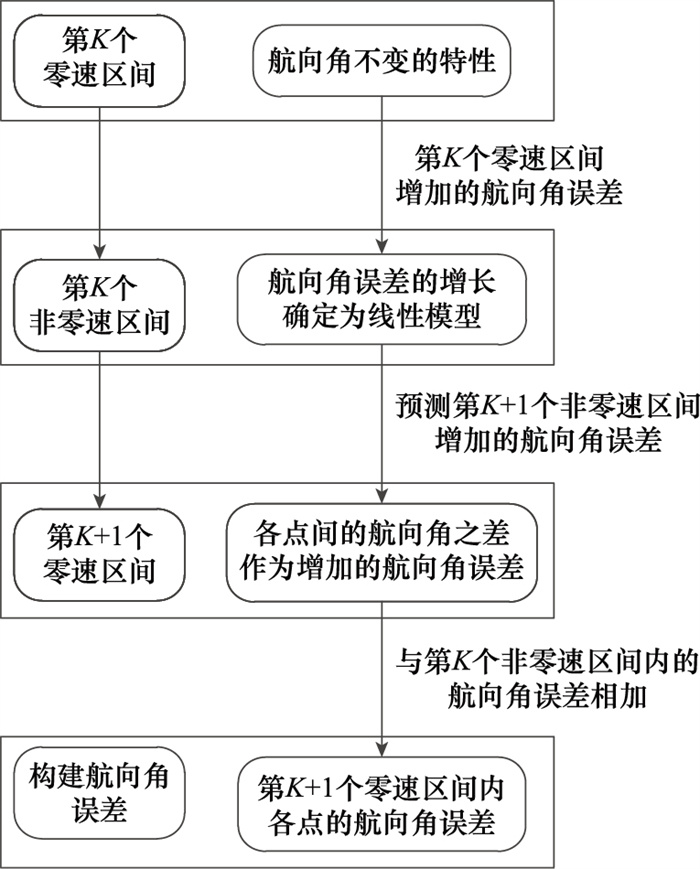
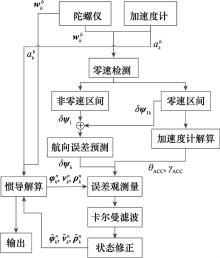
Fig.3
Schematic diagram of working principle for heading error prediction and correction algorithm"
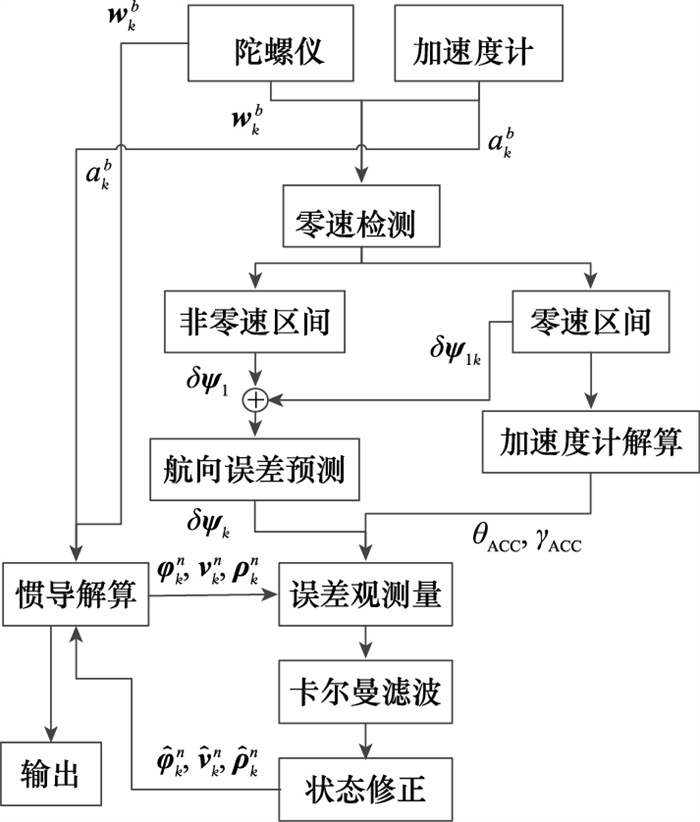
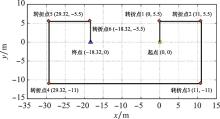
Fig.4
Diagram of complex motion trajectory"
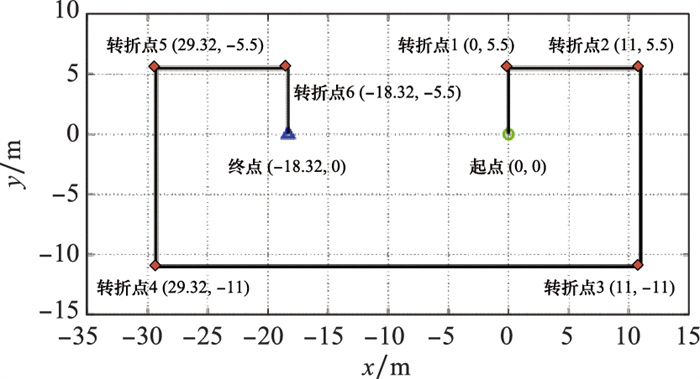
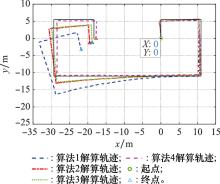
Fig.5
Complex motion path comparison in experiments"
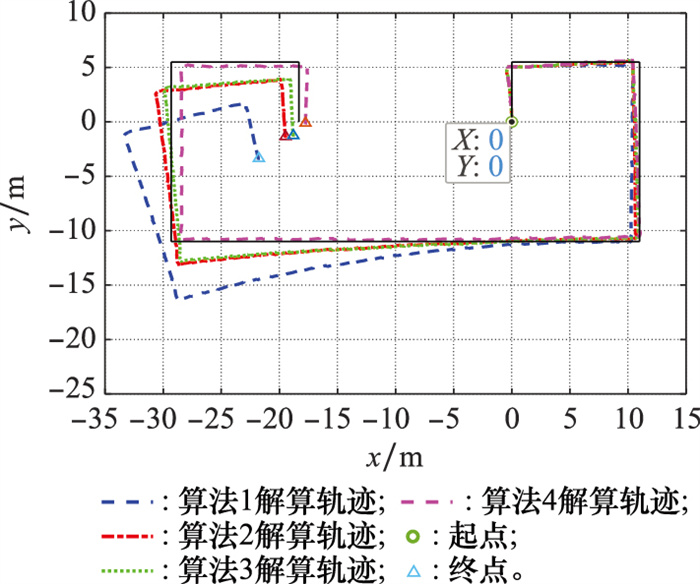
Table 1
Comparison of position and trajectory errors"
| 算法 | 参考点坐标/m | 对应点坐标/m | Δr/m | ΔR/m | ΔS/m |
| 算法1 | (0, 5.5) | (-0.48, 4.86) | 0.80 | 3.81 | 2.77 |
| (11, 5.5) | (10.22, 5.34) | 0.80 | 3.81 | 2.77 | |
| (11, -11) | (10.33, -10.79) | 0.70 | 3.81 | 2.77 | |
| (-29.32, -11) | (-28.47, -16.47) | 5.54 | 3.81 | 2.77 | |
| (-29.32, 5.5) | (-33.31, -1.36) | 7.94 | 3.81 | 2.77 | |
