Systems Engineering and Electronics ›› 2021, Vol. 43 ›› Issue (11): 3305-3311.doi: 10.12305/j.issn.1001-506X.2021.11.31
• Guidance, Navigation and Control • Previous Articles Next Articles
UAV path planning based on improved artificial potential field
Yao HAN*, Shaohua LI
- School of Aeronautics and Astronautics, University of Electronic Science and Technology of China, Chengdu 611731, China
-
Received:2021-01-25Online:2021-11-01Published:2021-11-12 -
Contact:Yao HAN
CLC Number:
Cite this article
Yao HAN, Shaohua LI. UAV path planning based on improved artificial potential field[J]. Systems Engineering and Electronics, 2021, 43(11): 3305-3311.
share this article

Fig.1
Resultant force of TAPF algorithm"

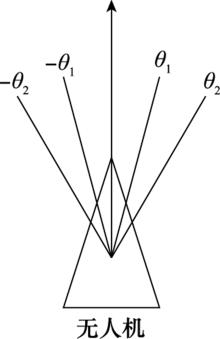
Fig.2
Angle threshold"


Fig.3
Auxiliary avoidance force"

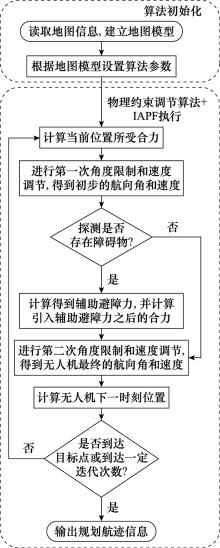
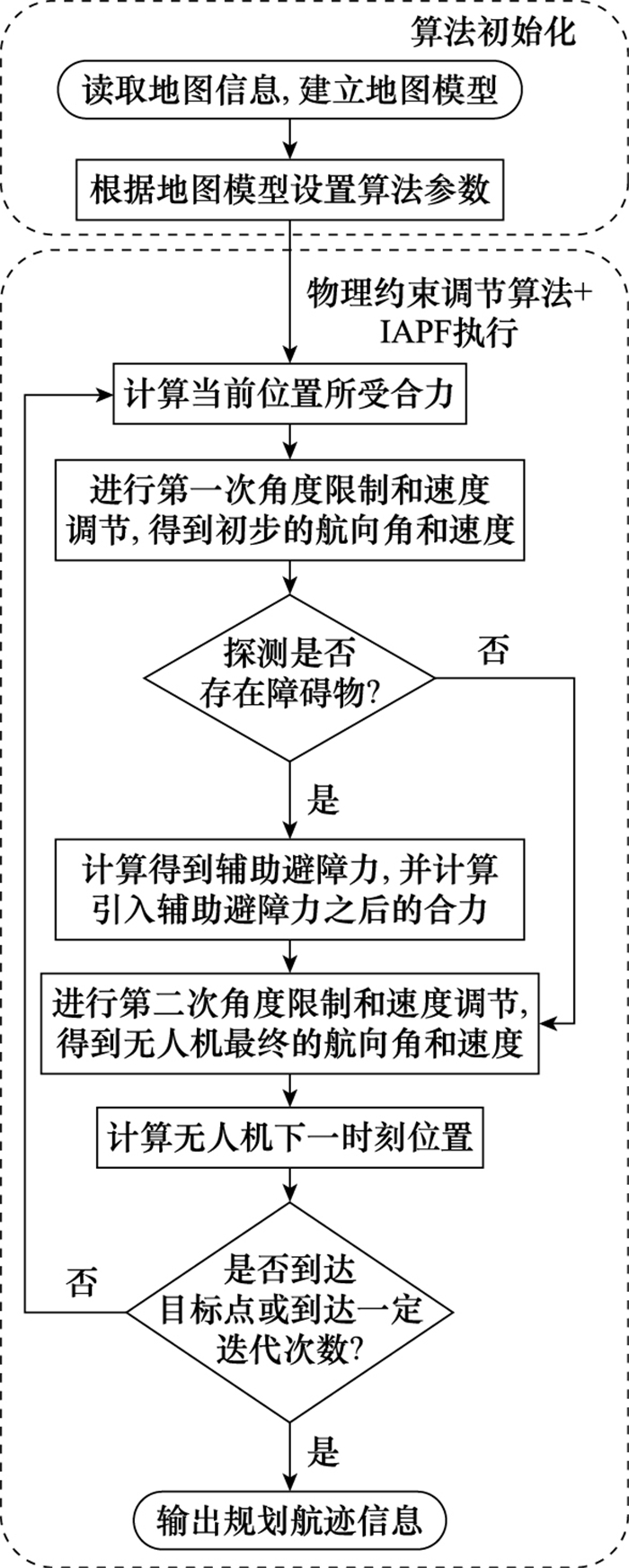
Fig.4
Path planning strategy"
"
| 参数 | 值 |
| 起始点 | (36, 36) |
| 目标点 | (2, 2) |
| 引力系数Ka | 5 |
| 斥力系数Kr | 200 |
| 障碍物斥力范围do/m | 2ro |
| 最小速度Vmin/(m/s) | 0.5 |
| 常规速度Vc/(m/s) | 0.8 |
| 最大速度Vmax/(m/s) | 1 |
| 最大转向角Δθmax/(°) | 30 |
| 角度阈值θ1/(°) | 10 |
| 角度阈值θ2/(°) | 20 |
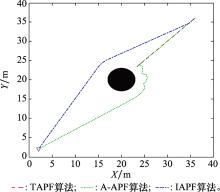
Fig.5
Local minimum point"


