Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (9): 3150-3165.doi: 10.12305/j.issn.1001-506X.2024.09.27
• Guidance, Navigation and Control • Previous Articles
Kinematics parallel modelling of systems consisting of adjustable degree-of-freedom modular units
Junting FEI, Qingxuan JIA, Gang CHEN
- School of Intelligent Engineering and Automation, Beijing University of Posts and Telecommunications, Beijing 100876, China
-
Received:2023-09-19Online:2024-08-30Published:2024-09-12 -
Contact:Gang CHEN
CLC Number:
Cite this article
Junting FEI, Qingxuan JIA, Gang CHEN. Kinematics parallel modelling of systems consisting of adjustable degree-of-freedom modular units[J]. Systems Engineering and Electronics, 2024, 46(9): 3150-3165.
share this article

Fig.1
Modular unit with adjustable degrees of freedom"


Fig.2
Main structure of modular unit with adjustable degrees of freedom"


Fig.3
Different motion transmission of modular unit"


Fig.4
Connection orientation relationships between modular unit connectors"
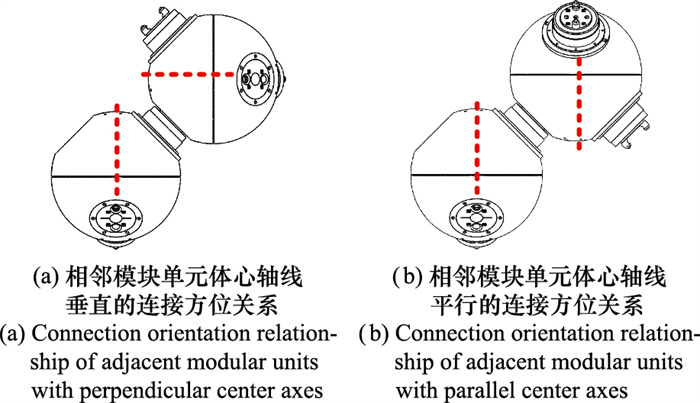

Fig.5
Coordinate system definition of modular unit with adjustable degrees of freedom"


Fig.6
Limiting connection state of modular unit with adjustable degrees of freedom"

Table 1
Motion-transmission library of the modular unit"
| 运动输入端坐标系所固连接口编号 | 运动输出端坐标系所固连接口编号 | 关节轴线 | ||
| S1 | S2 | S3 | ||
| 1 | 2 | - | 1 | - |
| 3 | 2 | 1 | 3 | |
| 4 | 2 | 1 | - | |
| 2 | 1 | - | 1 | - |
| 3 | - | 1 | 2 | |
| 4 | - | 1 | - | |
| 3 | 1 | 2 | 3 | 1 |
| 2 | 2 | - | 1 | |
| 4 | - | - | 1 | |
| 4 | 1 | 1 | 2 | - |
| 2 | 1 | - | - | |
| 3 | - | - | 1 | |

Fig.7
Mathematical description of modular robot topology based on quadruple matrix"


Fig.8
Diagram of single-chain modular robot"


Fig.9
Modular robot containing $ \varsigma$ motion branches (consisting of ζ motion branches without forks)"
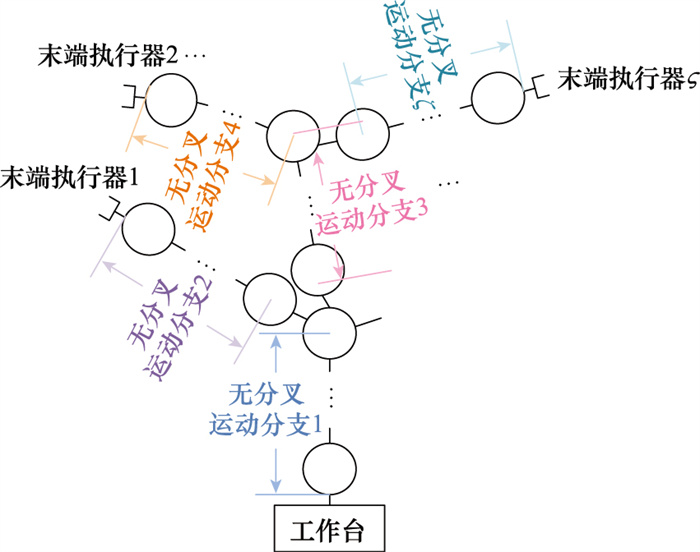

