Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (4): 1383-1392.doi: 10.12305/j.issn.1001-506X.2024.04.27
• Guidance, Navigation and Control • Previous Articles Next Articles
Design of trajectory tracking model predictive control scheme in terrain following
Ruiyu BU, Biao WANG, Hongcheng LI, Chaoying TANG, Rinan ZHU
- College of Automation Engineering, Nanjing University of Aeronautics and Astronautics, Nanjing 211100, China
-
Received:2022-10-18Online:2024-03-25Published:2024-03-25 -
Contact:Biao WANG
CLC Number:
Cite this article
Ruiyu BU, Biao WANG, Hongcheng LI, Chaoying TANG, Rinan ZHU. Design of trajectory tracking model predictive control scheme in terrain following[J]. Systems Engineering and Electronics, 2024, 46(4): 1383-1392.
share this article

Fig.1
Block diagram overall control"


Fig.2
Relationship of control sequence"


Fig.3
Schematic diagram of tracking control and error evaluation in inertial frame"


Fig.4
Schematic diagram of error evaluation in body system"
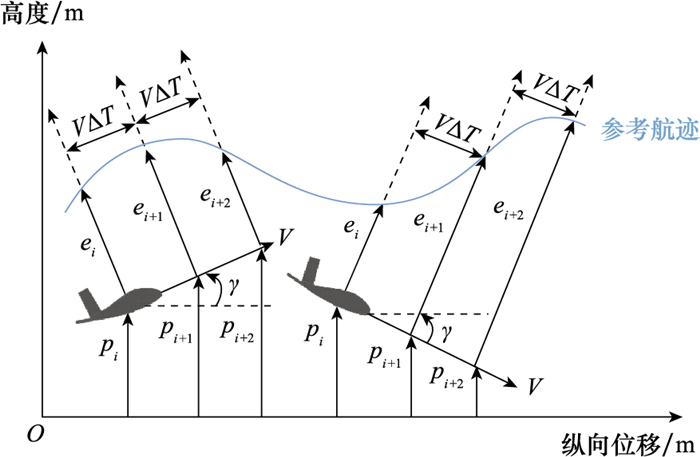

Fig.5
Schematic diagram of influence of time domain parameters on trajectory tracking"


Fig.6
Slope and curvature data"


Fig.7
Adaptive adjustment for predictive horizon"


Fig.8
Flight-path angle tracking effect with different parameter selection"


Fig.9
Speed control effect with different parameter selection"


Fig.10
Results of control incremental changes"


Fig.11
Throttle opening with different parameters selection"


Fig.12
Elevator deflection with different parameters selection"


Fig.13
Terrain following flight effect with different parameters selection"


Fig.14
Tracking error in inertial and body systems"

Table 1
Error statistic data"
| 时域参数 | 坐标系类别 | edm/m | eds/m | eγm/(×10-3 rad) | edmax/m | edmin/m | Sw |
| Np=20 | 惯性系 | 2.6 | 2.4 | 12.7 | 14.0 | 12.4 | 77.7 |
| 机体系 | 2.5 | 2.2 | 12.3 | 13.5 | 11.7 | 73.4 | |
| Np=25 | 惯性系 | 2.1 | 1.7 | 12.5 | 9.0 | 9.6 | 57.9 |
| 机体系 | 2.3 | 1.8 | 12.1 | 9.5 | 10.3 | 62.0 | |
| Np=30 | 惯性系 | 2.4 | 1.7 | 11.0 | 10.5 | 7.6 | 60.2 |
| 机体系 | 2.3 | 1.7 | 11.1 | 10.2 | 8.2 | 59.5 | |
| 自适应方案 | 惯性系 | 1.5 | 1.2 | 9.3 | 6.8 | 6.4 | 41.1 |
| 机体系 | 1.4 | 1.2 | 9.7 | 6.7 | 6.6 | 40.2 |
Table 2
Optimized solution time"
| 时域参数 | Np=20 | Np=25 | Np=30 | 自适应方案 |
| Tmean | 0.79 | 0.84 | 0.94 | 1.60 |
| Tmax | 12.10 | 6.50 | 9.40 | 14.70 |

