Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (2): 580-590.doi: 10.12305/j.issn.1001-506X.2025.02.24
• Guidance, Navigation and Control • Previous Articles
Cooperative guidance method of high lift-to-drag ratio aircraft based on sliding mode control
Bo GUO1, Ming TIE1,*, Wenhui FAN2, Chuanxu LI1
- 1. Science and Technology on Space Physics Laboratory, Beijing 100076, China
2. Department of Automation, Tsinghua University, Beijing 100084, China
-
Received:2024-01-08Online:2025-02-25Published:2025-03-18 -
Contact:Ming TIE
CLC Number:
Cite this article
Bo GUO, Ming TIE, Wenhui FAN, Chuanxu LI. Cooperative guidance method of high lift-to-drag ratio aircraft based on sliding mode control[J]. Systems Engineering and Electronics, 2025, 47(2): 580-590.
share this article

Fig.1
Aircraft guidance geometry"

Table 1
Initial conditions for three aircrafts"
| 参数 | 飞行器1 | 飞行器2 | 飞行器3 |
| 高度/km | 36.11 | 36.21 | 36.32 |
| 速度/(m/s-1) | 4 973.60 | 4 974.80 | 4 977.50 |
| 经度/(°) | 105.45 | 101.81 | 98.67 |
| 纬度/(°) | 42.19 | 38.88 | 26.98 |
| 航迹倾角/(°) | -13.90 | -13.80 | -13.80 |
| 航向角/(°) | 118.10 | 111.60 | 97.80 |
Table 2
Target point and terminal constraint of aircraft"
| 参数 | 取值 |
| 经度/(°) | 144.75 |
| 纬度/(°) | 13.50 |
| 高度H/km | 28≤H≤32 |
| S*/km | 140 |
Table 3
Value of control parameter M of three aircrafts"
| 飞行器编号 | M值 |
| 飞行器1 | 70.22 |
| 飞行器2 | 15.79 |
| 飞行器3 | 32.07 |
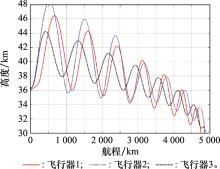
Fig.2
Range-altitude flight profiles of three aircrafts"


Fig.3
Longitude and latitude trajectories of three aircrafts"


Fig.4
Altitudes of three aircrafts varying with time"


Fig.5
Velocities of three aircrafts varying with time"


Fig.6
Process constraints of three aircrafts varying with time"


Fig.7
Tilt angles of three aircrafts varying with time"


Fig.8
Attack angles of three aircrafts varying with time"
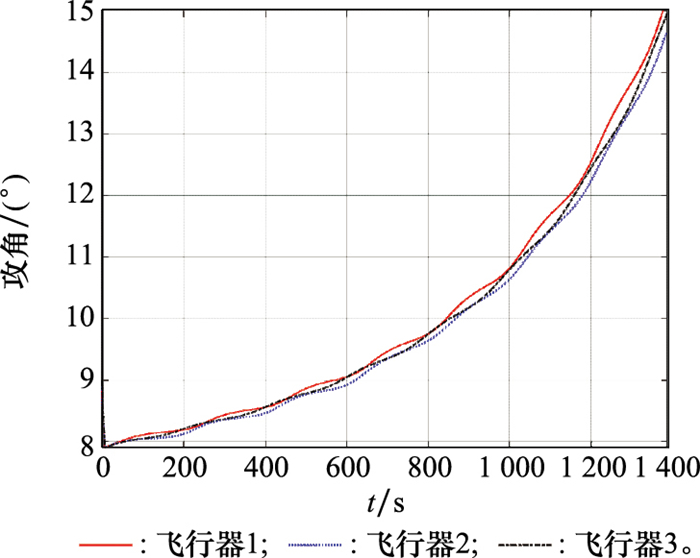
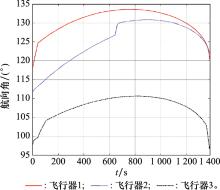
Fig.9
Course angles of three aircrafts varying with time"
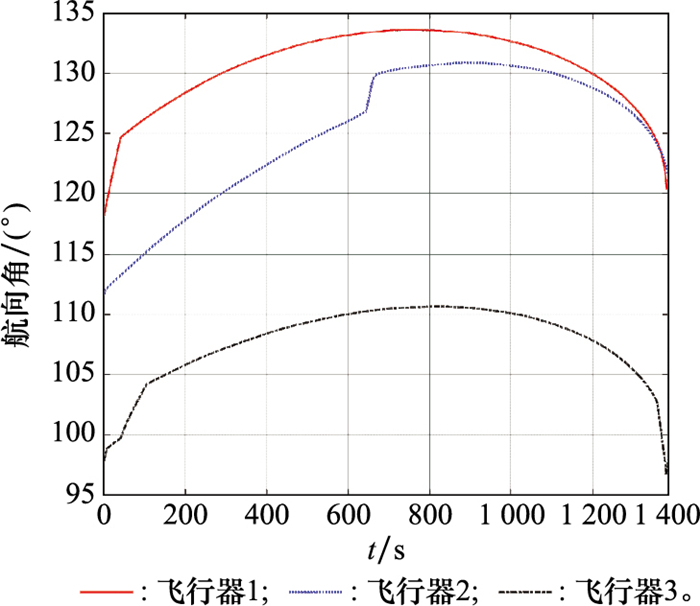

