Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (4): 1401-1411.doi: 10.12305/j.issn.1001-506X.2024.04.29
• Guidance, Navigation and Control • Previous Articles Next Articles
Grey theory track association algorithm based on dynamic estimation feedback
Jianjie QIU, Yichao CAI, Hao LI, Quanyin HUANG
- Air Force Early Warning Academy, Wuhan 430014, China
-
Received:2023-05-25Online:2024-03-25Published:2024-03-25 -
Contact:Yichao CAI
CLC Number:
Cite this article
Jianjie QIU, Yichao CAI, Hao LI, Quanyin HUANG. Grey theory track association algorithm based on dynamic estimation feedback[J]. Systems Engineering and Electronics, 2024, 46(4): 1401-1411.
share this article

Fig.1
Algorithm flow chart"

Table 1
Parameter settings for each associated scene"
| 场景 | X方向速度分布/(m/s) | Y方向速度分布/(m/s) | Z方向速度分布/(m/s) | X方向加速度分布/(m/s2) | Y方向加速度分布/(m/s2) | Z方向加速度分布/(m/s2) | ρ |
| 场景1 | N(100, 1) | N(100, 1) | N(50, 1) | U(-10, 10) | U(-10, 10) | U(-1, 1) | 0.4 |
| 场景2 | N(10, 1) | N(10, 1) | N(5, 1) | U(-2, 2) | U(-2, 2) | U(-0.2, 0.2) | 0.4 |
| 场景3 | 10 | 5 | 1 | U(-0.1, 0.1) | U(-0.1, 0.1) | 0.01 | 0.4 |
| 场景 | σx2 | σy2 | σz2 | ε | εmin | εmax | 目标数量/批 |
| 场景1 | 20 | 20 | 10 | 0.9 | 0.6 | 0.9 | 50 |
| 场景2 | N(60, 2) | N(60, 2) | N(30, 2) | 0.9 | 0.6 | 0.9 | 50 |
| 场景3 | N(60, 2) | N(60, 2) | N(30, 2) | 0.9 | 0.6 | 0.9 | 50 |

Fig.2
Top view of target motion trajectory"
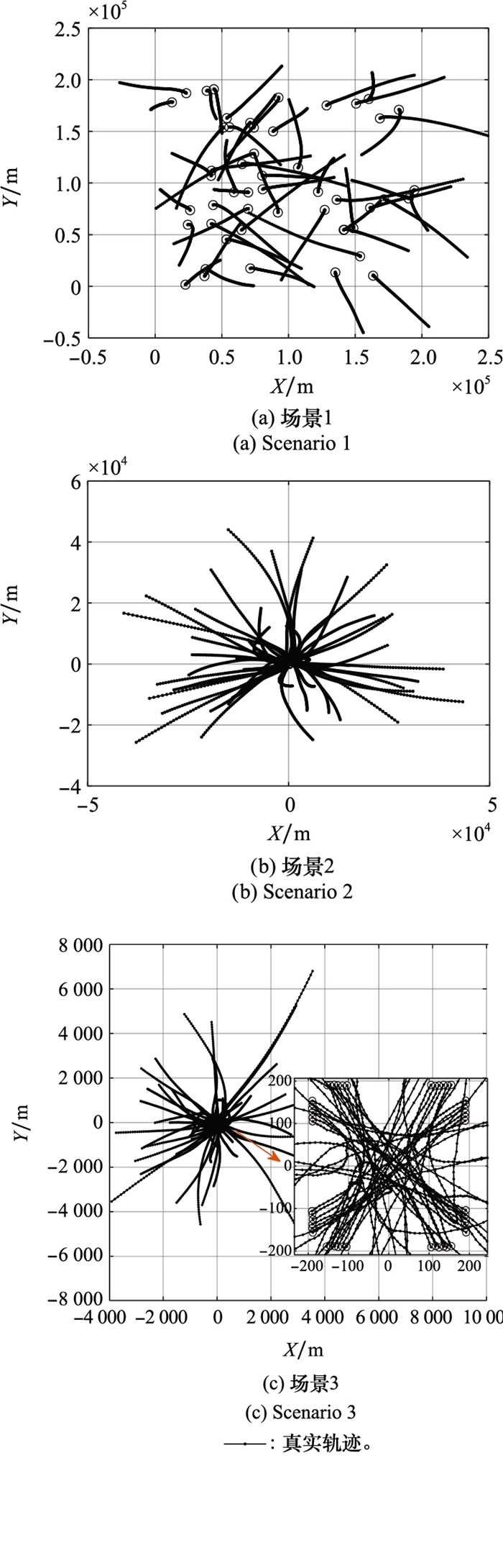
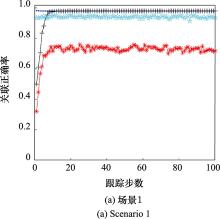
Fig.3
Instantaneous association accuracy of various algorithms in different scenarios"