Fig.15
Optimized solution time with different parameters selection"


Fig.16
Fitting relationship between predictive horizon and flight velocity"


Fig.17
Fitting relationship between control horizon and flight velocity"

| 1 | LIVSHITZ A , IDAN M .Preview control approach for laser range finder based terrain following[J].IEEE Trans.on Aerospace and Electronic Systems,2019,56(2):1318-1331. |
| 2 |
KAZEMIFAR O , BABAEI A R , MORTAZAVI M .Online aircraft velocity and normal acceleration planning for rough terrain following[J].The Aeronautical Journal,2017,121(1244):1561-1577.
doi: 10.1017/aer.2017.27 |
| 3 |
LU P , PIERSON B L .Aircraft terrain following based on a nonlinear continuous predictive control approach[J].Journal of Guidance, Control, and Dynamics,1995,18(4):817-823.
doi: 10.2514/3.21464 |
| 4 |
LIVSHITZ A , IDAN M .Low-cost laser range-measurement-based terrain-following concept and error analysis[J].Journal of Guidance, Control, and Dynamics,2018,41(4):1006-1014.
doi: 10.2514/1.G002565 |
| 5 |
NOORDIN A , MOHD BASRI M A , MOHAMED Z , et al.Adaptive PID controller using sliding mode control approaches for quadrotor UAV attitude and position stabilization[J].Arabian Journal for Science and Engineering,2021,46(2):963-981.
doi: 10.1007/s13369-020-04742-w |
| 6 |
ZHANG S C , XUE X Y , CHEN C , et al.Development of a low-cost quadrotor UAV based on ADRC for agricultural remote sensing[J].International Journal of Agricultural and Biological Engineering,2019,12(4):82-87.
doi: 10.25165/j.ijabe.20191204.4641 |
| 7 | MINH V T , MOEZZI R , DHOSKA K , et al.Model predictive control for autonomous vehicle tracking[J].International Journal of Innovative Technology and Interdisciplinary Sciences,2021,4(1):560-603. |
| 8 | 郑世钰, 艾晓琳, 杨迪.基于积分反步法的四旋翼滑模轨迹跟踪算法[J].系统工程与电子技术,2019,41(3):643-650. |
| ZHENG S Y , AI X L , YANG D .Integral backstepping based sliding mode trajectory tracking algorithm for quadrotor[J].Systems Engineering and Electronics,2019,41(3):643-650. | |
| 9 |
XIAN B , GUO J C , ZHANG Y .Adaptive backstepping tracking control of a 6-DOF unmanned helicopter[J].IEEE/CAA Journal of Automatica Sinica,2015,2(1):19-24.
doi: 10.1109/JAS.2015.7032902 |
| 10 |
ZHENG H , NEGENBORN R R , LODEWIJKS G .Trajectory tracking of autonomous vessels using model predictive control[J].IFAC Proceedings Volumes,2014,47(3):8812-8818.
doi: 10.3182/20140824-6-ZA-1003.00767 |
| 11 | LAPP T, SINGH L. Model predictive control based trajectory optimization for nap-of-the-earth (NOE) flight including obstacle avoidance[C]//Proc. of the IEEE American Control Conference, 2004, 1: 891-896. |
| 12 | 王晓海, 孟秀云, 李传旭.基于MPC的无人机航迹跟踪控制器设计[J].系统工程与电子技术,2021,43(1):191-198. |
| WANG X H , MENG X Y , LI C X .Design of trajectory tracking controller for UAV based on MPC[J].Systems Engineering and Electronics,2021,43(1):191-198. | |
| 13 |
MAYNE D Q , RAWLINGS J B , RAO C V , et al.Constrained model predictive control: stability and optimality[J].Automatica,2000,36(6):789-814.
doi: 10.1016/S0005-1098(99)00214-9 |
| 14 |
SCOKAERT P O M , MAYNE D Q .Min-max feedback model predictive control for constrained linear systems[J].IEEE Trans.on Automatic Control,1998,43(8):1136-1142.