Fig.10
Lead angle of three aircrafts varying with time"

Table 4
Terminal status of three aircrafts"
| 参数 | 飞行器1 | 飞行器2 | 飞行器3 |
| 飞行时间/s | 1 385.500 0 | 1 385.400 0 | 1 387.000 0 |
| 终点经度/(°) | 143.646 7 | 143.649 0 | 143.473 4 |
| 终点纬度/(°) | 14.159 2 | 14.162 2 | 13.709 9 |
| S*/km | 139.880 0 | 139.840 0 | 139.900 0 |
| 到达时间偏差/s | 0.5 | 0.5 | 1.0 |

Fig.11
Range-altitude flight profiles of three aircrafts (comparison method)"

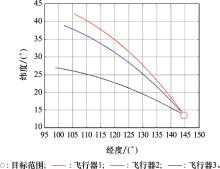
Fig.12
Longitude and latitude trajectories of three aircrafts (comparison method)"


Fig.13
Process constraints of three aircrafts varying with time (comparison method)"


Fig.14
Attack angles of three aircrafts varying with time (comparison method)"


Fig.15
Tilt angles of three aircrafts varying with time (comparison method)"


Fig.16
Trajectory inclination angles of three aircrafts varying with time (comparison method)"


Fig.17
Range-altitude profiles of three aircrafts controlled by PID"


Fig.18
Process constraints of three aircrafts controlled by PID varying with time"
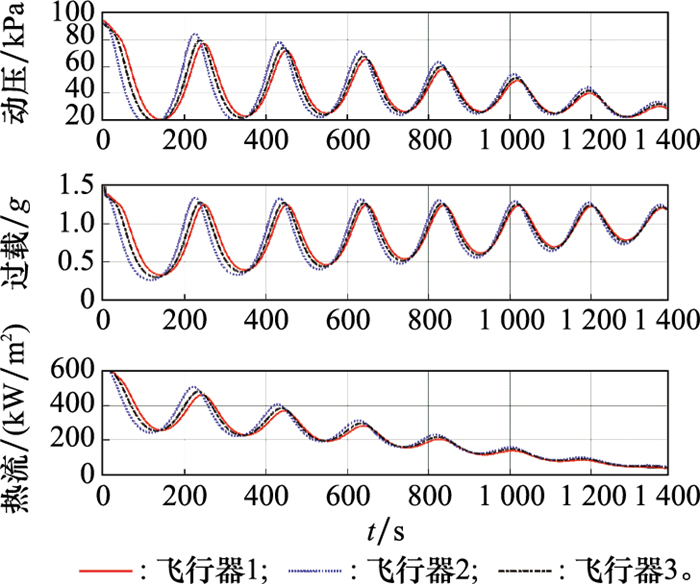

