Systems Engineering and Electronics ›› 2026, Vol. 48 ›› Issue (1): 278-289.doi: 10.12305/j.issn.1001-506X.2026.01.25
• Guidance, Navigation and Control • Previous Articles Next Articles
Dynamic periodic event-triggered bipartite consensus for multi-agent systems
Zonggang LI1,2,*, Jintao QIU1,2, Xiaogang NING1,2, Yinjuan CHEN1,2
- 1. School of Mechanical Engineering,Lanzhou Jiaotong University,Lanzhou 730070,China
2. Robotics Institute,Lanzhou Jiaotong University,Lanzhou 730070,China
-
Received:2024-12-09Online:2026-01-25Published:2026-02-11 -
Contact:Zonggang LI
CLC Number:
Cite this article
Zonggang LI, Jintao QIU, Xiaogang NING, Yinjuan CHEN. Dynamic periodic event-triggered bipartite consensus for multi-agent systems[J]. Systems Engineering and Electronics, 2026, 48(1): 278-289.
share this article
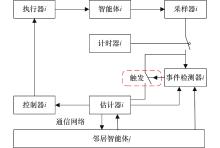
Fig.1
Communication and control flow diagram"
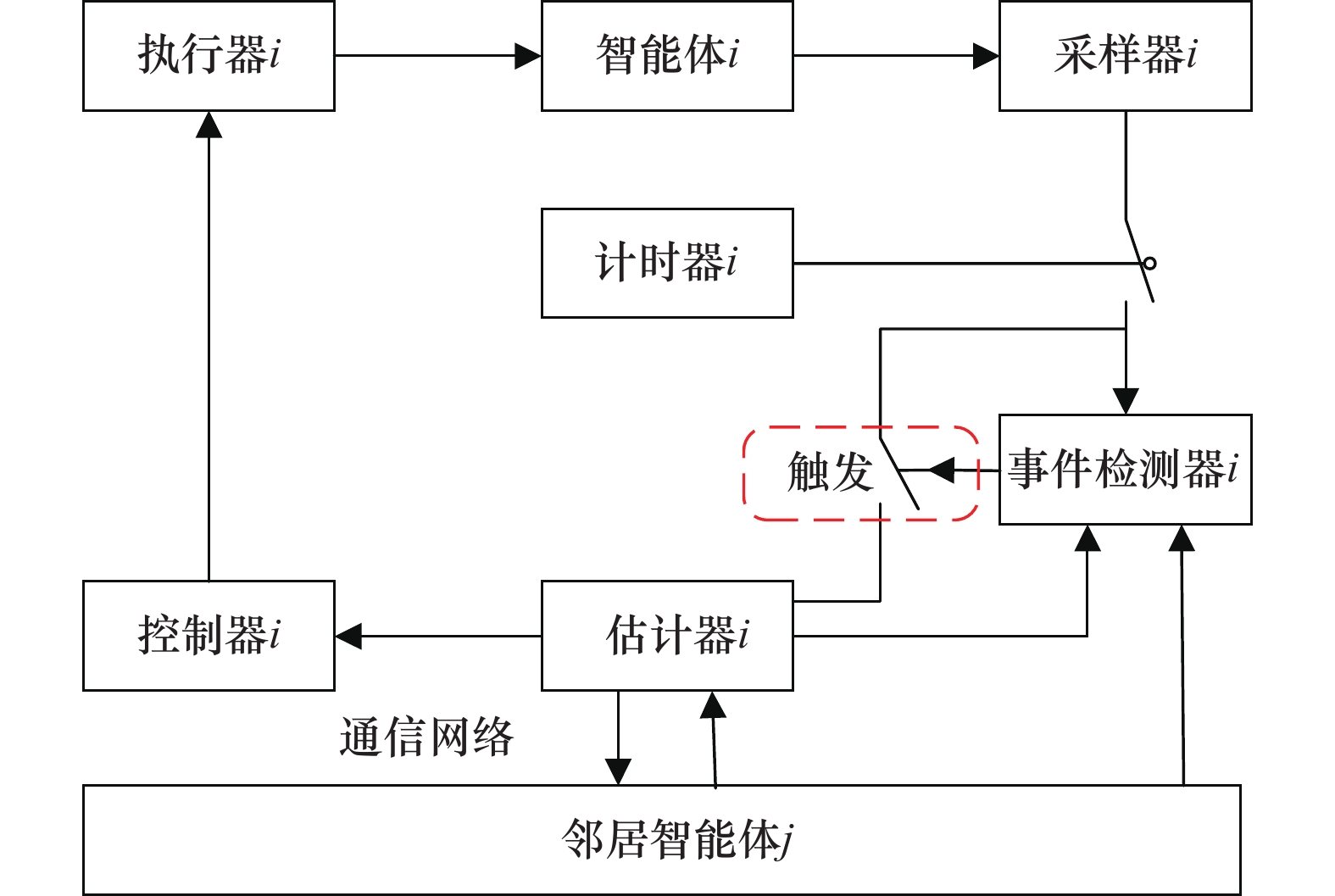
Fig.2
Communication network topology"
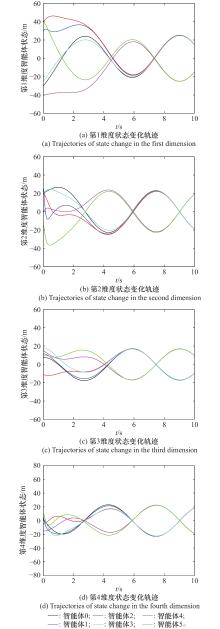
Fig.3
State change trajectory of each agent"
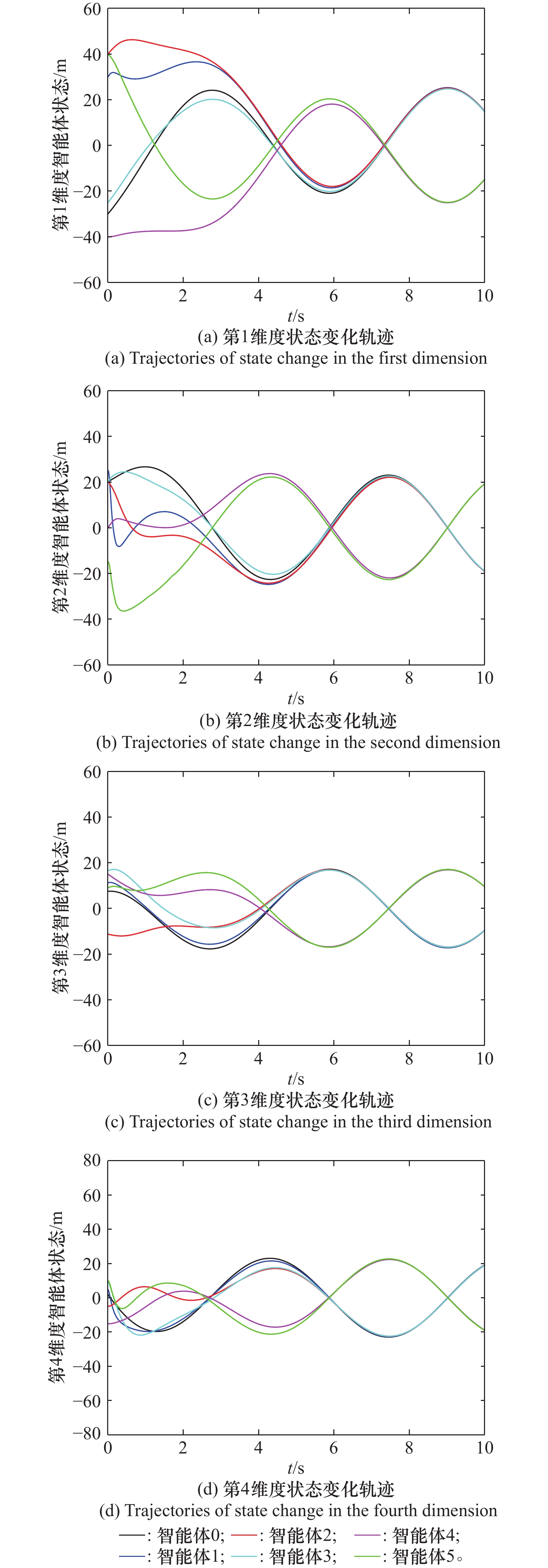
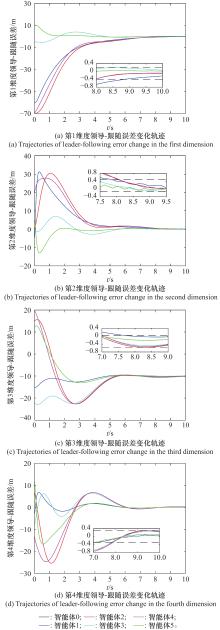
Fig.4
Leader-following error of each agent"

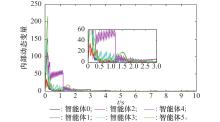
Fig.5
Internal dynamic variable of each agent"
