Systems Engineering and Electronics ›› 2024, Vol. 46 ›› Issue (4): 1393-1400.doi: 10.12305/j.issn.1001-506X.2024.04.28
• Guidance, Navigation and Control • Previous Articles Next Articles
Ship inertial navigation system position correction method based on Bayesian neural network
Hongjin ZHOU1, Hui SONG1, Wenliang FAN2,*, Su WANG1, Dongliang GU1
- 1. Department of Navigation, Dalian Naval Academy, Dalian 116018, China
2. Department of Information Technology, National Prosecutors College of P.R.C, Beijing 102206, China
-
Received:2023-06-11Online:2024-03-25Published:2024-03-25 -
Contact:Wenliang FAN
CLC Number:
Cite this article
Hongjin ZHOU, Hui SONG, Wenliang FAN, Su WANG, Dongliang GU. Ship inertial navigation system position correction method based on Bayesian neural network[J]. Systems Engineering and Electronics, 2024, 46(4): 1393-1400.
share this article

Fig.1
Navigation parameters resolution flowchart of ship SINS"


Fig.2
BPNN training model"

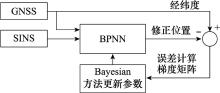
Fig.3
Algorithm training flowchart"

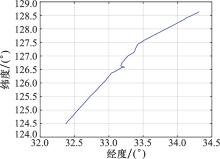
Fig.4
Ship trajectory"


Fig.5
Training epoch and duration vs. number of neuron"


Fig.6
Comparison curve of position error between independent- working inertial navigation system and INS with neural networking correction"

Table 1
Position error between independent-working INS and INS with neural networking correction"
| 神经元个数 | INS独立/m | 神经网络修正后/m | |||||
| 均值 | 均方根 | 最大值 | 均值 | 均方根 | 最大值 | ||
| 30 | 1 732.6 | 329.4 | 2 285.4 | 980.2 | 404.8 | 2 299.3 | |
| 40 | 1 732.6 | 329.4 | 2 285.4 | 1 307.3 | 584.8 | 2 877.0 | |
| 50 | 1 732.6 | 329.4 | 2 285.4 | 640.9 | 342.4 | 1 152.8 | |
| 60 | 1 732.6 | 329.4 | 2 285.4 | 921.6 | 355.4 | 2 078.9 | |

Fig.7
Independent-working INS position trajectory and trajectory with correction (with GPS-off of 2 h)"
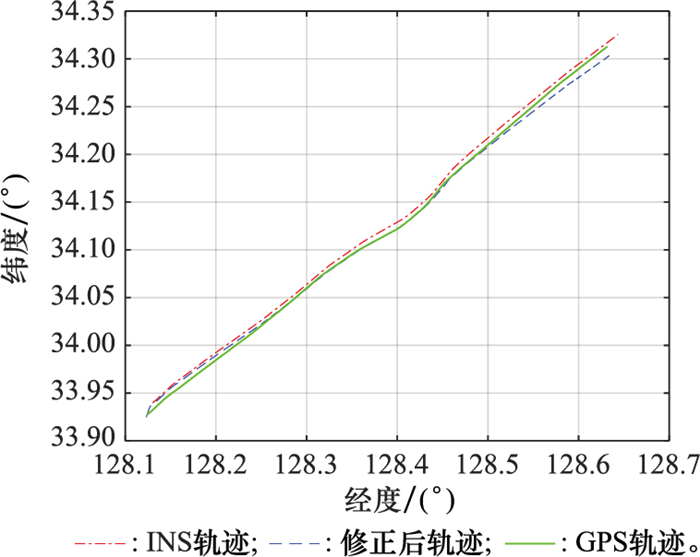
Table 2
Comparison of model performance between two methods"
| 模型 | 迭代周数 | 训练时间/s | 占用内存/MB | 模型计算时间/s | 误差均值/m | 误差均方根/m | 误差最大值/m |
| L-M | 18 | 164 | 125.452 | 0.35 | 2 941.2 | 2 190.1 | 16 803.2 |
| Bayesian | 14 | 128 | 68.518 | 0.33 | 640.9 | 342.4 | 1 152.8 |
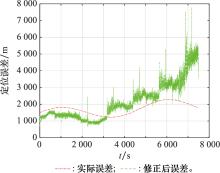
Fig.8
Position curve of independent-working INS and INS with L-M algorithm correction (60 neurons)"
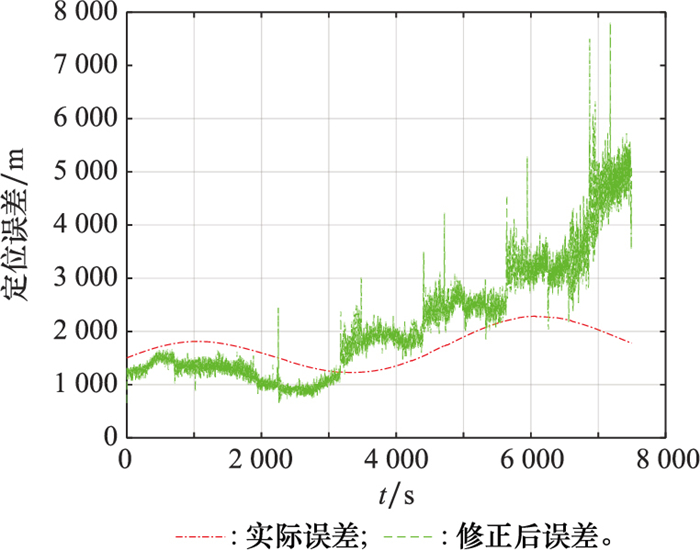