| (-18.32, 5.5) | (-22.9, 1.58) | 6.03 | 3.81 | 2.77 | |
| (-18.32, 0) | (-21.73, -3.46) | 4.86 | 3.81 | 2.77 | |
| 算法2 | (0, 5.5) | (-0.48, 4.86) | 0.80 | 1.84 | 1.05 |
| (11, 5.5) | (10.28, 5.58) | 0.72 | 1.84 | 1.05 | |
| (11, -11) | (10.87, -10.42) | 0.59 | 1.84 | 1.05 | |
| (-29.32, -11) | (-28.41, -13.63) | 2.78 | 1.84 | 1.05 | |
| (-29.32, 5.5) | (-30.42, 2.28) | 3.40 | 1.84 | 1.05 | |
| (-18.32, 5.5) | (-19.95, 3.52) | 2.56 | 1.84 | 1.05 | |
| (-18.32, 0) | (-19.45, -1.65) | 2.00 | 1.84 | 1.05 | |
| 算法3 | (0, 5.5) | (-0.48, 4.86) | 0.80 | 1.30 | 0.56 |
| (11, 5.5) | (10.27, 5.77) | 0.78 | 1.30 | 0.56 | |
| (11, -11) | (11.18, -10.34) | 0.68 | 1.30 | 0.56 | |
| (-29.32, -11) | (-28.12, -12.6) | 2.00 | 1.30 | 0.56 | |
| (-29.32, 5.5) | (-29.2, 3.33) | 2.17 | 1.30 | 0.56 | |
| (-18.32, 5.5) | (-18.45, 4.02) | 1.49 | 1.30 | 0.56 | |