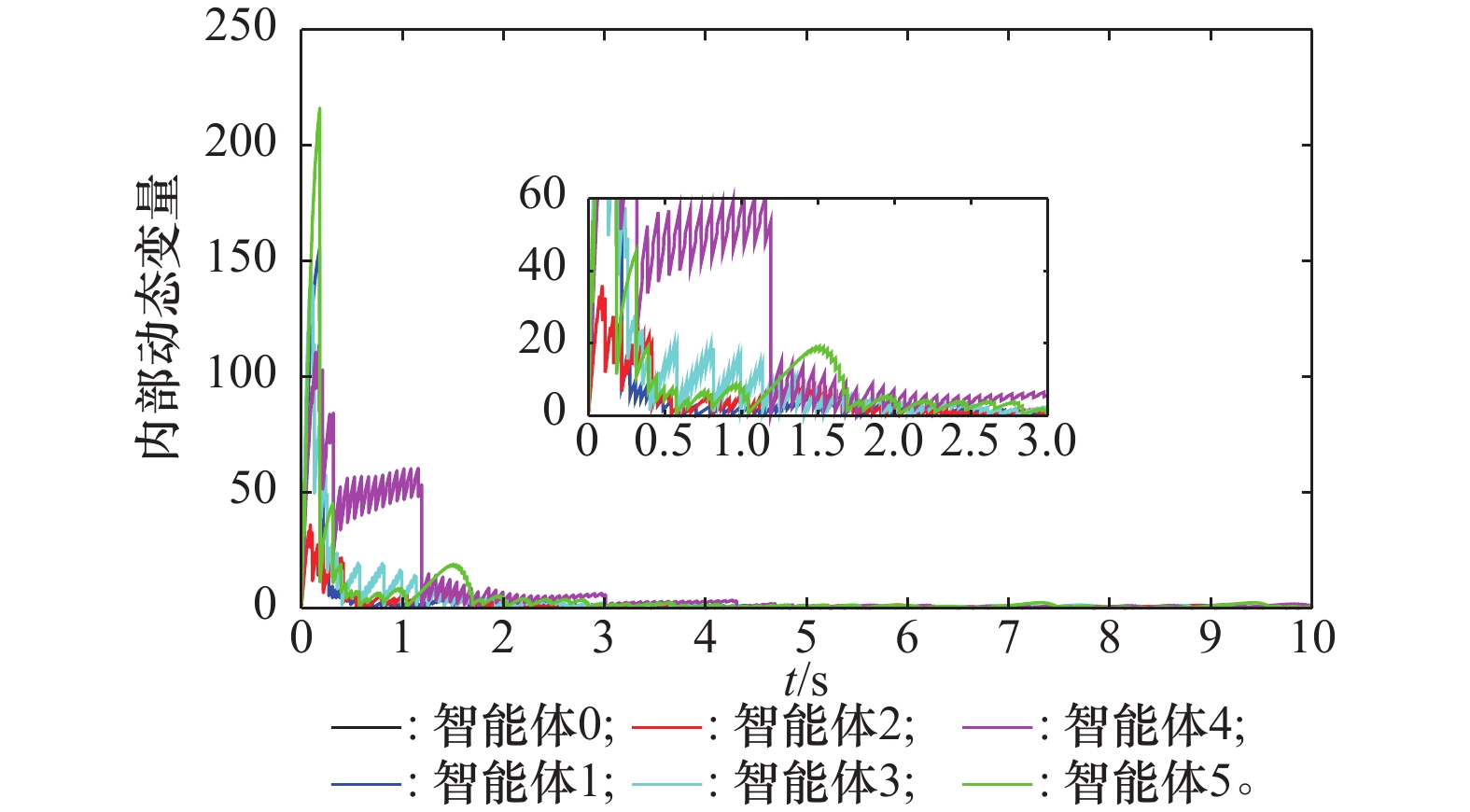
Fig.6
Adaptive parameter of each agent"
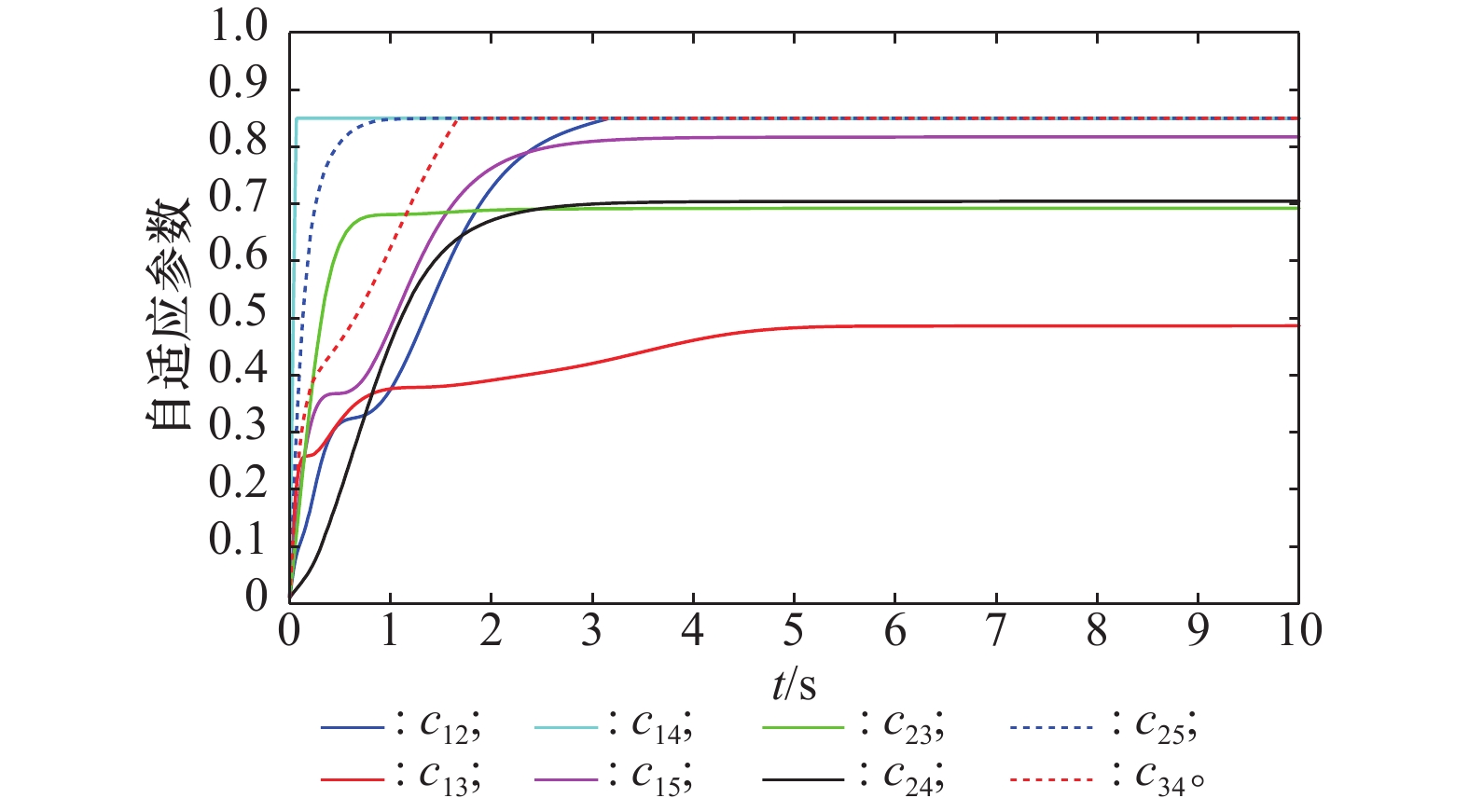
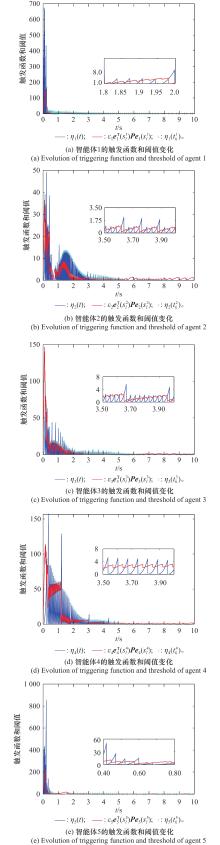
Fig.7
Relationship between the trigger function and the trigger threshold of each agent"
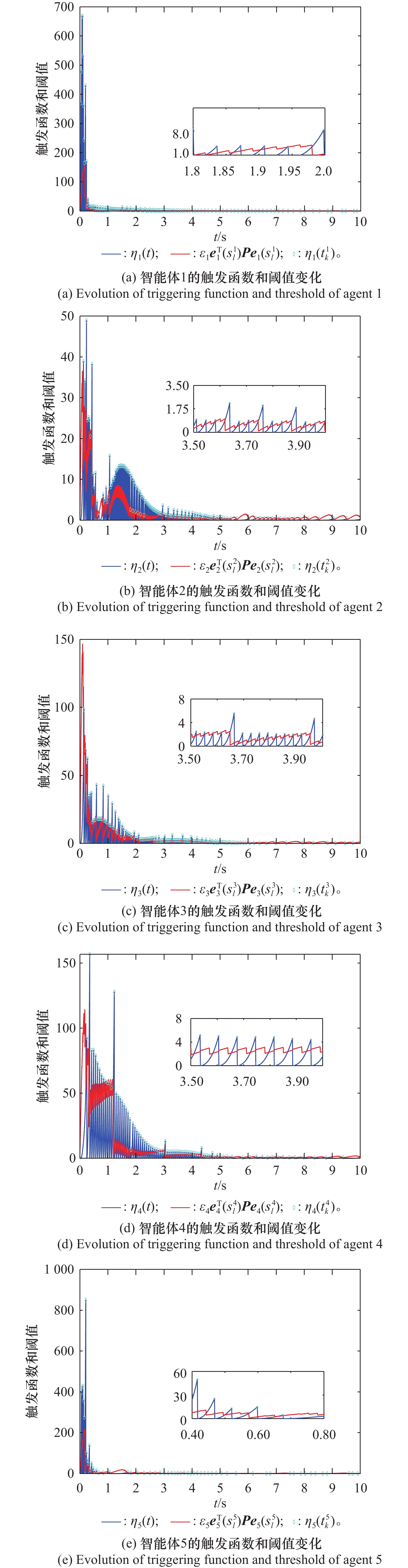
Fig.8
Triggering instant of each agent"
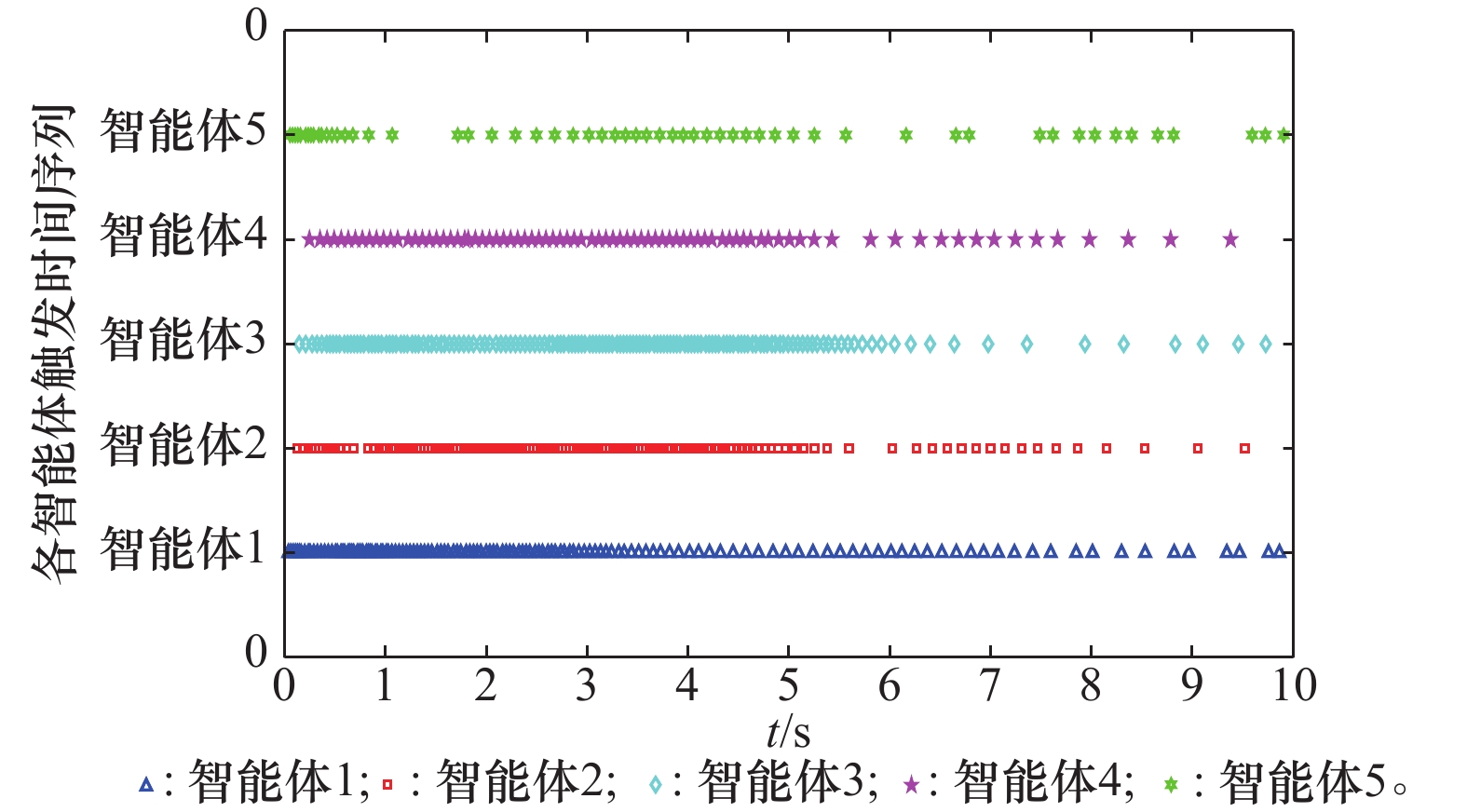
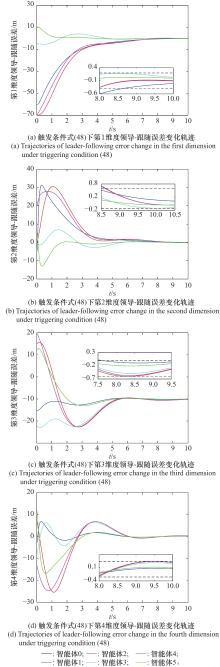
Fig.9
Leader-following error of each agent under triggering condition (48)"

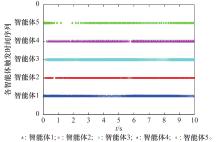
Fig.10
Triggering instant of each agent under triggering condition (48)"
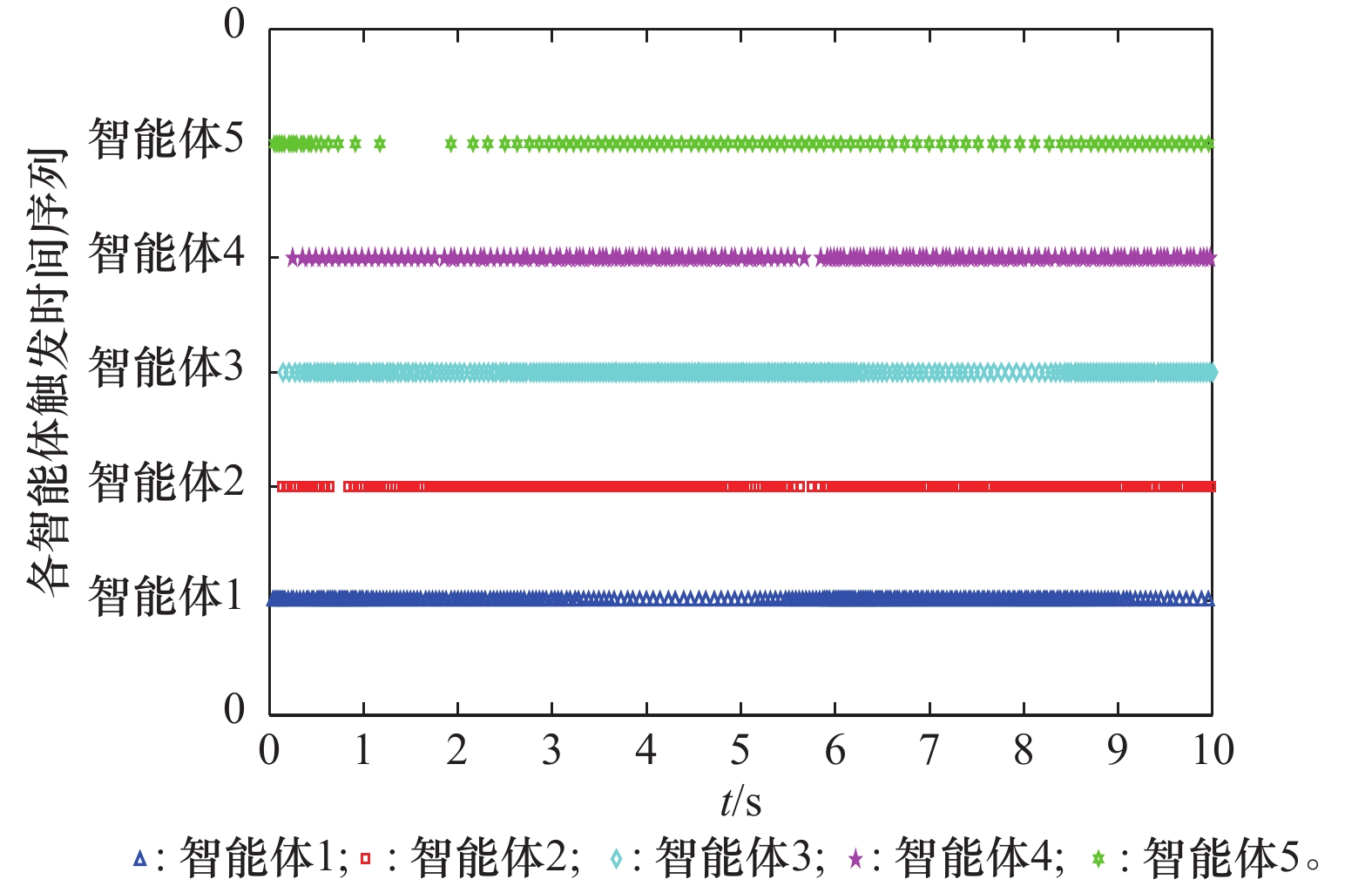
Table 1
