Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (9): 3185-3197.doi: 10.12305/j.issn.1001-506X.2024.09.30
• Guidance, Navigation and Control • Previous Articles
Trajectory tracking control with predefined dynamic performance for underactuated autonomous underwater vehicle
Xiaobin LI, Dong XU, Xue YANG
- Unit 92942 of the PLA, Beijing 100071, China
-
Received:2023-08-23Online:2024-08-30Published:2024-09-12 -
Contact:Xiaobin LI
CLC Number:
Cite this article
Xiaobin LI, Dong XU, Xue YANG. Trajectory tracking control with predefined dynamic performance for underactuated autonomous underwater vehicle[J]. Systems Engineering and Electronics, 2024, 46(9): 3185-3197.
share this article
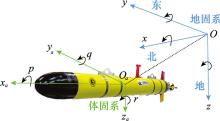
Fig.1
Schematic diagram of body-fixed coordinate system and ground fixed coordinate system"
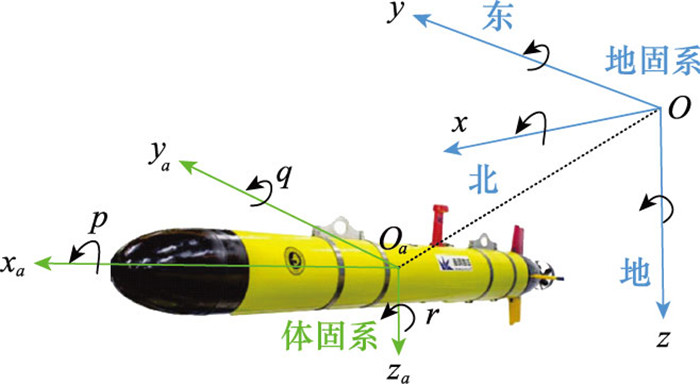
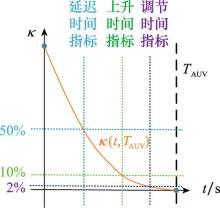
Fig.2
Schematic diagram of dynamic process function"
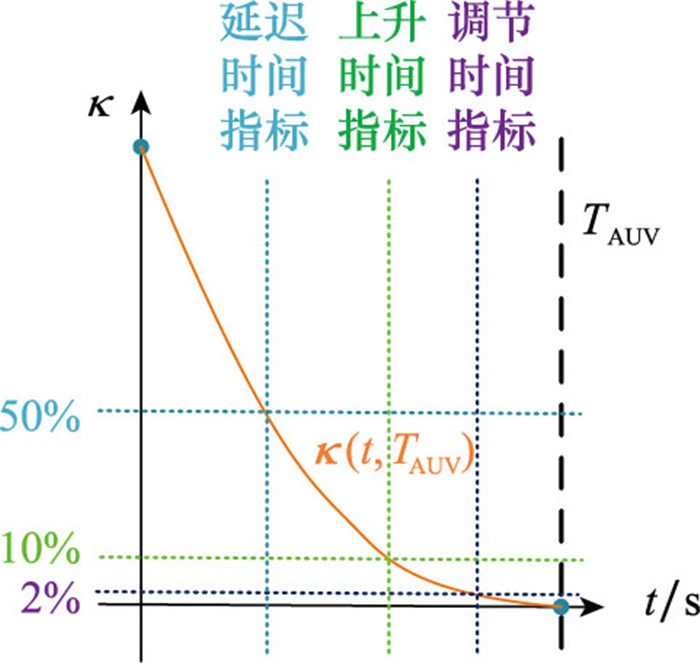
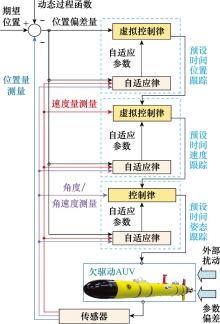
Fig.3
Structure diagram of control system"