| (-18.32, 0) | (-18.23, -1.16) | 1.16 | 1.30 | 0.56 | |
| 算法4 | (0, 5.5) | (-0.48, 4.86) | 0.80 | 0.94 | 0.17 |
| (11, 5.5) | (10.29, 5.85) | 0.79 | 0.94 | 0.17 | |
| (11, -11) | (11.22, -10.24) | 0.79 | 0.94 | 0.17 | |
| (-29.32, -11) | (-28.25, -10.87) | 1.08 | 0.94 | 0.17 | |
| (-29.32, 5.5) | (-28.22, 4.89) | 1.26 | 0.94 | 0.17 | |
| (-18.32, 5.5) | (-17.4 6, 4.92) | 1.04 | 0.94 | 0.17 | |
| (-18.32, 0) | (-17.55, -0.25) | 0.81 | 0.94 | 0.17 |

Fig.6
Comparison diagram of complex motion path calculation situations"
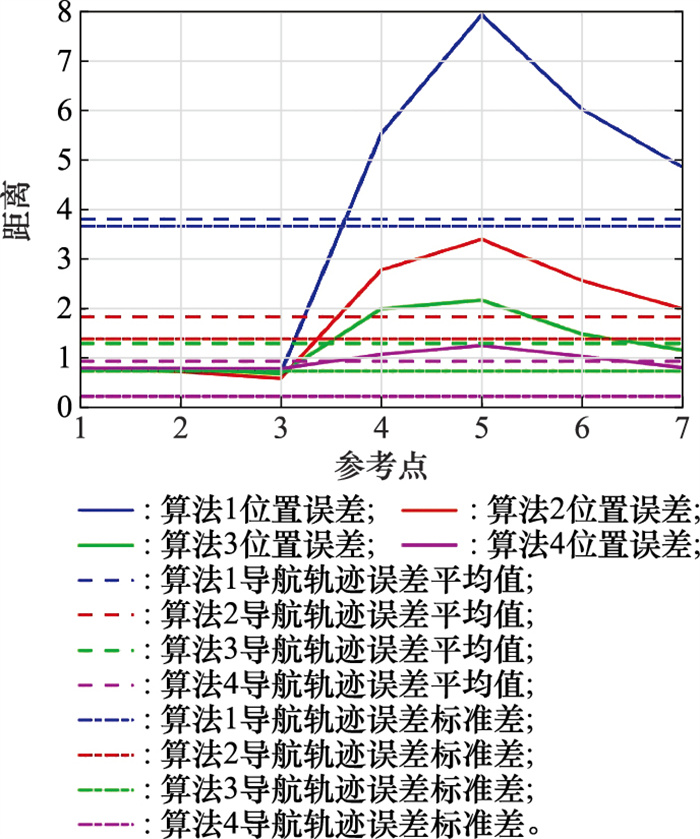

Fig.7
Satellite image of playground"

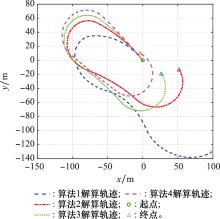
Fig.8
Long distance experimental motion path comparison"
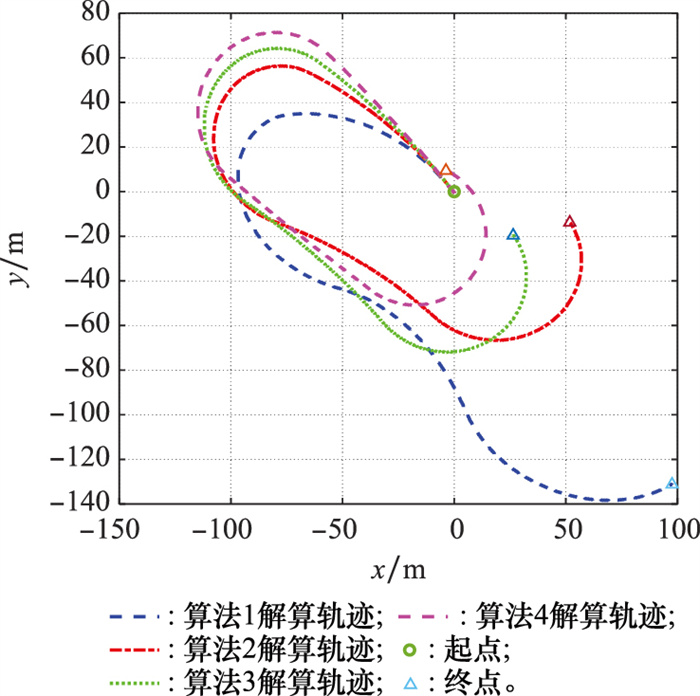
Table 2
Comparison of endpoint position error calculations"
| 算法 | 起点坐标/m | 终点坐标/m | Δr/m | 相对位置误差/% |
| 算法1 | (0, 0) | (97.57, -131.21) | 163.51 | 40.88 |
