Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (4): 1222-1234.doi: 10.12305/j.issn.1001-506X.2025.04.19
• Systems Engineering • Previous Articles Next Articles
UAV swarm anti-artillery search path planning based on artillery transfer path prediction
Ze GENG, Yanyan HUANG, Han ZHANG
- School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China
-
Received:2024-04-16Online:2025-04-25Published:2025-05-28 -
Contact:Yanyan HUANG
CLC Number:
Cite this article
Ze GENG, Yanyan HUANG, Han ZHANG. UAV swarm anti-artillery search path planning based on artillery transfer path prediction[J]. Systems Engineering and Electronics, 2025, 47(4): 1222-1234.
share this article
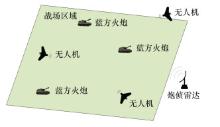
Fig.1
Schematic diagram of unmanned aerial vehicle swarm anti-artillery combat"
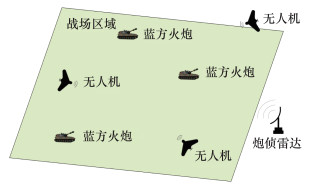
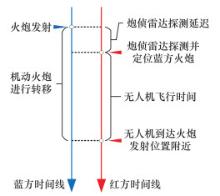
Fig.2
Timeline of combat operation"
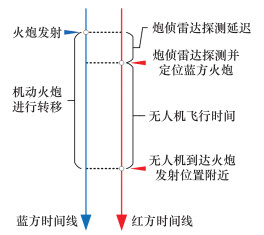
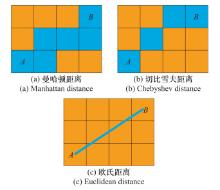
Fig.3
Different grid distance definitions"
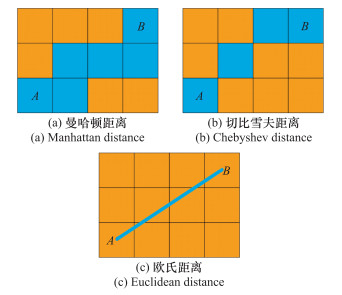
Table 1
Level of suitability and suitability values"
| 适宜程度 | 适宜度f取值 | 描述 |
| 优 | 4 | 该项作战活动在该地貌环境下进行时取得最大效能 |
| 良 | 3 | 该项作战活动能够顺利在该地貌环境下进行, 效能良好 |
| 中等 | 2 | 该项作战活动能够在该地貌环境下进行, 效能一般 |
| 较差 | 1 | 该项作战活动在该地貌环境下进行时存在困难, 效能低下 |
| 差 | 0 | 该项作战活动无法在该地貌环境下进行 |