Fig.6
Comparison of improved algorithms and traditional algorithm"


Fig.7
Multiple obstacles"

Table 2
Comparison of algorithm simulations in the case of random multi-obstacle maps"
| 序号 | 最大转向角/(°)/轨迹长度/m/飞行时间/s | ||
| TAPF | A-APF | IAPF | |
| 1 | -356.18/124/155 | -347.41/115.2/128 | 30/109.7/125 |
| 2 | 147.63/112.8/141 | 98.54/107.1/119 | 30/105.7/113 |
| 3 | 303.97/125.6/157 | 61.35/111.6/124 | 30/108.7/125 |
| 4 | 153.1/123.2/154 | 89.57/115.2/128 | 30/111.4/125 |
| 5 | -297.73/114.4/143 | -343.32/107.1/119 | 20.53/105.8/113 |
| 6 | 327.7/121.6/152 | 336.58/112.5/125 | 30/109.4/130 |
| 7 | 142.64/116/145 | 48.8/108/120 | 30/106.2/116 |
| 1 |
KERNS A J , SHEPARD D P , BHATTI J A , et al. Unmanned aircraft capture and control via GPS spoofing[J]. Journal of Field Robotics, 2014, 31 (4): 617- 636.
doi: 10.1002/rob.21513 |
| 2 |
SAFADINHO D , RAMOS J , RIBEIRO R , et al. UAV landing using computer vision techniques for human detection[J]. Sensors, 2020, 20 (3): 613.
doi: 10.3390/s20030613 |
| 3 | 高升, 艾剑良, 王之豪. 混合种群RRT无人机航迹规划方法[J]. 系统工程与电子技术, 2020, 42 (1): 101- 107. |
| GAO S , AI J L , WANG Z H . Mixed population RRT algorithm for UAV path planning[J]. Systems Engineering and Electronics, 2020, 42 (1): 101- 107. | |
| 4 | ZHANG Z , LI J X , WANG J . Sequential convex programming for nonlinear optimal control problem in UAV path planning[J]. Aerospace Science & Technology, 2018, 76 (1): 280- 290. |
| 5 |
ZHENG C W , LI L , XU F J , et al. Evolutionary route planner for unmanned air vehicles[J]. IEEE Trans. on Robotics, 2005, 21 (4): 609- 620.
doi: 10.1109/TRO.2005.844684 |
| 6 |
王琼, 刘美万, 任伟建, 等. 无人机航迹规划常用算法综述[J]. 吉林大学学报(信息科学版), 2019, 37 (1): 58- 67.
doi: 10.3969/j.issn.1671-5896.2019.01.008 |
|
WANG Q , LIU M W , REN W J , et al. Overview of common algorithms for UAV path planning[J]. Journal of Jilin University (Information Science Edition), 2019, 37 (1): 58- 67.
doi: 10.3969/j.issn.1671-5896.2019.01.008 |
|
| 7 |
SARAVANAKUMAR S , ASOKAN T . Multipoint potential field method for path planning of autonomous underwater vehicles in 3D space[J]. Intelligent Service Robotics, 2013, 6 (4): 211- 224.
doi: 10.1007/s11370-013-0138-2 |
| 8 | KUMAR P B , RAWAT H , PARHI D R . Path planning of humanoids based on artificial potential field method in unknown environments[J]. Expert Systems, 2019, 36 (2): 1- 12. |
| 9 |
YAO Q F , ZHENG Z Y , QI L , et al. Path planning method with improved artificial potential field — a reinforcement learning perspective[J]. IEEE Access, 2020, 8, 135513- 135523.
doi: 10.1109/ACCESS.2020.3011211 |
| 10 |
CHEN P Y , SHEN P F , ZHANG P , et al. Path planning of underwater terrain-aided navigation based on improved artificial potential field method[J]. Marine Technology Society Journal, 2019, 53 (2): 65- 74.
doi: 10.4031/MTSJ.53.2.7 |
| 11 | SINGH Y , SHARMA S , SUTTON R , et al. A constrained A* approach towards optimal path planning for an unmanned surface vehicle in a maritime environment containing dynamic obstacles and ocean currents[J]. Ocean Engineering, 2018, 169 (9): 187- 201. |
| 12 |
SONG R , LIU Y C , BUCKNALL R . Smoothed A* algorithm for practical unmanned surface vehicle path planning[J]. Applied Ocean Research, 2019, 83, 9- 20.
doi: 10.1016/j.apor.2018.12.001 |
| 13 |
BEHNCK L P , DOERING D , PEREIRACE , et al. A modified simulated annealing algorithm for SUAVs path planning[J]. IFAC PapersOnLine, 2015, 48 (10): 63- 68.
doi: 10.1016/j.ifacol.2015.08.109 |
| 14 |
GAO W X , TANG Q , YE B F , et al. An enhanced heuristic ant colony optimization for mobile robot path planning[J]. Soft Computing, 2020, 24 (8): 6139- 6150.