| 算法2 | (0, 0) | (51.76, -13.81) | 53.57 | 13.40 |
| 算法3 | (0, 0) | (26.42, -19.61) | 32.90 | 8.22 |
| 算法4 | (0, 0) | (-3.71, 9.43) | 10.13 | 2.53 |
| 1 | 宋丽君,路明慧,赵思晗,等.MEMS惯性鞋式行人导航系统[J].飞控与探测,2023,6(5):61-68. |
| SONGL J,LUM H,ZHAOS H,et al.MEMS inertial shoe-mounted pedestrian navigation system[J].Flight Control & Detection,2023,6(5):61-68. | |
| 2 |
SUIJ D,CHANGT S.IMU-based deep stride length estimation with self-supervised learning[J].IEEE Sensors Journal,2021,21(6):7380-7387.
doi: 10.1109/JSEN.2021.3049523 |
| 3 |
VANDERMEERENS,STEENDAMH.Deep-learning-based step detection and step length estimation with a handheld IMU[J].IEEE Sensors Journal,2022,22(24):24205-24221.
doi: 10.1109/JSEN.2022.3219412 |
| 4 |
BOF,LIJ,WANGW B.Mode-independent stride length estimation with IMUs in smartphones[J].IEEE Sensors Journal,2022,22(6):5824-5833.