Fig.4
Curves of three-dimensional trajectory"
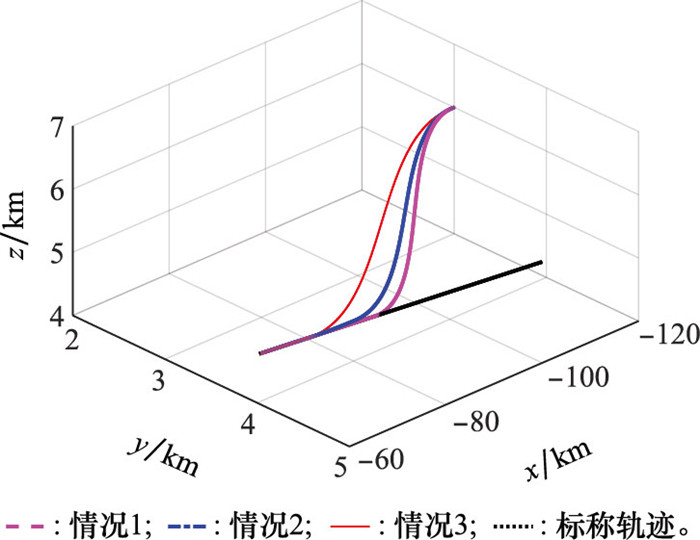
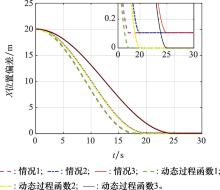
Fig.5
Error graph of the whole position X"

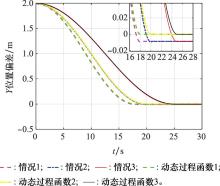
Fig.6
Error graph of the whole position Y"

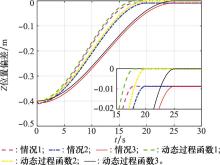
Fig.7
Error graph of the whole position Z"

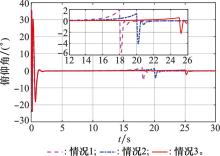
Fig.8
Vanation graph of the whole pitch angle"

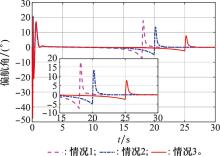
Fig.9
Vanation graph of the whole yaw angle"

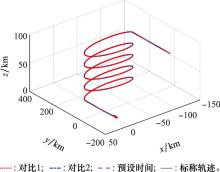
Fig.10
Comparison graph of three-dimensional trajectory"

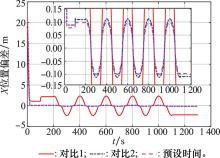
Fig.11
Comparison graph of the whole X position error"

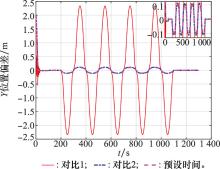
Fig.12
Comparison graph of the whole Y position error"
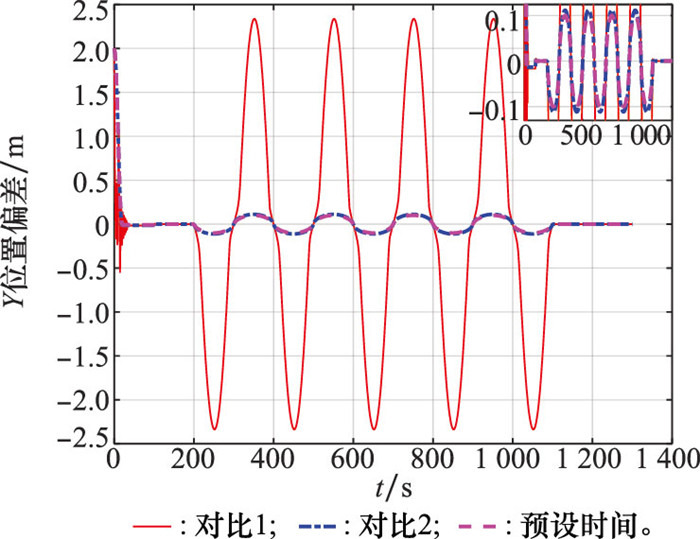
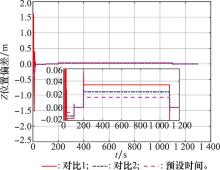
Fig.13
Comparison graph of the whole Z position error"

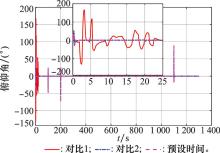
Fig.14
Comparison graph of the variation of the pitch angle"