Fig.10
Modular robot containing two motion branches (consisting of three motion branches without forks)"


Fig.11
Kinematic modeling diagram of modular robot with closed chain"


Fig.12
Parallel kinematics modeling process for modular robots"


Fig.13
Coordinate system of modular unit"

Table 2
Connection orientation relationships of modular unit"
| 接口所处模块单元半球类型 | 相邻模块单元体心轴线排布 | 模块单元连接方位关系 | 位姿转换矩阵 |
| 相同 (①主动-主动; ②被动-被动) | 垂直 | ① | |
| 平行 | ② | ||
| 相反 (①主动-被动; ②被动-主动) | 垂直 | ② | |
| 平行 | ① |

Fig.14
Simulation object"


Fig.15
Modular robot end motion curve"
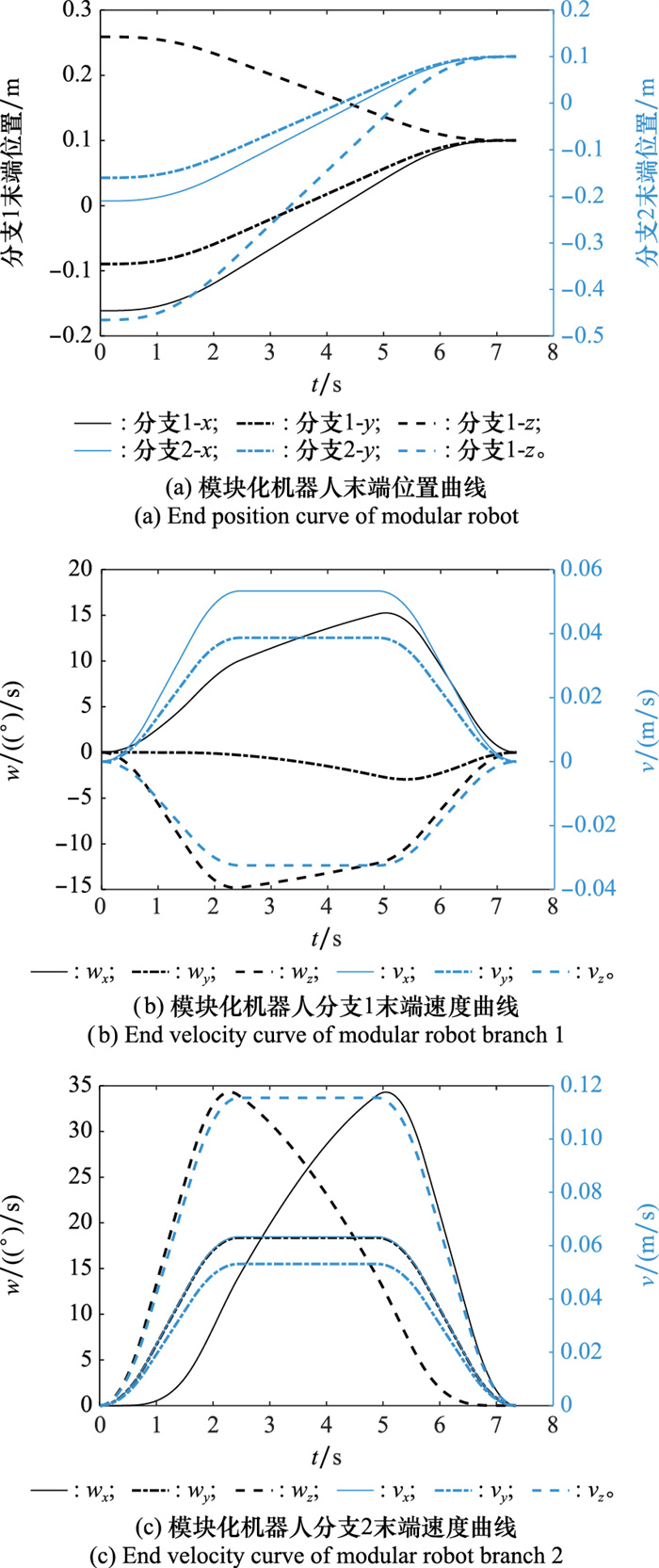
Table 3
Joints involved in motion branch of modular robot"
| 无分岔运动分支编号 | 模块单元编号 | 模块单元关节编号 |
| 1 | 1 | 2 |
| 1 | 1 | |
| 1 | 3 | |
| 2 | 1 | |
| 2 | 3 | |
| 3 | 1 | |
| 3 | 3 | |
| 2 | 4 | 1 |
| 4 | 3 | |
| 5 | 1 | |
| 5 | 3 | |
| 6 | 1 | |
| 6 | 3 | |
| 7 | 1 | |
| 7 | 3 | |
| 8 | 1 | |
| 8 | 3 | |
| 3 | 4 | 2 |
| 9 | 1 | |
| 9 | 3 | |
| 10 | 1 | |
| 10 | 3 | |
| 11 | 1 | |
| 11 | 3 | |
| 12 | 1 | |
| 12 | 3 |

