Systems Engineering and Electronics ›› 2025, Vol. 47 ›› Issue (1): 52-61.doi: 10.12305/j.issn.1001-506X.2025.01.06
• Electronic Technology • Previous Articles Next Articles
Target detection based on multi-source information fusion from the perspective of drones
Zishuo HAN1,2, Xiquan FAN1, Qiang FU2,*, Chuanyan MA1, Dongdong ZHANG2
- 1. Unit 32398 of the PLA, Beijing 100192, China
2. Department of Electronic and Optical Engineering, Shijiazhuang Campus of Army Engineering University, Shijiazhuang 050003, China
-
Received:2023-09-10Online:2025-01-21Published:2025-01-25 -
Contact:Qiang FU
CLC Number:
Cite this article
Zishuo HAN, Xiquan FAN, Qiang FU, Chuanyan MA, Dongdong ZHANG. Target detection based on multi-source information fusion from the perspective of drones[J]. Systems Engineering and Electronics, 2025, 47(1): 52-61.
share this article

Fig.1
Overall framework of algorithm"


Fig.2
Structure of Swin-Transformer network"


Fig.3
Patch merging process"


Fig.4
Structure of Swin-Transformer module"


Fig.5
Structure of adaptive feature fusion module"
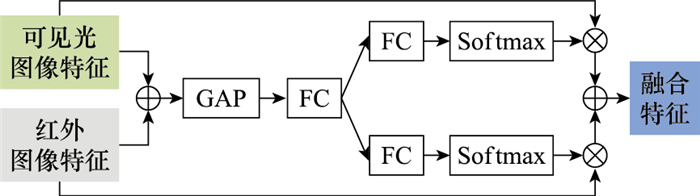

Fig.6
Structure of bidirectional feature pyramid networks"


Fig.7
Multiscale targets detection networks structure"


Fig.8
Principle of targets detection"

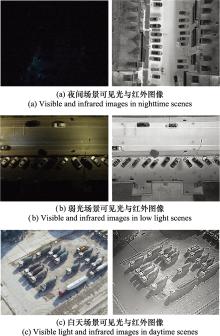
Fig.9
Examples of DroneVehicle datasets"

Table 1
Specific distribution of DroneVehicle datasets"
| 分类 | 图像对数 | 目标数 | ||||
| 小汽车 | 卡车 | 巴士 | 面包车 | 货车 | ||
| 训练集 | 17 990 | 276 220 | 16 025 | 11 410 | 7 950 | 11 231 |
| 验证集 | 1 469 | 20 929 | 1 478 | 799 | 753 | 931 |
| 测试集 | 8 980 | 140 429 | 8 750 | 4 524 | 4 404 | 5 098 |