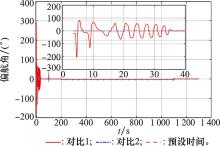
Fig.15
Comparison graph of the variation of the yaw angle"
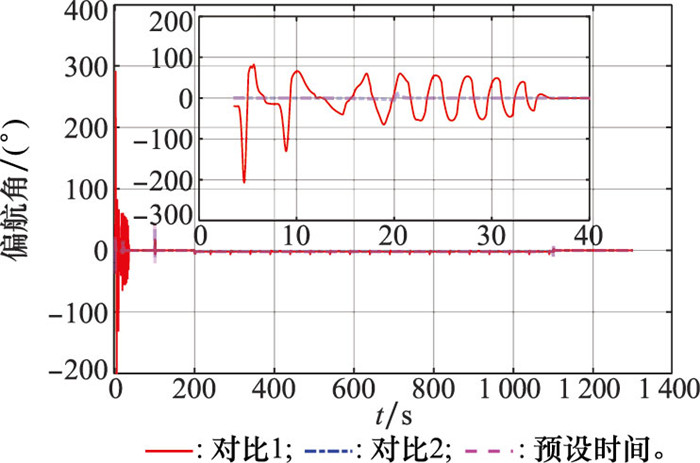
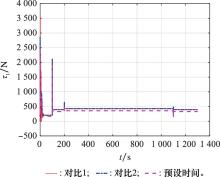
Fig.16
Comparison graph of the variation of the control efforts in X channel"

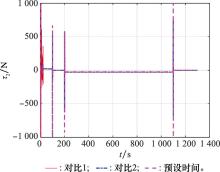
Fig.17
Comparison graph of the variation of the control efforts in Y channel"