Table 2
Correlation accuracy of each algorithm in different scenarios %"
| 场景 | 算法 | |||
| 加权法 | 模糊法 | 灰色分析法 | 本文算法 | |
| 场景1 | 72.05 | 94.06 | 96.54 | 98.32 |
| 场景2 | 36.04 | 54.92 | 81.06 | 97.16 |
| 场景3 | 31.26 | 50.24 | 75.92 | 93.65 |
Table 3
Time consumption of each algorithm in different scenarios s"
| 场景 | 算法 | |||
| 加权法 | 模糊法 | 灰色分析法 | 本文算法 | |
| 场景1 | 3.028 3 | 4.328 1 | 5.463 4 | 5.552 8 |
| 场景2 | 5.176 3 | 7.798 0 | 9.722 5 | 10.049 1 |
| 场景3 | 5.610 8 | 8.978 1 | 10.654 2 | 11.298 2 |

Fig.4
Correlation degree between the two algorithms' targets in step 1"


Fig.5
Correlation degree between the two algorithms' targets in step 5"


Fig.6
Correlation degree between the two algorithms' targets in step 10"


Fig.7
Correlation determination reliability of each target"

| 1 | 韩崇昭, 朱洪艳, 段战胜.多源信息融合[M].2版北京: 清华大学出版社,2010. |
| HAN C Z , ZHU H Y , DUAN Z S .Multi-source information fusion[M].2nd edBeijing: Press of Tsinghua University,2010. | |
| 2 |
NAZARI M , PASHAZADEH S , MOHAMMAD-KHANLI L .An adaptive density-based fuzzy clustering track association for distributed tracking system[J].IEEE Access,2019,7,135972-135981.
doi: 10.1109/ACCESS.2019.2941184 |
| 3 | SUN K, WEN Y J, CHEN X, et al. A method for track associa-tion using dynamic programming[C]//Proc. of the 6th International Conference on Control, Decision and Information Techno-logies, 2019: 1373-1378. |
| 4 | ZHANG X, HUANG H, CHEN Q L, et al. An improved track association and fusion method[C]//Proc. of the IEEE 14th International Conference on Signal Processing, 2018: 854-858. |
| 5 | MA M Y , WANG D J , ZHANG T , et al.Track-to-track association algorithm for passive multi-sensor system based on trajectory parameter[J].IET Radar, Sonar & Navigation,2021,15(4):348-358. |
| 6 | SINGER R A .Computer control of multiple site track data[J].Automation,1971,7(3):455-463. |
| 7 | BAR-SHALOM Y , FORTMAN T E .Tracking and association[M].New York: Aeademic Press,1988. |
| 8 | 何友, 陆大, 彭应宁, 等.多传感器数据融合系统中两种新的航迹相关算法[J].电子学报,1997,25(9):10-14, 19. |
| HE Y , LU D , PENG Y N , et al.Two new track correlation algorithms in a multisensor data fusion system[J].Acta Electronica Sinica,1997,25(9):10-14, 19. | |
| 9 |
AZIZ A M .Fuzzy track-to-track association and track fusion approach in distributed multisensor-multitarget multiple-attribute environment[J].Signal Processing,2007,87(6):1474-1492.
doi: 10.1016/j.sigpro.2007.01.001 |
| 10 | TUMMALA M, MIDWOOD S A. A fuzzy associative data fusion algorithm for vessel traffic system[R]. Monterey, Califomia: Naval Postgraduate School, 1998. |
| 11 | TUMMALA M, GLEM I, MIDWOOD S A. Multisensor data fusion for the vessel traffic system[R]. Monterey, Califomia: Naval Postgraduate School, 1996. |
| 12 | 崔亚奇, 何友, 唐田田, 等.一种深度学习航迹关联方法[J].电子学报,2022,50(3):759-763. |
| CUI Y Q , HE Y , TANG T T , et al.A deep learning track correlation method[J].Acta Electronica Sinica,2022,50(3):759-763. | |
| 13 | 黄虹玮, 刘玉娇, 沈卓恺, 等.基于深度学习网络模型的端到端航迹关联[J].计算机科学,2020,47(3):200-205. |
| HUANG H W , LIU Y J , SHEN Z K , et al.End-to-end track association based on deep learning network model[J].Computer Science,2020,47(3):200-205. | |
| 14 | 赵翻东, 蔡益朝, 李浩.基于GRNN神经网络的多目标航迹关联[J].信息系统工程,2021,(7):135-136, 140. |
| ZHAO F D , CAI Y C , LI H .Multitarget track association based on GRNN neural network[J].Information System Engineering,2021,(7):135-136, 140. | |