Fig.16
Modular unit motion curve"


Fig.17
Motion trajectory of modular robot end"

| 1 | NEUMANNV J,BURKSA W.Theory of self-reproducing automata[J].IEEE Trans.on Neural Networks,1966,5(1):3-14. |
| 2 | GILPINK,RUSD.Modular robot systems[J].IEEE Robotics & Automation Magazine,2010,17(3):38-55. |
| 3 |
FUKUDAT,NAKAGAWAS.Approach to the dynamically reconfigurable robotic system[J].Journal of Intelligent and Robotic Systems,1988,1(1):55-72.
doi: 10.1007/BF00437320 |
| 4 | ALATTASR J,PATELS,SOBHT M.Evolutionary modular robotics: survey and analysis[J].Journal of Intelligent & Robotic Systems,2019,95(3):815-828. |
| 5 |
SEOJ,PAIKJ,YIMM.Modular reconfigurable robotics[J].Annual Review of Control, Robotics, and Autonomous Systems,2019,2,63-88.
doi: 10.1146/annurev-control-053018-023834 |
| 6 | JIANGZ H,CAOX L,HUANGX,et al.Progress and development trend of space intelligent robot technology[J].Space: Science and Technology,2022,2022,9832053. |
| 7 | LID,ZHONGL,ZHUW,et al.A survey of space robotic technologies for on-orbit assembly[J].Space: Science & Technology,2022,2022,9849170. |
| 8 |
赵航,赵阳,田浩,等.空间细胞机器人系统关键技术及其应用[J].宇航学报,2018,39(10):1071-1080.
doi: 10.3873/j.issn.1000-1328.2018.10.002 |
|
ZHAOH,ZHAOY,TIANH,et al.Key techniques and applications of space cellular robotic system[J].Journal of Astronautics,2018,39(10):1071-1080.
doi: 10.3873/j.issn.1000-1328.2018.10.002 |
|
| 9 |
ZAWIDZKIM,SZKLARSKIJ.Transformations of arm-z modular manipulator with particle swarm optimization[J].Advances in Engineering Software,2018,126,147-160.
doi: 10.1016/j.advengsoft.2018.05.003 |
| 10 | LIU S B, ALTHOFF M. Optimizing performance in automation through modular robots[C]//Proc. of the IEEE International Conference on Robotics and Automation, 2020: 4044-4050. |
| 11 | 黄攀峰,常海涛,鹿振宇,等.面向在轨服务的可重构细胞卫星关键技术与展望[J].宇航学报,2016,37(1):1-10. |
| HUANGP F,CHANGH T,LUZ M,et al.Key techniques of on-orbit service-oriented reconfigurable cellularized satellite and lts prospects[J].Journal of Astronautics,2016,37(1):1-10. | |
| 12 |
CHENL,MAY,ZHANGY,et al.Obstacle avoidance and multitarget tracking of a super redundant modular manipulator based on Bezier curve and particle swarm optimization[J].Chinese Journal of Mechanical Engineering,2020,33(1):1-19.
doi: 10.1186/s10033-019-0427-6 |
| 13 |
HAUSERS,MUTLUM,LEZIARTP A,et al.Roombots extended: challenges in the next generation of self-reconfigurable modular robots and their application in adaptive and assistive furniture[J].Robotics and Autonomous Systems,2020,127,103467.
doi: 10.1016/j.robot.2020.103467 |
| 14 |
SHEELAK G,MENONP J,SWETHAS,et al.Review on bio-inspired modular robotic system[J].Materials Today: Proceedings,2020,24,1918-1923.