doi: 10.1109/JSEN.2022.3148313 |
| 5 | 王伟,马晞茗,王敬民,等.基于自适应PDR补偿的UWB/MIMU组合行人定位算法[J].仪表技术与传感器,2023(6):100-108. |
| WANGW,MAX M,WANGJ M,et al.UWB/MIMU combined pedestrian location algorithm based on adaptive PDR compensation[J].Instrument Technique and Sensor,2023(6):100-108. | |
| 6 |
WAGNERJ F,KOHLM,GIORGIB.Reevaluation of algorithmic basics for ZUPT based pedestrian navigation[J].IEEE Access,2022,10,118419-118437.
doi: 10.1109/ACCESS.2022.3220629 |
| 7 |
YANGM,ZHUR,XIAOZ L,et al.Symmetrical-net: adaptive zero velocity detection for ZUPT-aided pedestrian navigation system[J].IEEE Sensors Journal,2022,22(6):5075-5085.
doi: 10.1109/JSEN.2021.3094301 |
| 8 | WANGY,SHKELA M.Adaptive threshold for zero-velocity detector in ZUPT-aided pedestrian inertial navigation[J].IEEE Sensors Letters,2019,3(11):7002304. |
| 9 | SUNY J,XUX L,TIANX C,et al.An adaptive zero-velocity interval detector using instep-mounted inertial measurement unit[J].IEEE Trans.on Instrumentation and Measurement,2021,70,8502013. |
| 10 |
WAGSTAFFB,PERETROUKHINV,KELLYJ.Robust data-driven zero-velocity detection for foot-mounted inertial navigation[J].IEEE Sensors Journal,2020,20(2):957-967.
doi: 10.1109/JSEN.2019.2944412 |
| 11 | 黄凤荣,刘庆璘,高敏,等.基于PRCNN-Attention鲁棒零速检测的行人惯性导航方法[J].中国惯性技术学报,2023,31(6):547-554. |
| HUANGF R,LIUQ L,GAOM,et al.Pedestrian inertial navigation method based on PRCNN-Attention robust zero-velocity detection[J].Journal of Chinese Inertial Technology,2023,31(6):547-554. | |
| 12 |
CHENC,ZHAOP,LUC X,et al.Deep-learning-based pedestrian inertial navigation: methods, data set, and on-device inference[J].IEEE Internet of Things Journal,2020,7(5):4431-4441.
doi: 10.1109/JIOT.2020.2966773 |
| 13 | LIZ,XUX B,JIM X,et al.Pedestrian positioning based on dual inertial sensors and foot geometric constraints[J].IEEE Trans.on Industrial Electronics,2022,2022(6):6401-6409. |
| 14 |
LIZ,XUX B,WANGJ S,et al.Prior kinematic information fusion for pedestrian localization with toe-heel shank MIMUs[J].IEEE Trans.on Industrial Electronics,2023,70(7):7498-7506.