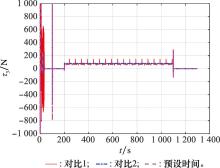
Fig.18
Comparison graph of the variation of the control efforts in Z channel"
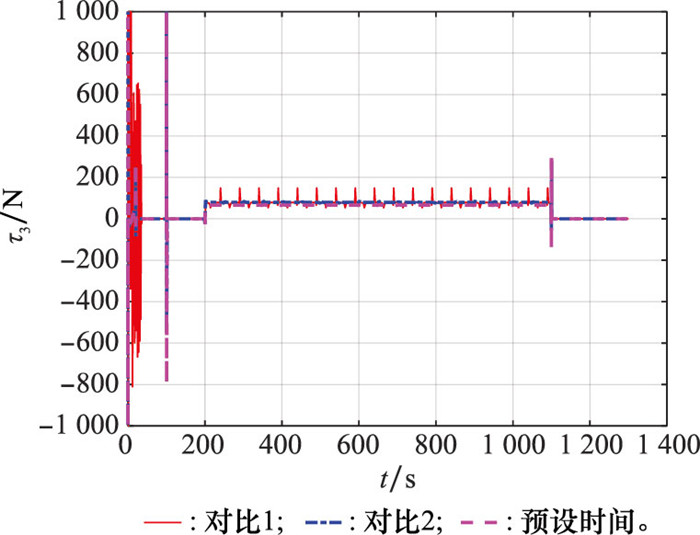
Table 1
Average control efforts and position errors"
| 算法 | 平均控制量/N | 平均位置误差/m |
| 本文方法 | 7.384 4e4 | 3.203 5e2 |
| 对比方法1 | 9.353 6e4 | 4.933 21e2 |
| 对比方法2 | 8.850 35e4 | 3.208 1e2 |
| 1 |
LI Z F , WANG M , MA G . Adaptive optimal trajectory tracking control of AUVs based on reinforcement learning[J]. ISA Transactions, 2023, 137, 122- 132.
doi: 10.1016/j.isatra.2022.12.003 |
| 2 | SHEN C , SHI Y , BUCKHAM B . Path-following control of an AUV: a multiobjective model predictive control approach[J]. IEEE Trans.on Control Systems Technology, 2018, 27 (3): 1334- 1342. |
| 3 |
ZHANG G C , HUANG H , QIN H D , et al. A novel adaptive second order sliding mode path following control for a portable AUV[J]. Ocean Engineering, 2018, 151, 82- 92.
doi: 10.1016/j.oceaneng.2017.12.054 |
| 4 |
REZAZADEGAN F , SHOJAEI K , SHEIKHOLESLAM F , et al. A novel approach to 6-DOF adaptive trajectory tracking control of an AUV in the presence of parameter uncertainties[J]. Ocean Engineering, 2015, 107, 246- 258.
doi: 10.1016/j.oceaneng.2015.07.040 |
| 5 |
ALI N , TAWIAH I , ZHANG W . Finite-time extended state observer based nonsingular fast terminal sliding mode control of autonomous underwater vehicles[J]. Ocean Engineering, 2020, 218, 108179.
doi: 10.1016/j.oceaneng.2020.108179 |
| 6 |
ZHANG Z Y , LIN M W , LI D J . A double-loop control framework for AUV trajectory tracking under model parameters uncertainties and time-varying currents[J]. Ocean Engineering, 2022, 265, 112566.
doi: 10.1016/j.oceaneng.2022.112566 |
| 7 | WU H M, KARKOUB M. Hierarchical backstepping control for trajectory-tracking of autonomous underwater vehicles subject to uncertainties[C]//Proc. of the IEEE 14th International Conference on Control, Automation and Systems, 2014: 1191-1196. |
| 8 |
周铸, 李文魁, 吕志彪, 等. 扰动不确定的AUV改进反步控制[J]. 舰船电子工程, 2022, 42 (12): 169- 174.
doi: 10.3969/j.issn.1672-9730.2022.12.037 |
|
ZHOU Z , LI W K , LYU Z B , et al. Improved backstepping control of uncertain AUVs under perturbations[J]. Ship Electronic Engineering, 2022, 42 (12): 169- 174.
doi: 10.3969/j.issn.1672-9730.2022.12.037 |
|
| 9 | 李娟, 王佳奇, 丁福光. 基于反馈线性化的AUV三维轨迹跟踪滑模控制[J]. 哈尔滨工程大学学报, 2022, 43 (3): 348- 355. |
| LI J , WANG J Q , DING F G . 3-D trajectory tracking sliding mode control of AUV based on feeedback linearization[J]. Journal of Harbin Engineering University, 2022, 43 (3): 348- 355. | |
| 10 | 李鑫滨, 王鹏, 骆曦, 等. 输入受限下欠驱动AUV轨迹跟踪滑模控制[J]. 水下无人系统学报, 2022, 30 (1): 44- 53. |
| LI X B , WANG P , LUO X , et al. Trajectory tracking sliding mode control of underactuated AUV with input constraints[J]. Journal of Underwater Unmanned Systems, 2022, 30 (1): 44- 53. | |
| 11 | LI J , DU J L , CHEN C L P . Command-filtered robust adaptive NN control with the prescribed performance for the 3-D trajectory tracking of underactuated AUVs[J]. IEEE Trans.on Neural Networks and Learning Systems, 2021, 33 (11): 6545- 6557. |
| 12 |
ZHANG J L , XIANG X B , ZHANG Q , et al. Neural network-based adaptive trajectory tracking control of underactuated AUVs with unknown asymmetrical actuator saturation and unknown dynamics[J]. Ocean Engineering, 2020, 218, 108193.
doi: 10.1016/j.oceaneng.2020.108193 |
| 13 |
刘用, 杨晓飞, 夏金铭. 基于模糊算法的AUV避障与姿态控制[J]. 江苏大学学报(自然科学版), 2021, 42 (6): 655- 660.
doi: 10.3969/j.issn.1671-7775.2021.06.006 |
|
LIU Y , YANG X F , XIA J M . Obstacle-avoidance and attitude control of AUV based on fuzzy algorithm[J]. Journal of Jiangsu University (Natural Science Edition), 2021, 42 (6): 655- 660.
doi: 10.3969/j.issn.1671-7775.2021.06.006 |
|
| 14 |
LIANG X , QU X R , WANG N , et al. Three-dimensional trajectory tracking of an underactuated AUV based on fuzzy dynamic surface control[J]. IET Intelligent Transport Systems, 2020, 14 (5): 364- 370.
doi: 10.1049/iet-its.2019.0347 |
| 15 |