Fig.19
Tilt angles of three aircrafts controlled by PID varying with time"
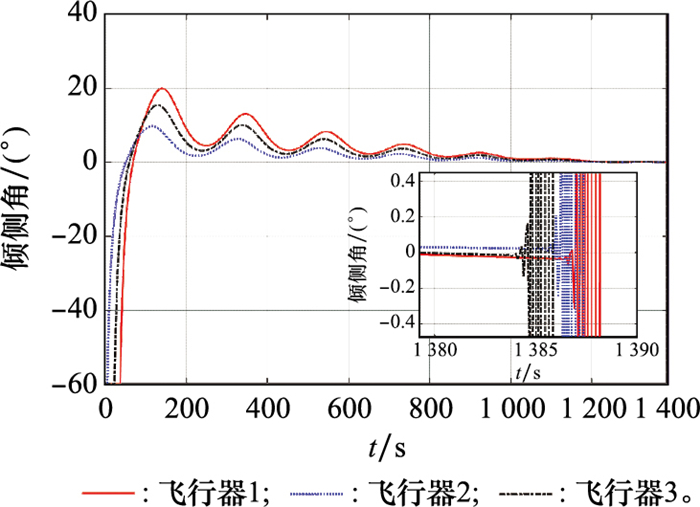
Table 5
Initial deviations and external disturbances"
| 偏差因素 | 取值 |
| 初始经度/(°) | 0.01 |
| 初始纬度/(°) | 0.01 |
| 阻力系数/% | 3 |
| 升力系数/% | 1 |
| 大气密度/% | 1 |
| 飞行器质量/kg | 2 |

Fig.20
Altitude of aircraft 3 varying with time under disturbed condition"


Fig.21
Aircraft arrival time deviation probability density distribution"

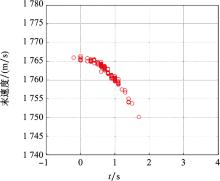
Fig.22
Final velocity corresponding to arrival time deviation of aircraft"