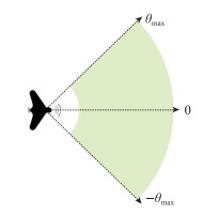
Fig.4
Range of possible unmanned aerial vehicle flight paths"
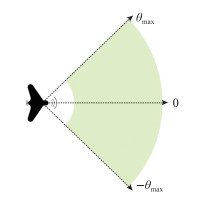
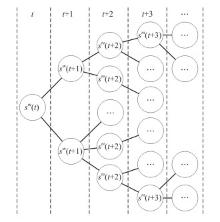
Fig.5
State transfer sequences obtained by recursion"
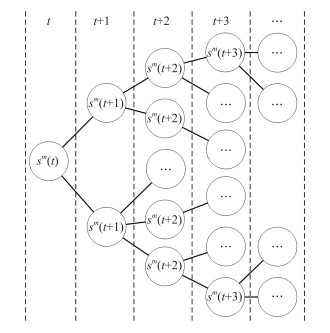
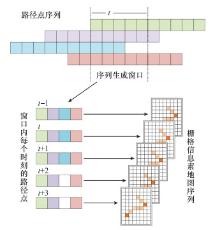
Fig.6
Schematic diagram of generation of grid pheromone map sequence"
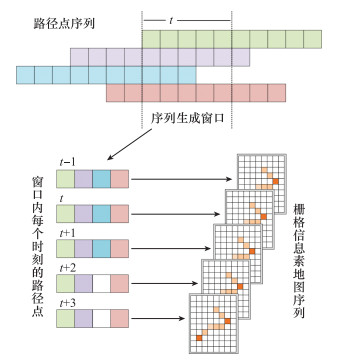
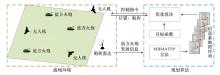
Fig.7
Structure of unmanned aerial vehicle swarm search path planning algorithm"
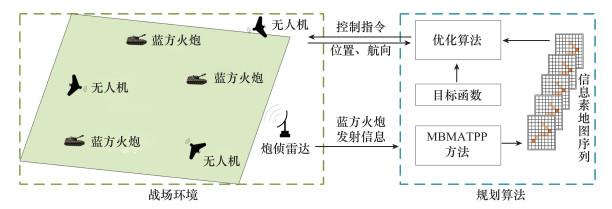
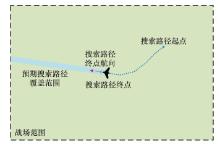
Fig.8
Schematic diagram of expected search area"
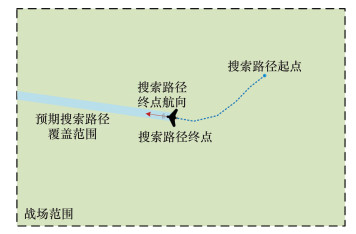
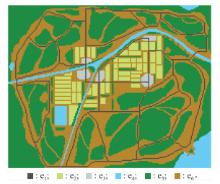
Fig.9
Mission areas"
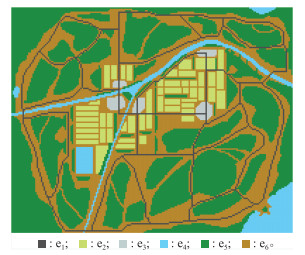
Table 2
Battlefield environment and operational element parameters"
| 参数 | 取值 | 参数 | 取值 | |
| a | 200 | δ | 0.5 | |
| b | 160 | Tr/Δt | 1 | |
| l/m | 50 | vu/(l·Δt-1) | 4 | |
| Δt/s | 30 | θmax/(°) | 45 | |
| αc | 1.33 | r/l | 1.5 | |
| $\epsilon$ | 0.8 | - | - |
Table 3
PSO algorithm parameters"
| 参数 | 取值 | 参数 | 取值 | |
| 输入维度 | 5 | w | 0.8 | |
| 种群数量 | 20 | c1 | 0.5 | |
| 最大迭代次数 | 200 | c2 | 0.5 |
Table 4
Path planning algorithm parameters"
| 参数 | 取值 | 参数 | 取值 | |
| α1 | 3 | ω3 | 1 | |
| β1 | 8.7 | dset/l | 15 | |