doi: 10.1109/9.704989 |
| 15 |
ZHANG B , ZONG C F , CHEN G Y , et al.An adaptive-prediction-horizon model prediction control for path tracking in a four-wheel independent control electric vehicle[J].Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2019,233(12):3246-3262.
doi: 10.1177/0954407018821527 |
| 16 |
GRIFFITH D W , BIEGLER L T , PATWARDHAN S C .Robustly stable adaptive horizon nonlinear model predictive control[J].Journal of Process Control,2018,70,109-122.
doi: 10.1016/j.jprocont.2018.07.014 |
| 17 |
BØHN E , GROS S , MOE S , et al.Reinforcement learning of the prediction horizon in model predictive control[J].IFAC-PapersOnLine,2021,54(6):314-320.
doi: 10.1016/j.ifacol.2021.08.563 |
| 18 |
BHATTACHARYA R , BALAS G J , KAYA M A , et al.Nonlinear receding horizon control of an F-16 aircraft[J].Journal of Guidance, Control, and Dynamics,2002,25(5):924-931.
doi: 10.2514/2.4965 |
| 19 |
FU NK , JAMES E .Optimal-path precision terrain-following system[J].Journal of Aircraft,1977,14(2):128-134.
doi: 10.2514/3.58755 |
| 20 |
AL-GABALAWY M , HOSNY N S , ABORISHA A S .Model predictive control for a basic adaptive cruise control[J].International Journal of Dynamics and Control,2021,9(3):1132-1143.
doi: 10.1007/s40435-020-00732-w |
| 21 | YANG H J , GUO M C , XIA Y Q , et al.Trajectory tracking for wheeled mobile robots via model predictive control with softening constraints[J].IET Control Theory & Applications,2017,12(2):206-214. |
| 22 |
LIU C X , GAO J , XU D M .Lyapunov-based model predictive control for tracking of nonholonomic mobile robots under input constraints[J].International Journal of Control, Automation and Systems,2017,15(5):2313-2319.
doi: 10.1007/s12555-016-0350-x |
| 23 | 孙峻. 非线性模型预测控制理论及应用研究[D]. 西安: 西北工业大学, 2002. |
| SUN J. Study on the theories and applications of nonlinear model predictive control[D]. Xi'an: Northwestern Polytechnical University, 2002. | |
| 24 |
LEE J H .Model predictive control: review of the three de-cades of development[J].International Journal of Control, Automation and Systems,2011,9(3):415-424.
doi: 10.1007/s12555-011-0300-6 |
| 25 |
CAMPONOGARA E , JIA D , KROGH B H , et al.Distributed model predictive control[J].IEEE Control Systems Magazine,2002,22(1):44-52.
doi: 10.1109/37.980246 |
| 26 | YUAN X F , HUANG G M , SHI K .Improved adaptive path following control system for autonomous vehicle in different velocities[J].IEEE Trans.on Intelligent Transportation Systems,2019,21(8):3247-3256. |
| 27 | JI J , KHAJEPOUR A , MELEK W W , et al.Path planning and tracking for vehicle collision avoidance based on model predictive control with multiconstraints[J].IEEE Trans.on Vehicular Technology,2016,66(2):952-964. |
| 28 |
ZHENG H , NEGENBORN R R , LODEWIJKS G .Trajectory tracking of autonomous vessels using model predictive control[J].IFAC Proceedings Volumes,2014,47(3):8812-8818.
doi: 10.3182/20140824-6-ZA-1003.00767 |
| 29 |
YANG K , KANG Y , SUKKARIEH S .Adaptive nonlinear model predictive path-following control for a fixed-wing unmanned aerial vehicle[J].International Journal of Control, Automation and Systems,2013,11(1):65-74.
doi: 10.1007/s12555-012-0028-y |
| 30 |