| 15 | 邓聚龙.灰色理论基础[M].武汉: 华中科技大学出版社,2003:30-35. |
| DENG J L .Fundamentals of grey theory[M].Wuhan: Huazhong University of Science & Techonlogy Press,2003:30-35. | |
| 16 | 刘思峰, 党耀国, 方志耕.灰色系统理论及其应用[M].北京: 科学出版社,2004:50-75. |
| LIU S F , DANG Y G , FANG Z G .Grey system theory and applications[M].Beijing: Science Press,2004:50-75. | |
| 17 |
GUAN X , HE Y , YI X .Grey track-to-track correlation algorithm for distributed multitarget tracking system[J].Signal Processing,2006,86(11):3448-3455.
doi: 10.1016/j.sigpro.2006.03.001 |
| 18 | 衣晓, 关欣, 何友.分布式多目标跟踪系统的灰色航迹关联模型[J].信号处理,2005,21(6):653-655. |
| YI X , GUAN X , HE Y .Modified gray track correlatioon model for distributec multitarget tracking system[J].Signal Processing,2005,21(6):653-655. | |
| 19 | 熊伟, 张晶炜, 何友.基于多维分配和灰色理论的航迹关联算法[J].电子与信息学报,2010,32(4):898-901. |
| XIONG W , ZHANG J W , HE Y .Track correlation algorithm based on multi-dimension assignment and gray theory[J].Journal of Electronics & Information Technology,2010,32(4):898-901. | |
| 20 | 董凯, 关欣, 王海鹏, 等.基于序贯修正灰关联度的全局最优航迹关联算法[J].电子与信息学报,2014,36(8):1939-1945. |
| DONG K , GUAN X , WANG H P , et al.Global optimal track association algorithm based on sequential modified grey association degree[J].Journal of Electronics & Information Technology,2014,36(8):1939-1945. | |
| 21 | 靳冰洋, 刘峥, 秦基凯.基于灰色关联度的两级实时航迹关联算法[J].兵工学报,2020,41(7):1330-1338. |
| JI B Y , LIU Z , QIN J K .Two-stage real-time track correlation algorithm based on gray correlation[J].Acta Armamentarii,2020,41(7):1330-1338. | |
| 22 |
LUO Z Y , FU Z H , XU Q W .An adaptive multi-dimensional vehicle driving state observer based on modified Sage-Husa UKF algorithm[J].Sensors,2020,20(23):6889.
doi: 10.3390/s20236889 |
| 23 |
ZHENG B Q , FU P C , LI B Q , et al.A robust adaptive unscented Kalman filter for nonlinear estimation with uncertain noise covariance[J].Sensors,2018,18(3):808.
doi: 10.3390/s18030808 |
| 24 | 叶泽浩, 宋亚伟, 陈传生, 等.基于噪声估计的自适应无迹卡尔曼滤波算法[J].空天预警研究学报,2022,36(4):242-246, 251. |
| YE Z H , SONG Y W , CHEN C S , et al.Adaptive unscented Kalman filtering algorithm based on noise estimation[J].Journal of Air & Space Early Warning Research,2022,36(4):242-246, 251. | |
| 25 | 张瑜, 吴凯, 郭杰, 等.基于数据质量评估的自适应序贯航迹关联算法[J].系统工程与电子技术,2022,44(11):3477-3485. |
| ZHANG Y , WU K , GUO J , et al.An adaptive sequential track-association algorithm based on data quality[J].Systems Engineering and Electronics,2022,44(11):3477-3485. | |
| 26 | DIAKOULAKI D , MAVROTAS G , PAPAYANNAKIS L .Determining objective weights in multiple criteria problems, the critic method[J].Computer & Operations Research,1995,22(7):763-770. |
| 27 | 胡涛, 王栋, 孙曜, 等.基于改进CRITIC-LRA和灰色逼近理想解排序法的空战威胁评估[J].兵工学报,2020,41(12):2561-2569. |
| HU T , WANG D , SUN Y , et al.Air combat threat assessment of improved CRITIC-LRA and grey TOPSIS[J].Acta Armamentarii,2020,41(12):2561-2569. | |
| 28 | 王坚浩, 王龙, 张亮, 等.灰色群组聚类和改进CRITIC赋权的供应商选择VIKOR多属性决策[J].系统工程与电子技术,2023,45(1):155-164. |
| WANG J H , WANG L , ZHANG L , et al.Supplier selection VIKOR multi-attribute decision making of group clustering and improved CRITCI weighting[J].Systems Engineering and Electronics,2023,45(1):155-164. | |
| 29 | 李小元, 王中原, 常思江.在线弹道参数滤波与辨识方法分析[J].弹道学报,2020,32(2):29-34. |
| LI X Y , WANG Z Y , CHANG S J .Online trajectory parameter filtering and identification method analysis[J].Journal of Ballistics,2020,32(2):29-34. | |