| α2 | 2.7 | Tp/Δt | 1 | |
| β2 | 2.2 | Tf/Δt | 5 | |
| p12 | 1 | σ1 | 1.8 | |
| p21 | 1 | σ2 | 1 | |
| d | 14 | σ3 | -30 | |
| ω1 | 1.5 | dp | 5 | |
| ω2 | 10 | - | - |
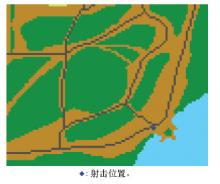
Fig.10
Firing position"
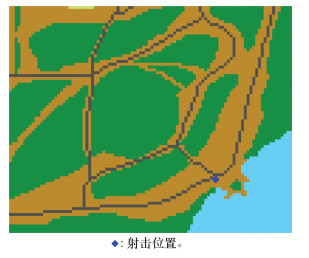
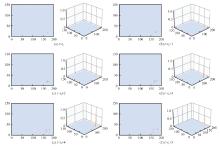
Fig.11
MBMATPP method grid pheromone map sequence"
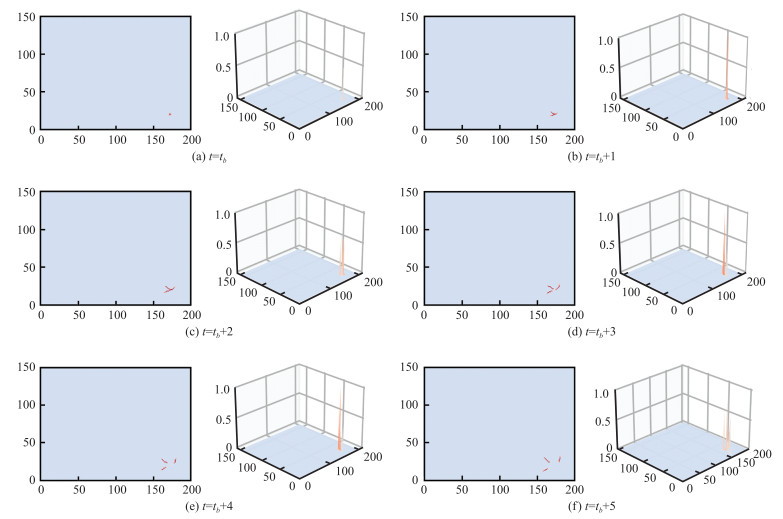

Fig.12
Grid pheromone map obtained by M-RM-DCSD method"
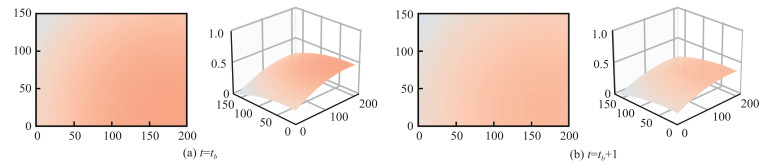
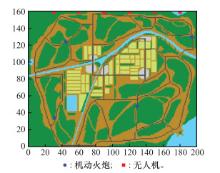
Fig.13
Initial position of mobile artillery and unmanned aerial vehicles"
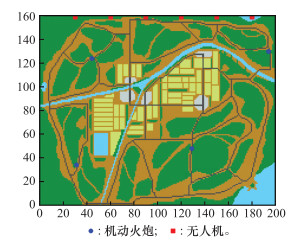
Table 5
Initial position of mobile artillery and unmanned aerial vehicles"
| 编号 | 位置坐标 | 航向/(°) |
| 自行火炮1 | (44, 124) | - |
| 自行火炮2 | (31, 34) | - |
| 自行火炮3 | (194, 130) | - |
| 自行火炮4 | (129, 48) | - |
| 无人机1 | (40, 160) | -90 |
| 无人机2 | (80, 160) | -90 |
| 无人机3 | (120, 160) | -90 |
| 无人机4 | (160, 160) | -90 |
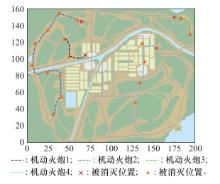
Fig.14
Transfer paths of mobile artillery"
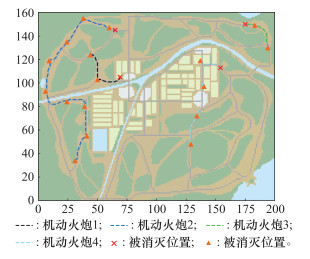
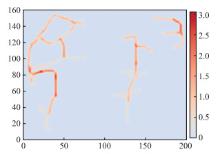
Fig.15
Cumulative distribution of existential pheromones"
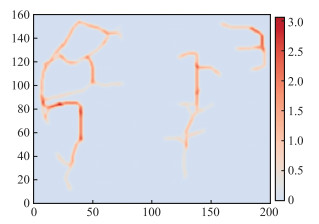
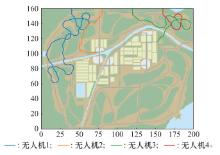
Fig.16
Unmanned aerial vehicles search paths"
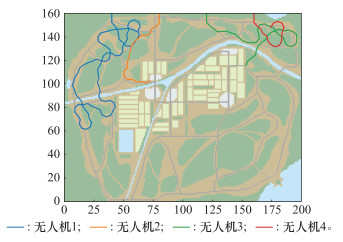