Fig.9
Error correction curve of INS position among three training samples"
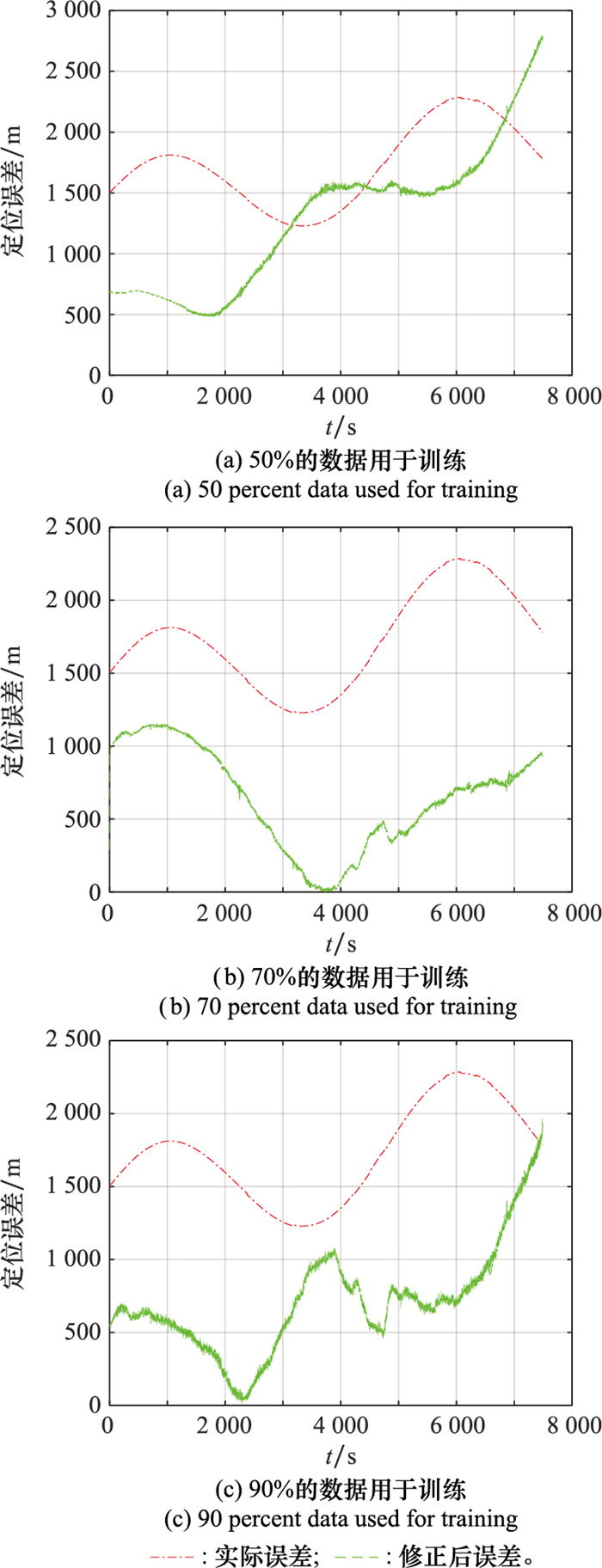
Table 3
Position error correction results of INS via three data training distribution schemes"
| 训练样本分配 | 误差均值/m | 误差均方根/m | 误差最大值/m |
| 方案A | 1 283.0 | 574.4 | 2 798.7 |
| 方案B | 640.9 | 342.4 | 1 152.8 |
| 方案C | 709.3 | 357.9 | 1 964.2 |
| 1 | 王思远, 刘海桥, 罗世彬, 等.基于高精度MEMS-INS的双轴旋转调制技术[J].传感器与微系统,2021,40(2):8-11. |
| WANG S Y , LIU H Q , LUO S B , et al.Dual-axis rotation modulation technology based on high precision MEMS-INS[J].Transducer and Microsystem Technologies,2021,40(2):8-11. | |
| 2 | 熊崴, 蔡智渊, 齐宇轩, 等.H调制陀螺监控高精度惯性导航系统[J].中国惯性技术学报,2010,18(4):387-395. |
| XIONG W , CAI Z Y , QI Y X , et al.High-accuracy inertial navigation system with H-modulation gyro monitoring[J].Journal of Chinese Inertial Technology,2010,18(4):387-395. | |
| 3 | 崔加瑞, 吴文启, 马铁锋, 等.双惯导联合旋转调制光纤陀螺标度因数误差自校正方法[J].中国惯性技术学报,2022,30(5):561-568. |
| CUI J R , WU W Q , MA T F , et al.Self-calibration of scale factor error for fiber optic gyroscope based on joint rotation modulation method of dual INS[J].Journal of Chinese Inertial Techno-logy,2022,30(5):561-568. | |
| 4 | 胡佩达, 高钟毓, 吴秋平, 等.壳体翻滚失准角模型最小二乘辨识方法[J].中国惯性技术学报,2009,17(4):393-396. |
| HU P D , GAO Z Y , WU Q P , et al.Least square identification method of the misalignment angle of gyro case rotation axis[J].Journal of Chinese Inertial Technology,2009,17(4):393-396. | |
| 5 | 黄凤荣, 朱雨晨, 杨泽清, 等.基于高斯混合模型的惯导/计程仪组合导航方法[J].中国惯性技术学报,2019,27(1):32-35. |
| HUANG F R , ZHU Y C , YANG Z Q , et al.SINS/EML navigation method based on Gaussian mixtures unscented Kalman filter[J].Journal of Chinese Inertial Technology,2019,27(1):32-35. | |
| 6 |
LI J , GU M Y , ZHU T L , et al.Research on error correction technology in underwater SINS/DVL integrated positioning and navigation[J].Sensors,2023,23(10):4700-4717.
doi: 10.3390/s23104700 |
| 7 |
LIU J X , KE D , PENG H , et al.A tight coupling algorithm for strapdown inertial navigation system/global positioning system adaptive integrated navigation based on variational Bayesian[J].Sustainability,2023,15(16):12477-12489.
doi: 10.3390/su151612477 |
| 8 |
MU P C , ZHANG X , QIN P , et al.A variational Bayesian-based simultaneous localization and mapping method for autonomous underwater vehicle navigation[J].Journal of Marine Science and Engineering,2022,10(10):1563-1577.