doi: 10.1109/TIE.2022.3201278 |
| 15 | 王希彬,戴洪德,全闻捷,等.基于加速度补偿的惯性行人导航非零速区间姿态估计CKF算法[J].系统工程与电子技术,2023,45(9):2894-2901. |
| WANGX B,DAIH D,QUANW J,et al.Nonzero-velocity interval attitude estimation CKF algorithm based on acceleration compensation for inertial pedestrian navigation[J].Systems Engineering and Electronics,2023,45(9):2894-2901. | |
| 16 | 戴洪德,李松林,周绍磊,等.基于伪标准差和N-P准则的行人导航零速检测[J].中国惯性技术学报,2018,26(6):701-707. |
| DAIH D,LIS L,ZHOUS L,et al.Pedestrian navigation zero-velocity detection based on pseudo-standard deviation and N-P criterion[J].Journal of Chinese Inertial Technology,2018,26(6):701-707. | |
| 17 | WANGQ Y,YINJ,NOURELDINA,et al.Research on an improved method for foot-mounted inertial/magnetometer pedestrian-positioning based on the adaptive gradient descent algorithm[J].Sensors,2018,18(12):4105-4122. |
| 18 | QIUS,WANGZ L,ZHAOH Y,et al.Inertial/magnetic sensors based pedestrian dead reckoning by means of multi-sensor fusion[J].Information Fusion,2018,39(C):108-119. |
| 19 | ABDULRAHIMK,HIDEC,MOORET,et al.Aiding low cost inertial navigation with building heading for pedestrian navigation[J].The Journal of Navigation,2011,64(2):219-233. |
| 20 | NILSSONJ O,ZACHARIAHD,SKOGI,et al.Cooperative localization by dual foot-mounted inertial sensors and inter-agent ranging[J].Eurasip Journal on Advances in Signal Processing,2013,2013,164. |
| 21 | 于文昭. 基于UWB/微惯性的协同行人导航技术研究[D]. 哈尔滨: 哈尔滨工业大学, 2020. |
| YU W Z. Research on cooperative pedestrian navigation based on UWB/MIMU[D]. Harbin: Harbin Institute of Technology, 2020. | |
| 22 | 周广涛,王晴晴,高远,等.基于ZIHR航向角修正方法的行人导航算法[J].系统工程与电子技术,2019,41(1):170-177. |
| ZHOUG T,WANGQ Q,GAOY,et al.Pedestrian naviga tion algorithm based on ZIHR heading angle correction me-thod[J].Systems Engineering and Electronics,2019,41(1):170-177. | |
| 23 | 戴洪德,张笑宇,郑百东,等.基于零速修正与姿态自观测的惯性行人导航算法[J].北京航空航天大学学报,2022,48(7):1135-1144. |
| DAIH D,ZHANGX Y,ZHENGB D,et al.Inertial pedestrian navigation algorithm based on zero velocity update and attitude self-observation[J].Journal of Beijing University of Aeronautics and Astronautics,2022,48(7):1135-1144. | |
| 24 | WAHLSTRÖMJ,SKOGI.Fifteen years of progress at zero velocity: a review[J].IEEE Sensors Journal,2021,21(2):1139-1151. |
| 25 | SHIX,WANGZ L,ZHAOH Y,et al.Threshold-free phase segmentation and zero velocity detection for gait analysis using foot-mounted inertial sensors[J].IEEE Trans.on Human-Machine Systems,2022,53(1):176-186. |
| 26 | 李磊,苏中,吴学佳,等.粒子群优化噪声参数的行人导航零速修正算法[J].传感技术学报,2024,37(1):42-49. |
| LIL,SUZ,WUX J,et al.Zero velocity update algorithm for pedestrian navigation based on particle swarm optimization[J].Chinese Journal of Sensors and Actuators,2024,37(1):42-49. | |
| 27 | GUIJ,ZHAOH M,XUX,et al.Heading constraint algorithm for foot-mounted PNS using low-cost IMU[J].Journal of Systems Engineering and Electronics,2022,33(3):727-736. |
| 28 |
戴洪德,马宇峰,戴邵武,等.航向误差非线性预测的惯性行人导航零速修正算法[J].系统工程与电子技术,2023,45(8):2555-2561.
doi: 10.12305/j.issn.1001-506X.2023.08.30 |
|
DAIH D,MAY F,DAIS W,et al.Zero velocity update algorithm for inertial pedestrian navigation based on nonlinear prediction of heading error[J].Systems Engineering and Electronics,2023,45(8):2555-2561.