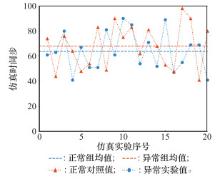
Fig.17
Simulation time results of anomaly experiments"
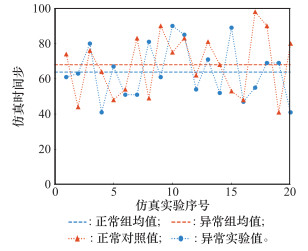
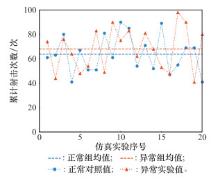
Fig.18
Shot counts results of anomaly experiments"
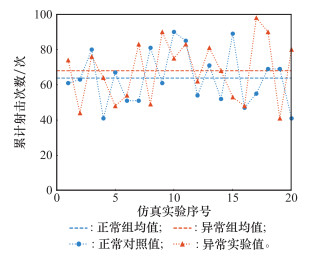
Table 6
Results of anomaly experiments"
| 实验结果 | 对照组 | 实验组 |
| 仿真时间步均值 | 63.90 | 68.05 |
| 仿真时间步标准差 | 14.87 | 16.91 |
| 累计射击次数均值 | 36.85 | 38.95 |
| 累计射击次数标准差 | 5.90 | 7.85 |
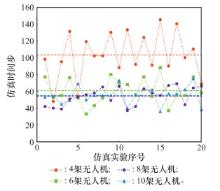
Fig.19
Simulation time steps required to destroy all mobile artillery"
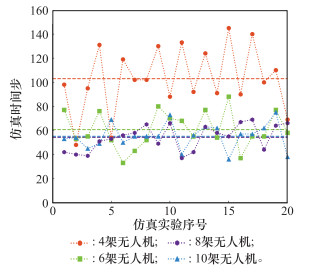
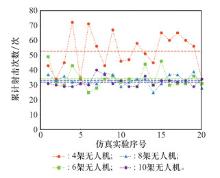
Fig.20
Cumulative number of shots from artillery"
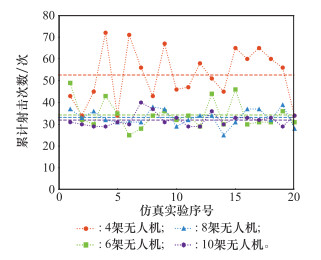
Table 7
Results for different numbers of unmanned aerial vehicles"
| 实验结果 | 集群中无人机数量 | |||
| 4 | 6 | 8 | 10 | |
| 仿真时间步均值 | 103.05 | 60.75 | 55.20 | 54.20 |
| 仿真时间步标准差 | 26.11 | 14.70 | 10.32 | 10.38 |
| 累计射击次数均值 | 52.60 | 34.30 | 33.20 | 31.95 |
| 累计射击次数标准差 | 11.85 | 6.25 | 3.60 | 2.94 |
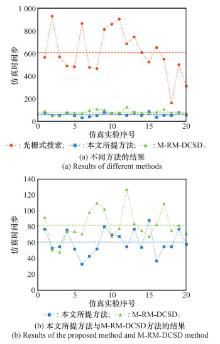
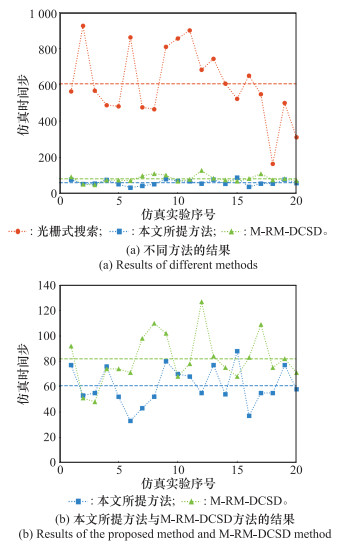
Fig.21
Comparison of different methods"
| 1 |
MOHAMMAD S , HIMANSHU M , SHREYA P , et al. Routing and scheduling optimization for UAV assisted delivery system: a hybrid approach[J]. Applied Soft Computing, 2022, 126, 109225.