doi: 10.1016/j.matpr.2020.03.618 |
| 15 |
DOKUYUCUH I,OZMENN G.Achievements and future directions in self-reconfigurable modular robotic systems[J].Journal of Field Robotics,2023,40(3):701-746.
doi: 10.1002/rob.22139 |
| 16 |
WEIR P,LIUY B,DONGH J,et al.A graph-based hybrid reconfiguration deformation planning for modular robots[J].Sensors,2023,23(18):7892.
doi: 10.3390/s23187892 |
| 17 | DANG H T, LAPIERRE L, ZAPATA R, et al. Dynamic configuration for an autonomous underwater robot[C]//Proc. of the IEEE 28th Mediterranean Conference on Control and Automation, 2020: 520-525. |
| 18 | STOY K, BRANDT D, CHRISTENSEN D J. Self-reconfigurable robots: an introduction[D]. Massachusetts: MIT Press, 2010. |
| 19 |
AKITAYAH A,ARKINE M,DAMIANM,et al.Universal reconfiguration of facet-connected modular robots by pivots: the O(1) musketeers[J].Algorithmica,2021,83(5):1316-1351.
doi: 10.1007/s00453-020-00784-6 |
| 20 | 李宪华,盛蕊,张雷刚,等.六自由度模块化机器人手臂奇异构型分析[J].农业机械学报,2017,48(7):376-382. |
| LIX H,SHENGR,ZHANGL G,et al.Singular configuration analysis of 6-DOF modular manipulator[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(7):376-382. | |
| 21 | WANGF,QIANZ Q,YANZ G,et al.A novel resilient robot: kinematic analysis and experimentation[J].IEEE Access,2019,8,2885-2892. |
| 22 |
YUNA,MOOND,HAJ,et al.Modman: an advanced reconfigurable manipulator system with genderless connector and automatic kinematic modeling algorithm[J].IEEE Robotics and Automation Letters,2020,5(3):4225-4232.
doi: 10.1109/LRA.2020.2994486 |
| 23 | STRAVOPODISN A,MOULIANITISV C.Rectilinear tasks optimization of a modular serial metamorphic manipulator[J].Journal of Mechanisms and Robotics,2021,13(1):1-15. |
| 24 |
FEDERM,GIUSTIA,VIDONIR.An approach for automatic generation of the URDF file of modular robots from modules designed using SolidWorks[J].Procedia Computer Science,2022,200,858-864.
doi: 10.1016/j.procs.2022.01.283 |
| 25 | NAINER C, FEDER M, GIUSTI A. Automatic generation of kinematics and dynamics model descriptions for modular reconfigurable robot manipulators[C]//Proc. of the IEEE 17th International Conference on Automation Science and Engineering, 2021: 45-52. |
| 26 |
ZHANGZ Y,WANGX Q,WANGS T,et al.Design and modeling of a parallel-pipe-crawling pneumatic soft robot[J].IEEE Access,2019,7,134301-134317.
doi: 10.1109/ACCESS.2019.2941502 |
| 27 |
YANGH D,ASBECKA T.Design and characterization of a modular hybrid continuum robotic manipulator[J].IEEE/ASME Trans.on Mechatronics,2020,25(6):2812-2823.
doi: 10.1109/TMECH.2020.2993543 |
| 28 |
AIMEDEEF,GOGUG,DAIJ S,et al.Systematization of morphing in reconfigurable mechanisms[J].Mechanism and Machine Theory,2016,96,215-224.