doi: 10.3390/jmse10101563 |
| 9 | LAI X , TONG S Q , ZHU G R I .Adaptive fuzzy neural network-aided progressive Gaussian approximate filter for GPS/INS integration navigation[J].Measurement,2022,20(10):1641-1656. |
| 10 | 付强文, 秦永元, 李四海.速度约束辅助车载捷联惯导系统零速校正算法[J].系统工程与电子技术,2013,35(8):1723-1728. |
| FU Q W , QIN Y Y , LI S H .ZUPT method for vehicular SINS aided by velocity constrain[J].System Engineering and Electronics,2013,35(8):1723-1728. | |
| 11 | SEMENIUK L , NOURELDIN A .Bridging GPS outages using neural network estimates of INS position and velocity errors[J].Measurement Science & Technology,2006,17(10):2783. |
| 12 |
JWO D , BISWAL A , MIR I A , et al.Artificial neural networks for navigation systems: a review of recent research[J].Applied Sciences,2023,13(7):4475-4486.
doi: 10.3390/app13074475 |
| 13 |
CHEN X , SHEN C , ZHANG W B , et al.Novel hybrid of strong tracking Kalman filter and wavelet neural network for GPS/INS during GPS outages[J].Measurement,2013,46(10):3847-3854.
doi: 10.1016/j.measurement.2013.07.016 |
| 14 | XU Y , WANG K , JIANG C H , et al.Motion-constrained GNSS/INS integrated navigation method based on BP neural network[J].Remote Sensing,2023,15(1):154-167. |
| 15 |
WANG G C , XU X S , TONG J W .A novel BPNN-based method to overcome the GPS outages for INS/GPS system[J].IEEE Access,2019,7,82134-82143.
doi: 10.1109/ACCESS.2019.2922212 |
| 16 |
SPECHT M .Consistency analysis of global positioning system position errors with typical statistical distributions[J].Journal of Navigation,2021,74(6):1201-1218.
doi: 10.1017/S0373463321000485 |
| 17 | SAADEDDIN K , ABDEL-HAFEZ M F , JARADAT M A , et al.Optimization of intelligent approach for low-cost INS/GPS navigation system[J].Journal of Intelligent & Robotic Systems,2014,73(1/4):325-348. |
| 18 | WANG L H , YE W J , ZHOU Y T .Optimal parameters selection of back propagation algorithm in the feed forward neural network[J].Engineering Analysis with Boundary Elements,2023,151(13):575-596. |
| 19 |
SILVA M E , PEREIRA I , MCCABE B .Bayesian outlier detection in non-Gaussian autoregressive time series[J].Journal of Time Series Analysis,2019,40(5):631-648.
doi: 10.1111/jtsa.12439 |