| 30 | SAGE A, HUSA G. Algorithms for sequential adaptive estimation of prior statistics[C]//Proc. of the IEEE 8th Symposium on Adaptive Processes Decision and Control, 1969. |
| 31 | WAN E A, MERWE R. The unscented Kalman filter for nonlinear estimation[C]//Proc. of the IEEE Adaptive Systems for Signal Processing, Communications, and Control Symposium, 2000. |
| [1] | Jiaen GUO, Zheng ZHOU, Rui ZENG. Multi-local node asynchronous track fast correlation algorithm [J]. Systems Engineering and Electronics, 2023, 45(3): 669-677. |
| [2] | Wei HAN, Guoshi WANG, Kai YAN, Yawei SONG. Target plot-to-track association method in Doppler blind zone based on multi-dimension assignment [J]. Systems Engineering and Electronics, 2023, 45(10): 3091-3097. |
| [3] | Kang LIU, Minghao HE, Jun HAN, Mingyue FENG, Xinglin DU. Data fusion algorithm for radar countermeasures and reconnaissance based on multi-sensor [J]. Systems Engineering and Electronics, 2023, 45(1): 101-107. |
| [4] | Taiyang HU, Jinyu ZHANG, Hailiang LU, Pengfei LI, Yinan LI, Rongchuan LYU. Distributed synthetic aperture microwave radiometric high-resolution imaging algorithm based on data fusion [J]. Systems Engineering and Electronics, 2022, 44(8): 2403-2409. |
| [5] | Xin GUAN, Jia'en GUO. Anti-bias track association algorithm based on sequential detection of iterative discrete degree [J]. Systems Engineering and Electronics, 2022, 44(8): 2498-2505. |
| [6] | Xiao YI, Rui ZENG, Xinying CAO. Asynchronous anti-bias track association algorithm by using k-nearest neighbors interval distance [J]. Systems Engineering and Electronics, 2022, 44(5): 1475-1482. |
| [7] | Xiao YI, Rui ZENG. Asynchronous track-to-track association algorithm based on k means distance of nearest neighbors [J]. Systems Engineering and Electronics, 2022, 44(11): 3515-3521. |
| [8] | Lulu ZHANG, Siya CHEN, Guang JIN. Evaluation modeling of spacecraft radiation resistance equivalent test [J]. Systems Engineering and Electronics, 2021, 43(9): 2673-2677. |
| [9] | Xiao YI, Jinpeng DU, Xinying CAO. Asynchronous track association of radar and electronic support measurements at different sites [J]. Systems Engineering and Electronics, 2021, 43(4): 954-960. |
| [10] | Shuangming LI, Xin GUAN, Ao LIU. Heterogeneous data fusion method based on intuitionistic fuzzy discout operator [J]. Systems Engineering and Electronics, 2021, 43(2): 311-317. |
| [11] | Daheng ZHANG, Yingjun ZHANG, Chuang ZHANG. Data fusion of electronic navigational chart and radar images based on Faster R-CNN [J]. Systems Engineering and Electronics, 2020, 42(6): 1267-1273. |
| [12] | Yaqi CUI, Wei XIONG, Xiangqi GU. Anti-bias association algorithm for marine target track based on triangular stability [J]. Systems Engineering and Electronics, 2020, 42(10): 2223-2230. |
| [13] | SHI Haijie, LI Jinghua, YUE Lu. Meteorological target detection method and simulation of airborne weather radar in cruise stage [J]. Systems Engineering and Electronics, 2018, 40(2): 280-286. |
| [14] | LI Hongfei, WANG Jinran, JING Zhongliang. Consensus combination rule to deal with conflicting evidence [J]. Systems Engineering and Electronics, 2018, 40(10): 2166-2172. |
| [15] | LI Zi-yue, ZHANG Lin, CHEN Shan-qiu, YANG Chun-ning, MA Long-hua. Ultra-tightly coupled SINS/GNSS navigation technology review and prospect [J]. Systems Engineering and Electronics, 2016, 38(4): 866-874. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||