Fig.10
Bonding box clustering results of k-means"
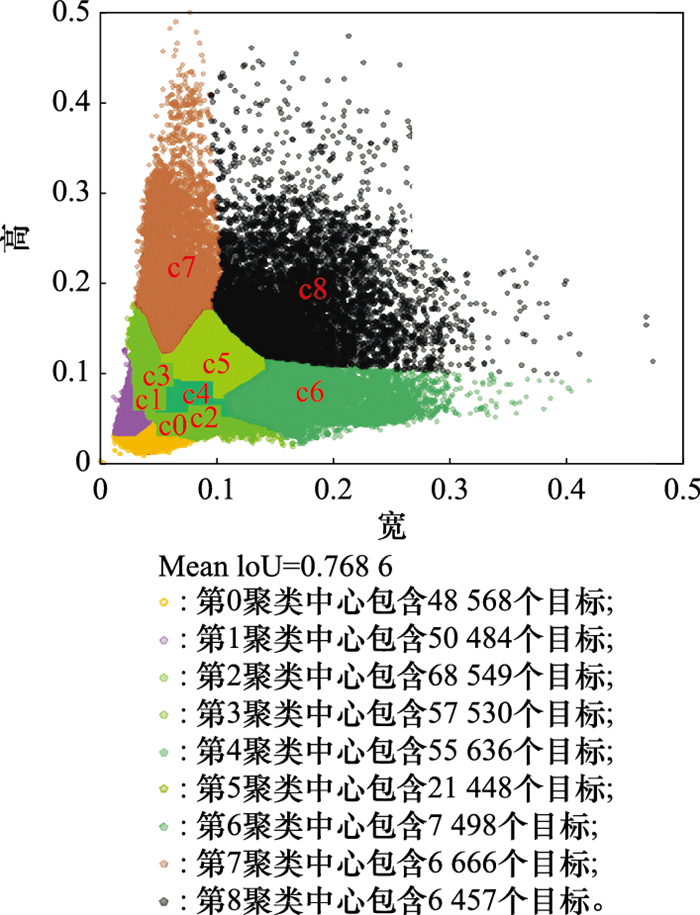
Table 2
Width and height setting of anchor frame in DroneVehicle datasets"
| 对应特征层 | 锚框 | ||
| N2特征层 | (34, 18) | (20, 42) | (47, 26) |
| N3特征层 | (28, 57) | (44, 45) | (56, 67) |
| N4特征层 | (108, 46) | (38, 134) | (110, 118) |
Table 3
Ablation experiment results"
| 网络 | FPS/(frame·s-1) | AP/% | mAP/% | ||||
| 小汽车 | 卡车 | 巴士 | 面包车 | 货车 | |||
| 可见光支路 | 69 | 86.80 | 71.84 | 88.21 | 72.78 | 62.55 | 76.44 |
| 红外支路 | 69 | 96.95 | 76.86 | 92.62 | 75.40 | 69.71 | 82.31 |
| 特征相加融合 | 48 | 97.47 | 81.38 | 95.57 | 84.30 | 72.83 | 86.31 |
| 特征拼接融合 | 47 | 97.60 | 81.65 | 96.22 | 85.47 | 73.29 | 86.85 |
| 特征自适应融合 | 43 | 98.02 | 85.56 | 97.59 | 86.23 | 75.72 | 88.62 |
Table 4
Experimental results of different detection models"
| 算法 | 模式 | FPS/(frame·s-1) | AP/% | mAP/% | ||||
| 小汽车 | 卡车 | 巴士 | 面包车 | 货车 | ||||
| RetinaNet | 可见光 | 48 | 67.50 | 28.24 | 62.05 | 19.26 | 13.72 | 38.16 |
| Faster R-CNN | 可见光 | 28 | 67.88 | 38.59 | 66.98 | 23.20 | 26.31 | 44.59 |
| Mask R-CNN | 可见光 | 23 | 68.52 | 39.84 | 66.75 | 25.35 | 26.83 | 45.46 |
| 所提算法(单支路) | 可见光 | 69 | 86.80 | 71.84 | 88.21 | 72.78 | 62.55 | 76.44 |
| RetinaNet | 红外 | 48 | 79.86 | 32.84 | 67.32 | 16.44 | 28.05 | 44.90 |
| Faster R-CNN | 红外 | 28 | 88.63 | 42.51 | 77.92 | 28.52 | 35.16 | 54.55 |
| Mask R-CNN | 红外 | 22 | 88.77 | 48.86 | 78.38 | 32.16 | 36.63 | 56.96 |
| 所提算法(单支路) | 红外 | 69 | 96.95 | 76.86 | 92.62 | 75.40 | 69.71 | 82.31 |
| 文献[ | 可见光+红外 | 52 | 77.94 | 55.41 | 85.59 | 36.80 | 39.47 | 59.04 |
| 文献[ | 可见光+红外 | 30 | 87.79 | 58.89 | 86.80 | 37.26 | 46.64 | 63.48 |
| UA-CMDet | 可见光+红外 | 36 | 87.51 | 60.70 | 87.08 | 37.95 | 46.80 | 64.01 |
| 所提算法 | 可见光+红外 | 43 | 98.02 | 85.56 | 97.59 | 86.23 | 75.72 | 88.62 |

Fig.11
Results of detection accuracy and speed of different detection models"


Fig.12
Visualization results of target detection"

Table 5
Statistics of experimental results on LLVIP and VEDAI datasets %"
| 算法 | LLVIP | VEDAI | ||||
| AP | AP | mAP | ||||
| 行人 | 汽车 | 飞机 | 船 | |||
| 所提算法 | 92.95 | 76.57 | 89.84 | 84.34 | 83.58 | |

Fig.13
Detection results of LLVIP and VEDAI datasets"