| 20 | 陈怀宇, 尹达一, 张泉, 等.LSTM网络提高MEMS惯导定位精度的分析及验证[J].中国惯性技术学报,2018,26(5):610-615. |
| CHEN H Y , YIN D Y , ZHANG Q , et al.Analysis and verification on improving MEMS navigation accuracy based on LSTM network[J].Journal of Chinese Inertial Technology,2018,26(5):610-615. | |
| 21 | 李宇寰, 杨功流, 于沛, 等.基于Bagging模型的惯导系统误差抑制方法[J].中国惯性技术学报,2017,25(1):63-66. |
| LI Y H , YANG G L , YU P , et al.Error restraining method for SINS based on Bagging model[J].Journal of Chinese Inertial Technology,2017,25(1):63-66. | |
| 22 | 黄凤荣, 羿博珩, 王旭, 等.基于深度学习与运动状态识别的车辆惯性导航方法[J].中国惯性技术学报,2022,30(5):569-575. |
| HUANG F G , YI B H , WANG X , et al.Vehicle inertial navigation method based on deep learning and motion constraints[J].Journal of Chinese Inertial Technology,2022,30(5):569-575. | |
| 23 | 胥涯杰, 鲜勇, 李邦杰, 等.基于神经网络的高超声速飞行器惯导系统精度提高方法[J].系统工程与电子技术,2022,44(4):1301-1309. |
| XU Y J , XIAN Y , LI B J , et al.Method for improving the precision of hypersonic vehicle inertial navigation system based on neural network[J].System Engineering and Electronics,2022,44(4):1301-1309. | |
| 24 | 卞鸿巍, 李安, 王荣颖, 等.导航概论[M].北京: 科学出版社,2023. |
| BIAN H W , LI A , WANG R Y , et al.Introduction to Navigation[M].Beijing: Science Press,2023. | |
| 25 |
WANG J H , HUANG Z H .The recent technological development of intelligent mining in China[J].Engineering,2017,3(4):439-444.
doi: 10.1016/J.ENG.2017.04.003 |
| 26 | CHEN L , MA Y F .Shamanskii-like Levenberg-Marquardt method with a new line search for systems of nonlinear equations[J].Journal of Systems Science and Complex,2020,33(1):1694-1707. |
| [1] | Yue LENG, Sheng ZHONG. Compensation method for gravity disturbance in celestial/inertial integrated system [J]. Systems Engineering and Electronics, 2024, 46(4): 1357-1363. |
| [2] | Hu TANG, Guanghui ZENG, Yi LIAO, Wenqin WANG. Position error analysis of FDA elements via interval algorithm [J]. Systems Engineering and Electronics, 2023, 45(1): 15-24. |
| [3] | Geng XU, Yongxu HE, Yonggang ZHANG. Inertial-frame-based transfer alignment using Rodriguez parameters [J]. Systems Engineering and Electronics, 2022, 44(9): 2903-2913. |
| [4] | Yang LI, Meng LIU, Jing GONG, Yongzhao WANG, Fujian DENG. Double-velocity inertial-frame alignment algorithm with pseudo INS modeling in polar regions [J]. Systems Engineering and Electronics, 2022, 44(5): 1677-1684. |