doi: 10.1016/j.asoc.2022.109225 |
| 2 |
WANG G H , WANG F M , WANG J H , et al. Collaborative target assignment problem for large-scale UAV swarm based on two-stage greedy auction algorithm[J]. Aerospace Science and Technology, 2024, 149, 109146.
doi: 10.1016/j.ast.2024.109146 |
| 3 |
LAGHARI A A , JUMANI A K , LAGHARI R A , et al. Unmanned aerial vehicles: a review[J]. Cognitive Robotics, 2023, 3, 8- 22.
doi: 10.1016/j.cogr.2022.12.004 |
| 4 |
SHAO R , TAO R T , LIU Y D , et al. UAV cooperative search in dynamic environment based on hybrid-layered APF[J]. EURASIP Journal on Advances in Signal Processing, 2021, 2021 (1): 101.
doi: 10.1186/s13634-021-00807-6 |
| 5 |
HU J Q , WU H S , ZHAN R J , et al. Self-organized search-attack mission planning for UAV swarm based on wolf pack hunting behavior[J]. Journal of Systems Engineering and Electro-nics, 2021, 32 (6): 1463- 1476.
doi: 10.23919/JSEE.2021.000124 |
| 6 |
ZHANG C Q , ZHOU W J , QIN W D , et al. A novel UAV path planning approach: heuristic crossing search and rescue optimization algorithm[J]. Expert Systems with Applications, 2023, 215, 119243.
doi: 10.1016/j.eswa.2022.119243 |
| 7 |
WANG Z Q , LI J , LI J , et al. A decentralized decision-making algorithm of UAV swarm with information fusion strategy[J]. Expert Systems with Applications, 2024, 237, 121444.
doi: 10.1016/j.eswa.2023.121444 |
| 8 |
LI Y B , ZHANG Z T , SUN Q , et al. A distributed framework for multiple UAV cooperative target search under dynamic environment[J]. Journal of the Franklin Institute, 2024, 361 (8): 106810.
doi: 10.1016/j.jfranklin.2024.106810 |
| 9 |
ALFEO A L , CIMINO M G C A , DE F N , et al. Design and simulation of the emergent behavior of small drones swarming for distributed target localization[J]. Journal of Computational Science, 2018, 29, 19- 33.
doi: 10.1016/j.jocs.2018.09.014 |
| 10 | SHAO Y , ZHAO Z F , LI R P , et al. Target detection for multi-UAVs via digital pheromones and navigation algorithm in unknown environments[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21 (5): 796- 808. |
| 11 | RYAN D , JOHN S . A framework for multi-UAV persistent search and retrieval with stochastic target appearance in a continuous space[J]. Journal of Intelligent & Robotic Systems, 2021, 103 (4): 65. |
| 12 |
DANILO S , LEONARDO C , LORENZO F . Multitrajectory model predictive control for safe UAV navigation in an unknown environment[J]. IEEE Trans.on Control Systems Technology, 2023, 31 (5): 1982- 1997.
doi: 10.1109/TCST.2022.3216989 |
| 13 |
YAO P , WEI X . Multi-UAV information fusion and cooperative trajectory optimization in target search[J]. IEEE Systems Journal, 2022, 16 (3): 4325- 4333.