doi: 10.12305/j.issn.1001-506X.2023.08.30 |
|
| 29 | 周绍磊,李松林,戴洪德,等.一种优化高度通道的行人导航算法[J].海军航空工程学院学报,2018,33(5):479-485. |
| ZHOUS L,LIS L,DAIH D,et al.A pedestrian navigation algorithm with improved height channel[J].Journal of Naval Aeronautical and Astronautical University,2018,33(5):479-485. | |
| 30 | YANF,LIS,ZHANGE Z,et al.An intelligent adaptive Kalman filter for integrated navigation systems[J].IEEE Access,2020,8,213306-213317. |
| [1] | Weihong FU, Yufei ZHOU, Xinyu ZHANG, Naian LIU. Single-channel blind source separation algorithm based on parameter estimation and Kalman filter [J]. Systems Engineering and Electronics, 2024, 46(8): 2850-2856. |
| [2] | Shoujian ZHANG, Mingzhen GUI. Navigation method using angle/velocity measurement based on GPR-UKF [J]. Systems Engineering and Electronics, 2024, 46(12): 4183-4191. |
| [3] | Yunlong ZHAO, Qian SUN, Xin JIAN, Yibing LI, Fe YU. INS/5G integrated navigation method based on improved EMD-CIIT denoising algorithm [J]. Systems Engineering and Electronics, 2024, 46(12): 4203-4212. |
| [4] | Hongde DAI, Yufeng MA, Shaowu DAI, Baidong ZHENG, Xiaoyu ZHANG. Zero velocity update algorithm for inertial pedestrian navigation based on nonlinear prediction of heading error [J]. Systems Engineering and Electronics, 2023, 45(8): 2555-2561. |
| [5] | Yikang HE, Wenhan ZHANG, Zhenhua WANG, Wen HE. Solar cell array rotation angle estimation method for satellite emergency recovery [J]. Systems Engineering and Electronics, 2023, 45(3): 797-805. |
| [6] | Baojie CAI, Lei SHAO. Robust filtering algorithm based on three discriminant domain and least squares fitting [J]. Systems Engineering and Electronics, 2021, 43(5): 1346-1353. |
| [7] | LIU Songtao, WANG Zhan, WEI Baoyan. Image tracking system for conventional moving target and abrupt maneuvering target [J]. Systems Engineering and Electronics, 2019, 41(8): 1692-1698. |
| [8] | ZOU Zisheng, CONG Shuang, SHANG Weiwei, CHEN Ding. State filtering and controller design for fine tracking system in quantum positioning [J]. Systems Engineering and Electronics, 2019, 41(3): 601-610. |
| [9] | GE Baoshuang, ZHANG Hai, JIN Yanqiong. Redundant measurement based method for online mitigation of GNSS multipath errors [J]. Systems Engineering and Electronics, 2019, 41(11): 2581-2587. |
| [10] | HU Jie, ZHU Yixian, SHI Xiaozhu. Estimation of azimuth gyro drifts with single-axis rotational SINS [J]. Systems Engineering and Electronics, 2018, 40(10): 2334-2339. |
| [11] | LI Ye1, GUO Jianguo1, ZHAO Bin1, YOU YuHua2, LU Xiaodong1, ZHOU Jun1. Aircraft dynamicsaided MEMS inertial navigation system [J]. Systems Engineering and Electronics, 2016, 38(8): 1880-1885. |
| [12] | GAO Wei1, SHAN Wei1, XU Bo1, CHENG Zhengsheng2. Transfer alignment of platform inertial navigation#br# in the inertial coordinate [J]. Systems Engineering and Electronics, 2015, 37(5): 1151-1156. |
| [13] | WANG Qiang, ZHANG An, ZHANG Yanxia. Realtime method of UAV path planning based onheuristic predictive window [J]. Systems Engineering and Electronics, 2015, 37(10): 2279-2285. |
| [14] | WU Wei-hua,JIANG Jing,FAN Xiong-hua,YUAN Jun-quan. Filtering algorithms of passive location based on PDR/DFR by single airborne platform in WGS-84 [J]. Systems Engineering and Electronics, 2014, 36(1): 31-37. |
| [15] | FENG Zhihua, GAO Shesheng, CHEN Lirong, JIAO Yalin. Random weighting fitting method of systemic errors and covariance matrices in dynamic model [J]. Journal of Systems Engineering and Electronics, 2012, 34(2): 348-352. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||