| [5] | Yongqiang XIAO, Hongli WANG, Lei FENG, Sihai YOU, Yiyang HE, Qiang XU. Pulsar position error estimation algorithm with corrected clock error [J]. Systems Engineering and Electronics, 2021, 43(3): 789-795. |
| [6] | Zhenyu XIONG, Yaqi CUI, Wei XIONG, Xiangqi GU. Adaptive association for satellite and radar position data [J]. Systems Engineering and Electronics, 2021, 43(1): 91-98. |
| [7] | Donghua HUANG, Yongsheng ZHAO, Yongjun ZHAO. Target localization algorithm from DOA-TDOA measurements in passive radar with transmitter and receiver position errors [J]. Systems Engineering and Electronics, 2020, 42(9): 1961-1968. |
| [8] | Shiwen HAO, Zhili ZHANG, Zhaofa ZHOU, Zhenjun CHANG, Xianyi LIU. Influence of gravity disturbance on initial alignment of inertial navigation system [J]. Systems Engineering and Electronics, 2020, 42(7): 1575-1581. |
| [9] | Xiaoyu LIU, Jianxin WU, Tong WANG, Jinming CHEN. Phase synchronization error estimation based on prominent scatterers for UAV distributed coherent aperture radar [J]. Systems Engineering and Electronics, 2020, 42(4): 781-791. |
| [10] | CHEN Guangdong, HUANG Yuze, WANG Yuan. Intra-group short-range location of aircraft based on polarization steering factor [J]. Systems Engineering and Electronics, 2019, 41(5): 958-963. |
| [11] | JIANG Xiuhong, DUAN Fuhai, HU Ailing. Predictive maintenance for multistate system based on maintenance importance [J]. Systems Engineering and Electronics, 2018, 40(4): 839-844. |
| [12] | FANG Min, CHENG Ziyang, HE Zishu, LI Jun. Multi-target paring algorithm for distributed radar with INS error [J]. Systems Engineering and Electronics, 2018, 40(2): 308-313. |
| [13] | XIA Weixing, YANG Xiaodong. ESO estimation algorithm for gyro drift of INS [J]. Systems Engineering and Electronics, 2018, 40(12): 2804-2809. |
| [14] | WANG Wenyi, ZHU Te, WU Renbiao. Low complexity passive calibration algorithm for ADS-B anti-jamming antenna arrays [J]. Systems Engineering and Electronics, 2017, 39(9): 1915-1920. |
| [15] | WANG Wei, GUO Huijie, MENG Yue. Satellite/pseudolite/INS integrated navigation algorithm [J]. Systems Engineering and Electronics, 2017, 39(2): 391-397. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||