doi: 10.1109/JSYST.2021.3117959 |
| 14 | LI Y B, ZHANG S T, CHEN J, et al. Multi-UAV cooperative mission assignment algorithm based on ACO method[C]//Proc. of the IEEE International Conference on Computing, Networking and Communications, 2020: 304-308. |
| 15 | 文超, 董文瀚, 解武杰, 等. 基于回访机制的无人机集群分布式协同区域搜索方法[J]. 航空学报, 2023, 44 (11): 253- 270. |
| WEN C , DONG W H , XIE W J , et al. Distributed cooperative area search method for UAV swarms based on revisit mechanism[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (11): 253- 270. | |
| 16 |
XU C , XU M , YIN C J . Optimized multi-UAV cooperative path planning under the complex confrontation environment[J]. Computer Communications, 2020, 162, 196- 203.
doi: 10.1016/j.comcom.2020.04.050 |
| 17 | TAREK M, ABOSREA M, ELNAGAR A R, et al. Design and implementation of a cymbeline radar signal processor with waveform generator to detect small RCS artillery bombs on a single FPGA chip[C]//Proc. of the International Undergraduate Research Conference, 2021, 5(5): 277-280. |
| 18 | SWIETOCHOWSKI N . Rules of artillery employment in combat operations[J]. Scientific Journal of the Military University of Land Forces, 2019, 51 (2): 280- 293. |
| 19 | 陈雅茜, 高亦远, 葛荣存, 等. 一种提高栅格成本距离分析准确性的改进算法[J]. 地理与地理信息科学, 2020, 36 (3): 18- 24. |
| CHEN Y X , GAO Y Y , GE R C , et al. An improved algorithm for increasing the accuracy of raster cost distance analysis[J]. Geography and Geo-Information Science, 2020, 36 (3): 18- 24. | |
| 20 | JING X R, YANG X J. Application and improvement of heuristic function in A* algorithm[C]//Proc. of the IEEE 37th Chinese Control Conference, 2018: 2191-2194. |
| 21 | ZHANG P Q, HUA Y H, LI T. Dynamic trajectory planning and tracking algorithm of lunar rover with updating map information[C]//Proc. of the IEEE China Automation Congress, 2022: 4024-4029. |
| 22 | WANG H W , QI X Y , LOU S J , et al. An efficient and robust improved A* algorithm for path planning[J]. Symmetry, 2021, 13 (11): 2213. |
| 23 | 孟光磊, 李树发, 刘彬斌, 等. 防空预警雷达高原环境适应性评估的自学习模糊灰度方法[J]. 兵工学报, 2022, 43 (1): 98- 110. |
| MENG G L , LI S F , LIU B B , et al. Self-learning fuzzy grey method for plateau environmental adaptability assessment of air defense early-warning radar[J]. Acta Armamentarii, 2022, 43 (1): 98- 110. | |
| 24 | SHAO Y , ZHAO Z F , LI R P , et al. Target detection for multi-UAVs via digital pheromones and navigation algorithm in unknown environments[J]. Frontiers of Information Technology & Electronic Engineering, 2020, 21 (5): 796- 808. |
| 25 | FEI B W , BAO W D , ZHU X M , et al. Autonomous cooperative search model for multi-UAV with limited communication network[J]. IEEE Internet of Things Journal, 2022, 9 (19): 19346- 19361. |
| 26 | 谢黎焱. 基于马尔柯夫过程的自行炮兵机动作战研究[J]. 指挥控制与仿真, 2010, 32 (4): 16-20, 27. |
| XIE L Y . Research on maneuvering combat of self-propelled cannon based on Markov[J]. Command Control & Simulation, 2010, 32 (4): 16-20, 27. | |
| 27 | 方兆本, 缪柏其. 随机过程[M]. 北京: 科学出版社, 2011. |
| FANG Z B , MIAO B Q . Stochastic process[M]. Beijing: China Science Publishing, 2011. | |
| 28 | SCHWENZER M , AY M , BERGS T , et al. Review on model predictive control: an engineering perspective[J]. The International Journal of Advanced Manufacturing Technology, 2021, 117, 1327- 1349. |