doi: 10.1016/j.mechmachtheory.2015.07.009 |
| 29 |
王宏旭,柳子然,岳程斐,等.变拓扑多臂航天器高效统一动力学建模[J].宇航学报,2022,43(12):1606-1617.
doi: 10.3873/j.issn.1000-1328.2022.12.003 |
|
WANGH X,LIUZ R,YUEC F,et al.Unified high-efficient dynamic modeling of multi-arm spacecraft with variable topology[J].Journal of Astronautics,2022,43(12):1606-1617.
doi: 10.3873/j.issn.1000-1328.2022.12.003 |
|
| 30 | HUAX,WANGZ,YAOH J,et al.Research on many-to-many target assignment for unmanned aerial vehicle swarm in three-dimensional scenarios[J].Computers & Electrical Engineering,2021,91,107067. |
| 31 | 周杨,畅博彦,金国光,等.面向变胞机构动力学建模的变拓扑构型数学描述方法[J].机械工程学报,2022,58(9):49-61. |
| ZHOUY,CHANGB Y,JING G,et al.Mathematic description method of variable topology configuration for dynamic modeling of metamorphic mechanism[J].Journal of Mechanical Engineering,2022,58(9):49-61. | |
| 32 |
LIUC,WHITZERM,YIMM.A distributed reconfiguration planning algorithm for modular robots[J].IEEE Robotics and Automation Letters,2019,4(4):4231-4238.
doi: 10.1109/LRA.2019.2930432 |
| 33 | ZHANG K T, DAI J S, FANG Y F, et al. String matrix based geometrical and topological representation of mechanisms[C]//Proc. of the 13th World Congress in Mechanism and Machine Science, 2011: 19-25. |
| 34 |
郑浩峻,李铁民,王立平.可重构机器人树状拓扑结构[J].清华大学学报(自然科学版),2002,42(11):1480-1483.
doi: 10.3321/j.issn:1000-0054.2002.11.018 |
|
ZHENGH J,LIT M,WANGL P.Tree-like topological structure of reconfigurable robots[J].Journal of Tsinghua University (Science and Technology),2002,42(11):1480-1483.
doi: 10.3321/j.issn:1000-0054.2002.11.018 |
|
| 35 | SAABW,RACIOPPOP,BEN-TZVIP.A review of coupling mechanism designs for modular reconfigurable robots[J].Robotica,2018,37(2):378-403. |
| 36 |
XUR,LIC Y.A modular agricultural robotic system (MARS) for precision farming: concept and implementation[J].Journal of Field Robotics,2022,39(4):387-409.
doi: 10.1002/rob.22056 |
| 37 |
LIUC,LINQ,KIMH,et al.SMORES-EP, a modular robot with parallel self-assembly[J].Autonomous Robots,2023,47(2):211-228.
doi: 10.1007/s10514-022-10078-1 |
| 38 | AN X K, JIA Q X, CHEN G, et al. S2MBot: a spherical self-reconfigurable modular robot with high torque output capability-design and simulation[C]//Proc. of the IEEE International Conference on Service Robotics, 2023: 49-54. |
| [1] | Yuang ZHU, Yali ZHAO, Jialuan HE, Chenguang ZHANG, Chaojun WU, Xiaoxiao JIA. Topology discovery method for mobile communication systems based on distributed SDN [J]. Systems Engineering and Electronics, 2024, 46(1): 357-365. |
| [2] | Jintao YU, Bing XIAO, Jiajun XIONG. Network damage maximization algorithm based on topology potential [J]. Systems Engineering and Electronics, 2023, 45(9): 2812-2818. |