| 1 |
DING Y B , YUE X K , CHEN G S , et al. Review of control and guidance technology on hypersonic vehicle[J]. Chinese Journal of Aeronautics, 2022, 35 (7): 1- 18.
doi: 10.1016/j.cja.2021.10.037 |
| 2 | WU T C , WANG H L , LIU Y H , et al. Learning-based interfered fluid avoidance guidance for hypersonic reentry vehicles with multiple constraints[J]. ISA Transactions, 2023, 139 (8): 291- 307. |
| 3 |
JIA X , WU S T , WEN Y M , et al. A distributed decision method for missiles autonomous formation based on potential game[J]. Journal of Systems Engineering and Electronics, 2019, 30 (4): 738- 748.
doi: 10.21629/JSEE.2019.04.11 |
| 4 | LIANG Z X , REN Z , LI Q D . Evolved atmospheric entry corridor with safety factor[J]. Acta Astronautica, 2018, 143 (2): 82- 91. |
| 5 | ZHANG D , LIU L , WANG Y J . On-line reentry guidance algorithm with both path and no-fly zone constraints[J]. Acta Astronautica, 2015, 117 (12): 243- 253. |
| 6 | YOU H , CHANG X L , ZHAO J F , et al. Three-dimensional impact-angle-constrained cooperative guidance strategy against maneuvering target[J]. ISA Transactions, 2023, 138 (7): 262- 280. |
| 7 |
ZHAO J , ZHOU R , DONG Z N . Three-dimensional cooperative guidance laws against stationary and maneuvering targets[J]. Chinese Journal of Aeronautics, 2015, 28 (4): 1104- 1120.
doi: 10.1016/j.cja.2015.06.003 |
| 8 | SONG J H , SONG S M , XU S L . Three-dimensional cooperative guidance law for multiple missiles with finite-time convergence[J]. Aerospace Science and Technology, 2017, 67 (8): 193- 205. |
| 9 | WANG X H , LU X . Three-dimensional impact angle constrai-ned distributed guidance law design for cooperative attacks[J]. ISA Transactions, 2018, 73 (2): 79- 90. |
| 10 |
LI J F , ZHOU J X , YAO J F , et al. Experimental observations of communication in blackout, topological waveguiding and Dirac zero-index property in plasma sheath[J]. Nanophotonics, 2023, 12 (10): 1847- 1856.
doi: 10.1515/nanoph-2022-0800 |
| 11 |
LEE J I , JEON I S , TAHK M J . Guidance law to control impact time and angle[J]. IEEE Trans.on Aerospace and Electronic Systems, 2007, 43 (1): 301- 310.
doi: 10.1109/TAES.2007.357135 |
| 12 |
KIM T H , LEE C H , JEON I S , et al. Augmented polynomial guidance with impact time and angle constraints[J]. IEEE Trans.on Aerospace and Electronic Systems, 2013, 49 (4): 2806- 2817.
doi: 10.1109/TAES.2013.6621856 |
| 13 |
JEON I S , LEE J I , TAHK M J . Impact-time-control guidance law for anti-ship missiles[J]. IEEE Trans.on Control Systems Technology, 2006, 14 (2): 260- 266.
doi: 10.1109/TCST.2005.863655 |
| 14 | GUO Y H , LI X , ZHANG H J , et al. Entry guidance with terminal time control based on quasi-equilibrium glide condition[J]. IEEE Trans.on Aerospace and Electronic Systems, 2019, 56 (2): 887- 896. |
| 15 | LI Z H , HE B , WANG M H , et al. Time-coordination entry guidance for multi-hypersonic vehicles[J]. Aerospace Science and Technology, 2019, 89 (6): 123- 135. |
| 16 | 王肖, 郭杰, 唐胜景, 等. 基于解析剖面的时间协同再入制导[J]. 航空学报, 2019, 40 (3): 239- 250. |
| WANG X , GUO J , TANG S J , et al. Time-cooperative entry guidance based on analytical profile[J]. Acta Aeronautica et Astronautica Sinica, 2019, 40 (3): 239- 250. | |
| 17 | 周宏宇, 王小刚, 单永志, 等. 基于改进粒子群算法的飞行器协同轨迹规划[J]. 自动化学报, 2022, 48 (11): 2670- 2676. |
| ZHOU H Y , WANG X G , SHAN Y Z , et al. Synergistic path planning for multiple vehicles based on an improved particle swarm optimization method[J]. Acta Automatica Sinica, 2022, 48 (11): 2670- 2676. | |
| 18 | YOU H , CHANG X L , ZHAO J F , et al. Three-dimensional impact-angle-constrained fixed-time cooperative guidance algorithm with adjustable impact time[J]. Aerospace Science and Technology, 2023, 141, 108574. |
| 19 | ZHANG W J , FU S N , LI W , et al. An impact angle constraint integral sliding mode guidance law for maneuvering targets interception[J]. Journal of Systems Engineering and Electronics, 2020, 31 (1): 168- 184. |
| 20 | ZHAO F J , YOU H . New three-dimensional secondorder sliding mode guidance law with impact-angle constraints[J]. The Aeronautical Journal, 2020, 124 (1273): 368- 384. |
| 21 | 盛永智, 甘佳豪, 张成新. 弹道可调的落角约束分数阶滑模制导律设计[J]. 航空学报, 2023, 44 (7): 182- 195. |
| SHENG Y Z , GAN J H , ZHANG C X . Fractional order sliding mode guidance law design with trajectory adjustable and terminal angular constraint[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44 (7): 182- 195. | |
| 22 | LI W , WEN Q Q , HE L , et al. Three-dimensional impact angle constrained distributed cooperative guidance law for anti-ship missiles[J]. Journal of Systems Engineering and Electro-nics, 2021, 32 (2): 447- 459. |
| 23 | LYU T , LI C J , GUO Y N , et al. Three-dimensional finite-time cooperative guidance for multiple missiles without radial velocity measurements[J]. Chinese Journal of Aeronautics, 2019, 32 (5): 1294- 1304. |