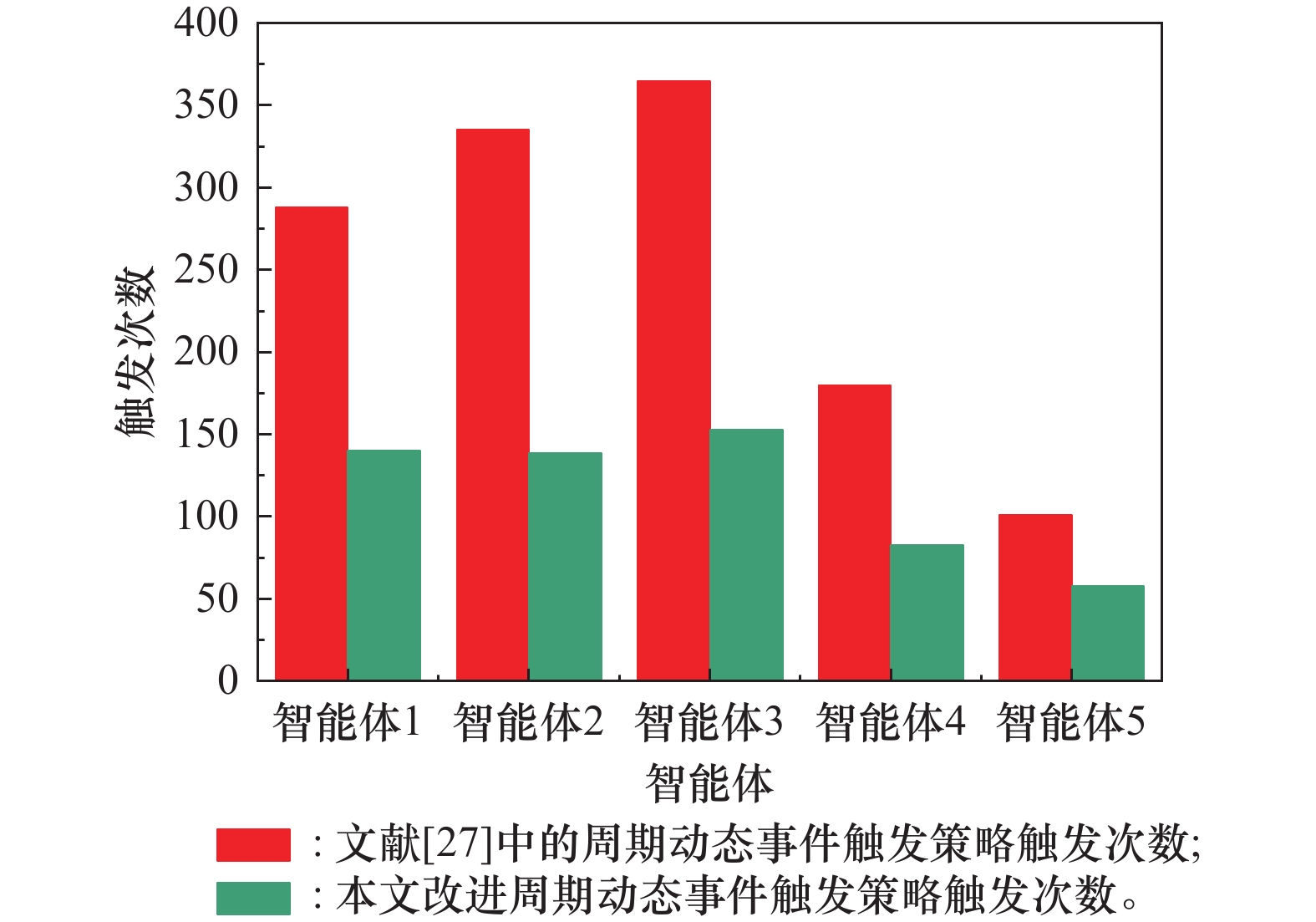
Trigger times of each agent under different triggering conditions"
| 触发 条件 | 智能体1 | 智能体2 | 智能体3 | 智能体4 | 智能体5 |
| 式(15) | 140 | 139 | 153 | 83 | 58 |
| 式(48) | 288 | 335 | 365 | 180 | 101 |
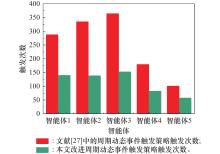
Fig.11
Trigger times of each agent under different triggering mechanisms"
| 1 | 余世明, 周景远, 何德峰, 等. 随机有界通信时延下传感器网络中的一致性时钟同步算法[J]. 控制与决策, 2020, 35 (5): 1159- 1166. |
| YU S M, ZHOU J Y, HE D F, et al. Time synchronization based on consensus in WSN with random bounded communication delay[J]. Control and Decision, 2020, 35 (5): 1159- 1166. | |
| 2 | 王长城, 戚国庆, 李银伢, 等. 传感器网络一致性分布式滤波算法[J]. 控制理论与应用, 2012, 29 (12): 1645- 1650. |