| [3] | Xingguang XU, Xiaofeng WANG, Lu YAO, Zhang REN. Formation configuration and communication topology optimization for fixed-wing UAVs [J]. Systems Engineering and Electronics, 2022, 44(9): 2936-2946. |
| [4] | Jianxing GONG, Lei ZHU, Huabing WANG, Peiyuan DING, Chengzhao LU. Analysis of key nodes in combat system based on function graph [J]. Systems Engineering and Electronics, 2022, 44(8): 2515-2521. |
| [5] | Yukun YAO, Lidan REN, Zhi REN, Xin FENG, Wenzheng DU. Topology-aware RLNC retransmission scheme based on SDN in MSC [J]. Systems Engineering and Electronics, 2022, 44(4): 1393-1400. |
| [6] | Xiaoyang HAN, Xiangru MENG, Qiaoyan KANG, Dong ZHAI, Pengfei LIU. Reliability and topology aware service function chain backup protection method [J]. Systems Engineering and Electronics, 2021, 43(7): 1961-1970. |
| [7] | Chaowei SHI, Xiangru MENG, Qiaoyan KANG, Yuze SU. Virtual network topology reconfiguration approach based on hybrid traffic prediction [J]. Systems Engineering and Electronics, 2021, 43(5): 1382-1388. |
| [8] | Yong YANG, Xiangru MENG, Qiaoyan KANG, Wenwen ZHAO. Reliable service function chain deployment method based on traffic optimization [J]. Systems Engineering and Electronics, 2021, 43(10): 3017-3025. |
| [9] | Yuan LIU, Ruiqin ZHAO, Xiaohong SHEN, Haiyan WANG. Collision-free topology discovery protocol for underwater acoustic network [J]. Systems Engineering and Electronics, 2020, 42(7): 1597-1604. |
| [10] | Wen YANG, Yue WANG, Jinming SHI, Jian YUAN. Topology reconfiguration of wireless optical ad hoc networks based on multi-hop location estimation [J]. Systems Engineering and Electronics, 2020, 42(2): 452-457. |
| [11] | Ziran DING, Yu LIU, Jianyue QU, Qiaowen JIANG, Tao JIAN. Information weighted consensus filter algorithm based on node communication degree [J]. Systems Engineering and Electronics, 2020, 42(10): 2181-2188. |
| [12] | LIU Yu, LIU Jun, XU Cong’an, WANG Cong, QI Lin, DING Ziran. Distributed consensus state estimation algorithm in asymmetrical networks [J]. Systems Engineering and Electronics, 2018, 40(9): 1917-1925. |
| [13] | SONG Xiaoxue, WEI Lu, LIN Shuisheng. Adaptive synchronization technology of mobile Ad Hoc network [J]. Systems Engineering and Electronics, 2018, 40(9): 2113-2118. |
| [14] | YAO Yukun, XU Dongliang, REN Zhi, LIU Yaorui. Power adaptation based topology maintenance algorithm of MWSN [J]. Systems Engineering and Electronics, 2017, 39(5): 1134-1140. |
| [15] | LUO Kai, ZHANG Ming-zhi, WU Xi. Key nodes analysis model for space information temporal network based on operation loop [J]. Systems Engineering and Electronics, 2016, 38(7): 1572-1576. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||