doi: 10.1007/s00500-020-04749-3 |
| 15 | PANDEY P , SHUKLA A , TIWARI R . Three-dimensional path planning for unmanned aerial vehicles using glowworm swarm optimization algorithm[J]. International Journal of System Assurance Engineering and Management, 2018, 9 (4): 836- 852. |
| 16 |
ROBERGE V , TARBOUCHI M , LABONTE G . Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning[J]. IEEE Trans. on Industrial Informatics, 2013, 9 (1): 132- 141.
doi: 10.1109/TII.2012.2198665 |
| 17 |
XIN J F , ZHONG J B , YANG F R , et al. An improved genetic algorithm for path-planning of unmanned surface vehicle[J]. Sensors, 2019, 19 (11): 2640.
doi: 10.3390/s19112640 |
| 18 | LAMINI C , BENHLIMA S , ELBEKRI A . Genetic algorithm based approach for autonomous mobile robot path planning[J]. Procedia Computer Science, 2018, 127 (1): 180- 189. |
| 19 |
KHATIB O . Real-time obstacle avoidance for manipulators and mobile robots[J]. International Journal of Robotics Research, 1986, 5 (1): 90- 98.
doi: 10.1177/027836498600500106 |
| 20 | MABROUK M H , MCINNES C R . Solving the potential field local minimum problem using internal agent states[J]. Robotics and Autonomous Systems, 2018, 56 (12): 1050- 1060. |
| 21 |
ZHU Y , ZHANG T , SONG J Y . Study on the local minima problem of path planning using potential field method in unknown environments[J]. Acta Automatica Sinica, 2010, 36 (8): 1122- 1130.
doi: 10.3724/SP.J.1004.2010.01122 |
| 22 | 韩知玖, 吴文江, 李孝伟, 等. 一种改进的动力学约束人工势场法[J]. 上海大学学报(自然科学版), 2019, 25 (6): 879- 887. |
| HAN Z J , WU W J , LI X W , et al. An improved artificial potential field method constrained by a dynamic model[J]. Journal of Shanghai University (Natural Science), 2019, 25 (6): 879- 887. | |
| 23 |
梁献霞, 刘朝英, 宋雪玲, 等. 改进人工势场法的移动机器人路径规划研究[J]. 计算机仿真, 2018, 35 (4): 291- 294, 361.
doi: 10.3969/j.issn.1006-9348.2018.04.063 |
|
LIANG X X , LIU C Y , SONG X L , et al. Research on improved artificial potential field approach in local path planning for mobile robot[J]. Computer Simulation, 2018, 35 (4): 291- 294, 361.
doi: 10.3969/j.issn.1006-9348.2018.04.063 |
|
| 24 | LADDHA A, KOCAMAZ M K, NAVARRO L E, et al. Map-supervised road detection[C]//Proc. of the IEEE Intelligent Vehicles Symposium, 2016: 118-123. |
| 25 |
CHEN Y B , LUO G C , MEI Y S , et al. UAV path planning using artificial potential field method updated by optimal control theory[J]. International Journal of Systems Science, 2016, 47 (6): 1407- 1420.
doi: 10.1080/00207721.2014.929191 |
| 26 |
王强, 张安, 吴忠杰. 改进人工势场法与模拟退火算法的无人机航路规划[J]. 火力与指挥控制, 2014, (8): 70- 73.
doi: 10.3969/j.issn.1002-0640.2014.08.017 |
|
WANG Q , ZHANG A , WU Z J . UAV route planning based on improved artificial potential field method and simulated annealing algorithm[J]. Fire Control and Command Control, 2014, (8): 70- 73.
doi: 10.3969/j.issn.1002-0640.2014.08.017 |
|
| 27 |
XU J , PARK K S . A real-time path planning algorithm for cable-driven parallel robots in dynamic environment based on artificial potential guided RRT[J]. Microsystem Technologies, 2020, 26 (11): 3533- 3546.
doi: 10.1007/s00542-020-04948-w |
| 28 |
PARK S O , LEE M C , KIM J . Trajectory planning with collision avoidance for redundant robots using jacobian and artificial potential field-based real-time inverse kinematics[J]. International Journal of Control, Automation and Systems, 2020, 18 (8): 2095- 2107.
doi: 10.1007/s12555-019-0076-7 |
| 29 |
ZHA M , WANG Z W , FENG J , et al. Unmanned vehicle route planning based on improved artificial potential field method[J]. Journal of physics: Conference series, 2020, 1453 (1): 012059.