| 29 | ALANEZI M A , BOUCHEKARA H R E H , APALARA T A , et al. Dynamic target search using multi-UAVs based on motion-encoded genetic algorithm with multiple parents[J]. IEEE Access, 2022, 10, 77922- 77939. |
| 30 | LI B , SONG C , BAI S X , et al. Multi-UAV trajectory planning during cooperative tracking based on a fusion algorithm integrating MPC and standoff[J]. Drones, 2023, 7 (3): 196. |
| 31 | WANG Z J , ZHAN Z H , KWONG S , et al. Adaptive granula-rity learning distributed particle swarm optimization for large-scale optimization[J]. IEEE Trans.on Cybernetics, 2020, 51 (3): 1175- 1188. |
| [1] | Wenhao BI, Mengqi ZHANG, Fei GAO, Mi YANG, An ZHANG. Review on UAV swarm task allocation technology [J]. Systems Engineering and Electronics, 2024, 46(3): 922-934. |
| [2] | Tao LIU, Shasha WANG, Chi ZHANG, Guanghan BAI, Junyong TAO. Resilience based self-organizing region coverage method for unmanned aerial vehicle swarm [J]. Systems Engineering and Electronics, 2024, 46(3): 942-952. |
| [3] | Cheng GAO, Yanli DU, Yunong BU, Yanbin LIU, Yufei WANG. Heterogeneous UAV swarm grouping deployment for complex multiple tasks [J]. Systems Engineering and Electronics, 2024, 46(3): 972-981. |
| [4] | Yaxuan YIN, An ZHANG, Wenhao BI, Pan YANG, Zhanjun HUANG. Flocking control for quadrotor unmanned aerial vehicle swarm with dynamic topology [J]. Systems Engineering and Electronics, 2024, 46(10): 3473-3483. |
| [5] | Xiaogang QI, Yutong ZHOU, Lifang LIU. Evaluation of the reliability of UAV swarm for ground combat missions [J]. Systems Engineering and Electronics, 2023, 45(9): 2971-2978. |
| [6] | Shuheng ZHANG, Ruping ZHAI, Yongkai LIU. Identification of UAV swarm type based on fusion features of communication and radar domain [J]. Systems Engineering and Electronics, 2023, 45(12): 3734-3742. |
| [7] | Ruping ZHAI, Shuheng ZHANG, Jiarong PING. Waveform recognition of unmanned aerial vehicle swarm communication in complex multipath environment [J]. Systems Engineering and Electronics, 2023, 45(10): 3312-3320. |
| [8] | Xuping GU, Daquan TANG. Hierarchical cooperative navigation of UAV swarm based on federated filtering algorithm [J]. Systems Engineering and Electronics, 2022, 44(3): 967-976. |
| [9] | Xingjia YANG, Keqing DUAN, Xiang LI, Wei QI. Resolving range ambiguity for cooperative detection using UAV swarms [J]. Systems Engineering and Electronics, 2022, 44(2): 480-489. |
| [10] | Xiaowei FU, Jing PAN. Distributed formation control of UAV swarm with dynamic obstacle avoidance [J]. Systems Engineering and Electronics, 2022, 44(2): 529-537. |
| [11] | Yang ZHANG, Guangya SI, Yanzheng WANG. Simulation of unmanned aerial vehicle swarm electromagnetic operation concept [J]. Systems Engineering and Electronics, 2020, 42(7): 1510-1518. |
| [12] | ZHANG Yang, SI Guangya, WANG Yanzheng. Modeling of cooperative target allocation of the UAV swarm cyberspace attack action [J]. Systems Engineering and Electronics, 2019, 41(9): 2025-2033. |
| [13] |
GAO Yang, LI Dongsheng.
Swarm situation perception consensus evaluation via intervalnumber Heronian operators with variable weights
[J]. Systems Engineering and Electronics, 2019, 41(1): 89-95.
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||