| WANG C C, QI G Q, LI Y Y, et al. Consensus-based distributed filtering algorithm in sensor networks[J]. Control Theory & Applications, 2012, 29 (12): 1645- 1650. | |
| 3 |
CHEN W, LIU G P. Privacy-preserving consensus- based distributed economic dispatch of smart grids via state decomposition[J]. IEEE/CAA Journal of Automatica Sinica, 2024, 11 (5): 1250- 1261.
doi: 10.1109/JAS.2023.124122 |
| 4 |
LI K W, FENG K L, LI Y M. Fuzzy adaptive fault-tolerant formation control for USVs with intermittent actuator faults[J]. IEEE Trans. on Intelligent Vehicles, 2024, 9 (3): 4445- 4455.
doi: 10.1109/TIV.2024.3358351 |
| 5 | CAO X M, LI K W, LI Y M. Robust adaptive formation control for nonlinear multi-agent systems with range constraints[J]. Nonlinear Dynamics, 2024, 1123 (3): 1917- 1929. |
| 6 | 杜同春, 王波, 程浩然, 等. 聚类与信息共享的多智能体深度强化学习协同控制交通灯[J]. 电子与信息学报, 2024, 46 (2): 538- 545. |
| DU T C, WANG B, CHENG H R, et al. Multi-agent deep reinforcement learning with clustering and information sharing for traffic light cooperative control[J]. Journal of Electronics & Information Technology, 2024, 46 (2): 538- 545. | |
| 7 |
TABUADA P. Event-triggered real-time scheduling of stabilizing control tasks[J]. IEEE Trans. on Automatic Control, 2007, 52 (9): 1680- 1685.