| 1 | 王波, 巫晨云, 杨晓露. 无人机应用难点分析及解决方案[J]. 通信与信息技术, 2024, (1):110-112. |
| WANG B , WU C Y , YANG X L . Analysis of difficulties and solutions for drone applications[J]. Communication and Information Technology, 2024, (1): 110- 112. | |
| 2 |
LUO D H , LIU G , PRASAD D , et al. Infrared and visible ima-ge fusion based on VPDE model and VGG network[J]. Applied Intelligence, 2023, 53 (21): 24739- 24764.
doi: 10.1007/s10489-023-04692-4 |
| 3 |
JEE S , KANG M G . Sensitivity improvement of extremely low light scenes with RGB-NIR multispectral filter array sensor[J]. Sensors, 2019, 19 (5): 1255- 1256.
doi: 10.3390/s19051255 |
| 4 | YANG L Z, MA R H, ZAKHOR A. Drone object detection using RGB/IR fusion[EB/OL]. [2023-08-08]. https://arxiv.org/abs/2201.03786. |
| 5 | BAO C , CAO J , HAO Q , et al. Dual-YOLO architecture from infrared and visible images for object detection[J]. Sensors, 2023, 23 (6): 2306- 2934. |
| 6 | 宁大海, 郑晟. 可见光和红外图像决策级融合目标检测算法[J]. 红外技术, 2023, 45 (3): 282- 291. |
| NING D H , ZHENG S . An object detection algorithm based on decision-level fusion of visible and infrared images[J]. Infrared Technology, 2023, 45 (3): 282- 291. | |
| 7 |
TANG C , LING Y S , YANG H , et al. Decision-level fusion detection for infrared and visible spectra based on deep learning[J]. Infrared and Laser Engineering, 2019, 48 (6): 626001.
doi: 10.3788/IRLA201948.0626001 |
| 8 | JOSEPH R, ALI F. YOLOv3: an incremental improvement[EB/OL]. [2023-08-06]. https://arxiv.org/pdf/1804.02767. |
| 9 | LIU Z, LIN Y T, CAO Y, et al. Swin transformer: hierarchical vision transformer using shifted windows[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2021: 9992-10002. |
| 10 | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[EB/OL]. [2023-08-08]. https://arXivpreprintarXiv:1409.1556. |
| 11 | HE K M, ZHANG X Y, REN S Q, et al. Deep residual learning for image recognition[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2016: 770-778. |
| 12 |
HU J , SHEN L , ALBANIE S , et al. Squeeze-and-excitation networks[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2020, 42 (8): 2011- 2023.
doi: 10.1109/TPAMI.2019.2913372 |
| 13 | NICOLAS C, FRANCISCO M, GABRIEL S, et al. End-to-end object detection with Transformers[EB/OL]. [2023-08-08]. https://arXivpreprintarXiv:2005.12872. |
| 14 | LEE J, LEE Y, KIM J, et al. Set Transformer: a framework for attention-based permutation-invariant neural networks[C]// Proc. of the 36th International Conference on Machine Learning, 2021. |
| 15 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]// Proc. of the 31st International Conference on Neural Information Processing Systems, 2017: 6000-6010. |
| 16 | DING X H, ZHANG X Y, MA N N, et al. RepVGG: making VGG-style ConvNets great again[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021: 13728-13737. |
| 17 | WANG Q , ZHOU L K , YAO Y C , et al. An interconnected feature pyramid networks for object detection[J]. Journal of Visual Communication and Image Representation, 2021, 79 (3): 103260. |
| 18 | HUANG G, LIU Z, LAURENS V D, et al. Densely connected convolutional networks[C]//Proc. of the Conference on Computer Vision and Pattern Recognition, 2017: 2261-2269. |
| 19 | LIN T, DOLLAR P, GIRSHICK R, et al. Feature pyramid networks for object detection[C]//Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 936-994. |
| 20 | LIU S, QI L, QIN H F, et al. Path aggregation network for instance segmentation[C]//Proc. of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2018: 8759-8768. |
| 21 |
SUN Y M , CAO B , ZHU P F , et al. Drone-based RGB-Infrared cross-modality vehicle detection via uncertainty-aware learning[J]. IEEE Trans. on Circuits and Systems for Video Technology, 2022, 32 (10): 6700- 6713.
doi: 10.1109/TCSVT.2022.3168279 |
| 22 | 张冬冬, 王春平, 付强. 基于特征增强网络的SAR图像舰船目标检测[J]. 系统工程与电子技术, 2023, 45 (4): 1032- 1039. |
| ZHANG D D , WANG C P , FU Q . Ship target detection in SAR image based on feature-enhanced network[J]. Systems Engineering and Electronics, 2023, 45 (4): 1032- 1039. | |
| 23 |
YANG T L , LI J H . Remote sensing image object detection based on improved YOLOv3 in deep learning environment[J]. Journal of Circuits, Systems and Computers, 2023, 32 (15): 2350265.
doi: 10.1142/S0218126623502651 |
| 24 | LIN T Y , GOYAL P , GIRSHICK R , et al. Focal loss for dense object detection[J]. IEEE Trans. on Pattern Analysis & Machine Intelligence, 2020, 42 (2): 318- 327. |