| 24 | 王雨辰, 王伟, 林时尧, 等. 考虑攻击时间及空间角度约束的三维自适应滑模协同制导律设计[J]. 兵工学报, 2023, 44 (9): 2778- 2790. |
| WANG Y C , WANG W , LIN S Y , et al. Three-dimensional adaptive sliding mode cooperative guidance law with impact time and angle constraints[J]. Acta Armamentarii, 2023, 44 (9): 2778- 2790. | |
| 25 | BAO C Y , WANG P , TANG G J . Integrated method of gui-dance, control and morphing for hypersonic morphing vehicle in glide phase[J]. Chinese Journal of Aeronautics, 2021, 34 (5): 535- 553. |
| 26 | SHENG Y Z , ZHANG Z , XIA L . Fractional-order sliding mode control based guidance law with impact angle constraint[J]. Nonlinear Dynamics, 2021, 106 (1): 425- 444. |
| 27 | 姜鹏, 郭栋, 韩亮, 等. 多飞行器再入段时间协同弹道规划方法[J]. 航空学报, 2020, 41 (S1): 171- 183. |
| JIANG P , GUO D , HAN L , et al. Trajectory optimization for cooperative reentry of multiple hypersonic glide vehicle[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41 (S1): 171- 183. | |
| 28 | LIANG Z X , LV C , ZHU S . Lateral entry guidance with terminal time constraint[J]. IEEE Trans.on Aerospace and Electronic System, 2023, 59 (3): 2544- 2553. |
| 29 | JEON I S , LEE J I , TAHK M J . Homing guidance law for cooperative attack of multiple missiles[J]. Journal of Guidance, Control, and Dynamics, 2010, 33 (1): 275- 280. |
| 30 | CHO D , KIM H J , TAHK M J . Nonsingular sliding mode guidance for impact time control[J]. Journal of Guidance, Control, and Dynamics, 2016, 39 (1): 61- 68. |
| 31 | 徐慧, 蔡光斌, 崔亚龙, 等. 高超声速滑翔飞行器再入轨迹优化[J]. 哈尔滨工业大学学报, 2023, 55 (4): 44- 55. |
| XU H , CAI G B , CUI Y L , et al. Reentry trajectory optimization method of hypersonic glide vehicle[J]. Journal of Harbin Institute of Technology, 2023, 55 (4): 44- 55. |
| [1] | Xuehao LIU, Wenxue LIU, Chaosan YANG, Wenjing ZHU, Yu SONG, Jinhai LI. Optimization method of user quantity prediction based on GPR model [J]. Systems Engineering and Electronics, 2024, 46(8): 2721-2729. |
| [2] | Wenjian YING, Yusen CHENG, Xuan WANG, Shiyan SUN. Testability evaluation method of naval gun guided ammunition based on data fusion in development stage [J]. Systems Engineering and Electronics, 2024, 46(8): 2730-2737. |
| [3] | Wenwen ZHANG, Cheng ZHANG, Chenming ZHENG, Runbei CHENG, Tianle CHEN. Design of improved line-of-sight guidance law based on aircraft visual information [J]. Systems Engineering and Electronics, 2024, 46(8): 2779-2788. |
| [4] | Ningyun LU, Yang LI, Bin JIANG, Shoujin HUANG, Kun MA. Overview of design of testability and dot based fault diagnosis strategy for complex systems [J]. Systems Engineering and Electronics, 2024, 46(7): 2359-2373. |
| [5] | Ping YAN, Chaochang LI. Motion stability analysis of fin-controlled small supercavitating vehicle [J]. Systems Engineering and Electronics, 2024, 46(7): 2456-2464. |
| [6] | Xinyun ZHAO, Jianqiao YU. Multi-source force combined control method for novel agile projectiles [J]. Systems Engineering and Electronics, 2024, 46(5): 1734-1744. |
| [7] | Ruiyu BU, Biao WANG, Hongcheng LI, Chaoying TANG, Rinan ZHU. Design of trajectory tracking model predictive control scheme in terrain following [J]. Systems Engineering and Electronics, 2024, 46(4): 1383-1392. |
| [8] | Qiushi ZHENG, Weichun XU, Minghan ZHAO, Naixing LI, Xuxin BAO. Research on roll control technology of trajectory correction fuse with active-canards [J]. Systems Engineering and Electronics, 2024, 46(4): 1412-1421. |
| [9] | Yang GUI, Bochao ZHENG, Peng GAO. Sliding mode attitude control of quadrotor UAV based on NESO-LFDC [J]. Systems Engineering and Electronics, 2024, 46(3): 1075-1083. |
| [10] | Shuaihao YAN, Rui QIAN, Mingying WEI, Yongbin ZHENG. Improvement of return difference matrix singular value method and stability analysis of MIMO system [J]. Systems Engineering and Electronics, 2024, 46(11): 3874-3882. |
| [11] | Liang ZHANG, Si LIU, Kangwei ZHAO, Cunming HU. Parameters design and stability margin analysis of adaptive augmenting control for launch vehicle [J]. Systems Engineering and Electronics, 2024, 46(1): 271-279. |
| [12] | Duo ZHENG, Yu HAN, Tianyu LU, Zhichen CHU. Multi aircraft cooperative guidance technology considering collision avoidance constraint task allocation [J]. Systems Engineering and Electronics, 2023, 45(9): 2873-2883. |
| [13] | Yushi JIANG, Yang CHEN, Lu GAO, Ligen CAI, Jixing LYU. Predefined-time adaptive control for heavy-lift launch vehicles [J]. Systems Engineering and Electronics, 2023, 45(8): 2570-2577. |
| [14] | Jun YOU, Ke ZHANG, Zhiguo HAN, Tianxing CAI, Cheng ZHANG. Three-dimensional super-twisting slide mode cooperative guidance law with line-of-sight angle constraint [J]. Systems Engineering and Electronics, 2023, 45(7): 2138-2149. |
| [15] | Xu CHEN, Yao XIAO, Lingyu YANG, Jing ZHANG. Stability analysis of radome parasitic loop based on simplified model [J]. Systems Engineering and Electronics, 2023, 45(6): 1784-1796. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||