doi: 10.1109/TAC.2007.904277 |
| 8 | ZHANG L M, SUN J, YANG Q K. Distributed model-based event-triggered leader-follower consensus control for linear continuous-time multiagent systems[J]. IEEE Trans. on Systems, Man, and Cybernetics: Systems, 2020, 51 (10): 6457- 6465. |
| 9 |
ZHANG J, ZHANG H G, CAI Y L, et al. Consensus control for nonlinear multi-agent systems with event-triggered communications[J]. Applied Mathematics and Computation, 2021, 408, 126341- 126357.
doi: 10.1016/j.amc.2021.126341 |
| 10 | CHENG Y. Fully distributed event-triggered leader-follower tracking control for multi-agent systems over directed switching networks[C]// Proc. of the 40th Chinese Control Conference, 2021: 5362−5366. |
| 11 |
LUO Y P, PANG J L. Observer-based event-triggered finite-time consensus for general linear leader-follower multi-agent systems[J]. Advances in Continuous and Discrete Models, 2022, 2022 (1): 40- 57.
doi: 10.1186/s13662-022-03711-x |
| 12 | SUN Y, PENG S. Consensus of discrete-time leader-following linear multi-agent systems under lyapunov-function-based event-triggered mechanism[J]. IEEE Trans. on Circuits and Systems II: Express Briefs, 2023, 70 (12): 4409- 4413. |
| 13 | 张国庆, 徐轶晖, 李纪强, 等. 基于异步搜寻制导的机/船协同事件触发控制[J]. 系统工程与电子技术, 2025, 47 (9): 3058- 3065. |
| ZHANG G Q, XU Y H, LI J Q, et al. Event-triggered control for USV/UAV based on asynchronous search guidance[J]. Systems Engineering and Electronics, 2025, 47 (9): 3058- 3065. | |
| 14 | GIRARD A. Dynamic triggering mechanisms for event-triggered control[J]. IEEE Trans. on Automatic Control, 2014, 60 (7): 1992- 1997. |
| 15 | TARBOURIECH S, GIRARD A. LMI-based design of dynamic event-triggering mechanism for linear systems[C]//Proc. of the IEEE Conference on Decision and Control, 2018: 121−126. |
| 16 | HU S W, QIU J L, CHEN X Y, et al. Dynamic event-triggered control for leader-following consensus of multiagent systems with the estimator[J]. IET Control Theory & Applications, 2022, 16 (4): 475- 484. |
| 17 | CHEN J J, CHEN B S, ZENG Z G. Leader- following consensus of linear multi-agent systems via dynamic event-triggered adjustable control protocol[C]//Proc. of the IEEE 14th International Conference on Advanced Computational Intelligence, 2022: 21−28. |
| 18 |
RUAN X L, FENG J W, XU C, et al. Observer-based dynamic event-triggered strategies for leader-following consensus of multi-agent systems with disturbances[J]. IEEE Trans. on Network Science and Engineering, 2020, 7 (4): 3148- 3158.
doi: 10.1109/TNSE.2020.3017493 |
| 19 | YANG R H, SU X W, ZHANG S X, et al. Simultaneous fault detection and leader-following consensus for multiagent systems with directed graphs via dynamic event-triggered strategy[J]. IEEE Trans. on Instrumentation and Measurement, 2023, 72, 1- 11. |
| 20 | ZHANG J, ZHANG H G, WANG W, et al. Adaptive dynamic event-triggered distributed output observer for leader-follower multiagent systems under directed graphs[J]. IEEE Trans. on Neural Networks and Learning Systems, 2024, 35 (12): 17440- 17449. |
| 21 |
LUO S P, YE D. Double event-triggered control for linear multi-agent systems with augmented dynamic triggering mechanisms[J]. Applied Mathematics and Computation, 2020, 386, 125522- 125536.
doi: 10.1016/j.amc.2020.125522 |
| 22 |
GUAN J C, REN H W, TAN G L. Distributed dynamic event-triggered control to leader-following consensus of nonlinear multi-agent systems with directed graphs[J]. Entropy, 2024, 26 (2): 113- 127.
doi: 10.3390/e26020113 |
| 23 | LIU X, HE S H, WU Y Q. Distributed dynamic event-triggered leader-following consensus for nonlinear multiagent systems over fading channel[J]. IEEE Trans. on Cybernetics, 2023, 54 (8): 4593- 4602. |
| 24 |
范泉涌, 张乃宗, 唐勇, 等. 基于动态事件触发通信协议的多智能体系统自适应可靠控制[J]. 自动化学报, 2024, 50 (5): 924- 936.
doi: 10.16383/j.aas.c230766 |
|
FAN Q Y, ZHANG N Z, TANG Y, et al. Adaptive reliable control of multi-agent systems based on dynamic event-triggered communication protocol[J]. Acta Automatica Sinica, 2024, 50 (5): 924- 936.
doi: 10.16383/j.aas.c230766 |
|
| 25 | HEEMELS W, DONKERS M C F, TEEL A R. Periodic event-triggered control based on state feedback[C]//Proc. of the IEEE 50th Conference on Decision and Control and European Control Conference, 2011: 2571−2576. |
| 26 |
LI S, CHEN Y, LIU P X. Double event-triggered leader-following consensus and fault detection for Lipschitz nonlinear multi-agent systems via periodic sampling strategy[J]. Nonlinear Dynamics, 2023, 111 (9): 8293- 8311.