| 25 |
REN S Q , HE K M , GIRSHICK R , et al. Faster R-CNN: towards real-time object detection with region proposal networks[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2017, 39 (6): 1137- 1149.
doi: 10.1109/TPAMI.2016.2577031 |
| 26 | HE K M , GKIOXARI G , DOLLAR P , et al. Mask R-CNN[J]. IEEE Trans. on Pattern Analysis and Machine Intelligence, 2017, 42 (2): 386- 397. |
| 27 | 白玉, 侯志强, 刘晓义, 等. 基于可见光图像与红外图像决策级融合的目标检测算法[J]. 空军工程大学学报, 2020, 21 (6): 53- 59. |
| BAI Y , HOU Z Q , LIU X Y , et al. Target detection algorithm based on decision level fusion of visible image and infrared image[J]. Journal of Air Force Engineering University, 2020, 21 (6): 53- 59. | |
| 28 |
XIAO X W , WANG B , MIAO L J , et al. Infrared and visible image object detection via focused feature enhancement and cascaded semantic extension[J]. Remote Sensing, 2021, 13 (13): 2538.
doi: 10.3390/rs13132538 |
| 29 | JIA X Y, ZHU C, LI M Z, et al. LLVIP: a visible-infrared paired dataset for low-light vision[C]//Proc. of the IEEE/CVF International Conference on Computer Vision, 2021: 3489-3497. |
| 30 |
RAZAKARIVONY S , JURIE F . Vehicle detection in aerial imagery: a small target detection benchmark[J]. Journal of Visual Communication and Image Representation, 2016, 34, 187- 203.
doi: 10.1016/j.jvcir.2015.11.002 |
| [1] | Jie JIANG, Limin ZHANG, Kai LIU, Wenjun YAN, Meng WANG. Infrared ship target detection method based on task alignment learning [J]. Systems Engineering and Electronics, 2025, 47(1): 34-40. |
| [2] | Lei YU, Qiuyue DENG, Liying ZHENG, Haoyu WU. Second-order progressive feature fusion network for image super-resolution reconstruction [J]. Systems Engineering and Electronics, 2024, 46(2): 391-400. |
| [3] | Fengtao XUE, Tianyu SUN, Yimin YANG, Jian YANG. Rotated ship target detection algorithm in SAR images based on global feature fusion [J]. Systems Engineering and Electronics, 2024, 46(12): 4044-4053. |
| [4] | Jiayi LUO, Xuanpeng LI, Jianghao LI, Qifan XUE, Feng YANG, Weigong ZHANG. Radiation signal sorting method based on PDW multi-feature fusion [J]. Systems Engineering and Electronics, 2024, 46(1): 80-87. |
| [5] | Meng WANG, Bing ZHU. Application of uncertainty modeling in 2D and 3D object detection [J]. Systems Engineering and Electronics, 2023, 45(8): 2370-2376. |
| [6] | Haijun LI, Fancheng KONG, Yun LIN. Infrared ship detection algorithm based on improved YOLOv5s [J]. Systems Engineering and Electronics, 2023, 45(8): 2415-2422. |
| [7] | Daozhi WEI, Zhaoyu ZHANG, Jiahao XIE, Ning LI. Multi-sensor cross cueing technique based on improved Actor-Critic algorithm [J]. Systems Engineering and Electronics, 2023, 45(6): 1624-1632. |
| [8] | Yao LIU, Yangsheng XIA, Jianmai SHI, Chao CHEN, Jincai HUANG. Path planning method for multi-area coverage by cooperated ground vehicle multi-drone [J]. Systems Engineering and Electronics, 2023, 45(5): 1380-1390. |
| [9] | Zhengyuan LIU, Qinghua WANG. Review and prospect under the mapping mode of coordinated delivery of drones and vehicles [J]. Systems Engineering and Electronics, 2023, 45(3): 785-796. |
| [10] | Renfei CHEN, Yong PENG, Zhongwen LI. A novel detector for floating objects based on continual unsupervised domain adaptation strategy [J]. Systems Engineering and Electronics, 2023, 45(11): 3391-3401. |
| [11] | Jia LIU, Qunyu XU, Weishi CHEN. Motion feature extraction and ensembled classification method based on radar tracks for drones [J]. Systems Engineering and Electronics, 2023, 45(10): 3122-3131. |
| [12] | Wenqing SHI, Haifeng WANG, Haixin CHEN. Fighter-drone teaming system requirements elicitation and verification [J]. Systems Engineering and Electronics, 2023, 45(1): 108-118. |
| [13] | Shuang SONG, Yue ZHANG, Linna ZHANG, Yigang CEN, Yidong LI. Lightweight target detection algorithm based on deep learning [J]. Systems Engineering and Electronics, 2022, 44(9): 2716-2725. |
| [14] | Xiaofeng ZHAO, Fei WU, Yebin XU, Jiahui NIU, Wei CAI, Zhili ZHANG. Evaluation method of infrared camouflage effect based on background restoration [J]. Systems Engineering and Electronics, 2022, 44(8): 2554-2561. |
| [15] | Lin HUANG, Li GONG, Wei JIANG, Kangbo WANG. Remaining useful life prediction based on multi-source information fusion and HMM [J]. Systems Engineering and Electronics, 2022, 44(5): 1747-1756. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||