doi: 10.1088/1742-6596/1453/1/012059/pdf |
| 30 | SONG J , HAO C , SU J C . Path planning for unmanned surface vehicle based on predictive artificial potential field[J]. International Journal of Advanced Robotic Systems, 2020, 17 (2): 1- 13. |
| 31 |
程志, 张志安, 李金芝, 等. 改进人工势场法的移动机器人路径规划[J]. 计算机工程与应用, 2019, 55 (23): 29- 34.
doi: 10.3778/j.issn.1002-8331.1904-0472 |
|
CHENG Z , ZHANG Z A , LI J Z , et al. Mobile robots path planning based on improved artificial potential field[J]. Computer Engineering and Applications, 2019, 55 (23): 29- 34.
doi: 10.3778/j.issn.1002-8331.1904-0472 |
| [1] | Haobo FENG, Qiao HU, Zhenyi ZHAO. AUV swarm path planning based on elite family genetic algorithm [J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. |
| [2] | Dou CHEN, Xiuyun MENG. UAV offline path planning based on self-adaptive coyote optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(2): 603-611. |
| [3] | Yang YIN, Quanshun YANG, Zheng WANG, Yang LIU. USV cluster coverage search method with communication distance constraint [J]. Systems Engineering and Electronics, 2022, 44(12): 3821-3828. |
| [4] | Qingqing YANG, Yingying GAO, Yu GUO, Boyuan XIA, Kewei YANG. Target search path planning for naval battle field based on deep reinforcement learning [J]. Systems Engineering and Electronics, 2022, 44(11): 3486-3495. |
| [5] | Tong HAN, Andi TANG, Huan ZHOU, Dengwu XU, Lei XIE. Multiple UAV cooperative path planning based on LASSA method [J]. Systems Engineering and Electronics, 2022, 44(1): 233-241. |
| [6] | Weiqiang MA, Yongqi GAO, Miao ZHAO. Global-best difference-mutation brain storm optimization algorithm [J]. Systems Engineering and Electronics, 2022, 44(1): 270-278. |
| [7] | Lei LAI, Kun ZOU, Dewei WU, Baozhong LI. Multi-UAV cooperative path planning based on improved MOFA evolution of interactive strategy [J]. Systems Engineering and Electronics, 2021, 43(8): 2282-2289. |
| [8] | Zhiqiang JIAO, Jieyong ZHANG, Peiyang YAO, Xun WANG, Yichao HE. Distributed evolution method of C4ISR service deployment based on hierarchical structure [J]. Systems Engineering and Electronics, 2021, 43(6): 1572-1585. |
| [9] | Wenming WANG, Jialu DU. Agent path planning based on regular hexagon grid JPS algorithm [J]. Systems Engineering and Electronics, 2021, 43(12): 3635-3642. |
| [10] | Yanan LI, Haibin HUANG, Liangming CHEN, Yufei ZHUANG, Xiaoli WANG. Energy-optimal three-dimensional path planning for AUV under changing ocean current environment [J]. Systems Engineering and Electronics, 2021, 43(12): 3667-3674. |
| [11] | Wengang LI, Liujiang WANG, Dexiang FANG, Yuwei LI, Jun Huang. Path planning algorithm combining A* with DWA [J]. Systems Engineering and Electronics, 2021, 43(12): 3694-3702. |
| [12] | Daidai CHEN, Wanyou LI. Local path planning algorithm for USV with towed cable [J]. Systems Engineering and Electronics, 2020, 42(9): 1988-1994. |
| [13] | Quanxian ZHANG, Bin ZENG, Houpu LI. Underway replenishment path planning method for distributed naval warfare under the influence of sea conditions [J]. Systems Engineering and Electronics, 2020, 42(10): 2312-2319. |
| [14] | Sheng GAO, Jianliang AI, Zhihao WANG. Mixed population RRT algorithm for UAV path planning [J]. Systems Engineering and Electronics, 2020, 42(1): 101-107. |
| [15] | YANG Xiuxia, CAO Weiyi, ZHANG Yi. Bi-arc path planning with time and angle constraints [J]. Systems Engineering and Electronics, 2019, 41(8): 1835-1843. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||