TOWNSEND J L , BLATT P E .New MIL-F-9490D requirements and implications on future flight control design[J].Journal of Aircraft,1976,13(9):670-675.
doi: 10.2514/3.58698 |
| [1] | Wenkang HAO, Qifeng CHEN. Distributed model predictive energy-saving control of UAVs formation with fuzzy constraints [J]. Systems Engineering and Electronics, 2024, 46(3): 1021-1030. |
| [2] | Shuxin HU, An ZHANG, Manyi SUN, Minghao LI. Obstacles avoidance for quadrotor formation based on consensus theory and S-MPC [J]. Systems Engineering and Electronics, 2024, 46(2): 658-667. |
| [3] | Liang ZHANG, Si LIU, Kangwei ZHAO, Cunming HU. Parameters design and stability margin analysis of adaptive augmenting control for launch vehicle [J]. Systems Engineering and Electronics, 2024, 46(1): 271-279. |
| [4] | Hong ZHANG, Yunhua WU, Shengjun ZHONG, Haibo GUO. Space target compound pointing control method based on backstepping [J]. Systems Engineering and Electronics, 2023, 45(9): 2884-2893. |
| [5] | Wenfeng XU, Yinghui LI, Binbin PEI, Zhilong YU. Coordinated optimization control of morphing aircraft based on multi-model MPC [J]. Systems Engineering and Electronics, 2023, 45(9): 2902-2911. |
| [6] | Xu CHEN, Yao XIAO, Lingyu YANG, Jing ZHANG. Stability analysis of radome parasitic loop based on simplified model [J]. Systems Engineering and Electronics, 2023, 45(6): 1784-1796. |
| [7] | Chao SONG, Bo LI, Yunhong MA, Jingyi HUANG. 3D UAV trajectory planning based on optimized A* and MPC fusion algorithm [J]. Systems Engineering and Electronics, 2023, 45(12): 3995-4004. |
| [8] | Ziran LIU, Zijian DAI, Chengfei YUE, Peiji WANG, Xibin CAO. Gaussian-mixture-process-based task-space predictive control method for space robot [J]. Systems Engineering and Electronics, 2023, 45(11): 3597-3605. |
| [9] | Tianye SUN, Wei SUN, Jianjun WU. UAV formation rapid assembly method based on improved Quatre algorithm [J]. Systems Engineering and Electronics, 2022, 44(9): 2840-2848. |
| [10] | Biao XU, Xiang LI, Shuang LI, Jinpeng ZHANG. Intelligent guidance method based on nonlinear model predictive control for Mars atmospheric entry [J]. Systems Engineering and Electronics, 2021, 43(7): 1943-1953. |
| [11] | Xiaohai WANG, Xiuyun MENG, Chuanxu LI. Design of trajectory tracking controller for UAV based on MPC [J]. Systems Engineering and Electronics, 2021, 43(1): 191-198. |
| [12] | Shuai LIU, Guorong ZHAO, Bin ZENG, Chao GAO. Moving horizon estimation for uncertain systems with packet dropouts and quantization [J]. Systems Engineering and Electronics, 2020, 42(4): 912-918. |
| [13] | ZHU Mengyuan, LYU Na, CHEN Kefan, ZHONG Yun, LIU Chuang, GAO Weiting. Collaborative aeronautic swarm search of Markov moving targets [J]. Systems Engineering and Electronics, 2019, 41(9): 2041-2047. |
| [14] | SONG Min, DAI Jing, KONG Tao. UAV autonomous collision avoidance control method based on NMPC [J]. Systems Engineering and Electronics, 2019, 41(9): 2092-2099. |
| [15] | WANG Chao, ZHANG Shengxiu, SONG Zibiao, YANG Jianye, WU Xiaolu. Aircraft anti-windup of robust adaptive nonlinear predictive control [J]. Systems Engineering and Electronics, 2018, 40(2): 393-400. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||