CHEN H X , TANG G Y , WANG S F , et al. Adaptive fixed-time backstepping control for three-dimensional trajectory tracking of underactuated autonomous underwater vehicles[J]. Ocean Engineering, 2023, 275, 114109.
doi: 10.1016/j.oceaneng.2023.114109 |
| 16 |
ZHENG J Q , SONG L , LIU L Y , et al. Fixed-time extended state observer-based trajectory tracking control for autonomous underwater vehicles[J]. Asian Journal of Control, 2022, 24 (2): 686- 701.
doi: 10.1002/asjc.2624 |
| 17 |
SUN H B , ZONG G D , CUI J W , et al. Fixed-time sliding mode output feedback tracking control for autonomous underwater vehicle with prescribed performance constraint[J]. Ocean Engineering, 2022, 247, 110673.
doi: 10.1016/j.oceaneng.2022.110673 |
| 18 |
MOULAY E , LECHAPPE V , BERNUAU E , et al. Fixed-time sliding mode control with mismatched disturbances[J]. Automatica, 2022, 136, 110009.
doi: 10.1016/j.automatica.2021.110009 |
| 19 |
ZHENG J Q , SONG L , LIU L Y , et al. Fixed-time sliding mode tracking control for autonomous underwater vehicles[J]. Applied Ocean Research, 2021, 117, 102928.
doi: 10.1016/j.apor.2021.102928 |
| 20 | WANG H B, SU B, WANG Y L, et al. Fixed-time stabilization control for underactuated AUV with external disturbance[C]// Proc. of the IEEE Chinese Control Conference, 2019: 4513-4518. |
| 21 |
AN S , WANG X Y , WANG L J , et al. Observer based fixed-time integral sliding mode tracking control for underactuated AUVs via an event-triggered mechanism[J]. Ocean Engineering, 2023, 284, 115158.
doi: 10.1016/j.oceaneng.2023.115158 |
| 22 |
LIU Y , LIU X P , JING Y W . Adaptive neural networks finite-time tracking control for non-strict feedback systems via prescribed performance[J]. Information Sciences, 2018, 468, 29- 46.
doi: 10.1016/j.ins.2018.08.029 |
| 23 |
SUN Y C , ZHANG Y , QIN H D , et al. Predefined-time prescribed performance control for AUV with improved performance function and error transformation[J]. Ocean Engineering, 2023, 281, 114817.
doi: 10.1016/j.oceaneng.2023.114817 |
| 24 |
LI Y , HE J Y , ZHANG Q , et al. Predefined-time fault-tolerant trajectory tracking control for autonomous underwater vehicles considering actuator saturation[J]. Actuators, 2023, 12 (4): 171- 192.
doi: 10.3390/act12040171 |
| 25 |
LI K W , LI Y M . Adaptive predefined-time optimal tracking control for underactuated autonomous underwater vehicles[J]. IEEE/CAA Journal of Automatica Sinica, 2023, 10 (4): 1083- 1085.
doi: 10.1109/JAS.2023.123153 |
| 26 |
ZHANG L , JU X Z , CUI N G . Ascent control of heavy-lift launch vehicle with guaranteed predefined performance[J]. Aerospace Science and Technology, 2021, 110, 106511.
doi: 10.1016/j.ast.2021.106511 |
| 27 | ZHOU H P, ZHENG Z W, GUAN Z Y, et al. Control barrier function based nonlinear controller for automatic carrier landing[C]// Proc. of the IEEE 16th International Conference on Control, Automation, Robotics and Vision, 2020: 584-589. |
| 28 |
JU X Z , JIANG Y S , JING L , et al. Quantized predefined-time control for heavy-lift launch vehicles under actuator faults and rate gyro malfunctions[J]. ISA transactions, 2023, 138, 133- 150.
doi: 10.1016/j.isatra.2023.02.022 |
| 29 |
JU X Z , WEI C Z , XU H C , et al. Fractional-order sliding mode control with a predefined-time observer for VTVL reusable launch vehicles under actuator faults and saturation constraints[J]. ISA transactions, 2022, 129, 55- 72.
doi: 10.1016/j.isatra.2022.02.003 |
| 30 |
ZHANG L , LI D Y , JING L , et al. Appointed-time cooperative guidance law with line-of-sight angle constraint and time-to-go control[J]. IEEE Trans.on Aerospace and Electronic Systems, 2023, 59 (3): 3142- 3155.
doi: 10.1109/TAES.2022.3221059 |
| 31 |
CHEN Z R , JU X Z , WANG Z W , et al. The prescribed time sliding mode control for attitude tracking of spacecraft[J]. Asian Journal of Control, 2022, 24 (4): 1650- 1662.
doi: 10.1002/asjc.2569 |
| 32 | HARDY G H , LITTLEWOOD J E , PÓLYA G . Inequalities[M]. Cambridge: Cambridge university press, 1952. |
| 33 |