doi: 10.1007/s11071-023-08268-2 |
| 27 | LIN N, LING Q. Dynamic periodic event-triggered consensus protocols for linear multiagent systems with network delay[J]. IEEE Systems Journal, 2022, 17 (1): 1204- 1215. |
| 28 | LI C C, ZHAO X D, CHEN M, et al. Dynamic periodic event-triggered control for networked control systems under packet dropouts[J]. IEEE Trans. on Automation Science and Engineering, 2023, 21 (1): 906- 920. |
| 29 |
ZHENG S Q, LI Z P, ZHAI C, et al. Periodic event-triggered secure consensus for networked mechanical systems under denial-of-service attacks[J]. Control Theory and Technology, 2024, 22 (1): 1- 13.
doi: 10.1007/s11768-023-00182-7 |
| 30 |
WANG W X, YE H T, LUO W G, et al. Asymmetric bipartite consensus of multi-agent systems under periodic detection event-triggered mechanism[J]. Electronics, 2022, 11 (13): 2036- 2050.
doi: 10.3390/electronics11132036 |
| 31 |
QI Y N, MU R, ZHANG X F. Periodic event-triggered bipartite consensus for multi-agent systems with partial information transmission[J]. Asian Journal of Control, 2022, 24 (5): 2778- 2786.
doi: 10.1002/asjc.2648 |
| 32 |
CAI Y L, WANG Y C, LI W H, et al. Distributed bipartite consensus of linear multi-agent systems based on periodic event-triggered mechanism[J]. International Journal of Robust and Nonlinear Control, 2023, 33 (10): 5775- 5799.
doi: 10.1002/rnc.6668 |
| 33 |
WU X J, DING S, XU N, et al. Periodic event-triggered bipartite containment control for nonlinear multi-agent systems with input delay[J]. International Journal of Systems Science, 2024, 55 (10): 2008- 2022.
doi: 10.1080/00207721.2024.2328780 |
| 34 | SLOTINE J J E, LI W. Applied nonlinear control [M]. Englewood Cliffs: Prentice Hall, 1991. |
| [1] | Zhilong YU, Yinghui LI, Binbin PEI, Xiaocong DUAN, Zhe ZHANG. Adaptive fault-tolerant attitude control of tailless aircraft based on event-triggered sampling [J]. Systems Engineering and Electronics, 2024, 46(3): 1058-1066. |
| [2] | Jun YOU, Ke ZHANG, Zhiguo HAN, Tianxing CAI, Cheng ZHANG. Three-dimensional super-twisting slide mode cooperative guidance law with line-of-sight angle constraint [J]. Systems Engineering and Electronics, 2023, 45(7): 2138-2149. |
| [3] | Yi ZHANG, Hao YU, Xiuxia YANG, Zijie JIANG. Adaptive group formation tracking-containment control for heterogeneous unmanned swarm [J]. Systems Engineering and Electronics, 2023, 45(10): 3274-3285. |
| [4] | Shuangshuang WANG, Chuntao LI, Zhen WANG, Zikang SU, Fei DAI. Design of carrier landing controller based on adaptive dynamic inversion [J]. Systems Engineering and Electronics, 2022, 44(1): 218-225. |
| [5] | Zhe LUO, Wanzhen QUAN, Purui ZHANG, Xiaogang YANG. Consensus tracking control for one-side Lipschitz nonlinear multi-agent systems [J]. Systems Engineering and Electronics, 2022, 44(1): 279-284. |
| [6] | Yiming ZHANG, Jianliang AI. Positioning of aerial refueling drogue and docking control based on binocular vision [J]. Systems Engineering and Electronics, 2021, 43(10): 2940-2953. |
| [7] | Zongxing LI, Rui ZHANG. Missile adaptive attitude control based on Riccati equation [J]. Systems Engineering and Electronics, 2020, 42(6): 1358-1365. |
| [8] | TANG Weiqiang, LONG Wenkun, SUN Lijuan, HUANG Xiaoli. Multiple model adaptive control of nonlinear systems based on clustering method and neural network [J]. Systems Engineering and Electronics, 2019, 41(9): 2100-2106. |
| [9] | TAO Jiawei, ZHANG Tao. Coupled control of relative position and attitude for spacecraft proximity operations with prescribed performance [J]. Systems Engineering and Electronics, 2019, 41(5): 1103-1109. |
| [10] | LI Guiying, YU Zhigang, ZHANG Yang. Cooperative guidance law with angle constraint to intercept maneuvering target [J]. Systems Engineering and Electronics, 2019, 41(3): 626-635. |
| [11] | ZHONG Jingyang, SONG Bifeng. Position control of a tail-sitter MAV based on L1 adaptive controller in hover stage [J]. Systems Engineering and Electronics, 2018, 40(9): 2062-2070. |
| [12] | SHEN Zhipeng, WANG Ru. Adaptive sliding mode trajectory tracking control of underactuated ship based on DSC-MLP [J]. Systems Engineering and Electronics, 2018, 40(3): 643-651. |
| [13] | WANG Chao, ZHANG Shengxiu, SONG Zibiao, YANG Jianye, WU Xiaolu. Aircraft anti-windup of robust adaptive nonlinear predictive control [J]. Systems Engineering and Electronics, 2018, 40(2): 393-400. |
| [14] | WEI Yang, XU Haojun, XUE Yuan. Adaptive disturbance rejection controller design for UAV three dimensional formation keeping#br# [J]. Systems Engineering and Electronics, 2018, 40(12): 2758-2765. |
| [15] | XIA Chuan, DONG Chaoyang, WANG Qing, CHENG Haoyu. Adaptive integrated guidance and control backstepping sliding mode design for blended control missile#br# [J]. Systems Engineering and Electronics, 2018, 40(10): 2325-2333. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||