YANG M , ZHANG Q , XU K , et al. Adaptive differentiator-based predefined-time control for nonlinear systems subject to pure-feedback form and unknown disturbance[J]. Complexity, 2021, 2021, 7029058.
doi: 10.1155/2021/7029058 |
| 34 | NI J K , SHI P . Global predefined time and accuracy adaptive neural network control for uncertain strict-feedback systems with output constraint and dead zone[J]. IEEE Trans.on Systems, Man, and Cybernetics-Systems, 2020, 51 (12): 7903- 7918. |
| 35 |
LIU B J , WANG W C , LI Y K , et al. Adaptive quantized predefined-time backstepping control for nonlinear strict-feedback systems[J]. IEEE Trans.on Circuits and Systems Ⅱ: Express Briefs, 2022, 69 (9): 3859- 3863.
doi: 10.1109/TCSII.2022.3175739 |
| 36 |
PETTERSEN K Y , EGELAND O . Time-varying exponential stabilization of the position and attitude of an underactuated autonomous underwater vehicle[J]. IEEE Trans.on Automatic Control, 1999, 44 (1): 112- 115.
doi: 10.1109/9.739086 |
| [1] | Bing QI, Jianhua CHENG, Yanchi ZHAO, Zili WANG. Precise temperature drift error estimation method for capacitive MEMS accelerometers based on micro-deformation analysis [J]. Systems Engineering and Electronics, 2024, 46(7): 2437-2445. |
| [2] | Guangqiang LI, Wenchao DONG, Daqing ZHU, Yue YU, Hao CHEN, Shuanghe YU. 3D path planning for AUV based on improved whaleoptimization algorithm [J]. Systems Engineering and Electronics, 2023, 45(7): 2170-2182. |
| [3] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [4] | Yongqi GAO, Weiqiang MA, Linsen ZHANG, Peng WANG, Miao ZHAO. Distributed multi-AUVs cooperative search method [J]. Systems Engineering and Electronics, 2022, 44(5): 1670-1676. |
| [5] | Shiwei FAN, Ya ZHANG, Qiang HAO, Pan JIANG, Fei YU. Cooperative positioning and error estimation algorithm based on factor graph [J]. Systems Engineering and Electronics, 2021, 43(2): 499-507. |
| [6] | Yanan LI, Haibin HUANG, Liangming CHEN, Yufei ZHUANG, Xiaoli WANG. Energy-optimal three-dimensional path planning for AUV under changing ocean current environment [J]. Systems Engineering and Electronics, 2021, 43(12): 3667-3674. |
| [7] | LI Juan, ZHANG Bingjian, YANG Lijuan, WANG Mengdi. Multi-AUV target search algorithm with cognitive based adaptive optimization in unknown environment#br# [J]. Systems Engineering and Electronics, 2018, 40(8): 1839-1845. |
| [8] | YAN Wei-sheng, QI Bei-bei, GAO Jian, LI Yong. Homing guidance algorithm for an autonomous underwater vehicle based on dipolar field [J]. Systems Engineering and Electronics, 2016, 38(4): 902-908. |
| [9] | WANG Lei, CHENG Xiang-hong, RAN Chang-yan, CHEN Hong-mei, HU Jie. Improved multiple model algorithm based on Bayesian network for AUV integrated navigation [J]. Systems Engineering and Electronics, 2015, 37(4): 901-906. |
| [10] | LIU Ming-yong, DONG Ting-ting, ZHANG Li-chuan. Underwater SLAM navigation algorithm based on random beacons [J]. Systems Engineering and Electronics, 2015, 37(12): 2830-2834. |
| [11] | YAN Wei-sheng, ZUO Lei, CUI Rong-xin. Model based adaptive coverage control for multiple autonomous underwater vehicles [J]. Systems Engineering and Electronics, 2015, 37(11): 2574-2578. |
| [12] | YANG Yong-peng, ZHAO Yu-xin, HAO Yan-ling, DU Hang-yuan. Decoupling control system for AUV hovering nearsurface [J]. Journal of Systems Engineering and Electronics, 2012, 34(3): 572-577. |
| [13] | LIU Yu. Autonomous underwater vehicle control based on adaptive backstepping method [J]. Journal of Systems Engineering and Electronics, 2011, 33(3): 638-642. |
| [14] | HUANG Yu, HAO Yan-ling. Novel measurement method of AUV ground speed based on underwater geomagnetic anomaly localization [J]. Journal of Systems Engineering and Electronics, 2011, 33(10): 2306-2310. |
| [15] | CHANG Fei, WU Xiao-yue. Modeling and algorithm of data transmission system of ground station based on radial basis function neural network [J]. Journal of Systems Engineering and Electronics, 2010, 32(9): 1946-1950. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||